
Secure and Efficient High Throughput Medium Access Control for Vehicular Ad-Hoc Network


 ,
,
Abstract
:1. Introduction
- cryptography technique with commutative key helps maintain message integrity and privacy.
- Our proposed scheme minimizes the computational overheads associated with preserving the privacy of the model (namely key computation, exchange, and distribution using external entities).
- The model preserves or protects the privacy information in the presence of untrusted or dishonest authorities.
- Compared with the existing design, the provision of our design has a much lower security overhead.
- The result obtained shows that the suggested design minimizes collision and maximizes system throughput.
2. Literature Review
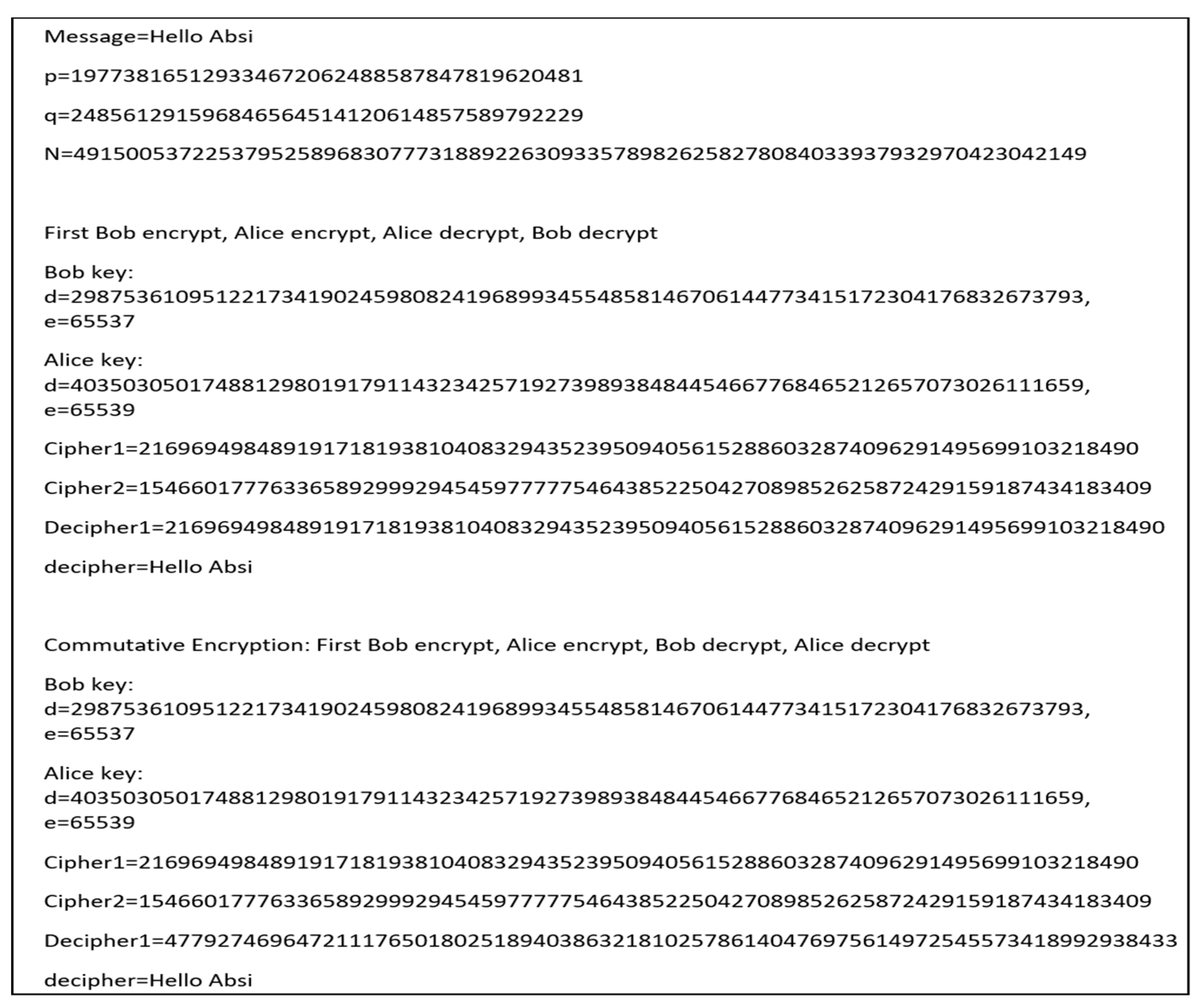
3. Secure VANET Communication (SVC) Using Commutative RSA Technique
- (a)
- Non-shared channel allocation :
- (b)
- Shared channel allocation :
- (c)
- with commutative key:
- (d)
- Proof of commutative RSA model:
- Key setup:
- (a)
- The same values of A and B are considered in all distributed by the key management center.
- (b)
- L and M are calculated at each node.
- (c)
- Using random number generator encryption parameter and decryption parameters .
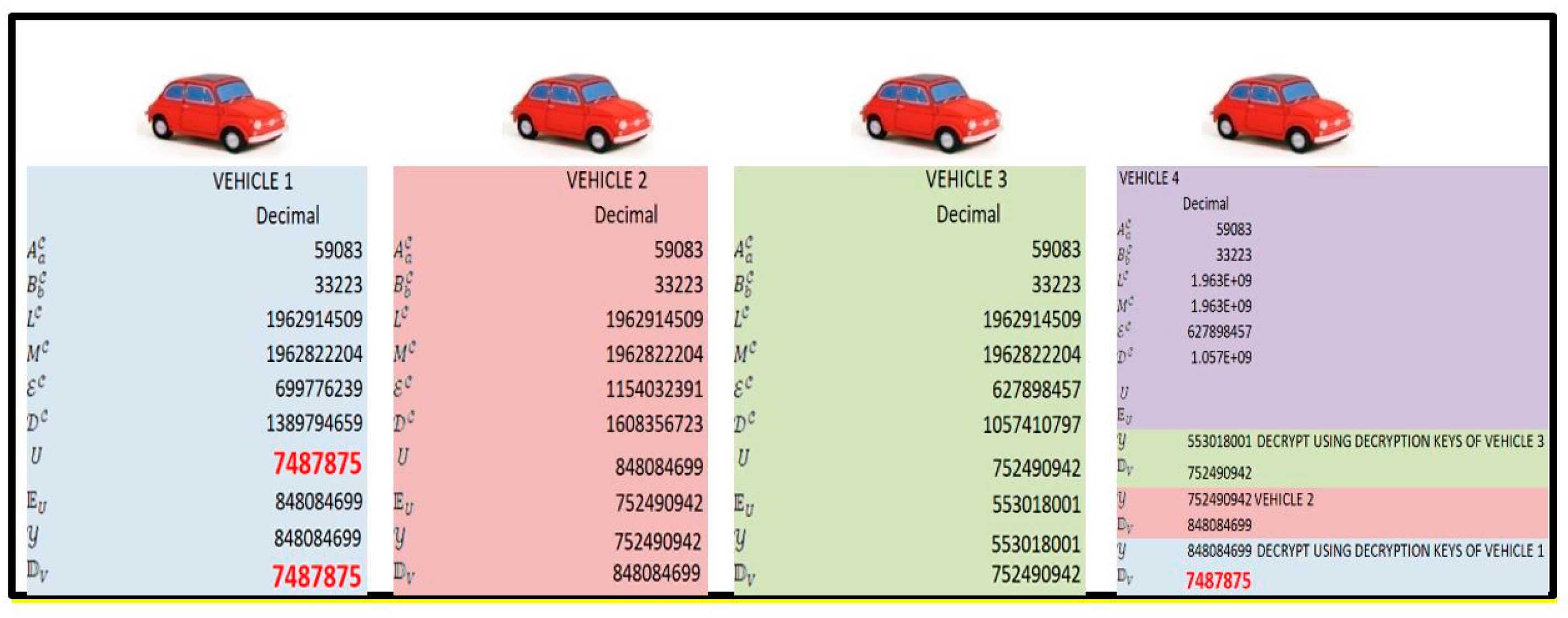
- Key exchange:
- (a)
- Vehicle 1 is the source, and vehicle 4 is the destination.
