
A Semi-Linear Elliptic Model for a Circular Membrane MEMS Device Considering the Effect of the Fringing Field

 ,
,  , and
, and 
Abstract
:1. Introduction
- Shooting procedure, Keller-box scheme, and III/IV Stage Lobatto IIIa formulas have been employed, and their numerical performances, related to the membrane profile recovering task, when varies in the range of its possible values, have been compared. Furthermore, the values of the parameter ensuring the procedures’ convergence have been determined.
- Ghost solutions have been investigated for obtaining the values of the factor that ensures the convergence of each considered numerical procedure, avoiding the ghost solutions’ computation.
- Finally, the relationship among the numerical convergence criteria, the parameter , and the intended use of the device has been highlighted.
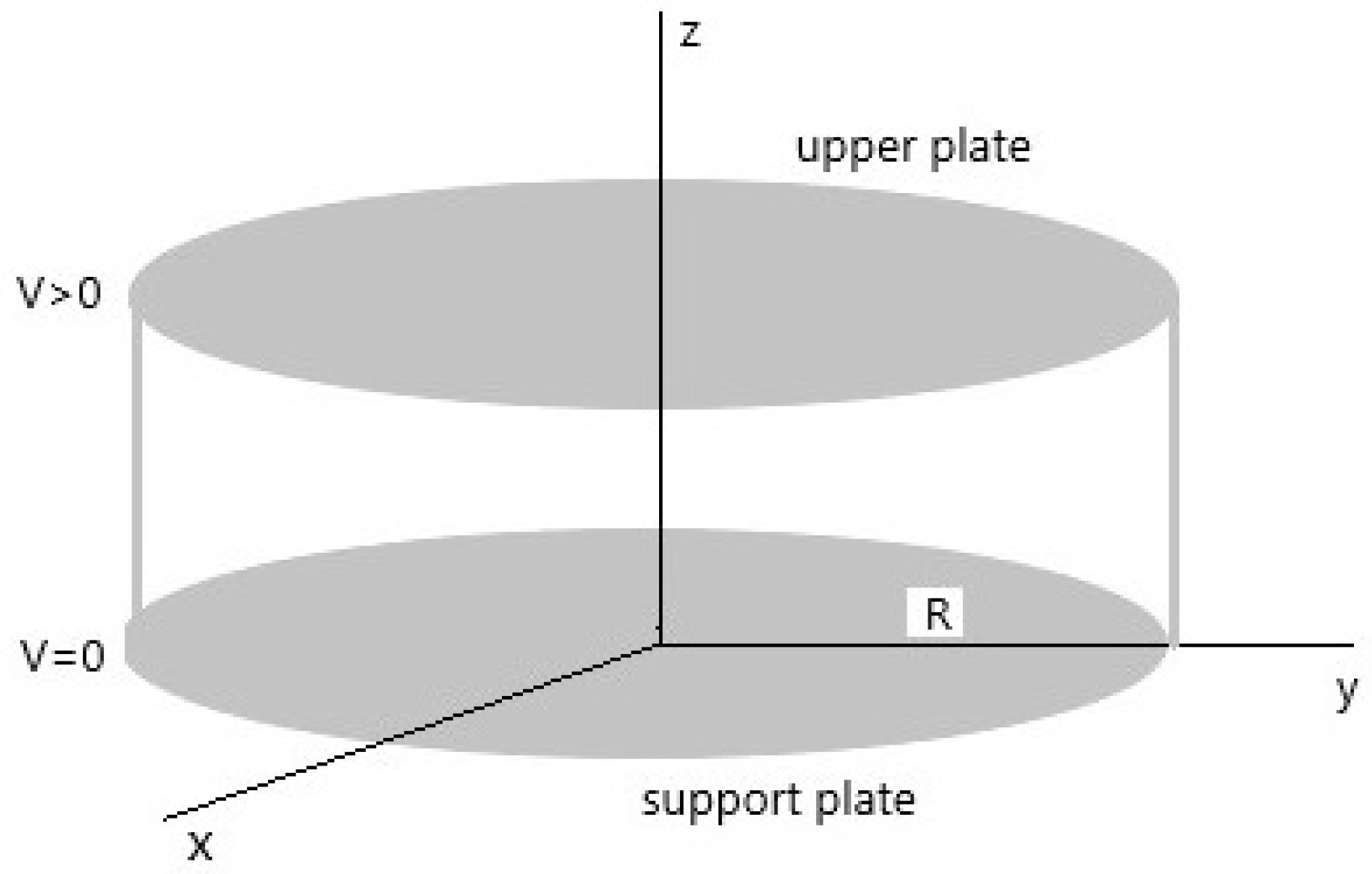
2. A Description of the 2D Electrostatic Circular-Membrane MEMS Device
2.1. The Point of View of the Actuator
2.2. The Point of View of the Sensor
3. The Mathematical Model
4. On the Existence of At Least One Solution
5. A Well-Known Result of Uniqueness
6. A New Condition Ensuring the Uniqueness of the Solution
7. A New Algebraic Condition Ensuring Both the Existence and Uniqueness
8. Numerical Results
8.1. Detection of Ghost Solutions
8.2. On the Convergence of the Numerical Procedures
8.3. A Few Remarks on the Number of Nodes N
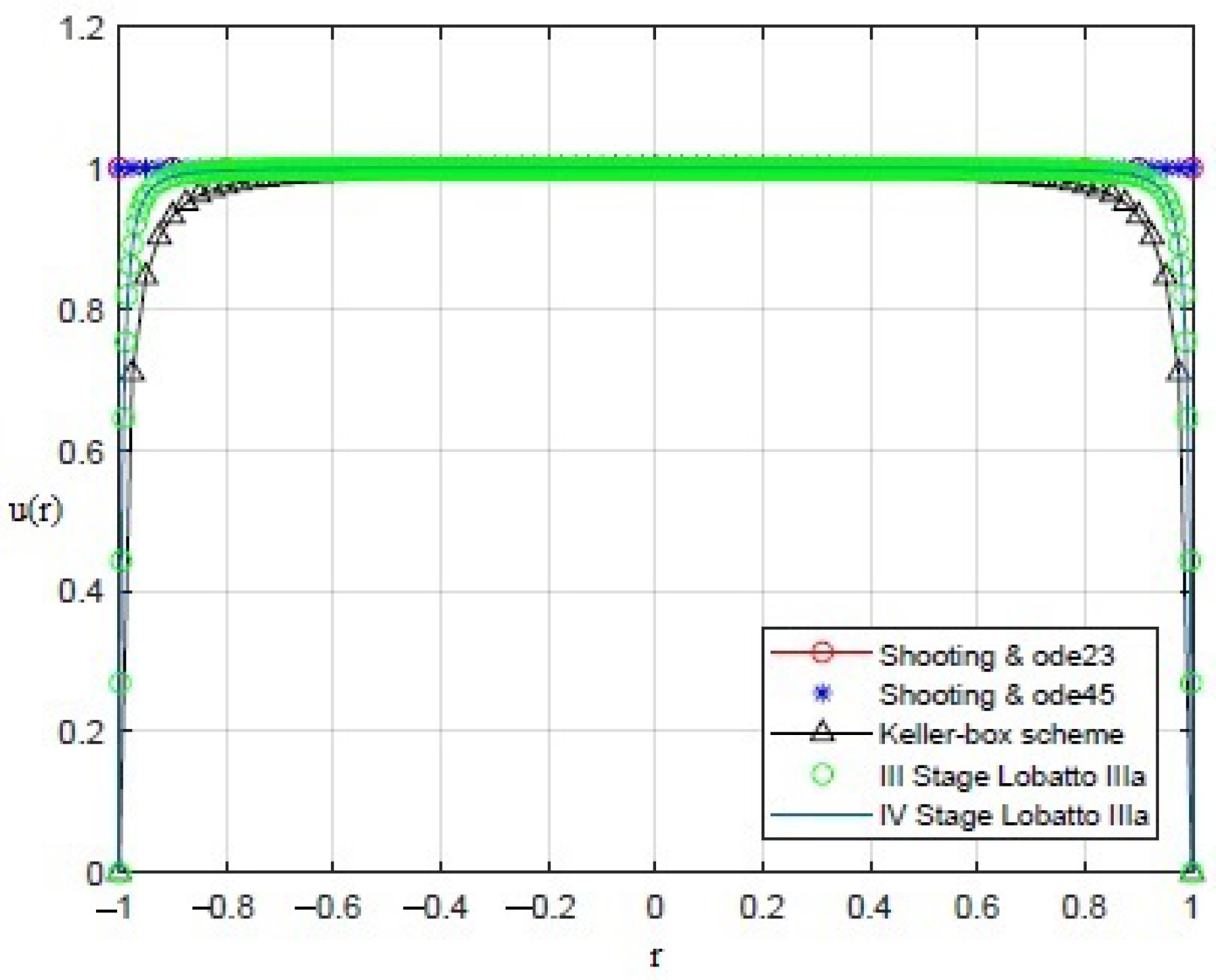
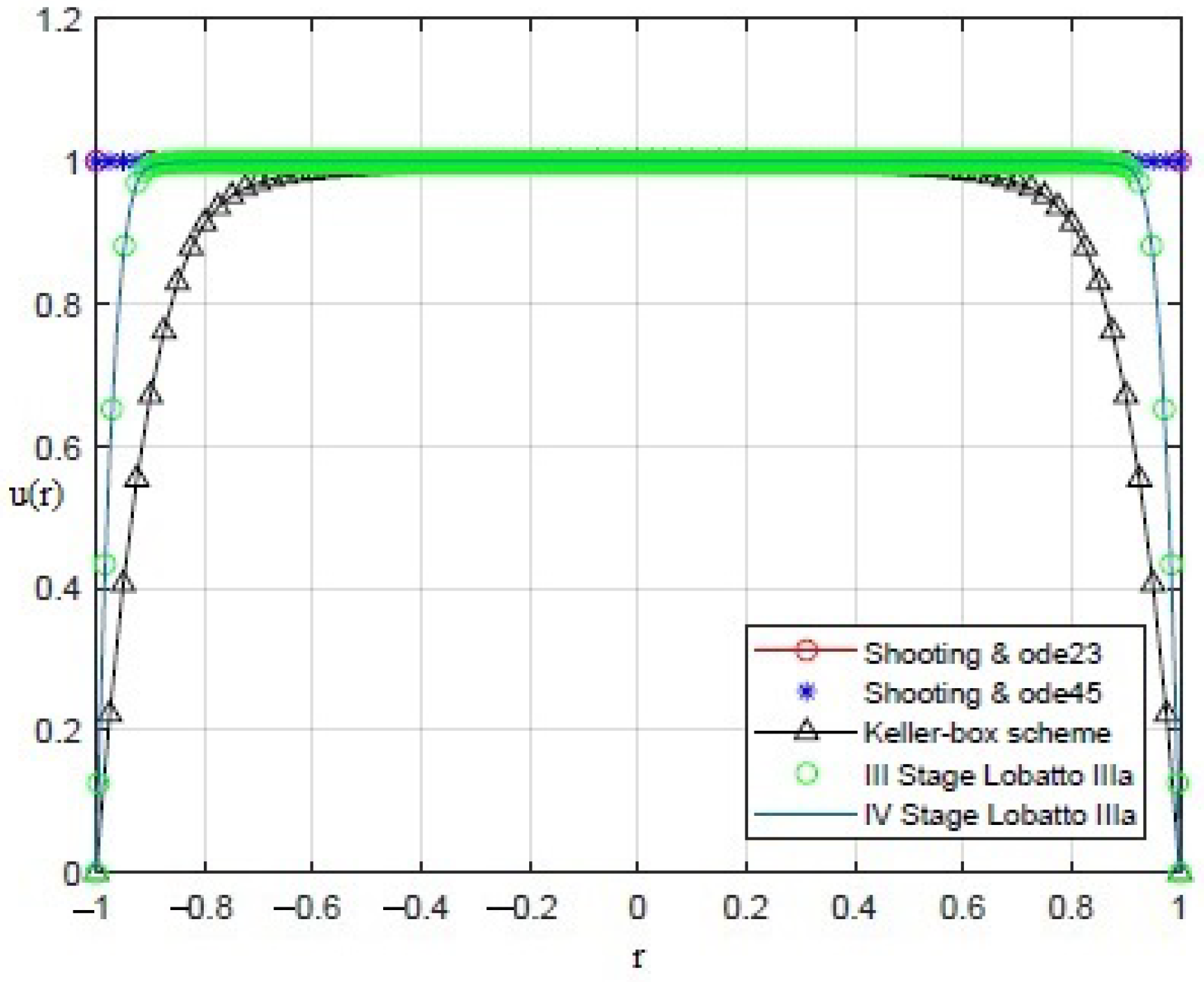
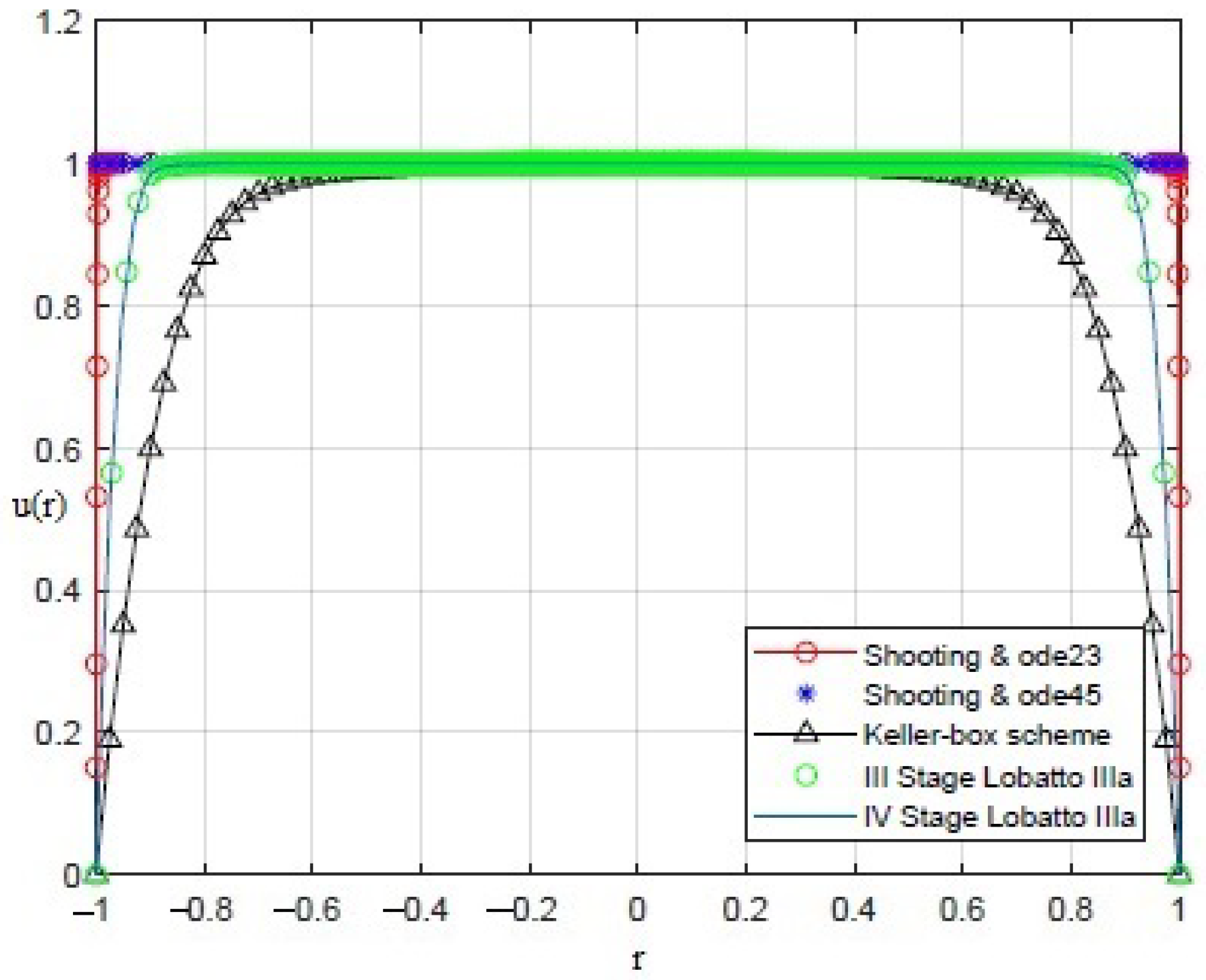
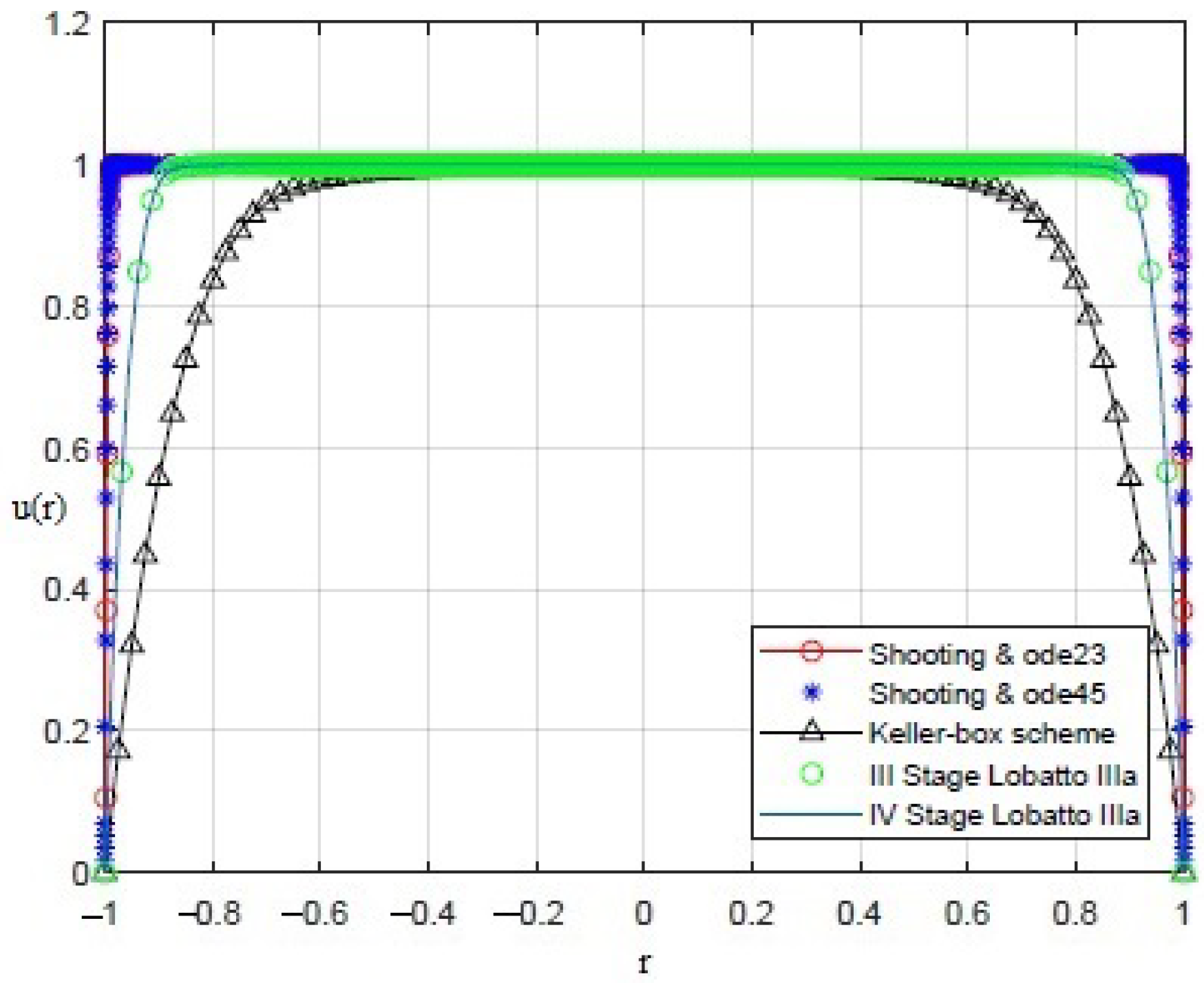
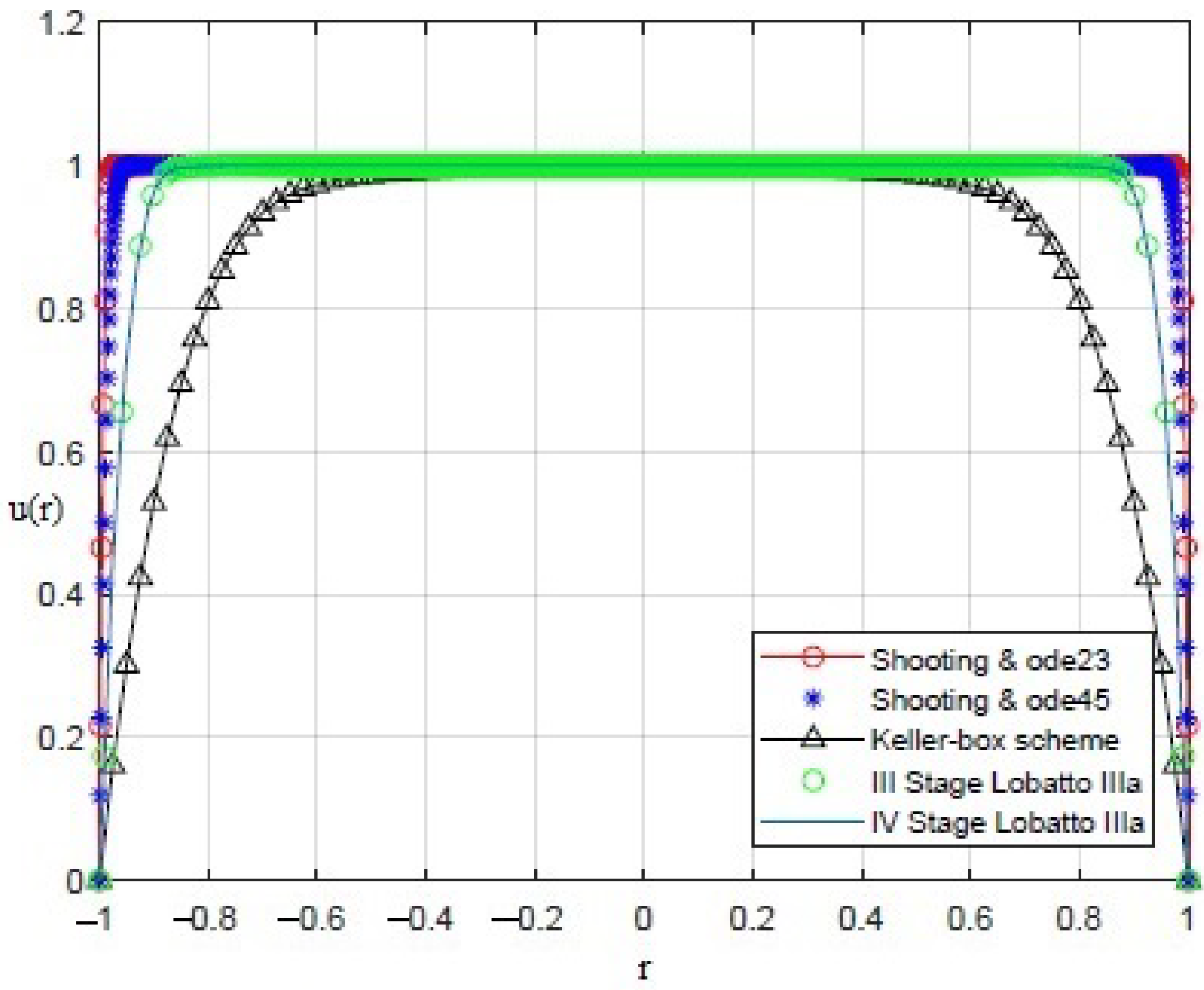
8.4. The Recovering of the Membrane Profile: Performance of Numerical Procedures
8.5. to Overcome the Inertia of the Membrane with Fringing Field
8.6. Properties of the Material Constituting the Membrane & Intended Use of the Device in Non-Convergence Conditions
8.7. Properties of the Material Constituting the Membrane & Intended Use of the Device in the Presence of Ghost Solutions
8.8. Properties of the Material Constituting the Membrane and Intended Use of the Device in Absence of Ghost Solutions
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| bounded circular smooth domain | |
| d | distance between the two parallel disks |
| r | radial coordinate |
| R | radius of the device |
| profile of the membrane | |
| V | external electrical voltage |
| T | radial mechanical tension of the membrane at rest |
