
Design, Ground Testing and On-Orbit Performance of a Sun Sensor Based on COTS Photodiodes for the UPMSat-2 Satellite

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
- SSBV magnetometers, to measure the orientation of the satellite in relation to the Earth’s magnetic field;
- ZARM Technik AG magnetorquers, that produce the torques to change the satellite’s attitude;
- A control law developed at IDR/UPM Institute that use the information from the magnetometers to order the magnetorquers action.
- The recalibration of the magnetometers based on the measurements of the Earth’s magnetic field carried out by the satellite;
- The validation of the COTS (Commercial Off-The-Shelf) photodiodes-based sun sensor designed, built, and tested for this mission at the IDR/UPM Institute.
2. Sun Sensor Design and Fabrication
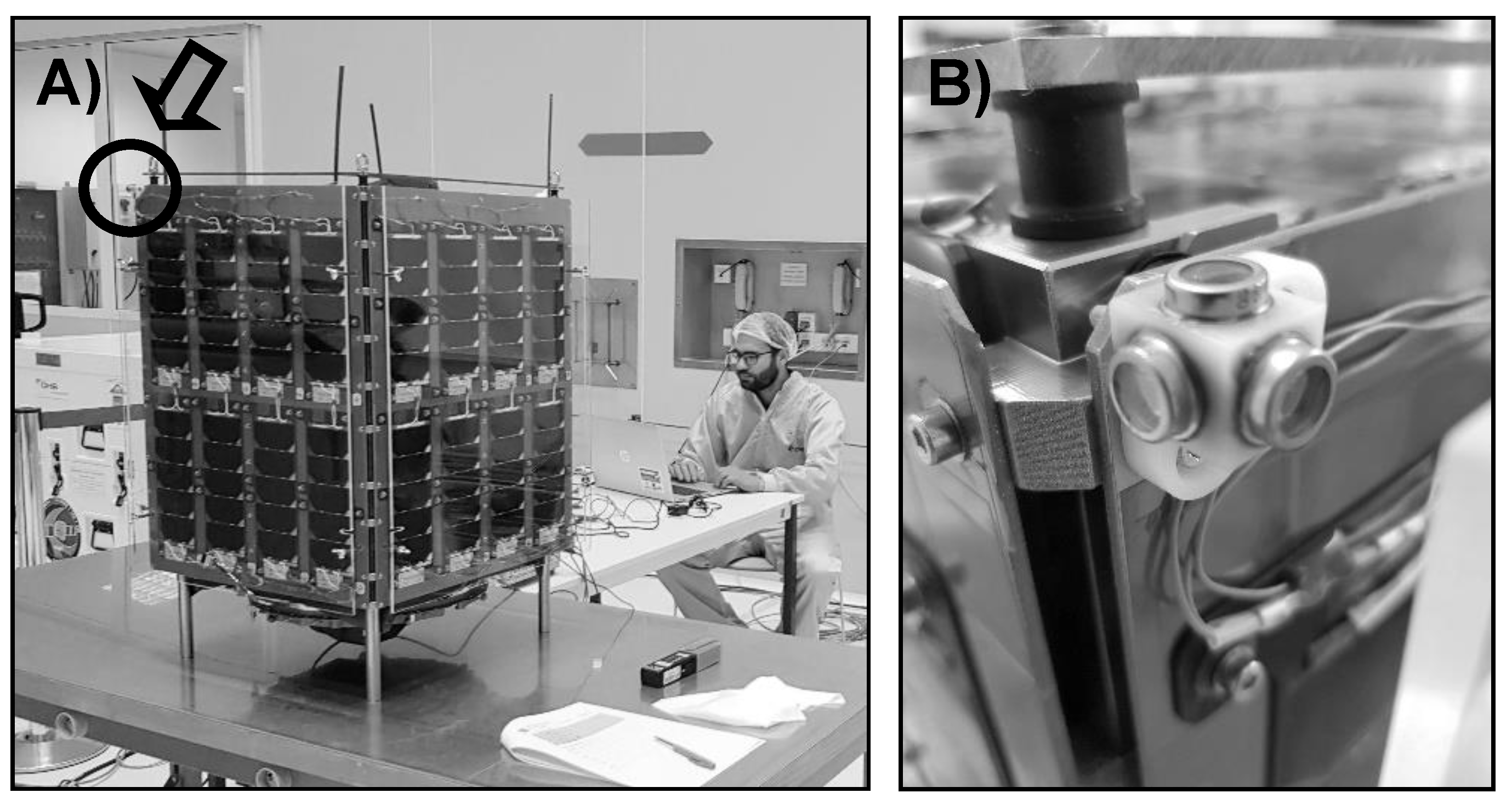
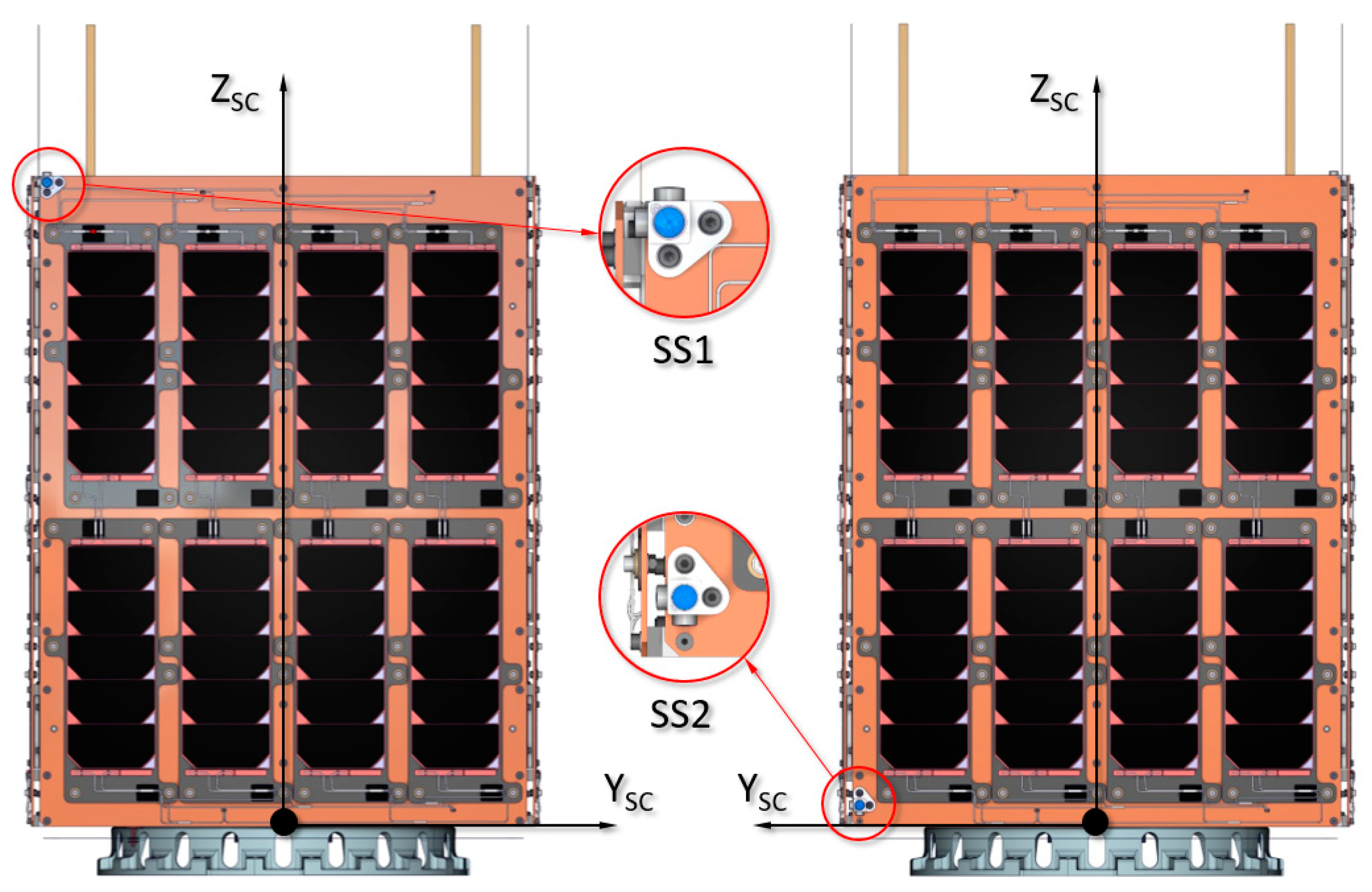
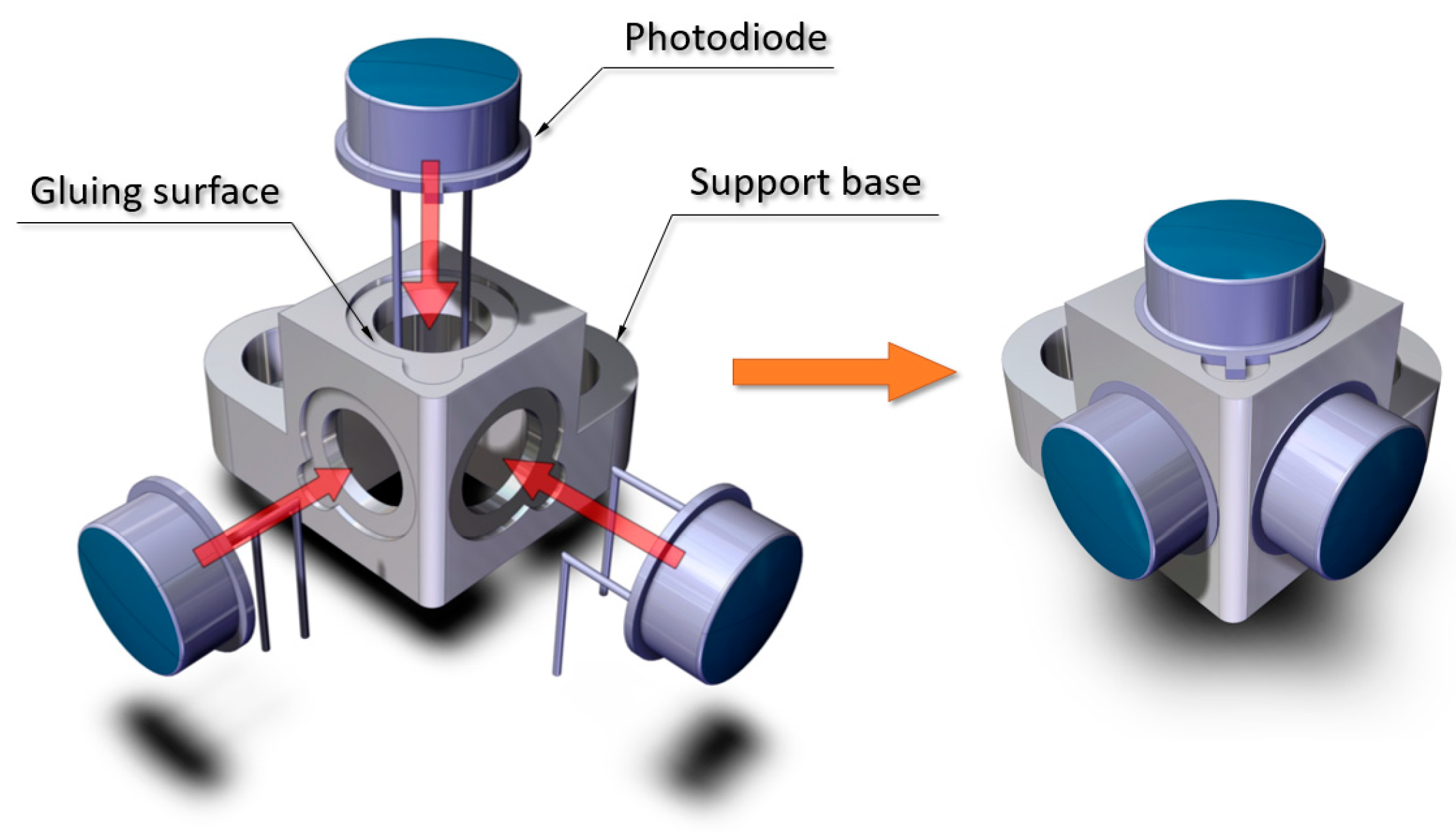
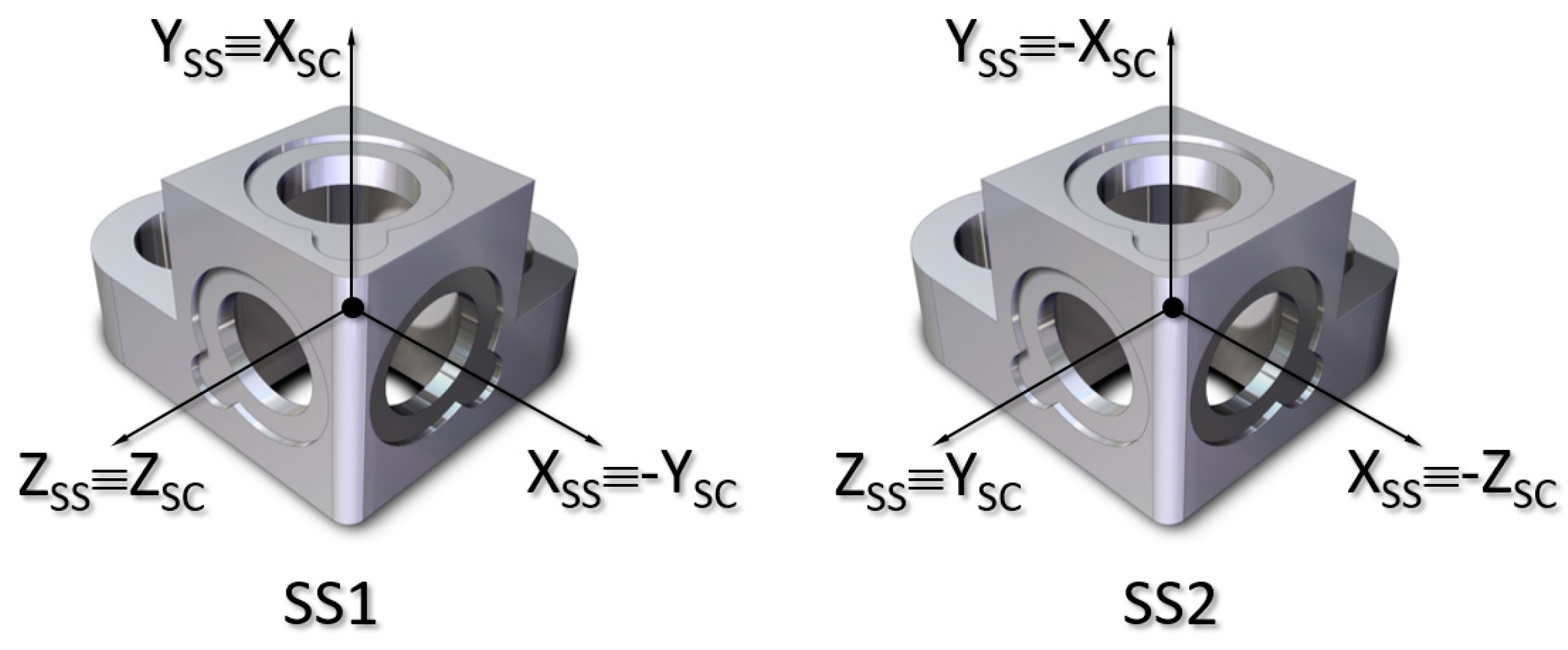