- (b)
- Vehicle 4 will get decryption keys of vehicle 1, 2, and 3 (Vehicle 1 (1962914509,1389794659), Vehicle 2 (1962914509,1608356723), Vehicle 3 (1962914509,1057410797)).
- Secure data exchange (no original data are exposed/revealed):
- (a)
- Vehicle 1 will encrypt the data and send them to 2.
- (b)
- Vehicle 2 will encrypt data and send them to 3.
- (c)
- Vehicle 3 will encrypt the data and send them to 4.
- (d)
- Vehicle 4 will decrypt the data using keys of vehicles 3, 2, and 1 to get the original data.
- (e)
- Computation of contention window:
- (f)
- Computation of Mac overhead:
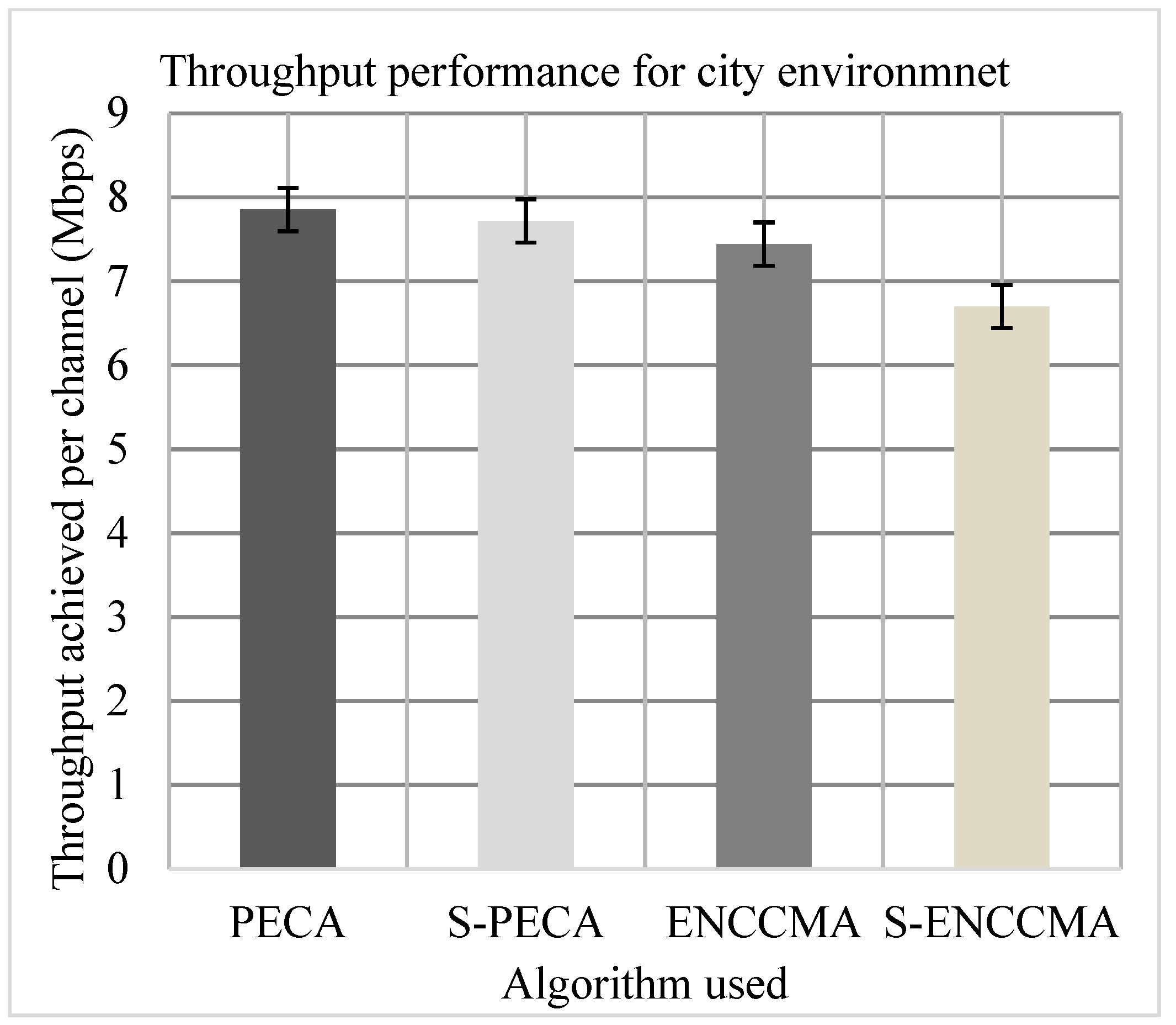
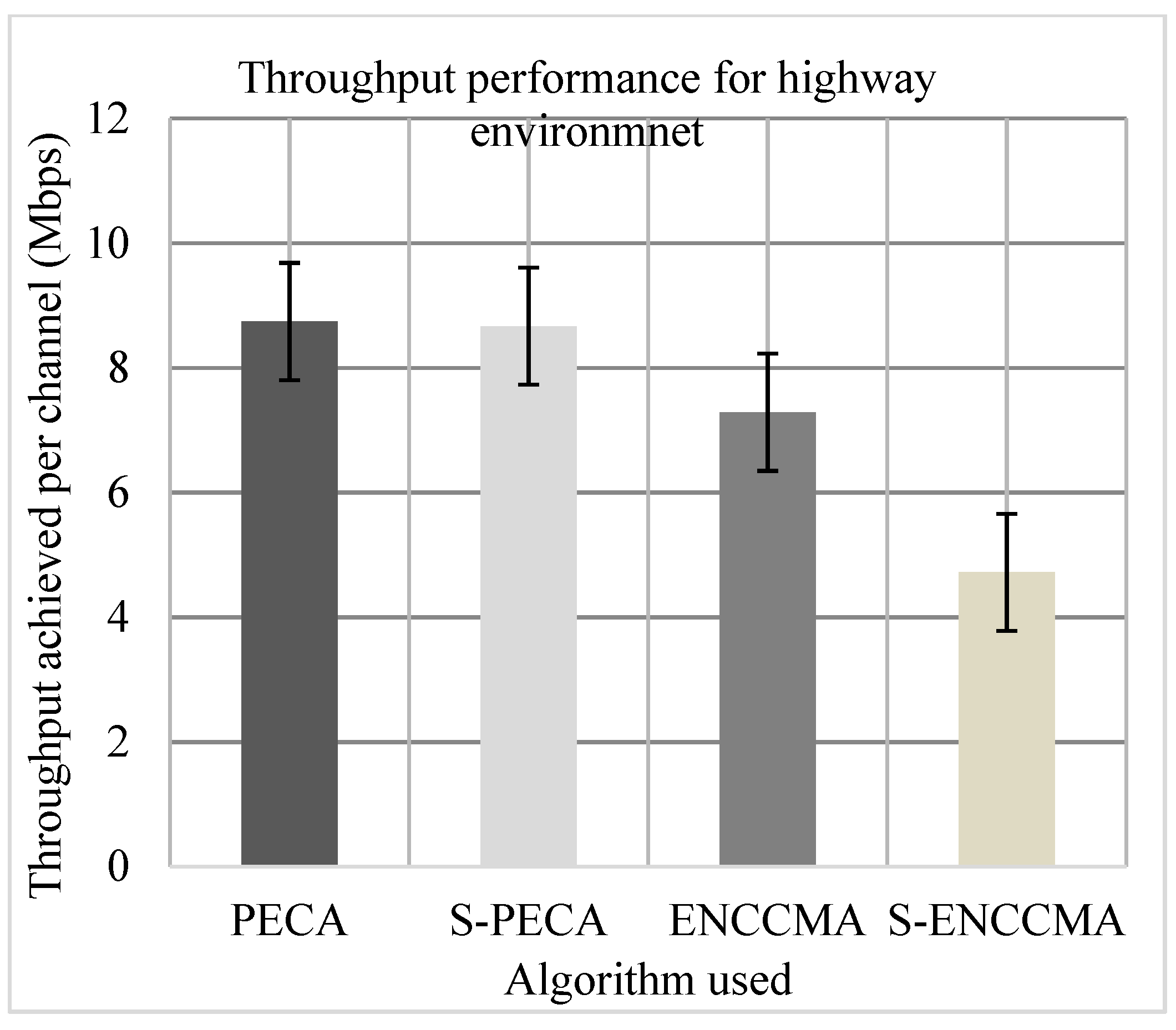
