Ultra-Wideband Positioning Sensor with Application to an Autonomous Ultraviolet-C Disinfection Vehicle

 ,
,
Abstract
:1. Introduction
1.1. System Description
1.2. Positioning Solutions
1.3. Traversal Path Planning
2. Related Works
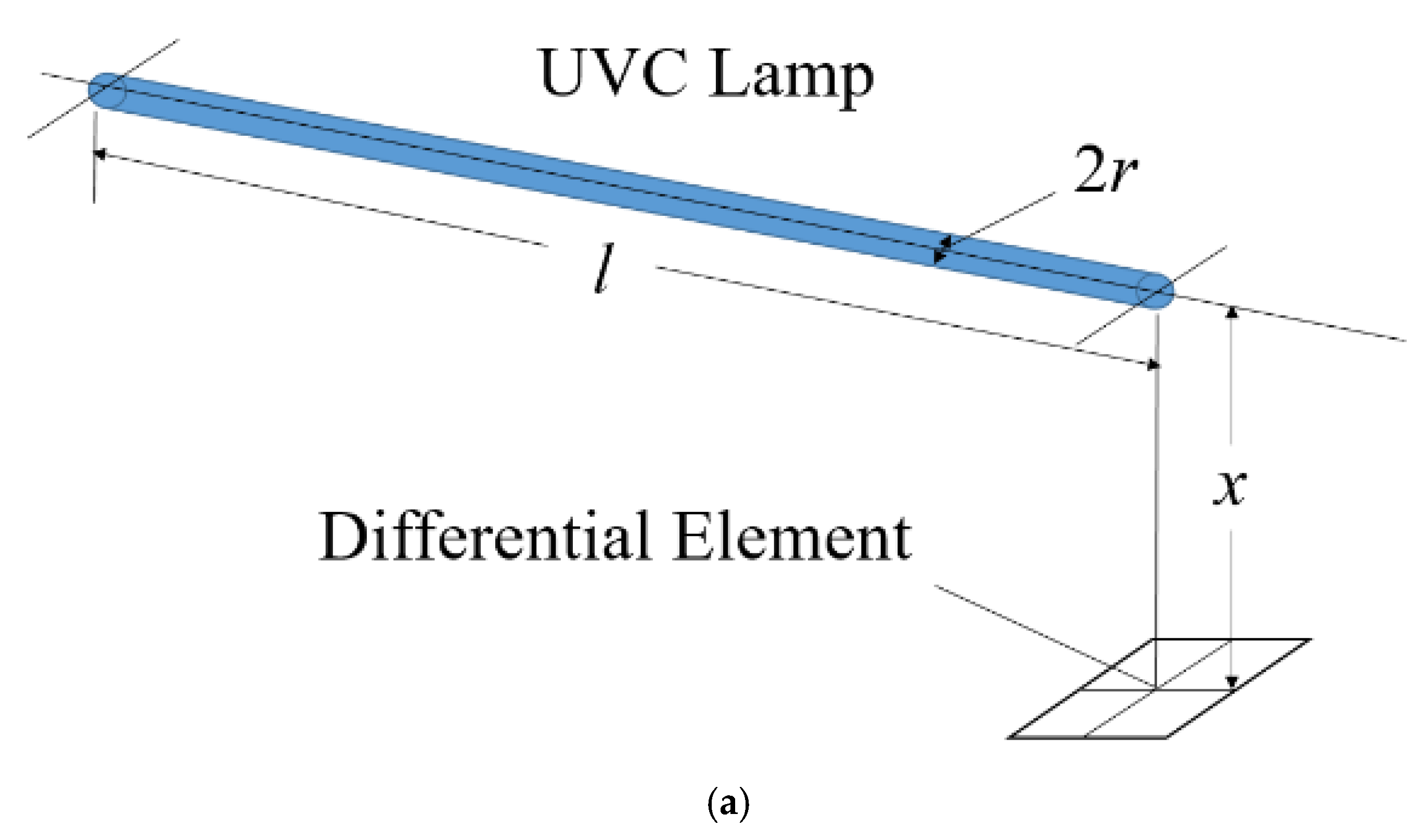
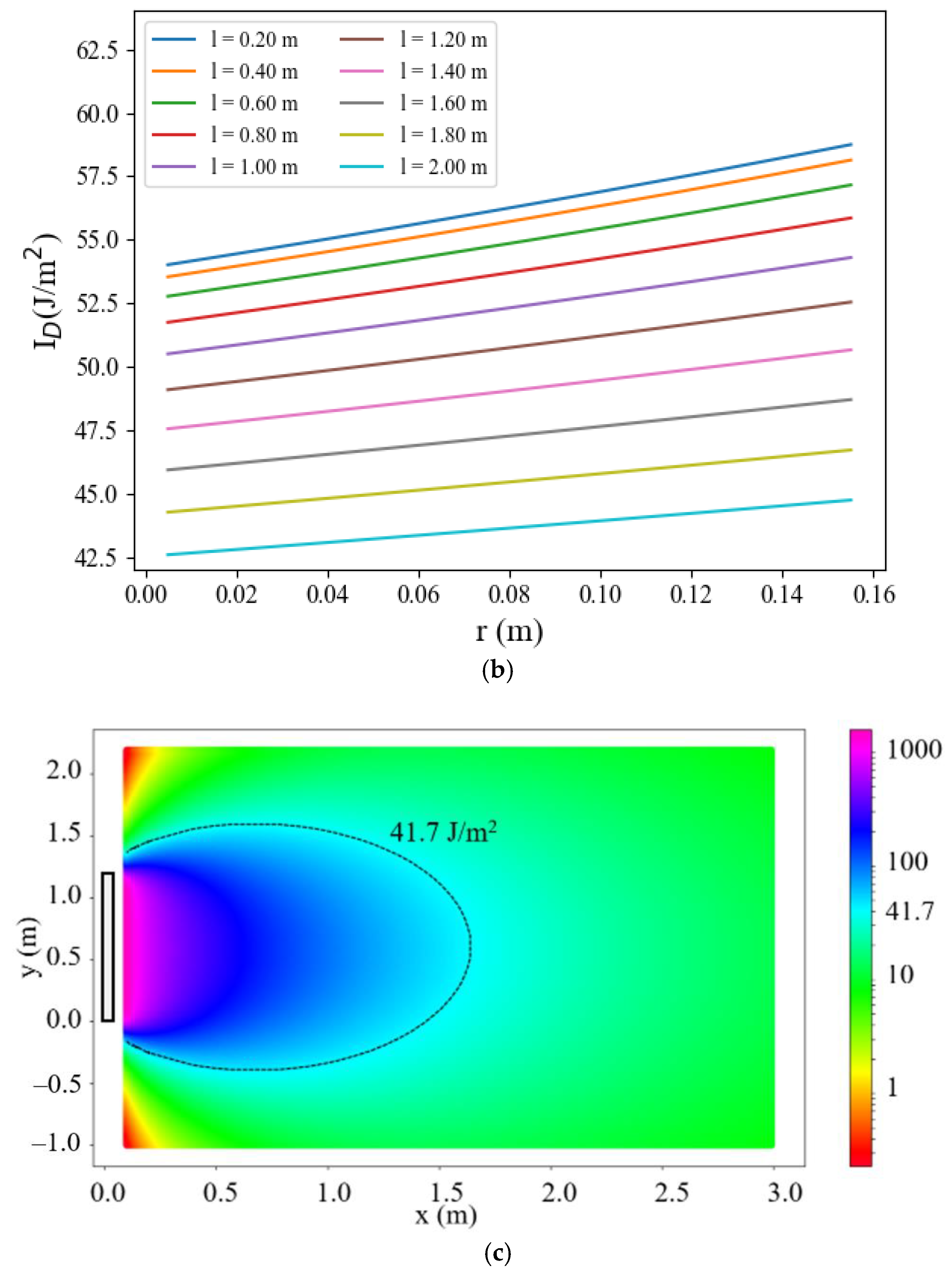
3. Disinfection System Using UVC Lamp
4. UWB Positioning System with TDOA Algorithm
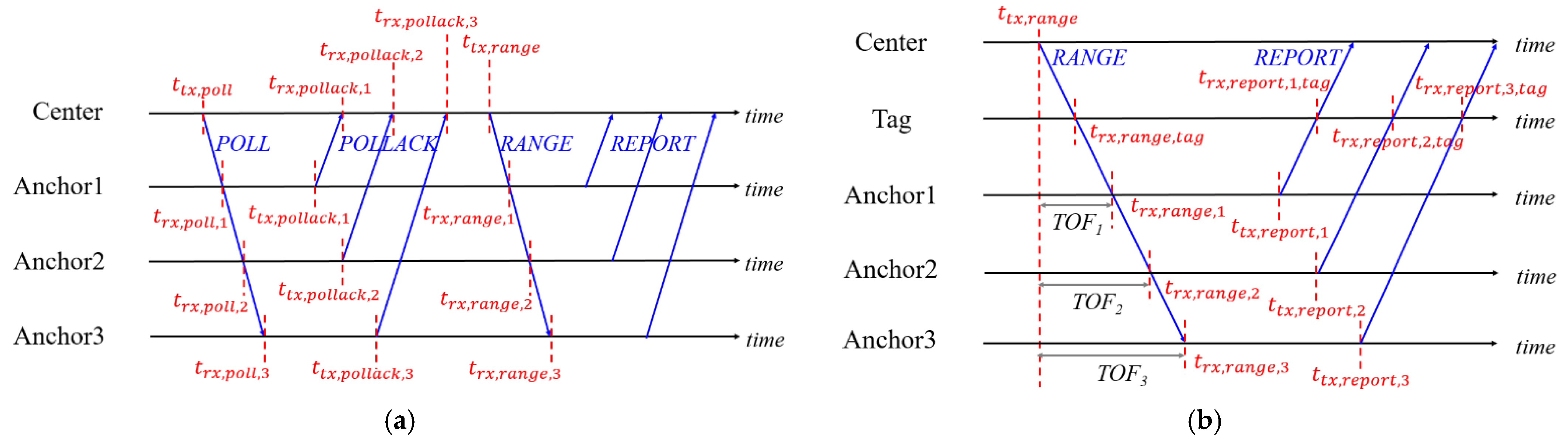
4.1. Modified TWR and Anchor Synchronization
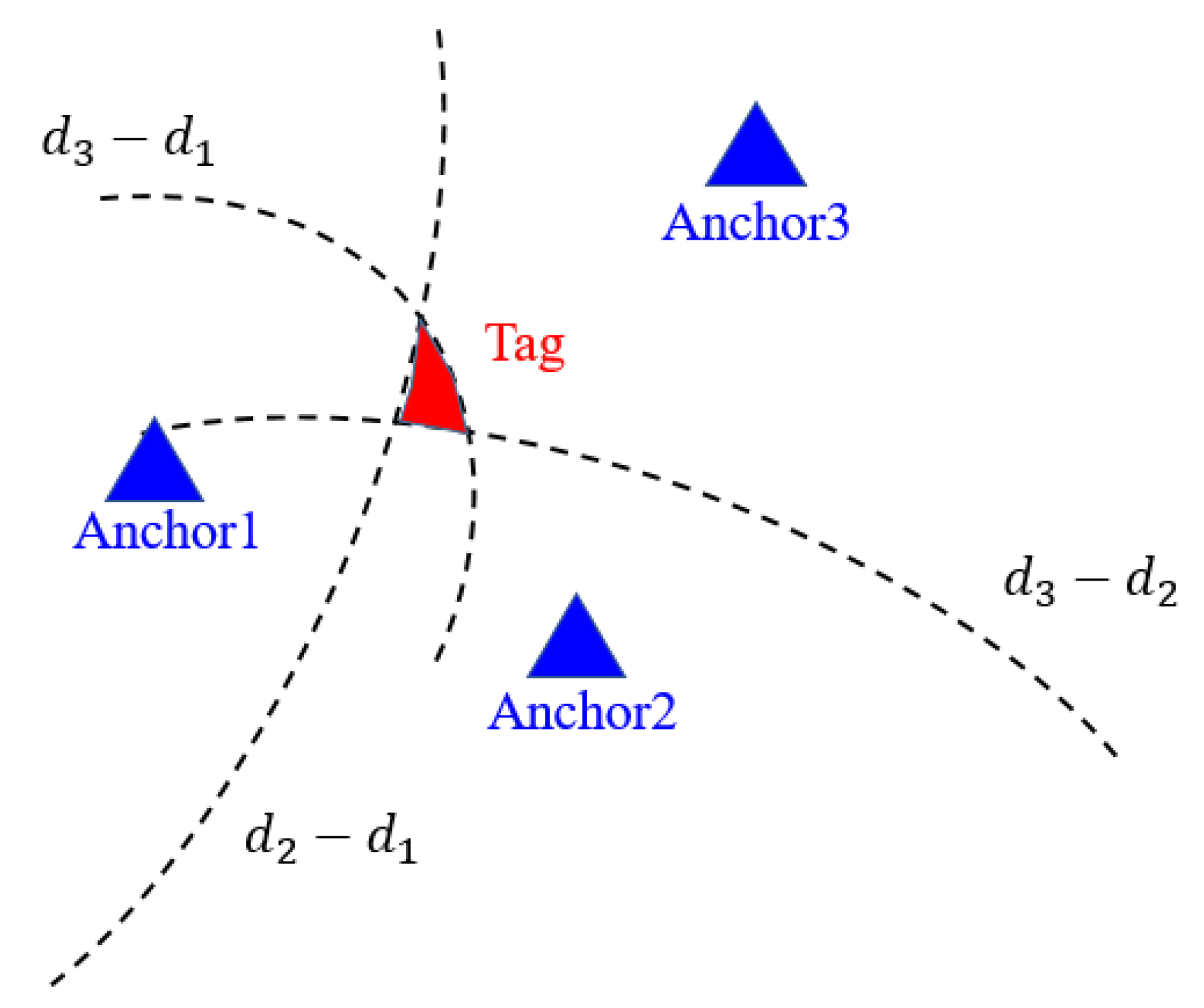
4.2. TDOA Positioning Algorithms
| Algorithm 1 Function GD-Taylor() | |
| Input | Locations of anchors (x1, y1), (x2, y2), …, (xn, yn) |
| Received timestamps t1, t2, …, tn | |
| Maximal iteration time max_iter | |
| Initial location (xinit, yinit) | |
| Output | Estimated location of tag (xt, yt) |
| 1 | Calculate d21, d31, …, dn1 by multiplying light speed and |
| time resolution to (t2 − t1), (t3 − t1), …, (tn − t1); | |
| 2 | Set weight to 10−10; |
| 3 | Set (x, y) to (xinit, yinit); |
| 4 | whiletimes < max_iter do |
| 5 | d1, d2, …, dn are the distances from anchors to (x, y); |
| 6 | use (8) and (11) to calculate δTaylor and δGD; |
| 7 | Set δGD-Taylor to (δTaylor + δGD); |
| 8 | Set weight to (weight + δGD-Taylor, x2 + δGD-Taylor, y2); |
| 9 | Set x to (x + δGD-Taylor, x /(weight)1/2); |
| 10 | Set y to (y + δGD-Taylor, y /(weight)1/2); |
| 11 | times++; |
| 12 | if ((δGD-Taylor, x2 + δGD-Taylor, y2)/weight)1/2 < 0.001 then |
| 13 | break |
| 14 | endif |
| 15 | endwhile |
| 16 | return (x, y) |
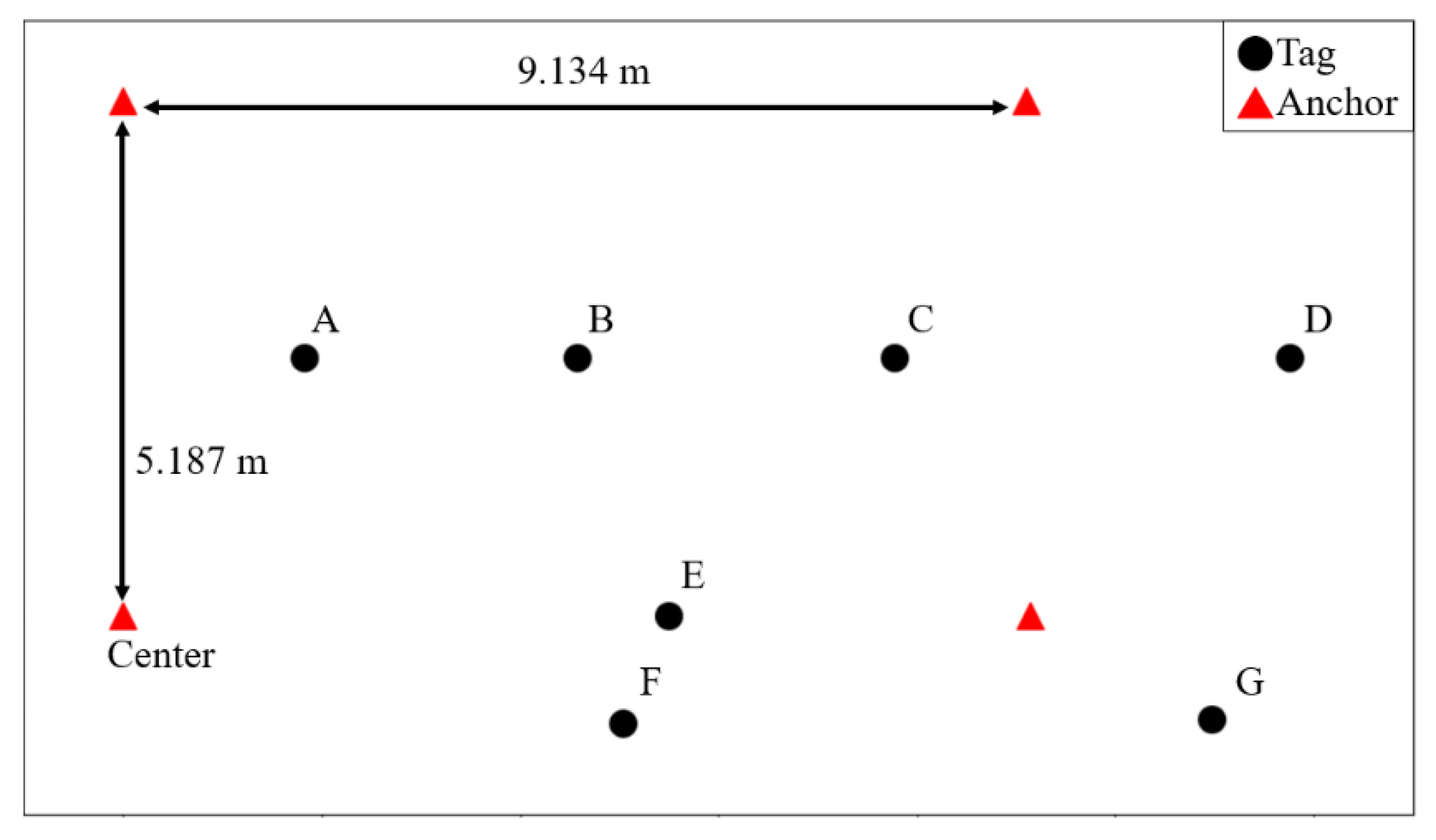
4.3. Simulation and Measurement