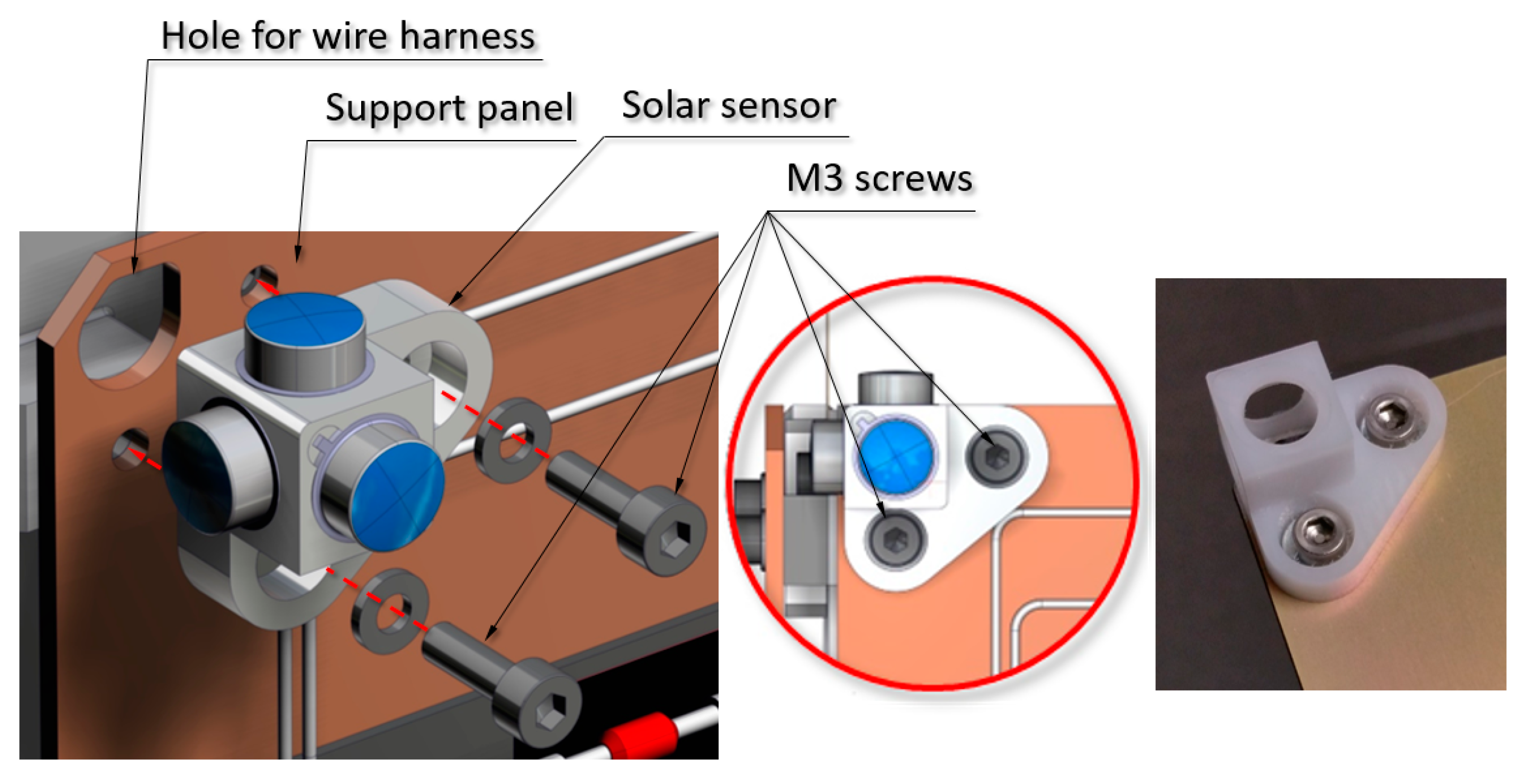
2.1. Sun Sensor Physical Design
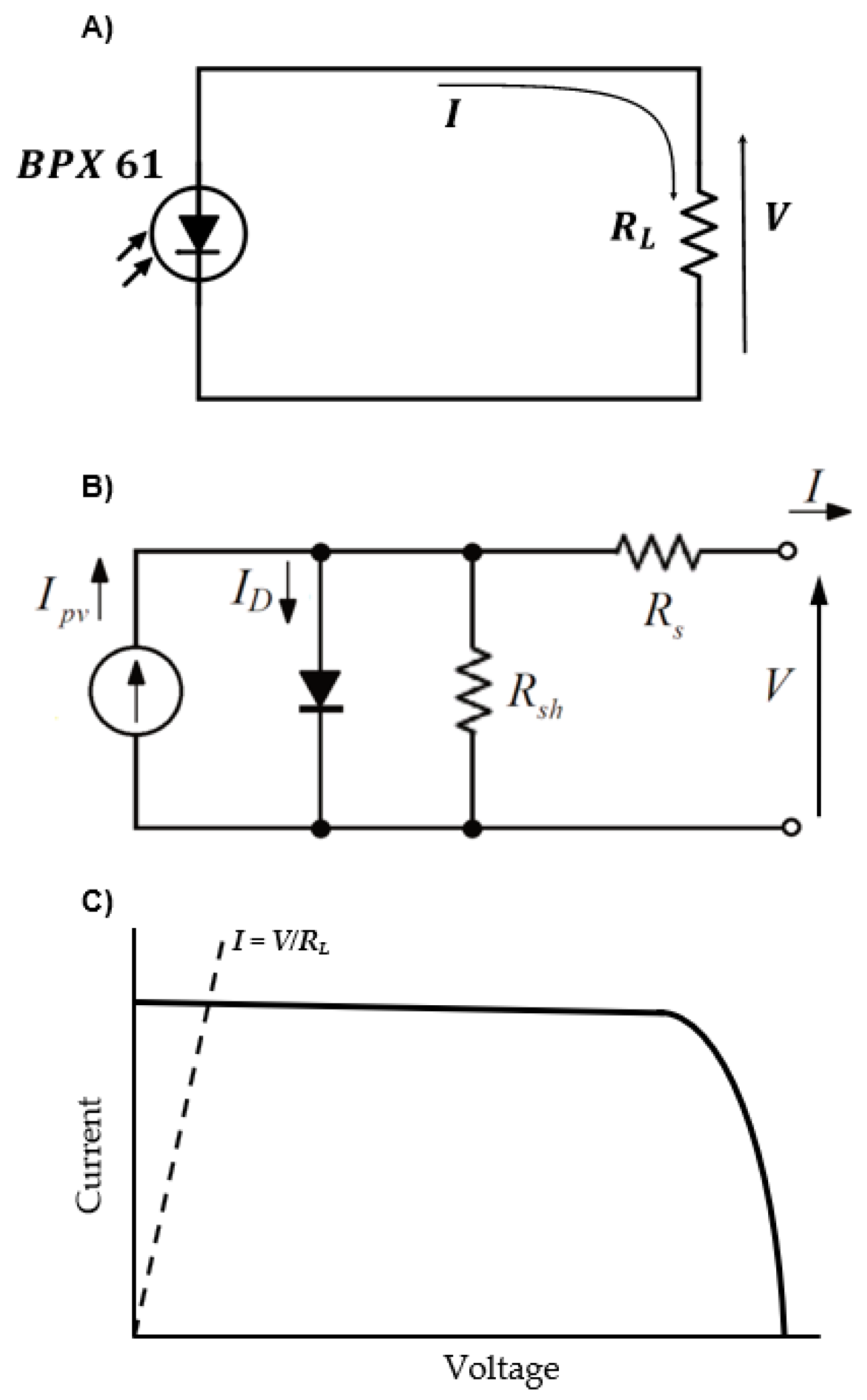
2.2. Sun Sensor Electrical Design