| parameter depending on V and T | |
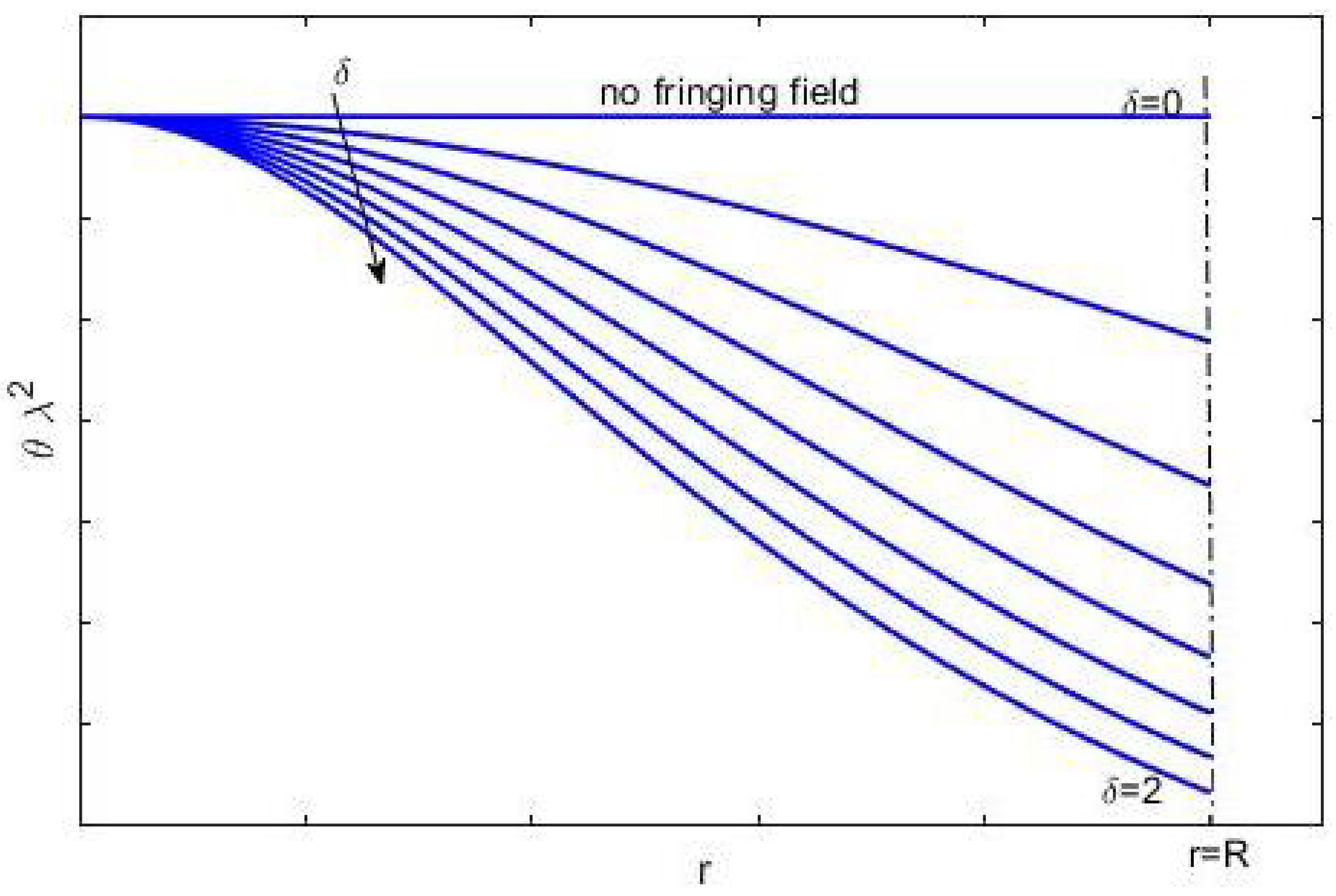
| parameter that weighs the fringing field effect | |
| electrostatic field | |
| amplitude of the electrostatic field | |
| mean curvature | |
| critical security distance | |
| factor of proportionality | |
| permittivity of the free space | |
| electrostatic force | |
| electrostatic pressure | |
| p | mechanical pressure |
| displacement in the center of the membrane | |
| electrostatic capacitance | |
| density | |
| h | thickness |
| Y | Young modulus |
| Poisson ratio | |
| D | stiffness coefficient |
| function of proportionality | |
| , | auxiliary functions |
| k | constant of proportionality between p and |
| H | |
| FEM | Finite Element Method |
| tolerance for Brent procedure | |
| tolerance for Keller–Box Scheme | |
| Runge–Kutta Methods | |
| Green function |
Appendix A. Proof of Proposition 1
References
- Pelesko, J.A.; Bernstein, D.H. Modeling MEMS and NEMS; Chapman & Hall/CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA; Washington, DC, USA, 2003. [Google Scholar]
- Di Barba, P.; Wiak, S. MEMS: Field Models and Optimal Design; Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Pelesko, J.A. Electrostatic in MEMS and NEMS; Micromechanics and Nanoscale Effects; Springer: Dordrecht, The Netherlands, 2004. [Google Scholar]
- Adrian, R.J.; Agarwal, R.K.; Beheim, G.M.; Bergstrom, P.L.; Bernestein, G.H.; Beskok, A.; Bewley, T.R.; Breuer, K.S.; Chang, H.C.; Chen, L.-Y.; et al. The MEMS Handbook; Gad-el-Hak, M., Ed.; CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA; Washington, DC, USA, 2015. [Google Scholar]
- Lindros, V.; Tilli, M.; Lohto, A.; Motooka, T. Handbook of Silicon Based MEMS Materials and Technologies; Tilli, M., Paulasto-Kröckel, M., Petzold, M., Theuss, H., Motooka, T., Lindroos, V., Eds.; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Versaci, M.; Morabito, F.C. Fuzzy Time Series Approach for Disruption Prediction in Tokamak Reactors. IEEE Trans. Magn. 2003, 39, 1503–1506. [Google Scholar] [CrossRef]
- Peushuai, S.; Chaowei, S.; Zhang, M.; Zhao, Y.; He, Y.; Liu, W.; Wang, X. A Movel Piezoresistive MEMS Pressure Sensors Based on Temporary Bonding Technology. Sensors 2020, 20, 337. [Google Scholar]