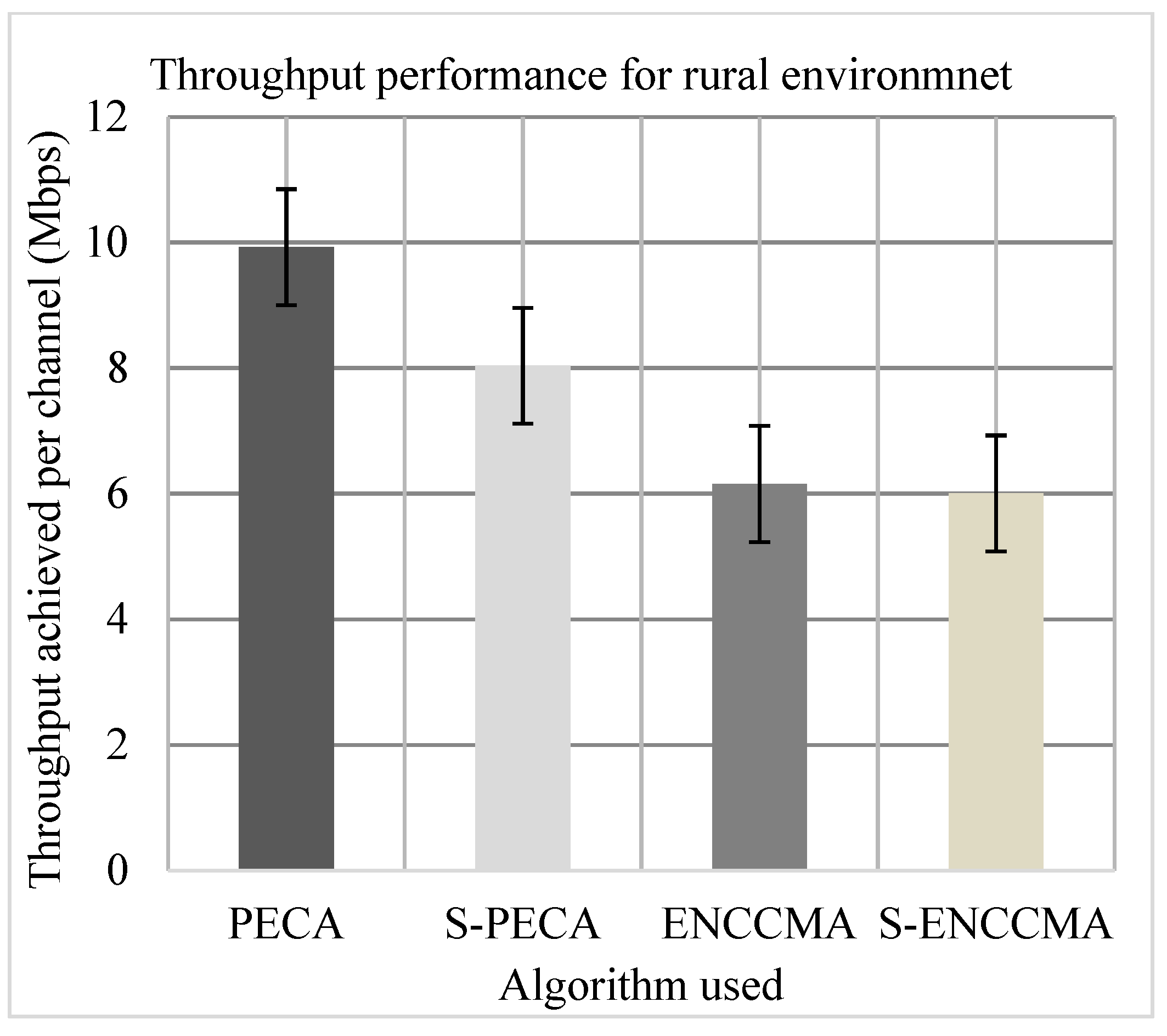
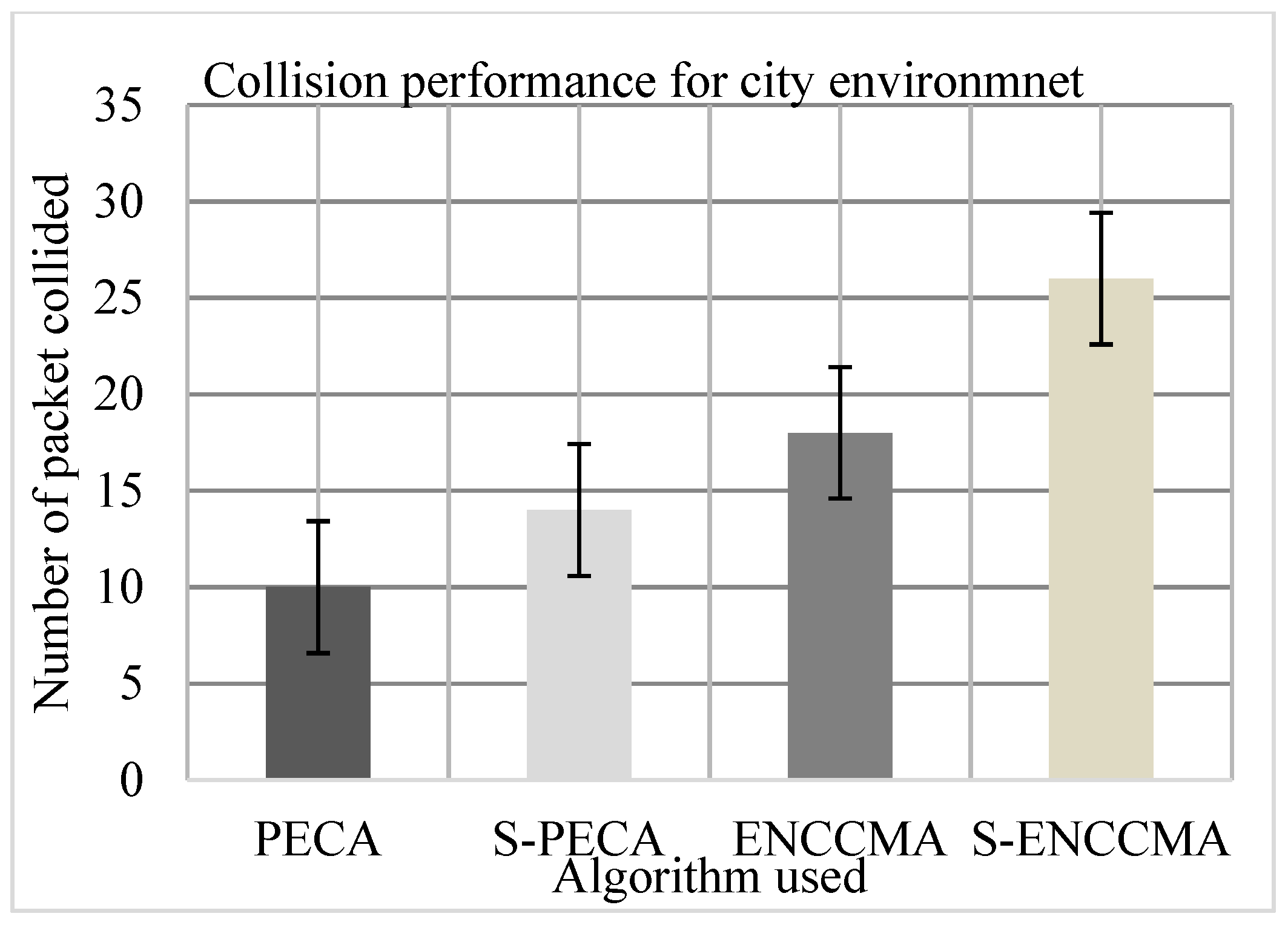
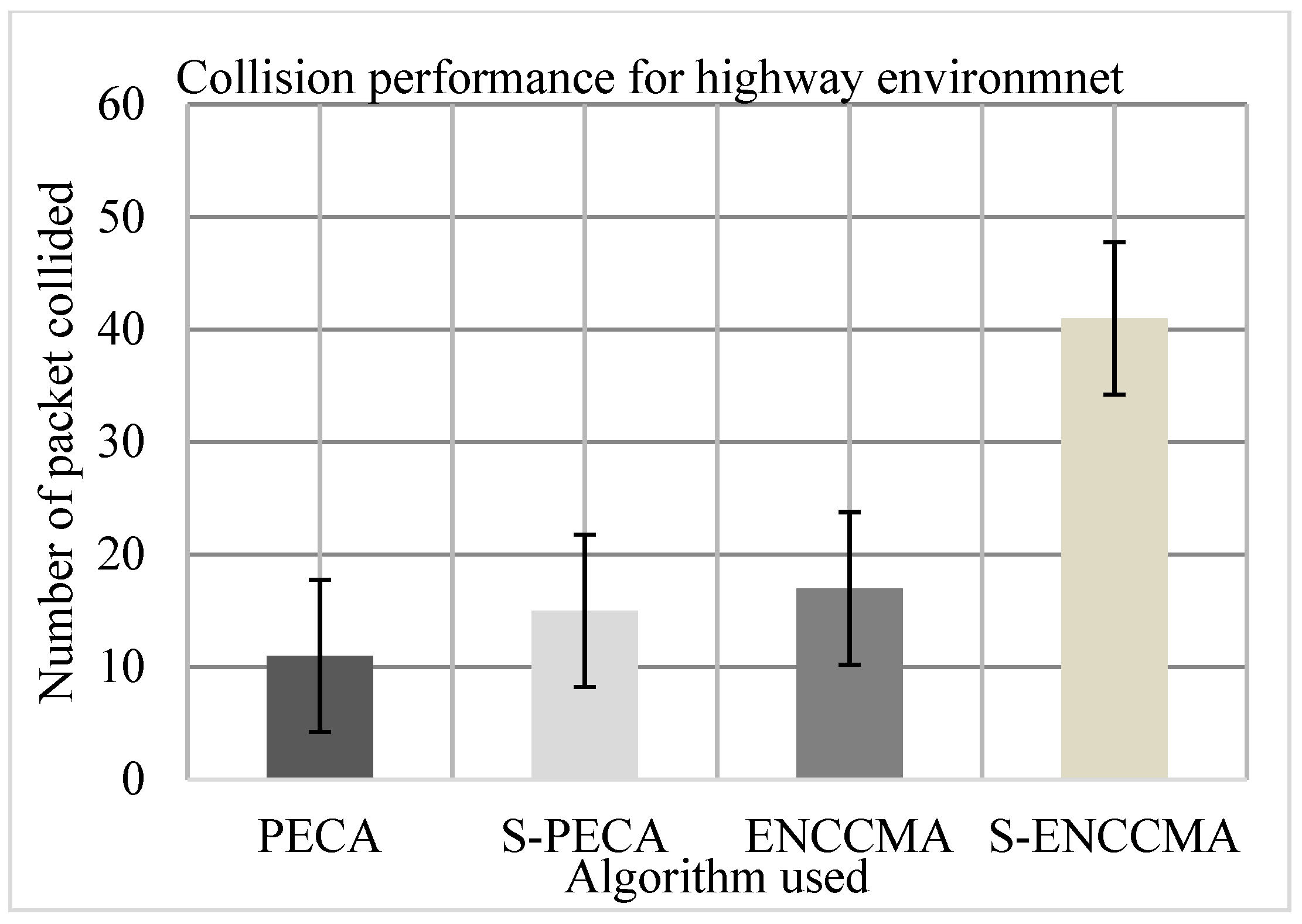
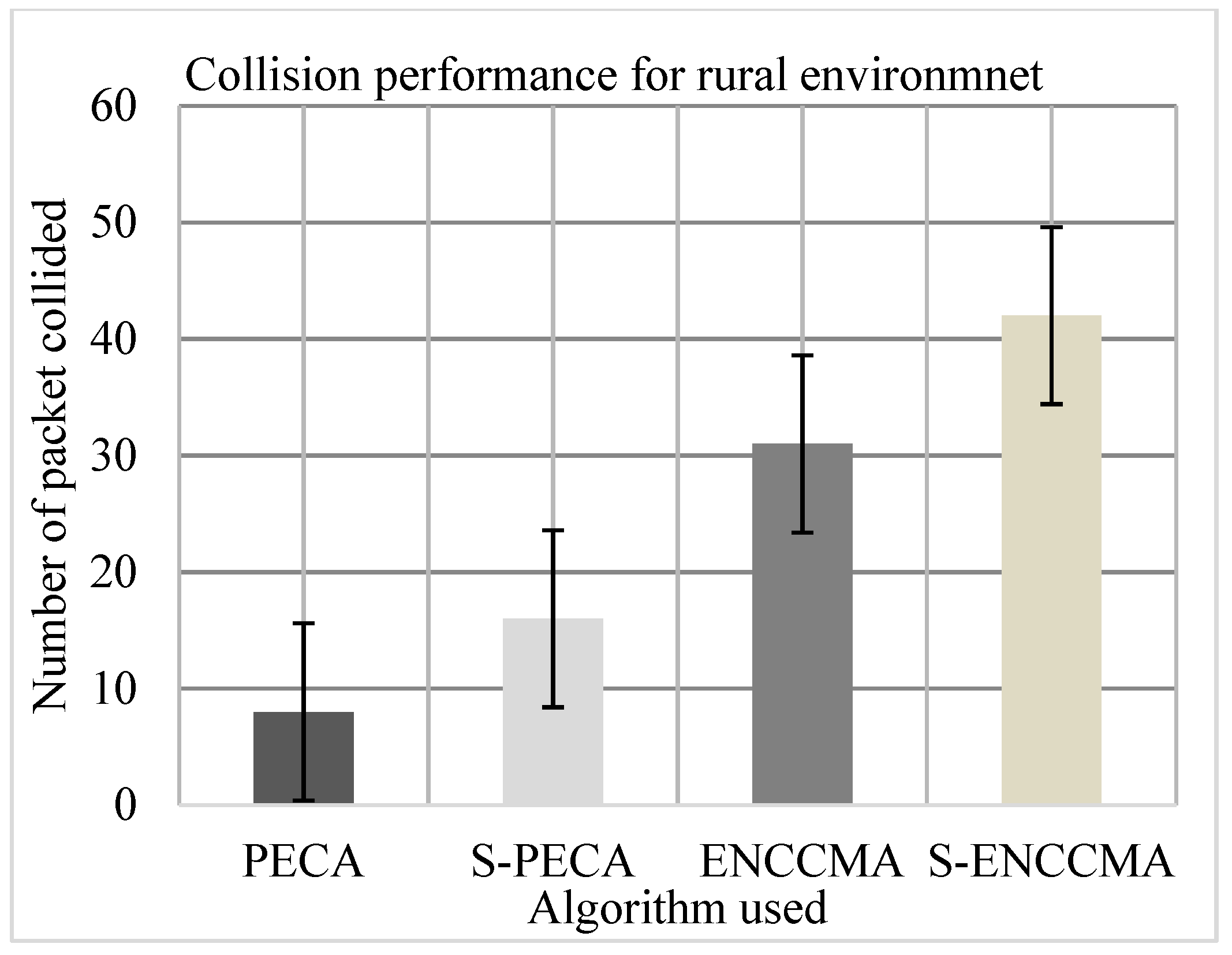
4. Results
- (a)
- Throughput
- (b)
- Collision
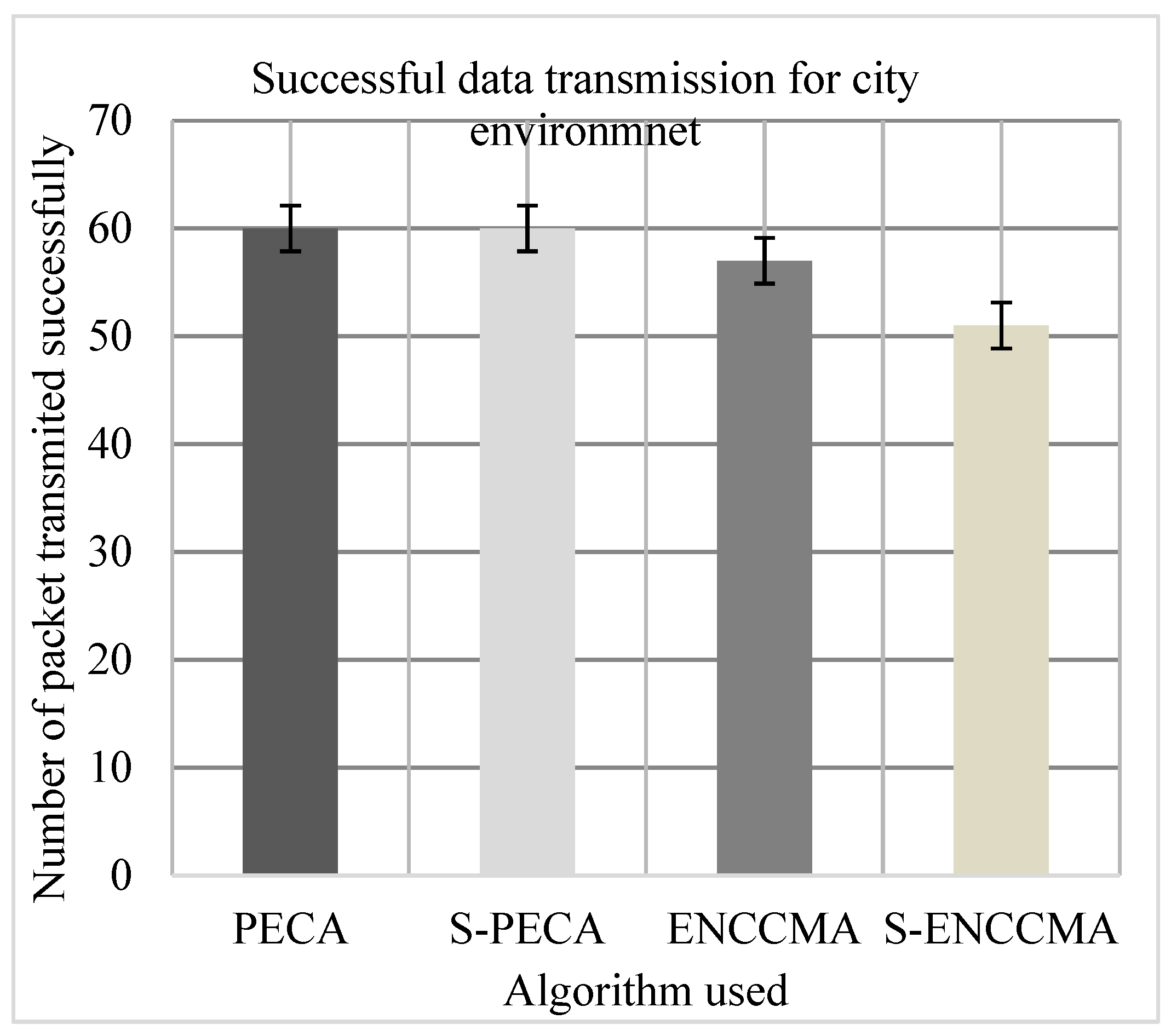
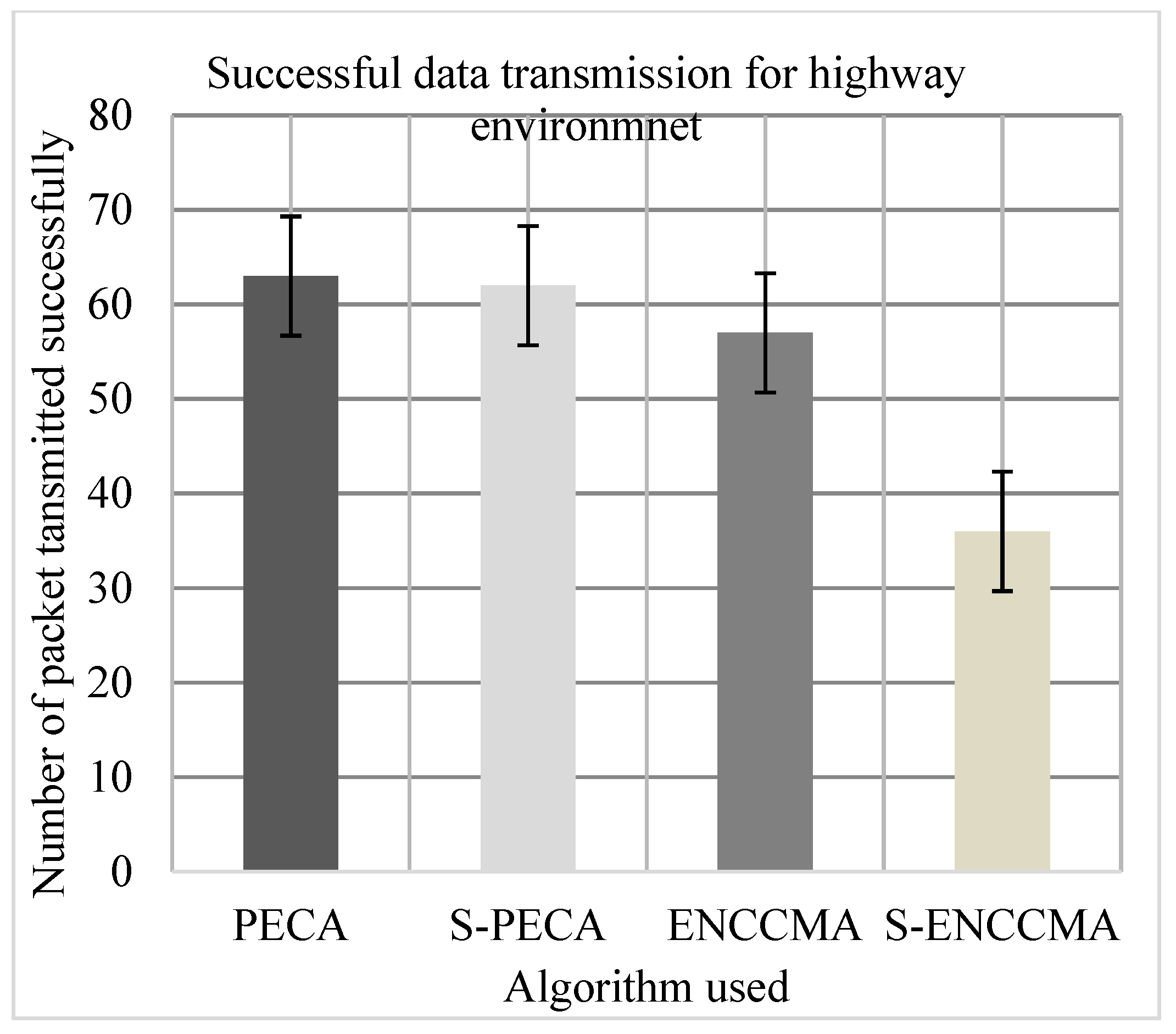
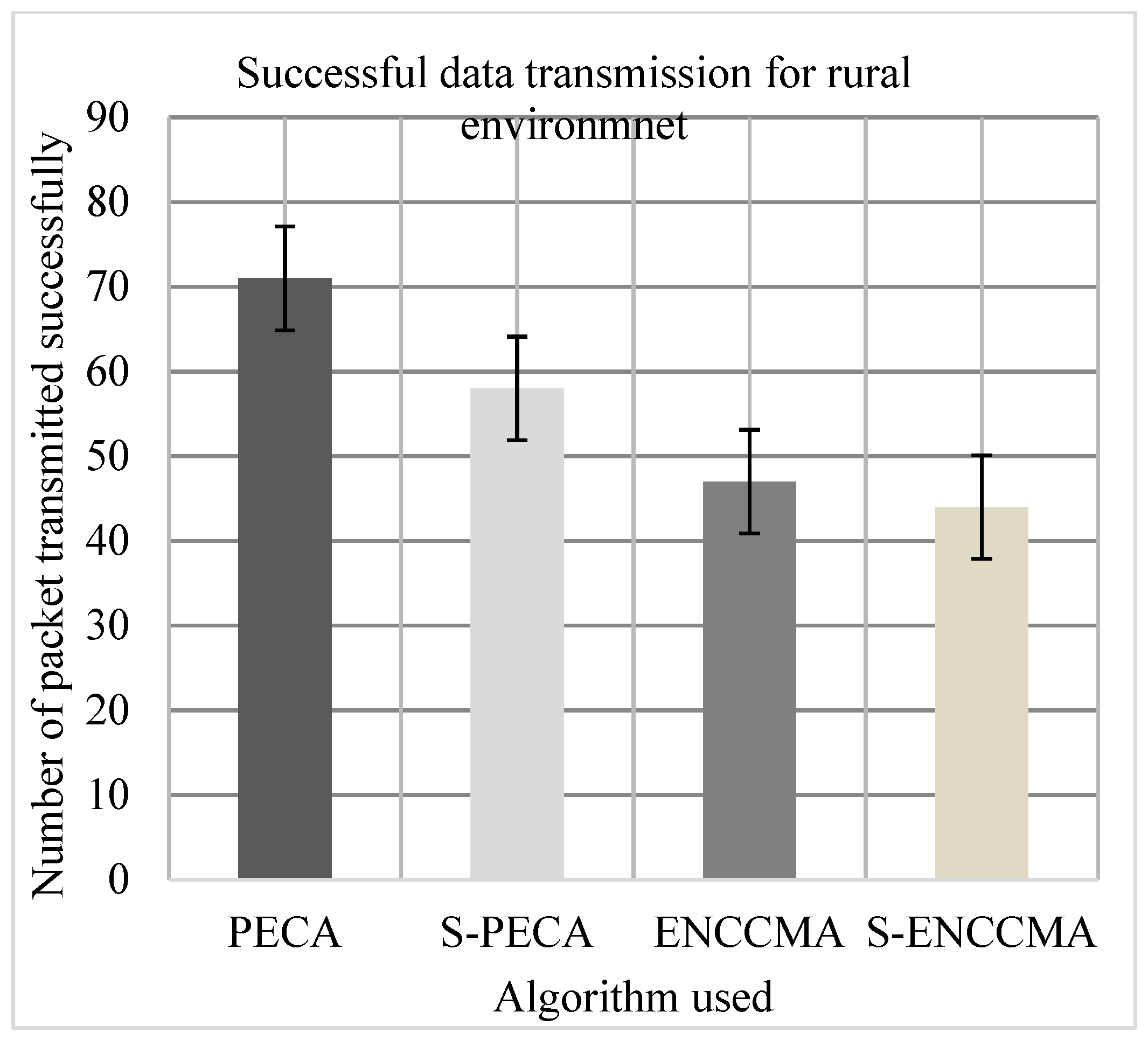
- (c)
- Performance of successful data transmission
5. State-of-the-Art Technology Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Issam, W.; Damaj, D.; Serhal, K.; Lama, A.; Rached, H.; Zantout, N.; Mouftah, H.T. Connected and Autonomous Electric Vehicles: Quality of Experience survey and taxonomy. Veh. Commun. 2021, 28, 100312. [Google Scholar]
