1. Introduction
In synthetic aperture radar (SAR) imaging, circular flight path surveys produce 2D images with very high resolution as data are collected over 360° around the imaged area. Circular SAR can also provide 3D scattering information, but the 3D images are deformed by strong cone-shaped sidelobes [
1,
2,
3]. Multicircular SAR, or holographic SAR tomography (HoloSAR), creates another synthetic aperture in elevation that mitigates these undesirable sidelobes, thus providing complete 3D data reconstruction with very high resolution [
4,
5,
6,
7,
8,
9]. HoloSAR geometry acquisition consists of multiple circular flight paths at different fixed heights. The sparse nature of the elevation aperture in HoloSAR poses some difficulties for a system working in the THz band [
10]. These issues are overcome with a cylindrical spiral flight pattern with constant vertical speed.
SAR image processing requires efficient algorithms in terms of both accuracy and processing time. Frequency-domain algorithms are fast, but they perform better when the flight path is linear and free of motion errors. The time-domain back-projection (BP) algorithm can process SAR data for any flight path with high focusing quality but with high computational costs. Fast factorized back-projection (FFBP) algorithms can significantly reduce the computational time while still maintaining the accuracy of the BP algorithm. However, the increase in the level of sophistication makes it difficult to formulate an FFBP algorithm for arbitrary trajectories. As a result, many FFBP algorithms either assume a linear flight path to simplify calculations [
11,
12,
13,
14,
15,
16] or are tailored for circular flight paths [
2,
17,
18,
19].
In [
20], the authors proposed an FFBP algorithm that describes subapertures through a data mapping approach that does not depend on the flight path geometry, even though the algorithm assumes that the radar constantly illuminates the imaged area or volume. Moreover, the algorithm operates in cartesian coordinates and employs a flexible tree structure that can handle both 2D and 3D data.
For the HoloSAR presented by Ponce et al. [
4], different image layers were processed with a 2D FFBP that is customized for circular trajectories [
2]. Ponce et al. did not pursue 3D focusing with their FFBP due to practical reasons [
4]. Other HoloSAR solutions have used the direct BP algorithm [
6,
8], sparse reconstruction models [
4,
5,
7], adaptive imaging [
6,
9], or a combination of them. Apart from the choice in the algorithm, there are two common approaches:
Process each circular flight independently and merge the outputs [
4,
6];
Make radial slices of the cylindrical synthetic aperture, process them separately, and then combine the results [
5,
7,
8,
9].
For the spiral SAR presented in [
10], the whole trajectory was processed with the direct BP algorithm. In [
20], the initial version of our FFBP algorithm successfully processed simulated SAR data of a spiral trajectory. To the best of our knowledge, it was the first full 3D FFBP algorithm capable of processing nonlinear SAR data.
Although the preliminary version of the FFBP algorithm [
20] is fully functional, it has proven inefficient when operating with real SAR data, both in processing time and memory consumption. Therefore, this paper presents a more consolidated version of the FFBP algorithm [
21] that employs vectorized variables and parallel processing to mitigate these issues. Vectorization is essential for increasing efficiency, while parallel computing further decreases processing time and reduces memory consumption.
Processing SAR data with an FFBP algorithm is not as straightforward as with a BP algorithm because some FFBP input parameters can affect the quality of the output image. Thankfully, Ulander et al. [
12] provided an error analysis that yielded a method to limit the phase error by controlling the processing setup.
This paper proposes a statistical phase error analysis inspired by [
12] but with a key difference. Because the FFBP algorithm presented here works well with curved flight paths, the proposed analysis does not consider that deviations from a linear flight path will deteriorate the phase error.
The purpose was to test the hypothesis that geometric parameters at the beginning of processing can predict the phase error standard deviation of the output image. The data set for testing this hypothesis comprised processing results for a spiral flight path performed by a multiband drone-borne SAR system [
22,
23]. The collected P-band SAR data were processed with the BP and FFBP algorithms to produce 2D and 3D images. Different parameters were chosen for the FFBP to alter the response in phase error and processing time.
The other sections of the paper are structured as follows.
Section 2 presents the FFBP algorithm, the phase error hypothesis, and the case study.
Section 3 evaluates several 2D and 3D SAR images regarding the phase error versus the signal-to-noise ratio (SNR), geometric parameters, and processing time. Finally, discussion of the results is presented in
Section 4 and the conclusion in
Section 5.