- Setiono, A.; Bertke, M.; Nyang’au, W.O.; Xu, J.; Fahrbach, M.; Kirsch, I.; Uhde, E.; Deutschinger, A.; Fantner, E.J.; Peiner, E.; et al. In-Plane and Out-of-Plane MEMS Piezoresistive Cantilever Sensors for Nanoparticle Mass Detection. Sensors 2020, 20, 618. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Fu, Q.; Zhang, Y.; Zhang, W.; Chen, D.; Yin, L.; Liu, X. A Digital Closed-Loop Sense MEMS Disk Resonator Gyroscope Circuit Design Based on Integrated Analog Front-End. Sensors 2020, 20, 687. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Younis, M.I.; Nayfeh, A.H. A Study of the Nonlinear Response of a Resonant Microbeam to an Electric Actuation. Nonlinear Dyn. 2003, 31, 91–117. [Google Scholar] [CrossRef]
- Wang, X.; Huan, R.; Zhu, W.; Pu, D.; Wei, X. Frequency Locking in the Internal Resonance of Two Electrostatically Coupled Micro-Resonators with Frequency ratio 1:3. Mech. Syst. Signal Process. 2021, 146, 106981. [Google Scholar] [CrossRef]
- Abdolvand, R.; Bahreyni, B.; Lee, J.E.Y.; Nabki, F. Micromachined Resonators, A Review. Micromachines 2016, 7, 160. [Google Scholar] [CrossRef]
- Shao, X.; Si, H.; Zhang, W. Fuzzy Wavelet Neural Control with Improved Prescribed Performance for MEMS Byroscope Subject to Input Quantization. Fuzzy Sets Syst. 2021, 411, 136–154. [Google Scholar] [CrossRef]
- Ali, I.A. Modeling and Simulation of MEMS Components: Challenges and Possible Solutions, Micromachining Techniques for Fabrication of Micro and Nano Structures; Springer Nature: Singapore, 2012. [Google Scholar]
- Bechtold, T.; Schrag, G.; Fent, L. System-Level Modeling of MEMS; Wyley-VCH Verlag GmbH & Co. KGaA: London, UK, 2013. [Google Scholar]
- Zhu, J. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef] [Green Version]
- Quakad, H. Electrostatic Fringing-Fields Effects on the Structural Behavior of MEMS Shallow Arches. Microsyst. Technol. 2018, 24, 1394–1399. [Google Scholar]
- de Oliveira Hanse, R.; Mátéfi-Tempfli, M.; Safonovs, R.; Adam, J.; Chemnitz, S.; Reimer, T.; Wagner, B.; Benecke, W.; Mátéfi-Tempfli, S. Magnetic Films for Electromagnetic Actuation in MEMS Switches. Microsyst. Technol. 2018, 24, 1394–1399. [Google Scholar] [CrossRef]
- Mohammadi, A.; Ali, N. Effect of High Electrostatic Actuation on Thermoelastic Damping in Thin Rectangular Microplate Resonators. J. Theor. Appl. Mech. 2015, 53, 317–329. [Google Scholar] [CrossRef] [Green Version]
- Farhangian, F.; Landry, R., Jr. Accuracy Improvement of Attitude Determination Systems Using EKF-Based Error Prediction Filter and PI Controller. Sensors 2020, 20, 4055. [Google Scholar] [CrossRef]