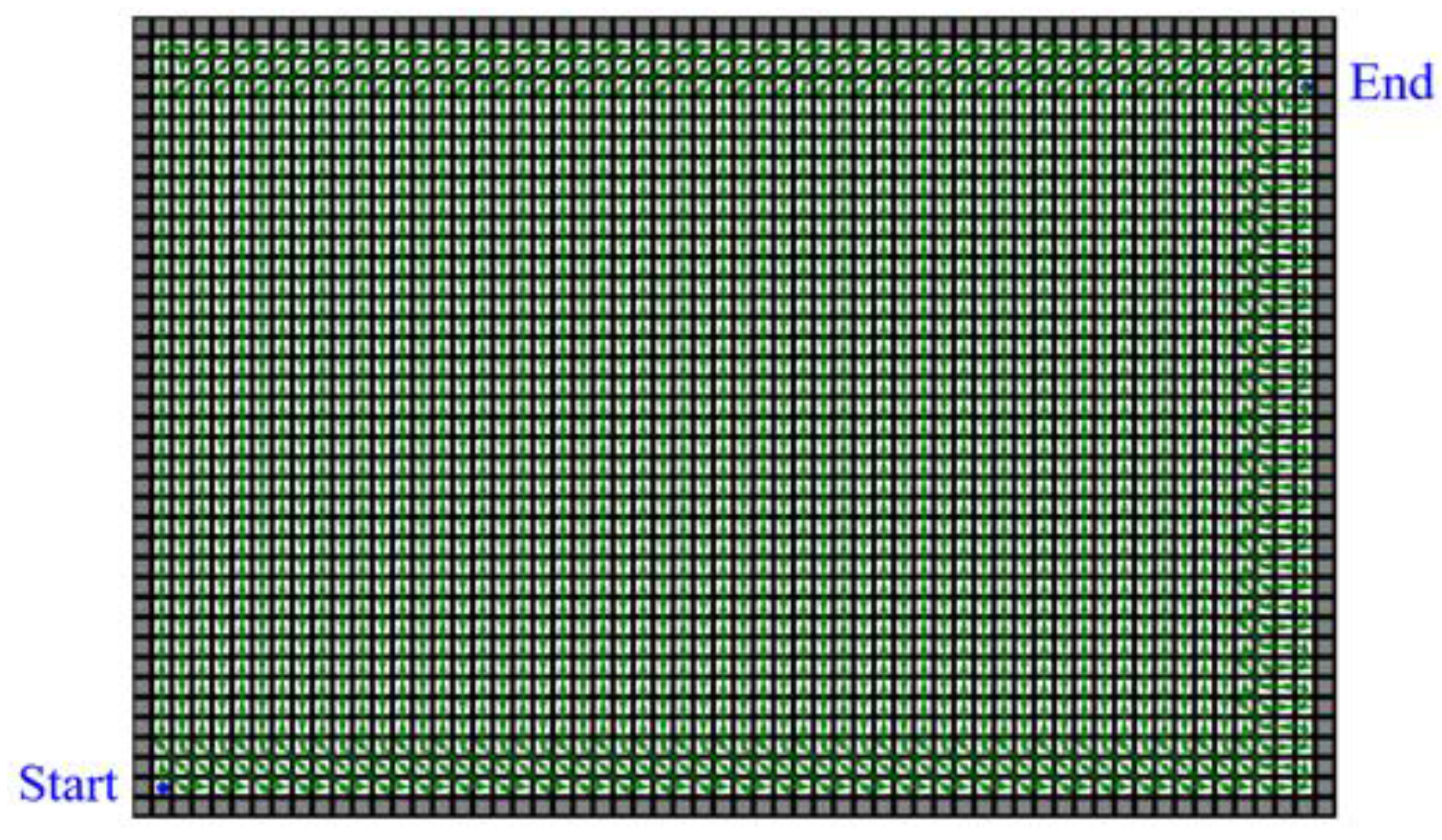
5. Traversal Path Planning Using Generalized Edge Searching Method
5.1. Edge Searching Method
| Algorithm 2 Function EdgeSearching(visiting_node) | |
| Input | The current trace visited_trace |
| The current node visiting_node | |
| Total number of target nodes total_length | |
| The length of solution solution_length | |
| Output | The trace of solution solution_trace |
| 1 | ifsolution_length is total_length then |
| 2 | return |
| 3 | endif |
| 4 | if (length of visited_trace) is total_length then |
| 5 | Set solution_length to (length of visited_trace); |
| 6 | returnvisited_trace |
| 7 | endif |
| 8 | Set min_value to 10; |
| 9 | for node in neighbors of visiting_node do |
| 10 | ifnode not visited and node.available < min_value then |
| 11 | Set min_value to node.available; |
| 12 | endif |
| 13 | endfor |
| 14 | for node in neighbors of visiting_node do |
| 15 | ifnode not visited and node.available is min_value then |
| 16 | Visit node and add node to visited_trace; |
| 17 | for neighbor_node in neighbors of node do |
| 18 | neighbor_node.available--; |
| 19 | endfor |
| 20 | EdgeSearching(node); |
| 21 | for neighbor_node in neighbors of node do |
| 22 | neighbor_node.available++; |
| 23 | endfor |
| 24 | Unvisit node and delete node in visited_trace; |
| 25 | end if |
| 26 | end for |
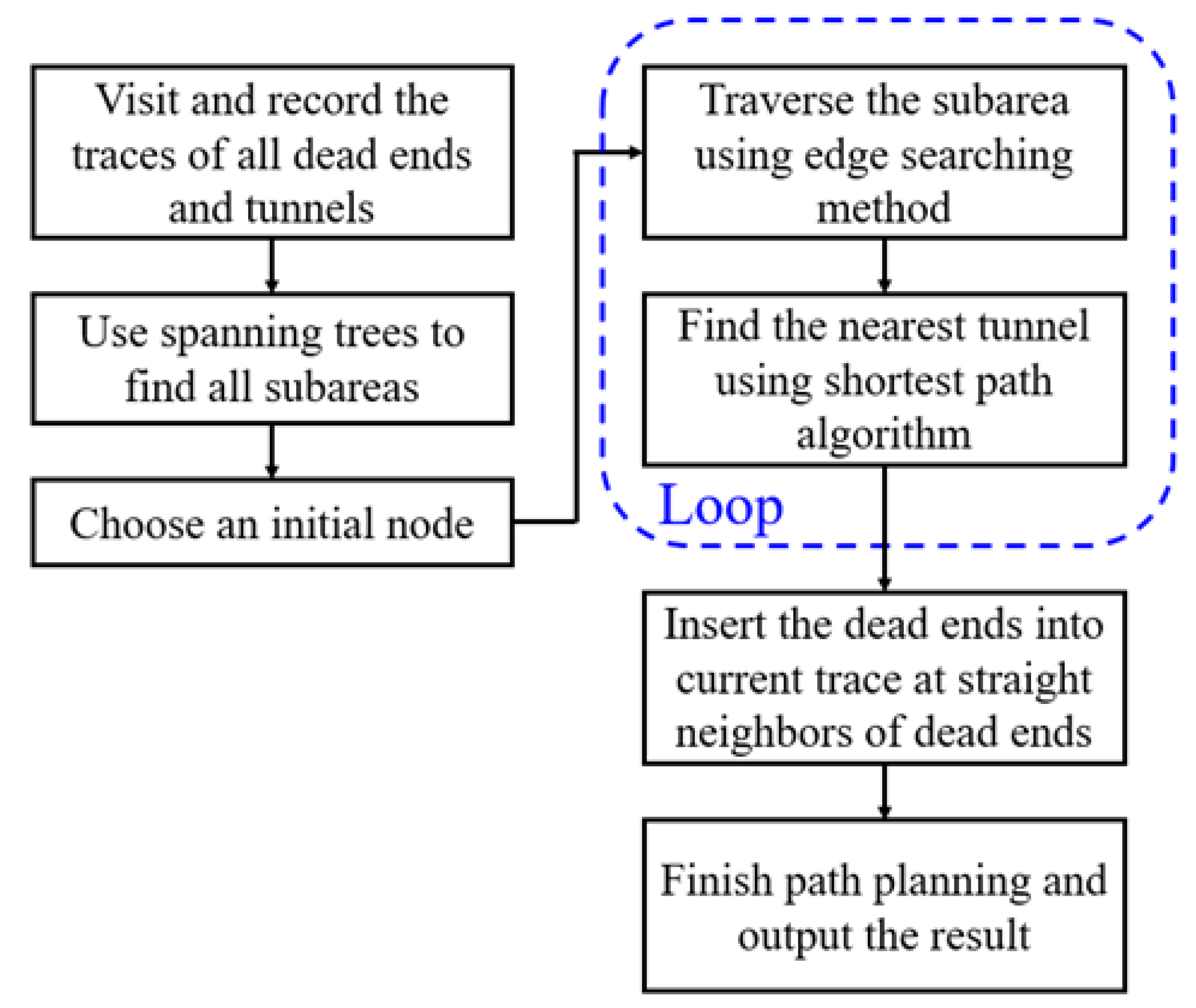
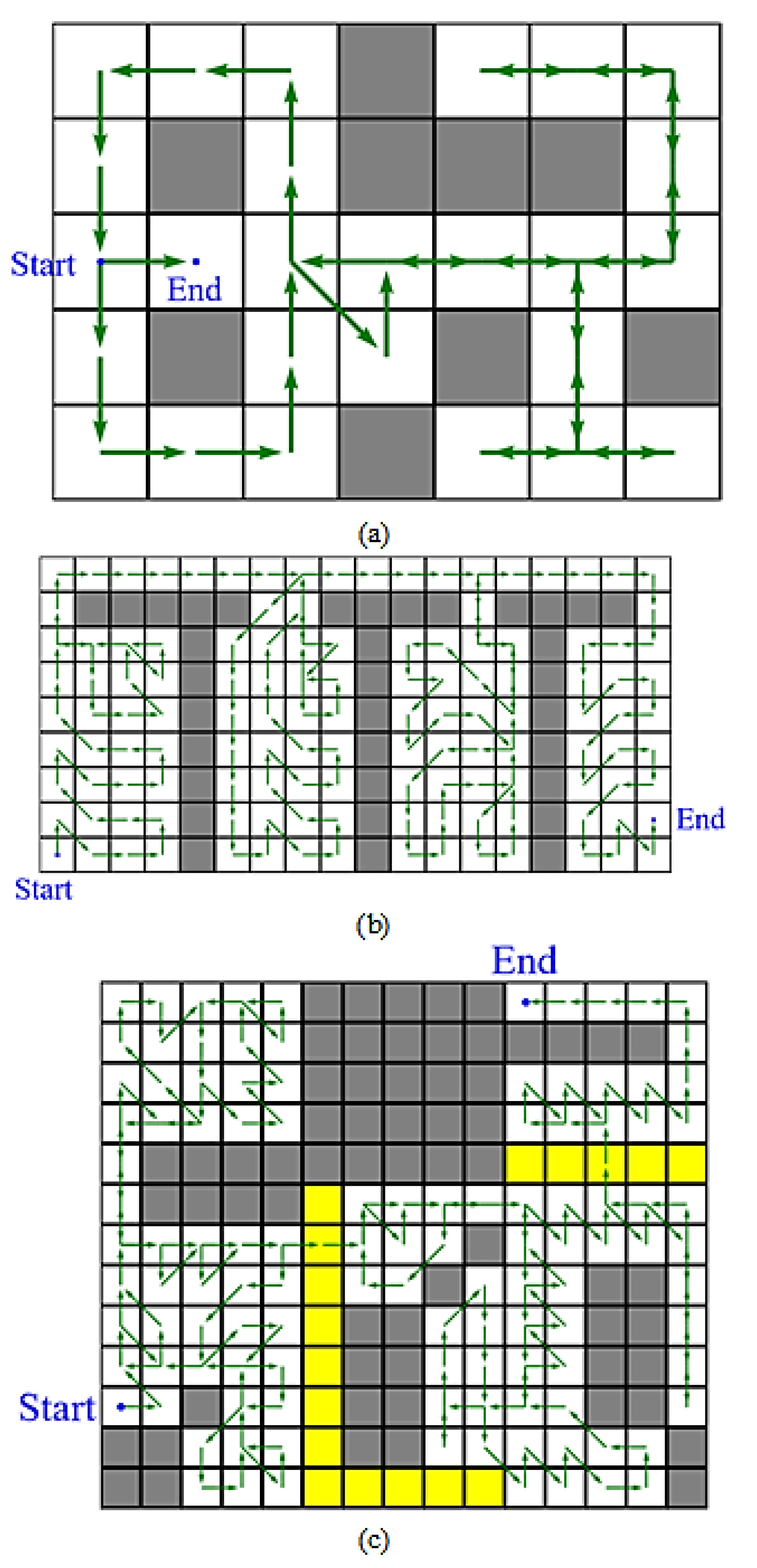
5.2. Generalized Traversal Path Planning
6. Demonstration
7. Discussion
7.1. Choice of Grid Size
7.2. Different Scenarios
7.3. Autonomous Vehicles for Different Surfaces