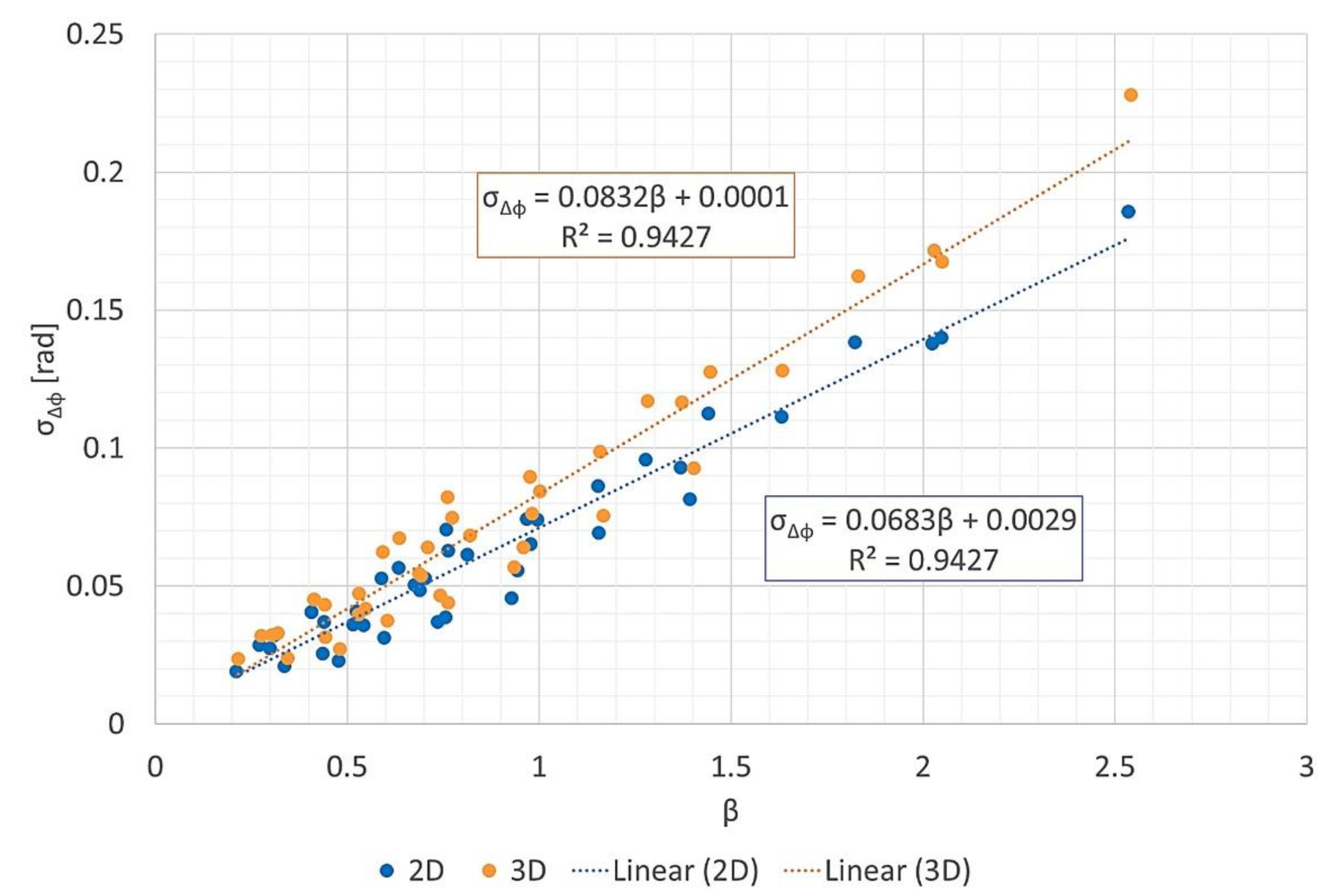
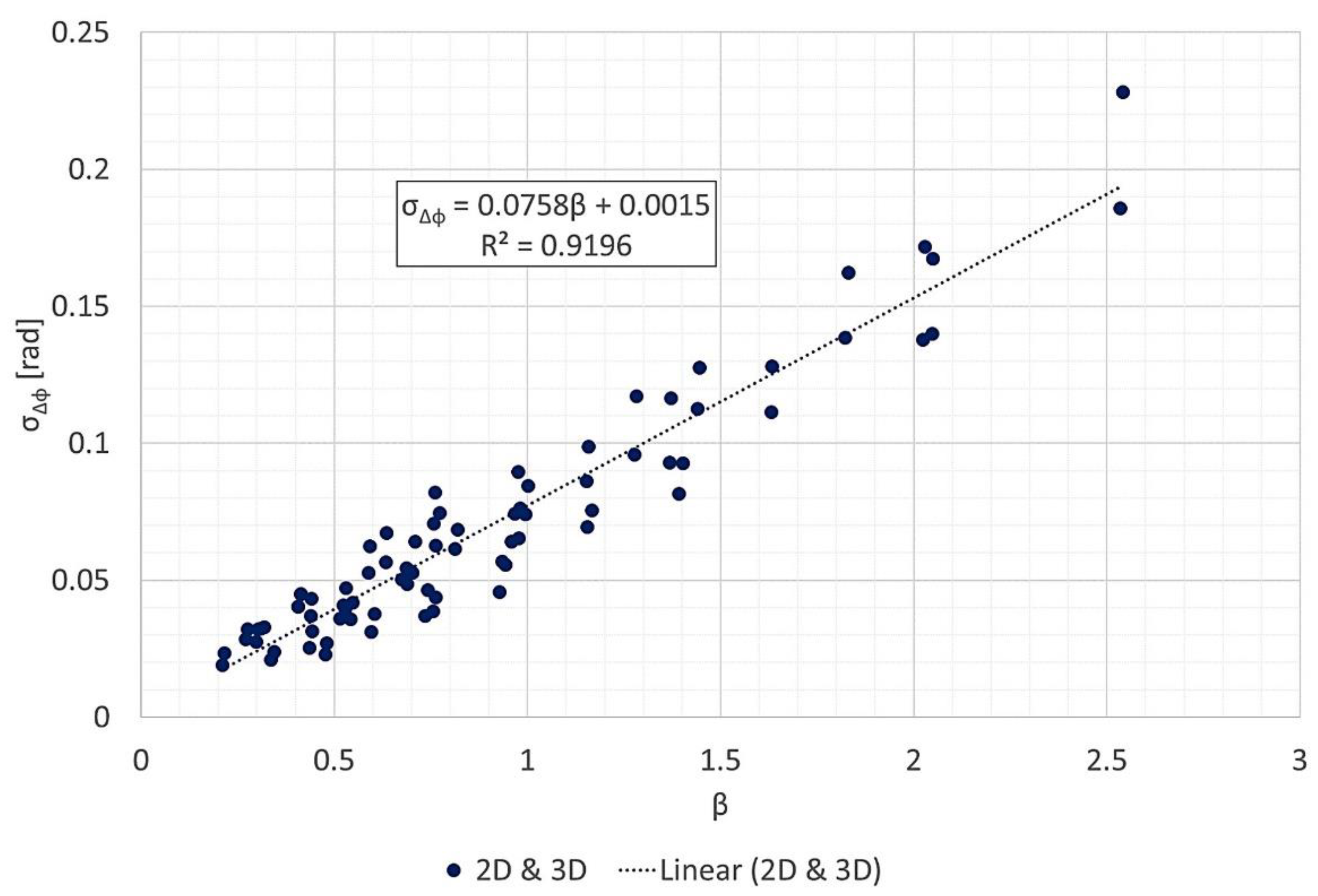
4. Discussion
The hypothesis that the geometric parameters at the first iteration can predict the phase error standard deviation at the output was validated for the P-band data. It was also validated when joining the 2D and 3D data sets (
Figure 16), reinforcing the idea that what matters most for this FFBP algorithm is the diagonal of the subimages, not their width. In
Section 3.3, all linear regression models produced slopes with negligible
p-values, statistically irrelevant intercepts, and
0.9.
This hypothesis was inspired by the range error analysis presented in [
12] but disregarding the effect of any deviations from a linear flight path. The reason is that the phase compensation term (10) ensures good focusing quality for nonlinear flight patterns. This term was proposed by Zhang et al. [
13] but with a different goal, namely to avoid taking range samples at each recursion in order to accelerate processing.
If (10) was removed from the FFBP algorithm, the outcome of the case study presented here would be completely unsatisfactory. Indeed,
Figure 19 shows the resultant 2D image with
2 and a (24 × 12 × 1) initial partition, i.e., the configuration with the lowest phase error standard deviation in
Section 3.4. If
Figure 19 is compared to the BP output image of
Figure 11, the degree of coherence is a meager 0.12.