- Ros, F.J.; Ruiz, P.M.; Stojmenovic, I. Acknowledgment-based broadcast protocol for reliable and efficient data dissemination in vehicular ad-hoc networks. IEEE Trans. Mob. Comput. 2012, 11, 33–46. [Google Scholar] [CrossRef]
- Ahmed, A.; Rasheed, H.; Liyanage, M. Millimeter-Wave Channel Modeling in a Vehicular Ad-Hoc Network Using Bose–Chaudhuri–Hocquenghem (BCH) Code. Electronics 2021, 10, 992. [Google Scholar] [CrossRef]
- Azees, M.; Vijayakumar, P.; Deborah, L.J. Comprehensive survey on security services in vehicular ad-hoc networks. IET Intell. Transp. Syst. 2016, 10, 379–388. [Google Scholar] [CrossRef]
- Dedicated Short Range Communications (DSRC). Available online: http://grouper.ieee.org/groups/scc32/dsrc/index.html (accessed on 1 July 2021).
- Keyvan, A. Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band. IET Intell. Transp. Syst. 2021, 15, 213–224. [Google Scholar]
- Petit, J.; Schaub, F.; Feiri, M.; Kargl, F. Pseudonym Schemes in Vehicular Networks: A Survey. IEEE Commun. Surv. Tutor. 2015, 17, 228–255. [Google Scholar] [CrossRef]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Miao, L.; Virtusio, J.J.; Hua, K.-L. PC5-Based Cellular-V2X Evolution and Deployment. Sensors 2021, 21, 843. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. V2V communication modeling for environmental channel throughput and radio propagation. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 18–20 October 2017; pp. 507–512. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Kang, Y.J.; Lee, H.J. Obstacles Effects on Signal Attenuation in Line of Sight for Different Environments in V2V. In Proceedings of the 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon-si, Gangwon-do, Korea, 11–14 February 2018; pp. 17–20. [Google Scholar]
- ITS Standards Fact Sheets. In Proceedings of the IEEE 1609—Family of Standards for Wireless Access in Vehicular Environments (WAVE); United States Department of Transportation: Washington, DC, USA, 2009.