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mathebula, T.; Leuschner, F.W.; Chowdhury, S.P. The Use of UVC-LEDs for the Disinfection of Mycobacterium tuberculosis. In Proceedings of the 2018 IEEE PES/IAS PowerAfrica, Cape Town, South Africa, 26–29 June 2018; pp. 739–744. [Google Scholar]
- Georgakilas, A.G.; Konsta, A.A.; Sideris, E.G.; Sakelliou, L. Dielectric and UV spectrophotometric study of physico-chemical effects of ionizing radiation on mammalian macromolecular DNA. IEEE Trans. Dielectr. Electr. Insul. 2001, 8, 549–554. [Google Scholar] [CrossRef]
- Moe, C.G.; Chen, J.; Grandusky, J.R.; Mendrick, M.C.; Randive, R.; Rodak, L.E.; Sampath, A.V.; Wraback, M.; Schowalter, L.J. Pseudomorphic Mid-Ultraviolet Light-Emitting Diodes for Water Purification. In Conference on Lasers and Electro-Optics; The Optical Society: Washington, DC, USA, 2013; pp. 1–2. [Google Scholar]
- Arenas, L.D.O.; de Azevedo e Melo, G.; Canesin, C.A. Electronic Ballast Design for UV Lamps Based on UV Dose, Applied to Drinking Water Purifier. IEEE Trans. Ind. Electron. 2016, 63, 4816–4825. [Google Scholar]
- Azevedo, D.; Esteves, A.; Ribeiro, F.; Farinha, L.; Metrolho, J. A wearable device for monitoring health risks when children play outdoors. In Proceedings of the 2020 15th Iberian Conference on Information Systems and Technologies (CISTI), Seville, Spain, 24–27 June 2020; pp. 1–6. [Google Scholar]