According to the method for controlling the phase error proposed in [
12] (and briefly described in
Section 2.2), the partition scheme should attempt to keep the product of the subimage diagonal by the subaperture length constant across all iterations. This was possible in the processing of the 2D images but not for the 3D images. The reason is that the number of voxels in the
x- and
y-directions are significantly larger than in the
z-direction. Therefore, in some setups, the volumetric images were only split across the
x- and
y-directions for the last iterations. Consequently, the linear regression of the 3D image data set had a slightly steeper slope than that of the 2D data set.
In the future, this methodology should be repeated for other frequencies as the phase error also depends on the radar wavenumber. The linear regression models can be used to determine processing parameters from a requirement in phase error, which would be more accessible for other users to benefit from the FFBP algorithm.
As expected, the configuration with the lowest image quality (see
Figure 10 and
Figure 12) had the longest subaperture length and subimage diagonal, i.e.,
5 with an (8 × 4 × 1) initial partition. Likewise, the configuration with the highest image quality had the shortest subaperture length and subimage diagonal, i.e.,
2 with a (24 × 12 × 1) initial partition.
Table 6 lists some figures of merit at these extremes for the 2D and 3D data sets, namely the phase error standard deviation, the degree of coherence, and an SNR of equivalent thermal noise, calculated according to [
26]. SNR of equivalent thermal noise can be understood as the signal-to-thermal noise ratio that would result in an interferometric image with the same degree of coherence.
Table 6 also shows the values for an average image quality, which corresponds to the following configurations:
It is important to note that the term “lowest quality” refers to a relative comparison within the data set, not to poor quality in absolute terms. Qualitatively,
Figure 10 and
Figure 12 appear to be almost identical to
Figure 9 and
Figure 11, which may well indicate that this level of image quality is suitable for SAR processing. Indeed, in [
23], the same drone-borne SAR system produced a high-accuracy forest inventory with SAR interferometry in the P-band. A 5% accuracy was possible thanks to the forest SNR being higher than 17 dB. Because the SNR of equivalent noise was more than 20 dB, the configurations with the lowest image quality were already satisfactory. Moreover, they were also associated with the fastest processing times (see
Table 5), with speed-up factors of 13 and 21 for 2D and 3D images, respectively.
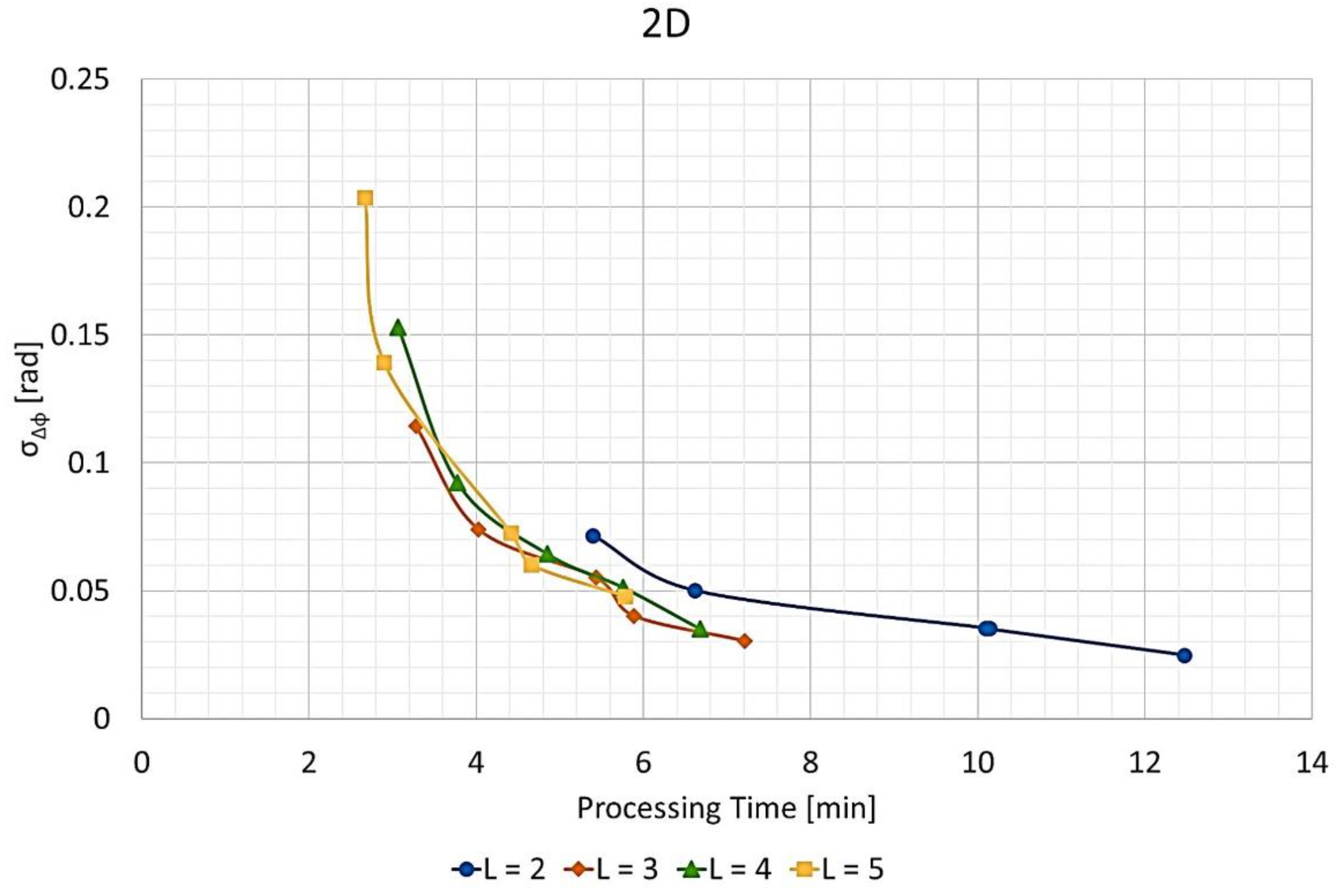
On the other hand, the configurations with the highest image quality had unnecessarily slow processing times. If a specific application would require an SNR higher than 20 dB, then a configuration with average image quality could be employed. The average phase error standard deviation points were close to those with average processing time in