- Storck, C.R.; Duarte-Figueiredo, F. A Survey of 5G Technology Evolution, Standards, and Infrastructure Associated with Vehicle-to-Everything Communications by Internet of Vehicles. IEEE Access 2020, 8, 117593–117614. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. Performance Analysis for City, Highway and Rural Area in Vehicle-to-Vehicle Network. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 17–19 October 2018. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Hind, R.; Lee, H.J. A Novel Throughput and Collision for City Environment in V2V Communication. In Proceedings of the 10th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 16–18 October 2019; pp. 1413–1415. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. Comparison between DSRC and other Short-Range Wireless Communication Technologies. In Proceedings of the 2020 22nd International Conference on Advanced Communication Technology (ICACT) Phoenix Park, PyeongChang, Korea, 16–19 February 2020; pp. 1–5. [Google Scholar]
- Chang, C.Y.; Yen, H.C.; Deng, D.J. V2V QoS Guaranteed Channel Access in IEEE 802.11p VANETs. IEEE Trans. Veh. Technol. 2015, 13, 5–17. [Google Scholar] [CrossRef]
- EU Road Safety Policy Framework 2021–2030—Next steps towards “Vision Zero”, European Commission, Brussels, 19.6.2019. Available online: https://ec.europa.eu/transport/sites/transport/files/legislation/swd20190283-roadsafety-vision-zero.pdf (accessed on 2 May 2021).
- 40+ Corporations Working on Autonomous Vehicles, 16 December 2020. Available online: https://www.cbinsights.com/research/autonomous-driverless-vehicles-corporations-list/ (accessed on 6 May 2021).
- IEEE Connected & Autonomous Vehicles. Available online: https://site.ieee.org/connected-vehicles/news/news/ (accessed on 4 June 2021).
- Ho, T.M.; Tran, T.D.; Nguyen, T.T.; Kazmi, S.M.A.; Le, L.B.; Hong, C.S.; Hanzo, L. Next-generation wireless solutions for the smart factory, smart vehicles, the smart grid and smart cities. arXiv 2019, arXiv:1907.10102. [Google Scholar]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero-Ibáñez, J. Internet of Vehicles: Architecture, Protocols, and Security. IEEE Internet Things J. 2018, 5, 3701–3709. [Google Scholar] [CrossRef]
- Bharat, M.; Sree, K.S.; Kumar, T.M. Authentication solution for security attacks in VANETs. Int. J. Adv. Res. Comput. Commun. Eng. 2014, 3, 7661–7664. [Google Scholar]
- Farash, M.S.; Turkanović, M.; Kumari, S.; Hölbl, M. An efficient user authentication and key agreement scheme for heterogeneous wireless sensor network tailored for the Internet of Things environment. Ad Hoc Netw. 2016, 36, 152–176. [Google Scholar] [CrossRef]
- Li, H.; Lu, R.; Zhou, L.; Yang, B.; Shen, X. An efficient Merkletree- based authentication scheme for smart grid. IEEE Syst. J. 2014, 8, 655–663. [Google Scholar] [CrossRef]
- Li, H.; Liu, D.; Dai, Y.; Luan, T.H. Engineering searchable encryption of mobile cloud networks: When QoE meets QoP. IEEE Wirel. Commun. 2015, 22, 74–80. [Google Scholar] [CrossRef]
- Qu, F.; Wu, Z.; Wang, F.Y.; Cho, W. A security and privacy review of VANETs. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2985–2996. [Google Scholar] [CrossRef]
- He, D.; Zeadally, S.; Xu, B.; Huang, X. An efficient identity-based conditional privacy-preserving authentication scheme for vehicular adhoc networks. IEEE Trans. Inf. Forensics Secur. 2015, 10, 2681–2691. [Google Scholar] [CrossRef]
- Kafle, V.P.; Fukushima, Y.; Fujikawa, K.; Harai, H. ID-based communication framework in future networks. Wirel. Pers. Commun. 2016, 86, 1735–1750. [Google Scholar] [CrossRef]
- Zhou, A.; Li, J.; Sun, Q.; Fan, C.; Lei, T.; Yang, F. A security authentication method based on trust evaluation in VANETs. EURASIP J. Wirel. Commun. Netw. 2015, 1, 1. [Google Scholar] [CrossRef]
- Li, W.; Song, H. ART: An attack-resistant trust management scheme for securing vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 960–969. [Google Scholar] [CrossRef]
- Wagan, A.A.; Jung, L.T. Security framework for low latency VANET applications. In Proceedings of the IEEE International Conference on Computer and Information Sciences (ICCOINS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–6. [Google Scholar]
- Suresh, J.S.; Jongkun, L. A TPM-based architecture to secure VANET. Indian J. Sci. Technol. 2015, 8, 15. [Google Scholar] [CrossRef]
- Rehman, A.; Hassan, M.F.B. Design Specification of Context Cognitive Trust Evaluation Model for V2V Communication in IoV. Emerging Trends in Intelligent Computing and Informatics, (IRICT 2019). Adv. Intell. Syst. Comput. 2019. [Google Scholar]
- Rajput, U.; Abbas, F.; Oh, H. A Hierarchical Privacy Preserving Pseudonymous Authentication Protocol for VANET. IEEE Access 2016, 4, 7770–7784. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Chang, G. Efficient Privacy-Preserving Dual Authentication and Key Agreement Scheme for Secure V2V Communications in an IoV Paradigm. IEEE Trans. Intell. Transp. Syst. 2017, 99, 1–10. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network. Sensors 2019, 19, 3283. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Ekici, E.; Kremo, H.; Altintas, O. Throughput-Efficient Channel Allocation Algorithms in Multi-Channel Cognitive Vehicular Networks. IEEE Trans. Wirel. Commun. 2017, 16, 757–770. [Google Scholar] [CrossRef]
- Manzano, M.; Espinosa, F.; Ángel, M.; Santos, B.; Vicente, A.G. Cognitive Self-Scheduled Mechanism for Access Control in Noisy Vehicular Ad Hoc Networks. Hindawi Publishing Corporation. Math. Probl. Eng. 2015, 2015, 354292. [Google Scholar] [CrossRef]
- Kasana, R.; Kumar, S.; Kaiwartya, O.; Yan, W.; Cao, Y.; Abdullah, A. Location error resilient geographical routing for vehicular ad-hoc networks. IET Intell. Transp. Syst. 2017, 11, 450–458. [Google Scholar] [CrossRef] [Green Version]
- Makarfi, A.U.; Rabie, K.M.; Kaiwartya, O.; Xingwang Li, X.; R. Kharel, R. Physical Layer Security in Vehicular Networks with Reconfigurable Intelligent Surfaces. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Hsiao, H.; Studer, A.; Chen, C.; Perrig, A.; Bai, F.; Bellur, B. Floodingresilient Broadcast Authentication for VANET. In Proceedings of the 17th Annual International Conference on Mobile Computing and Networking (MobiCom), Las Vegas, NV, USA, 19–23 September 2011; pp. 193–204. [Google Scholar]
- Moayad, A.; Safa, O.; Ismaeel, A.R.; Yaser, J. An intrusion detection system for connected vehicles in smart cities. Ad Hoc Netw. 2019, 90, 101842. [Google Scholar]
- Balasubramanian, V.; Aloqaily, M.; Reisslein, M. An SDN architecture for time sensitive industrial IoT. Comput. Netw. 2021, 186, 107739. [Google Scholar] [CrossRef]
- Ridhawi, I.A.; Otoum, S.; Aloqaily, M.; Jararweh, Y.; Baker, T. Providing secure and reliable communication for next generation networks in smart cities. Sustain. Cities Soc. 2020, 56, 102080. [Google Scholar] [CrossRef]