- Leccese, F.; Salvadori, G.; Lista, D.; Burattini, C. Outdoor Workers Exposed to UV Radiation: Comparison of UV Index Forecasting Methods. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Minut, M.; Rosca, M.; Cozma, P.; Catrinescu, C.; Gavrilescu, M. Ecological and Human Health Risks Generated by Organic UV Filters. In Proceedings of the 2019 E-Health and Bioengineering Conference (EHB), Iasi, Romania, 21–23 November 2019; pp. 1–4. [Google Scholar]
- Chanprakon, P.; Sae-Oung, T.; Treebupachatsakul, T.; Hannanta-Anan, P.; Piyawattanametha, W. An Ultra-violet sterilization robot for disinfection. In Proceedings of the 2019 5th International Conference on Engineering, Applied Sciences and Technology (ICEAST), Luang Prabang, Laos, 2–5 July 2019; pp. 1–4. [Google Scholar]
- Bentancor, M.; Vidal, S. Programmable and low-cost ultraviolet room disinfection device. HardwareX 2018, 4, e00046. [Google Scholar] [CrossRef]
- Guangyong, Y.; Lin, C.; Shan, C. An error correction method with adaptive time slot for AGV’s magnet-induced marker sensor. In Proceedings of the 2016 International Conference on Computer, Information and Telecommunication Systems (CITS), Kunming, China, 6–8 August 2016; pp. 1–4. [Google Scholar]
- Guang, X.; Gao, Y.; Leung, H.; Liu, P.; Li, G. An Autonomous Vehicle Navigation System Based on Inertial and Visual Sensors. Sensors 2018, 18, 2952. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanchez-Hermosilla, J.; Gonzalez, R.; Rodríguez, F.; Donaire, J.G. Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations. Sensors 2013, 13, 769–784. [Google Scholar] [CrossRef]