Figure 17 and
Figure 18. Therefore, more demanding applications could benefit from a speed-up factor of about 6 for 2D images and 10 for 3D images.
Figure 9,
Figure 10,
Figure 11 and
Figure 12 show processed images from data acquired with a spiral flight path. As can be seen, the trees on the eucalyptus plantation are easily recognized. If the same area was surveyed with a linear flight pattern, the resultant image would have a slant range resolution of 3 m and an azimuth resolution of 50 cm [
23]. However, thanks to the 360° acquisition, the resolution across all directions in the (
x,
y) plane was at least 50 cm. The maximum attainable resolution in the (
x,
y) plane would be
[
1,
2,
3].
Unsurprisingly, the speed-up factor was higher for 3D images than for 2D images.
Section 2.1 pointed out that FFBP algorithms can reduce the computational cost from
to
. Therefore, the expected speed-up factor
would increase with the size of the output image.
It was noted in
Section 3.4 that the function for creating the partition scheme needs improvement. Moreover, the current version of the algorithm assumes that the radar is constantly illuminating the imaged area. In future works, this assumption should no longer be required. Finally, a bistatic version of the algorithm should be implemented as well.
5. Conclusions
Spiral and multicircular SAR acquisition techniques can produce high-resolution 3D SAR images. In [
20], the authors presented an FFBP algorithm capable of processing simulated SAR data replicating a spiral flight path. In the present work, an improved version of the FFBP algorithm [
21] could successfully process real P-band SAR data acquired by a drone-borne SAR system that performed a spiral flight pattern.
This paper proposes a statistical phase error analysis to determine how the FFBP setup affects the quality of the output images. In the case study, the same raw radar data were processed with the FFBP algorithm with different parameters to produce several 2D and 3D SAR images. The analysis validates the hypothesis that geometric parameters defined at the beginning of processing can predict the phase error standard deviation at the output. In future works, the linear regression models generated in the analysis could be applied to determine the processing setup from a requirement in phase error.
The FFBP algorithm produces nearly identical images to those processed with a direct BP algorithm, only faster. The speed-up factor is up to 21 times for the 3D images and 13 times for 2D images, with a phase error standard deviation of ~12°, corresponding to an SNR of equivalent thermal noise of 20 dB. For higher image quality, with a phase error standard deviation of ~4° and 30 dB SNR of equivalent thermal noise, the speed-up factor is 10 and 6 times for the 3D and 2D images, respectively.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}