- Zhou, N.; Jia, P.; Liu, J.; Ren, Q.; An, G.; Liang, T.; Xiong, J. MEMS-Based Reflective Intensity-Modulated Fiber-Optic Sensor for Pressure Measurements. Sensors 2020, 20, 2233. [Google Scholar] [CrossRef]
- Nathanson, H.; Newell, W.; Wickstrom, R.; Lewis, J. The Resonant Gate Transistor. IEEE Trans. Electron Device 1964, 14, 117–133. [Google Scholar] [CrossRef]
- Di Barba, P.; Fattorusso, L.; Versaci, M. Electrostatic Field in Terms of Geometric Curvature in Membrane MEMS Devices. Commun. Appl. Ind. Math. 2017, 8, 165–184. [Google Scholar] [CrossRef] [Green Version]
- Di Barba, P.; Fattorusso, L.; Versaci, M. A 2D Non-Linear Second-Order Differential Model for Electrostatic Circular Membrane MEMS Devices: A Result of Existence and Uniqueness. Mathematics 2019, 7, 1193. [Google Scholar] [CrossRef] [Green Version]
- Versaci, M.; Morabito, F.C. Electrostatic Circular Membrane MEMS: An Approach to the Optimal Control. Computation 2021, 7, 41. [Google Scholar] [CrossRef]
- Versaci, M.; Morabito, F.C. Membrane Micro Electro-Mechanical Systems for Industrial Applications; Handbook of Research on Advanced Mechatronic Systems and Intelligent Robotics; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Esposito, P.; Ghoussoub, N.; Guo, Y. Mathematical Analysis of Partial Differential Equations Modeling Electrostatic MEMS; American Mathematical Society: New York, NY, USA, 2010. [Google Scholar]
- Liu, D.; Liu, H.; Liu, J.; Hu, F.; Fan, J.; Wu, W.; Tu, L. Temperature Gradient Method for Alleviating Bonding-Induced Warpage in a High-Precision Capacitive MEMS Accelerometer. Sensors 2020, 20, 1186. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, B.; Li, H.; Shen, S.; Li, F.; Ni, W.; Cao, W. Investigation of Potting-Adhesive-Induced Thermal Stress in MEMS Pressure Sensors. Sensors 2021, 21, 2011. [Google Scholar] [CrossRef]
- Versaci, M.; Di Barba, P.; Morabito, F.C. Curvature-Dependent Electrostatic Field as a Principle for Modelling Membrane-Based MEMS Devices. A Review. Membranes 2020, 10, 361. [Google Scholar] [CrossRef] [PubMed]
- Angiulli, G.; Jannelli, A.; Morabito, F.C.; Versaci, M. Reconstructing the Membrane Detection of a 1D Electrostatic-Driven MEMS Device by the Shooting Method: Convergence Analysis and Ghost Solutions Identification. Comput. Appl. Math. 2018, 37, 4484–4498. [Google Scholar] [CrossRef]