- Zhao, J.; Huang, Y.; He, X.; Zhang, S.; Ye, C.; Feng, T.; Xiong, L. Visual Semantic Landmark-Based Robust Mapping and Localization for Autonomous Indoor Parking. Sensors 2019, 19, 161. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Zhu, X.; Liu, Y.; Liu, W. Construction of Hybrid Dual Radio Frequency RSSI (HDRF-RSSI) Fingerprint Database and Indoor Location Method. Sensors 2020, 20, 2981. [Google Scholar] [CrossRef]
- Sun, D.; Wei, E.; Ma, Z.; Wu, C.; Xu, S. Optimized CNNs to Indoor Localization through BLE Sensors Using Improved PSO. Sensors 2021, 21, 1995. [Google Scholar] [CrossRef] [PubMed]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Bieber, C.; Silverberg, L.; Sabatini, R. A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation. Sensors 2016, 16, 1637. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Gao, Y.; Li, Z.; Meng, X.; Hancock, C.M. A Tightly-Coupled GPS/INS/UWB Cooperative Positioning Sensors System Supported by V2I Communication. Sensors 2016, 16, 944. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Pu, J.; Sun, L.; He, Z. An Approach to Robust INS/UWB Integrated Positioning for Autonomous Indoor Mobile Robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Z.; Zhao, R.; Liu, E.; Yan, K.; Ma, Y. Scale Estimation and Correction of the Monocular Simultaneous Localization and Mapping (SLAM) Based on Fusion of 1D Laser Range Finder and Vision Data. Sensors 2018, 18, 1948. [Google Scholar] [CrossRef] [Green Version]
- Bavle, H.; De La Puente, P.; How, J.P.; Campoy, P. VPS-SLAM: Visual Planar Semantic SLAM for Aerial Robotic Systems. IEEE Access 2020, 8, 60704–60718. [Google Scholar] [CrossRef]