- Wei, Z.; Yanjiang, Y.; Wu, Y.; Weng, J.; Deng, R.H. HIBS-KSharing: Hierarchical Identity-Based Signature Key Sharing for Automotive. IEEE Access 2017, 5, 16314–16323. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, J.; Zhong, H.; Xu, Y. SPACF: A Secure Privacy-preserving Authentication Scheme for VANET with Cuckoo Filter. IEEE Trans. Veh. Technol. 2017, 66, 10283–10295. [Google Scholar] [CrossRef]
- TABF Editorial Board; Huang, H.C.C. Basic Knowledge on FinTech; Hyweb Technology Co. Ltd.: Zhubei City, Taiwan, 2020. [Google Scholar]
- Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. Varied density of vehicles under city, highway and rural environments in V2V communication. Int. J. Sens. Netw. 2020, 33, 148–158. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Ahmed, A.A.; Kim, T.; Lee, H.J. An Environmental Channel Throughput and Radio Propagation Modeling for Vehicle-to-Vehicle Communication. Int. J. Distrib. Sens. Netw. 2018, 14, 1–10. [Google Scholar]
- Al-Absi, M.A.; Al-Absi, A.A.; Sain, M.; Lee, H. Moving Ad Hoc Networks—A Comparative Study. Sustainability 2021, 13, 6187. [Google Scholar] [CrossRef]
- Bilgin, B.E.; Gungor, V.C. Performance Comparison of IEEE 802.11p and IEEE 802.11b for Vehicle-to-Vehicle Communications in Highway, Rural, and Urban Areas. Int. J. Veh. Technol. 2013, 2013, 971684. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B.M. An OFDMA-Based MAC Protocol for Next-Generation VANETs. IEEE Trans. Veh. Technol. 2015, 64, 4088–4100. [Google Scholar] [CrossRef]
- Ferreira, N.F.G.C.; Fonseca, J.A.G. Improving Safety Message Delivery through RSU’s Coordination in Vehicular Networks. In Proceedings of the 2015 IEEE World Conference on Factory Communication Systems (WFCS), Palma de Mallorca, Spain, 27–29 May 2015; pp. 1–8. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Type | Distance |
|---|---|---|
| Notations | Abbreviation |
|---|---|
| Vehicle | |
| Throughput Achieved | |
| Channel allocation decision | |
| Channel | |
| Channel set allocated to vehicle | |
| The likelihood for channel accessibility | |
| The likelihood for channel accessibility for at most one channel | |
| The likelihood that channel is not accessible | |
| Throughput increment | |
| The input set of accessible channels | |
| Throughput before channel allocation. | |
| Throughput after channel allocation . | |
| Is the total number of channels in the network | |
| Is the probability of vehicle not accessing the channel | |
| channel allocation | |
| Is the probability of vehicle accessing the channel | |
| MAC Overhead | |
| Number of vehicles | |
| The sharing vehicles of channel | |
| Is the common shared channel | |
| The shared channel user number | |
| Is the user’s number using the shared channel | |
| Is the likelihood computation of throughput gain on a shared user channel | |
| The region member required to securely communicate over the secure channel | |
| Vehicle | |
| A set of channels shared by | |
| Group of vehicles who share channel | |
| A set of channels shared by vehicle | |
| contention window | |
| Likelihood of the first collision | |
| likelihood tradeoff | |
| No. of vehicles | |
| Arbitrary back-off time | |
| Condition likelihood of the first collision | |
| The likelihood that vehicles participate in the contention phase | |
| Set of all vehicles | |
| A specific set of user | |
| Mean value of the back-off parameter | |
| Mean Overhead | |
| Corresponding time of CTS | |
| Corresponding time of RTS | |
| Corresponding time of SIFS | |
| Size of synchronization packets | |
| Time of sensing | |
| A time that corresponds to one back off param | |
| Cycle Time | |
| Prime Number | |
| Prime Number | |
| Public Key | |
| Secret Key | |
| Data | |
| EncData | |
| Decryption EncData |
| Environment | City | Highway | Rural |
|---|---|---|---|
| Path loss | 1.61 | 1.85 | 1.79 |
| Shadowing deviation | 3.4 | 3.2 | 3.3 |
| Parameters | Network | MAC | Modulation Scheme | Mobility | Bandwidth | Frequency Channels | Vehicles | Environment |
|---|---|---|---|---|---|---|---|---|
| Value | 30 m ∗ 30 m | ENCCMA, S-ENCCMA, PECA andS-PECA | QAM-64 | 20 cycle per frame | 27 Mbps | 7 | 20 | City, Highway, & Rural |
| Environment | Flowing vehicles freely | Highway and Urban | driver intelligent | NA | |
| Algorithm | |||||
| Vehicle varied Density | Yes | No | No | No | No |
| Simulator used | |||||
| MAC USED | |||||
| Mobility | Yes | Yes | Yes | Yes | Yes |
| Channel sharing available | Yes | Yes | No | No | No |
| Reference | (Ours) | [37] | [53] | [54] | [17] |
| Acronyms | Definition |
|---|---|
| VANET | Vehicular Ad hoc Network |
| Secure Performance Enriched Channel Allocation | |
| Secure Non-Cooperative Cognitive Division Multiple Access | |
| Time Division Multiple Access | |
| Frequency Division Multiple Access | |
| Rivest–Shamir–Adleman | |
| Cognitive Radio | |
| V2V | Vehicle to Vehicle |
| Vehicle to Infrastructure | |
| Vehicle to Everything | |
| On Board Unit | |
| Road-Side Unit | |
| DSRC | dedicated short range communication |
| MAC | Medium Access Control |
| Mobile Ad hoc Network | |
| Federal Communications Commission | |
| Intelligent Transportation Systems | |
| Radio-frequency identification | |
| Wireless Access in Vehicular Environment | |
| Global Positioning System | |
| LTE | Long-Term Evolution |
| V2N | Vehicle-to-Network |
| PLS | Physical Layer Security |
| Internet of Vehicles | |
| CRL | Certificate Revocation List |
| RIS | reconfigurable intelligent surface |
| Internet of things | |
| SVC | Secure VANET Communication |
| Non-Shared Channel Allocation | |
| Elliptical Curve Cryptography | |
| Commutative RSA | |
| CHR | City, Highway, and Rural |
| MS-Aloha | Mobile Slotted Aloha |
| VISSIM | Verkehr In Stadten Simulationsmodell |
| Earliest Deadline First based Carrier Sense Multiple Access |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Absi, M.A.; Al-Absi, A.A.; Fu, R.; Kim, K.-H.; Lee, Y.-S.; Lee, B.-G.; Lee, S.-G.; Lee, H.-J. Secure and Efficient High Throughput Medium Access Control for Vehicular Ad-Hoc Network. Sensors 2021, 21, 4935. https://doi.org/10.3390/s21144935
Al-Absi MA, Al-Absi AA, Fu R, Kim K-H, Lee Y-S, Lee B-G, Lee S-G, Lee H-J. Secure and Efficient High Throughput Medium Access Control for Vehicular Ad-Hoc Network. Sensors. 2021; 21(14):4935. https://doi.org/10.3390/s21144935
Chicago/Turabian StyleAl-Absi, Mohammed Abdulhakim, Ahmed Abdulhakim Al-Absi, Rui Fu, Ki-Hwan Kim, Young-Sil Lee, Byung-Gook Lee, Sang-Gon Lee, and Hoon-Jae Lee. 2021. "Secure and Efficient High Throughput Medium Access Control for Vehicular Ad-Hoc Network" Sensors 21, no. 14: 4935. https://doi.org/10.3390/s21144935