- Versaci, M.; Jannelli, A.; Angiulli, G. Electrostatic Micro-electro-Mechanical-Systems (MEMS) Devices: A Comparison Among Numerical Techniques for Recovering the Membrane Profile. IEEE Access 2020, 8, 125874–125886. [Google Scholar] [CrossRef]
- Howell, L.L.; Luon, S.M. Thermomechanical in-Plane Microactuator, (TIM). U.S. Patent N. US6734597B1, 11 May 2004. [Google Scholar]
- Farokhi, H.; Ghayesh, M.H. Nonlinear Thermo-Mechanical Behaviour of MEMS Resonators. Membranes 2017, 23, 5303–5315. [Google Scholar] [CrossRef]
- Ren, Z.; Yuan, J.; Su, X.; Mangla, S.; Nam, C.Y.; Lu, M.; Camino, F.; Shi, Y. Thermo-Mechanical Modeling and Experimental Validation for Multilayered Metallic Microstructures. Microsyst. Technol. 2020, 21, 751–783. [Google Scholar] [CrossRef]
- Mistry, K.K.; Mahapatra, A. Design and Simulation of a Thermo-Transfer Type MEMS Based Micro Flow Sensor for Arteria Blood Flow Measurement. Microsyst. Technol. 2012, 18, 683–692. [Google Scholar] [CrossRef]
- Scaccabarozzi, D.; Saggin, B.; Somaschini, R.; Magni, M.; Valnegri, P.; Esposito, F.; Molfese, C.; Cozzolino, F.; Mongelluzzo, G. “MicroMED” Optical Particle Counter: From Design to Flight Model. Sensors 2020, 20, 611. [Google Scholar] [CrossRef] [Green Version]
- Di Barba, P.; Mognaschi, M.E.; Sieni, E. Many Objective Optimization of a Magnetic Micro-Electro-Mechanical (MEMS) Micromirror with Bounded MP-NSGA Algorithm. Mathematics 2020, 8, 1509. [Google Scholar] [CrossRef]
- Akoz, G.; Gokdel, Y.D. Field-of-View Optimization of Magnetically Actuated 2D Gimballed Scanners. Turk. J. Electr. Eng. Comput. Sci. 2020, 28, 2385–2399. [Google Scholar] [CrossRef]
- Patterson, L.H.; Walker, J.L.; Naivar, M.A.; Rodriguez-Mesa, E.; Hoonejani, M.R.; Shields, K.; Foster, J.S.; Doyle, A.M.; Valentine, M.T.; Foster, K.L. Inertial Flow Focusing: A Case Studi in Optimixing Cellular Trajectory Through a Microfluidic MEMS Device for Timing-Critical Application. Biomed. Microdevices 2020, 22, 1–12. [Google Scholar] [CrossRef]
- Can Atik, A.; Ozkan, M.D.; Ozgur, E.M.; Kulah, H.; Yildirim, E. Modeling and Fabrication of Electrostatically Actuated Diaphragms for on-Chip Valving of MEMS Compatible Microfluidic Systems. J. Micromech. Microeng. 2020, 30, 115001. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, X.; Kundu, S.; Nag, A.; Afsarimanesh, N.; Sapra, S.; Mukhopadhyay, S.C.; Han, T. Silicon-Based Sensors for Biomedical Applications: A Review. Sensors 2019, 19, 2908. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Chen, C.; Deshp, V.V.; Lee, G.H.; Lee, I.; Lekas, M.; Gondarenko, A.; Yu, Y.-J.; Shepard, K.; Hone, J.; et al. Electrically Integrated SU-8 Clamped Graphene Drum Resonators for Strain Engineering. Appl. Phys. Lett. 2013, 102, 153101. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.; Smith, A.D.; Forsberg, F.; Wagner, S.; Schröder, S.; Akbari, S.S.A.; Fischer, A.C.; Villanueva, L.G.; Östling, M.; Niklaus, F.; et al. Manufaccture and Characterization of Graphene Membranes with Suspended Silicon Proof Masses for MEMS and NEMS Applications. Microsyst. Nanoeng. 2020, 102, 1–27. [Google Scholar]
- Zhou, X.; Venkatachalam, S.; Zhou, R.; Xu, H.; Pokharel, A.; Fefferman, A.; Zaknoune, M.; Collin, E. High-Q Silicon Nitride Drum Resonators Strongly Coupled. Nano Lett. 2021, 21, 5738–5744. [Google Scholar] [CrossRef]
- Phan, A.; Truong, P.; Schade, C.; Joslin, K.; Talke, F. Analytical Modeling of an Implantable Opto-Mechanical Pressure Sensor to Study Long Term Drift. In Proceedings of the ASME 2020 29th Conference on Information Storage and Processing Systems, Virtual, Online, 2–3 June 2021. V001T06A003, ASME. [Google Scholar]
- Yen, Y.K.; Chiu, C.Y. A CNOS- MEMS-Based Membrane-Bridge Nanomechanical Sensors for Small Molecule Detection. Sci. Rep. 2020, 10, 2931. [Google Scholar] [CrossRef]
- Di Barba, P.; Fattorusso, L.; Versaci, M. A 2D Membrane MEMS Device Model with Fringing Field: Curvature-Dependent Electrostatic Field and Optimal Control. Mathematics 2021, 6, 465. [Google Scholar] [CrossRef]
- Lin, Z.; Li, X.; Jin, Z.; Qian, J. Fluid-Structure Interaction Analysis on Membrane Behavior of a Microfluidic Passive Valve. Membranes 2020, 10, 300. [Google Scholar] [CrossRef]
- Pal, M.; Lalengkima, C.; Maity, R.; Baishya, S.; Maity, N.P. Effects of Fringing Capacitances and Electrode’s Finiteness in Improved SiC Membrane Based Micromachined Ultrasonic Transducers. Microsyst. Technol. 2021. [Google Scholar] [CrossRef]
- Kottapalli, A.G.; Asadnia, M.; Miao, J.M.; Barbastathis, G.; Triantafyllou, M.S. A Flexible Liquid Crystal Polymer MEMS Pressure Sensor Array for Fish-Like Underwater Sensing. Smart Mater. Struct. 2012, 21, 281–299. [Google Scholar] [CrossRef] [Green Version]
- Versaci, M.; Mammone, N.; Ieracitano, C.; Morabito, F.C. Micropumps for Drug Delivery Systems: A New Semi-Linear Elliptic Boundary-Value Problem. Comput. Appl. Math. 2021, 40, 1–21. [Google Scholar] [CrossRef]