- Passafiume, M.; Maddio, S.; Cidronali, A. An Improved Approach for RSSI-Based only Calibration-Free Real-Time Indoor Localization on IEEE 802.11 and 802.15.4 Wireless Networks. Sensors 2017, 17, 717. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Xiu, C.; Zhang, X.; Yang, D. WiFi Indoor Localization with CSI Fingerprinting-Based Random Forest. Sensors 2018, 18, 2869. [Google Scholar] [CrossRef] [Green Version]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Sport Postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [Green Version]
- Khalaf-Allah, M. Particle Filtering for Three-Dimensional TDoA-Based Positioning Using Four Anchor Nodes. Sensors 2020, 20, 4516. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Huang, S.-P.; Wu, T.-W.; Tsai, W.-T.; Liou, C.-Y.; Mao, S.-G. UWB System for Indoor Positioning and Tracking with Arbitrary Target Orientation, Optimal Anchor Location, and Adaptive NLOS Mitigation. IEEE Trans. Veh. Technol. 2020, 69, 9304–9314. [Google Scholar] [CrossRef]
- Ezhumalai, B.; Song, M.; Park, K. An Efficient Indoor Positioning Method Based on Wi-Fi RSS Fingerprint and Classification Algorithm. Sensors 2021, 21, 3418. [Google Scholar] [CrossRef]
- Channel Effects on Communication Range and Time Stamp Accuracy in DW1000 Based Systems. Available online: https://www.decawave.com/wp-content/uploads/2018/10/APS006_Part-1-Channel-Effects-on-Range-Accuracy_v1.03.pdf (accessed on 31 July 2021).
- Khodjaev, J.; Park, Y.; Malik, A.S. Survey of NLOS identification and error mitigation problems in UWB-based positioning algorithms for dense environments. Ann. Telecommun. 2010, 65, 301–311. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. A UWB Channel Impulse Response De-Noising Method for NLOS/LOS Classifi-cation Boosting. IEEE Commun. Lett. 2020, 24, 2513–2517. [Google Scholar] [CrossRef]