- Cassani, D.; d’O, M.; Ghoussoub, N. On a Fourth Order Elliptic Problem with a Singular Nonlinearity. Nonlinear Stud. 2009, 9, 189–209. [Google Scholar] [CrossRef]
- Leus, V.; Elata, D. Fringing Field Effect in Electrostatic Actuator; Technical Report ETR-2004-2; Faculty of mechanical engineering Technion—Israel Institute of Technology: Haifa, Israel, 2004. [Google Scholar]
- Weng, C.C.; Kong, J.A. Effects of Fringing Fields on the Capacitance of Circular Microstrip Disk. IEEE Trans. Microw. Theory Tech. 1980, 28, 98–104. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro Electrostatic Energy Harvester with Both Broad Bandwidth and High Normalized Power Density. Appl. Energy 2018, 212, 363–371. [Google Scholar] [CrossRef]
- Batra, R.C.; Porfiri, M.; Spinello, D. Electromechanical Model of Electrically Actuated Narrow Microbeams. J. Microelectromech. Syst. 2006, 15, 1175–1189. [Google Scholar] [CrossRef]
- Batra, R.C.; Porfiri, M.; Spinello, D. Review of Modeling Electrostatically Actuated Microelectromechanical Systems. Smart Mater. Struct. 2007, 16, 1119–1131. [Google Scholar] [CrossRef]
- Pelesko, J.A.; Driscoll, T.A. The Effect of the Small-Aspect-Ratio Approximation on Canonical Electrostatic MEMS Models. J. Eng. Math. 2005, 53, 239–252. [Google Scholar] [CrossRef] [Green Version]
- Versaci, M.; Angiulli, G.; Jannelli, A. Recovering of the Membrane Profile of an Electrostatic Circular MEMS by the Three-Stage Lobatto Procedure: A Convergence Analysis in the Absence of Ghost Solutions. Mathematics 2020, 8, 487. [Google Scholar] [CrossRef] [Green Version]
- Jonassen, N. Electrostatics; Springer Science+Business Media: New York, NY, USA, 2002. [Google Scholar]
- Timoshenko, S.; Woinowsly-Krieger, S. Theory of Plates and Shells; McGraw Hill: New York, NY, USA, 1959. [Google Scholar]
- Fujimoto, M. Physics of Classical Electromagnetism; Springer: New York, NY, USA, 2007. [Google Scholar]
- Di Barba, P.; Fattorusso, L.; Versaci, M. Curvature-Dependent Electrostatic Field as a Principle for Modelling Membrane MEMS Device with Fringing Field. Comp. Appl. Math. 2021, 40, 1–30. [Google Scholar] [CrossRef]
- Versaci, M.; Di Barba, P.; Morabito, F.C. MEMS with Fringing Field: Curvature-Dependent Electrostatic Field and Numerical Techniques for Recovering the Membrane Profile. Comput. Appl. Math. 2021, 40, 1–28. [Google Scholar] [CrossRef]
- Bayley, P.B.; Shampine, L.F.; Waltman, P.E. Nonlinear Two Points Boundary Value Problems; Academic Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Russell, R.D.; Shampine, L.F. Numerical Methods for Singular Boundary Value Problems. SIAM J. Num. Anal. 1975, 12, 13–36. [Google Scholar] [CrossRef]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shooting (ode 23) | Shooting (ode 45) | Keller–Box | |
|---|---|---|---|
| 0 | |||
| 0.5 | |||
| 1 | |||
| 1.5 | |||
| 1.99 |
| Three-Stage Lobatto IIIa (bpv4c) | Four-Stage Lobatto IIIa (bpv5c) | |
|---|---|---|
| 0 | ||
| 0.50 | ||
| 1 | ||
| 1.50 | ||
| 1.99 |
| Shooting (ode 23) | Shooting (ode 45) | Keller–Box | |
|---|---|---|---|
| 0 | |||
| 0.5 | |||
| 1 | |||
| 1.5 | |||
| 1.99 |
| Three-Stage Lobatto IIIa (bpv4c) | Four-Stage Lobatto IIIa (bpv5c) | |
|---|---|---|
| 0 | ||
| 0.50 | ||
| 1 | ||
| 1.50 | ||
| 1.99 |
| Shooting (ode 23) | Shooting (ode 45) | Keller–Box | |
|---|---|---|---|
| 0 | |||
| 0.5 | |||
| 1 | |||
| 1.5 | |||
| 1.99 |
| Three-Stage Lobatto IIIa (bpv4c) | Four-Stage Lobatto IIIa (bpv5c) | |
|---|---|---|
| 0 | ||
| 0.50 | ||
| 1 | ||
| 1.50 | ||
| 1.99 |
| Shooting (ode 23) | Shooting (ode 45) | Keller–Box | |
|---|---|---|---|
| 0 | |||
| 0.5 | |||
| 1 | |||
| 1.5 | |||
| 1.99 |
| Three-Stage Lobatto IIIa (bpv4c) | Four-Stage Lobatto IIIa (bpv5c) | |
|---|---|---|
| 0 | ||
| 0.50 | ||
| 1 | ||
| 1.50 | ||
| 1.99 |
| Shooting (ode 23) | Shooting (ode 45) | Keller-Box | Three-Stage Lobatto IIIa (bpv4c) | Four-Stage Lobatto IIIa (bpv5c) | |
|---|---|---|---|---|---|
| 0 | 11 | 40 | 40 | 40 | 40 |
| 0.5 | 11 | 40 | 40 | 40 | 40 |
| 1 | 64 | 40 | 40 | 40 | 40 |
| 1.5 | 63 | 125 | 40 | 40 | 40 |
| 1.99 | 58 | 101 | 40 | 40 | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Versaci, M.; Jannelli, A.; Morabito, F.C.; Angiulli, G. A Semi-Linear Elliptic Model for a Circular Membrane MEMS Device Considering the Effect of the Fringing Field. Sensors 2021, 21, 5237. https://doi.org/10.3390/s21155237
Versaci M, Jannelli A, Morabito FC, Angiulli G. A Semi-Linear Elliptic Model for a Circular Membrane MEMS Device Considering the Effect of the Fringing Field. Sensors. 2021; 21(15):5237. https://doi.org/10.3390/s21155237
Chicago/Turabian StyleVersaci, Mario, Alessandra Jannelli, Francesco Carlo Morabito, and Giovanni Angiulli. 2021. "A Semi-Linear Elliptic Model for a Circular Membrane MEMS Device Considering the Effect of the Fringing Field" Sensors 21, no. 15: 5237. https://doi.org/10.3390/s21155237