- Decawave. DWM1000 Datasheet. Available online: https://www.decawave.com/dwm1000/datasheet/ (accessed on 31 July 2021).
- Peng, C.; Isler, V. Visual Coverage Path Planning for Urban Environments. IEEE Robot. Autom. Lett. 2020, 5, 5961–5968. [Google Scholar] [CrossRef]
- Daoqing, Z.; Mingyan, J. Parallel discrete lion swarm optimization algorithm for solving traveling salesman problem. J. Syst. Eng. Electron. 2020, 31, 751–760. [Google Scholar] [CrossRef]
- Liu, Y.; Tian, M.; Wang, X.; Lv, J. Study on Path Planning of Intelligent Mower Based on UWB Location. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Korea, 1–3 November 2019; pp. 248–253. [Google Scholar]
- Guo, H.; Wu, X.; Fu, R.; Feng, W. Robust localization system for an autonomous mower. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–8 December 2015; pp. 2580–2584. [Google Scholar]
- Ruan, K.; Wu, Z.; Xu, Q. Smart Cleaner: A New Autonomous Indoor Disinfection Robot for Combating the COVID-19 Pandemic. Robotics 2021, 10, 87. [Google Scholar] [CrossRef]
- Zhao, K.; Zhao, T.; Zheng, Z.; Yu, C.; Ma, D.; Rabie, K.; Kharel, R. Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors 2020, 20, 6513. [Google Scholar] [CrossRef]
- Nagdeo, J.V. Synchronization of Anchors in a TDoA Based Ultra-Wide Band Localization System. Master’s Thesis, University of Technology, Eindhoven, The Netherlands, 2018. Available online: https://research.tue.nl/en/studentTheses/synchronization-of-anchors-in-a-tdoa-based-ultra-wide-band-locali (accessed on 31 July 2021).
- Kowalski, W.J.; Walsh, T.J.; Petraitis, V. 2020 COVID-19 Coronavirus Ultraviolet Susceptibility; Technical Report COVID-19_UV_V20200312; PurpleSun Inc.: Long Island City, NY, USA, 2020. [Google Scholar]
- Buonanno, M.; Welch, D.; Shuryak, I.; Brenner, D.J. Far-UVC light (222 nm) efficiently and safely inactivates airborne human coronaviruses. Sci. Rep. 2020, 10, 10285. [Google Scholar] [CrossRef] [PubMed]
- Modest, M. Radiative Heat Transfer, 3rd ed.; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Yang, K.; An, J.; Bu, X.; Sun, G. Constrained Total Least-Squares Location Algorithm Using Time-Difference-of-Arrival Measurements. IEEE Trans. Veh. Technol. 2010, 59, 1558–1562. [Google Scholar] [CrossRef]
- Li, A.; Luan, F. An Improved Localization Algorithm Based on CHAN with High Positioning Accuracy in NLOS-WGN Environment. In Proceedings of the 2018 10th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 25–26 August 2018; Volume 1, pp. 332–335. [Google Scholar]
- Cheng, Y.; Zhou, T. UWB Indoor Positioning Algorithm Based on TDOA Technology. In Proceedings of the 2019 10th International Conference on Information Technology in Medicine and Education (ITME), Qingdao, China, 23–25 August 2019; pp. 777–782. [Google Scholar]
- Li, L.; Liu, Z. Analysis of TDOA Algorithm about Rapid Moving Target with UWB Tag. In Proceedings of the 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2017; Volume 1, pp. 406–409. [Google Scholar]
- Baidoo-Williams, H.E.; Dasgupta, S.; Mudumbai, R.; Bai, E. On the Gradient Descent Localization of Radioactive Sources. IEEE Signal Process. Lett. 2013, 20, 1046–1049. [Google Scholar] [CrossRef]
- Yağmur, N.; Alagöz, B.B. Comparision of Solutions of Numerical Gradient Descent Method and Continous Time Gradient Descent Dynamics and Lyapunov Stability. In Proceedings of the 2019 27th Signal Processing and Communications Applications Conference (SIU), Sivas, Turkey, 24–26 April 2019; pp. 1–4. [Google Scholar]
- Zhang, A.; Lipton, Z.; Li, M.; Smola, A. Dive Into Deep Learning. Available online: http://www.d2l.ai (accessed on 31 July 2021).
- Yanqiong, F.; Qiuxuan, W.; Yuhang, Z. Study on climbing slope of wheel-track hybrid mobile robot. In Proceedings of the 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–5. [Google Scholar]
- Zhang, S.; Yao, J.-T.; Wang, Y.-B.; Liu, Z.-S.; Xu, Y.-D.; Zhao, Y.-S. Design and motion analysis of reconfigurable wheel-legged mobile robot. Def. Technol. 2021. (In Press, Corrected Proof). [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Average Accuracy (cm) | Supported AMR Quantity | Update Rate (Hz) |
|---|---|---|---|
| This work | 28.7 | infinite | 50 |
| [37] | 36.0 | 1170 | 5 |
| [36] | 55.2 (no calibration) 12.6 (with calibration) | 1000 | 32 |
| Tag | LS | Chan | Taylor | GD | GD-Taylor |
|---|---|---|---|---|---|
| A | 111.963 | 9.699 | 0.114 | 0.118 | 0.118 |
| B | 0.164 | 0.748 | 0.136 | 0.149 | 0.147 |
| C | 127.223 | 8.051 | 3.723E + 17 | 0.131 | 0.130 |
| D | 45.700 | 5.614 | 4.914E + 08 | 0.506 | 0.452 |
| E | 185.042 | 0.187 | 0.162 | 0.173 | 0.171 |
| F | 66.120 | 3.658 | 0.211 | 0.220 | 0.218 |
| G | 0.924 | 2.182 | 0.797 | 0.808 | 0.773 |
| Average | 76.691 | 4.305 | 5.318E + 16 | 0.300 | 0.287 |
| Tag | LS | Chan | Taylor | GD | GD-Taylor |
|---|---|---|---|---|---|
| A | 15.952 | 8.881 | 0.183 | 0.167 | 0.168 |
| B | 2.245 | 0.701 | 0.132 | 0.123 | 0.124 |
| C | 10.648 | 3.602 | 6.654E + 07 | 0.134 | 0.131 |
| D | 15.990 | 4.036 | 4.560E + 17 | 0.483 | 0.277 |
| E | 2.414 | 0.148 | 0.168 | 0.159 | 0.161 |
| F | 133.374 | 4.844 | 0.343 | 0.338 | 0.339 |
| G | 0.805 | 1.969 | 0.611 | 0.594 | 0.601 |
| Average | 25.867 | 3.454 | 6.645E + 16 | 0.279 | 0.257 |
| LS | Chan | Taylor | GD | GD-Taylor | |
|---|---|---|---|---|---|
| Average Calculating Time | 0.0868 | 0.6141 | 0.4129 | 12.4678 | 3.1685 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.-P.; Neo, J.-F.; Chen, Y.-Y.; Chen, C.-B.; Wu, T.-W.; Peng, Z.-A.; Tsai, W.-T.; Liou, C.-Y.; Sheng, W.-H.; Mao, S.-G. Ultra-Wideband Positioning Sensor with Application to an Autonomous Ultraviolet-C Disinfection Vehicle. Sensors 2021, 21, 5223. https://doi.org/10.3390/s21155223
Huang S-P, Neo J-F, Chen Y-Y, Chen C-B, Wu T-W, Peng Z-A, Tsai W-T, Liou C-Y, Sheng W-H, Mao S-G. Ultra-Wideband Positioning Sensor with Application to an Autonomous Ultraviolet-C Disinfection Vehicle. Sensors. 2021; 21(15):5223. https://doi.org/10.3390/s21155223
Chicago/Turabian StyleHuang, Shih-Ping, Jin-Feng Neo, Yu-Yao Chen, Chien-Bang Chen, Ting-Wei Wu, Zheng-An Peng, Wei-Ting Tsai, Chong-Yi Liou, Wang-Huei Sheng, and Shau-Gang Mao. 2021. "Ultra-Wideband Positioning Sensor with Application to an Autonomous Ultraviolet-C Disinfection Vehicle" Sensors 21, no. 15: 5223. https://doi.org/10.3390/s21155223