3. Testing Set-Up and Methodology
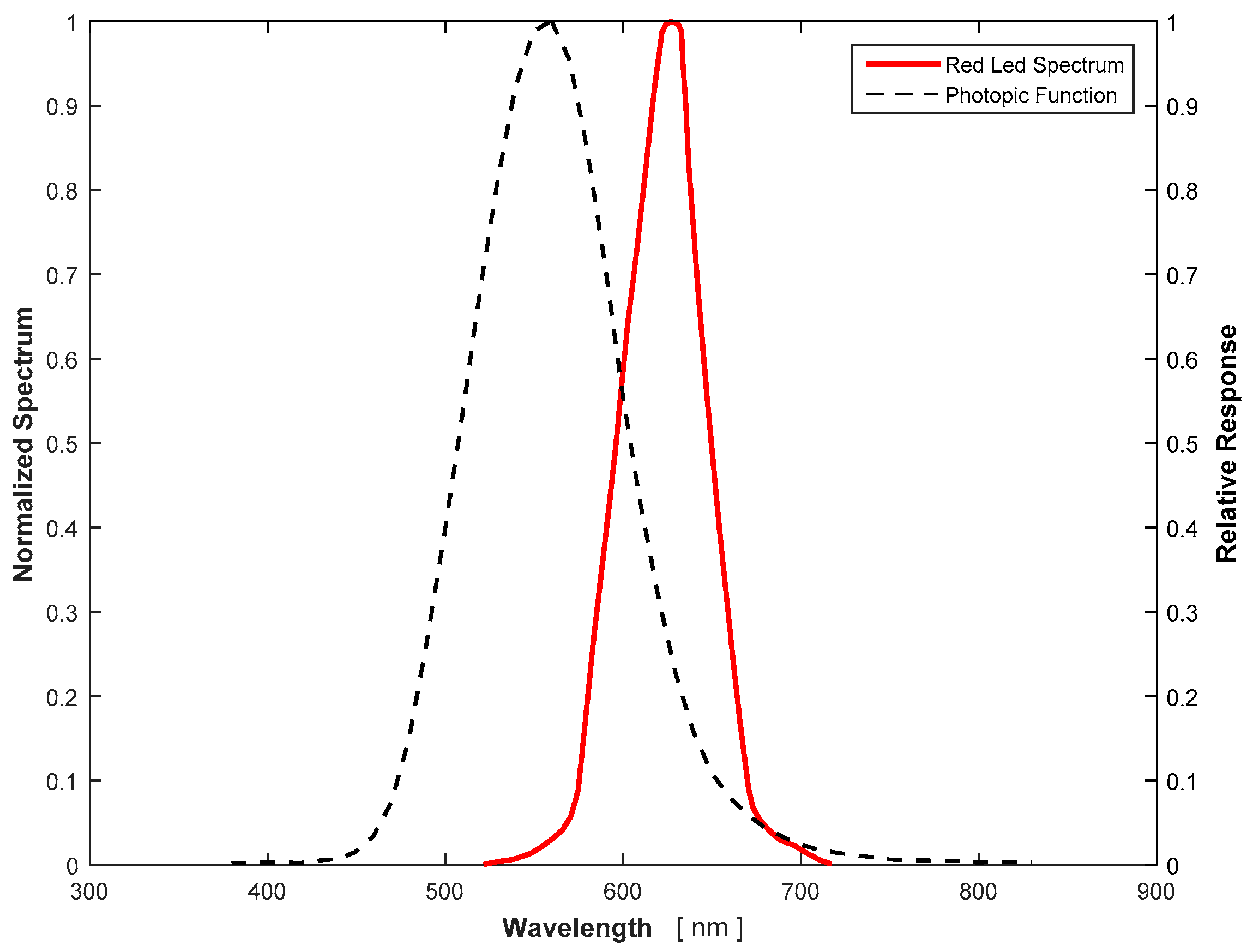
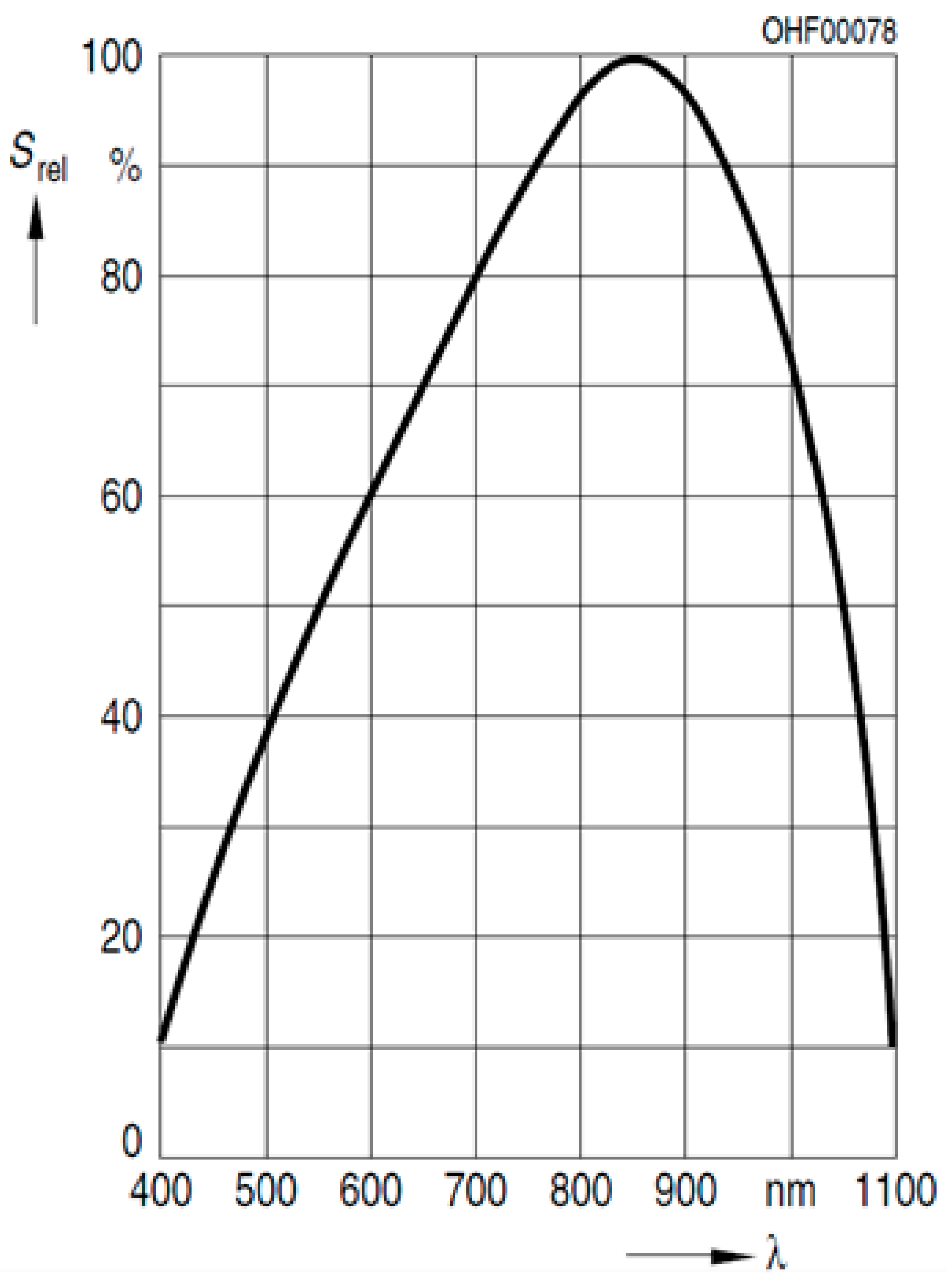
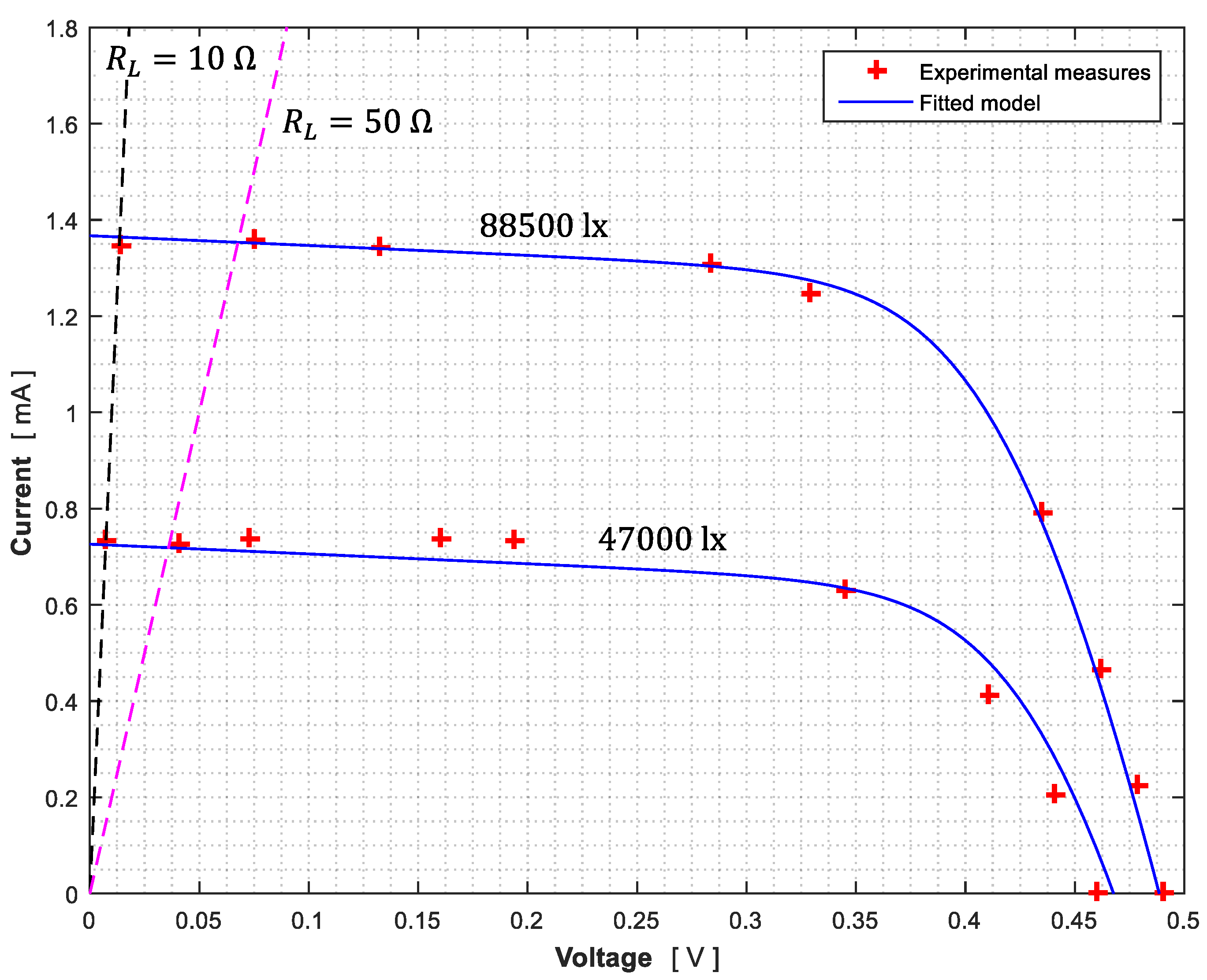
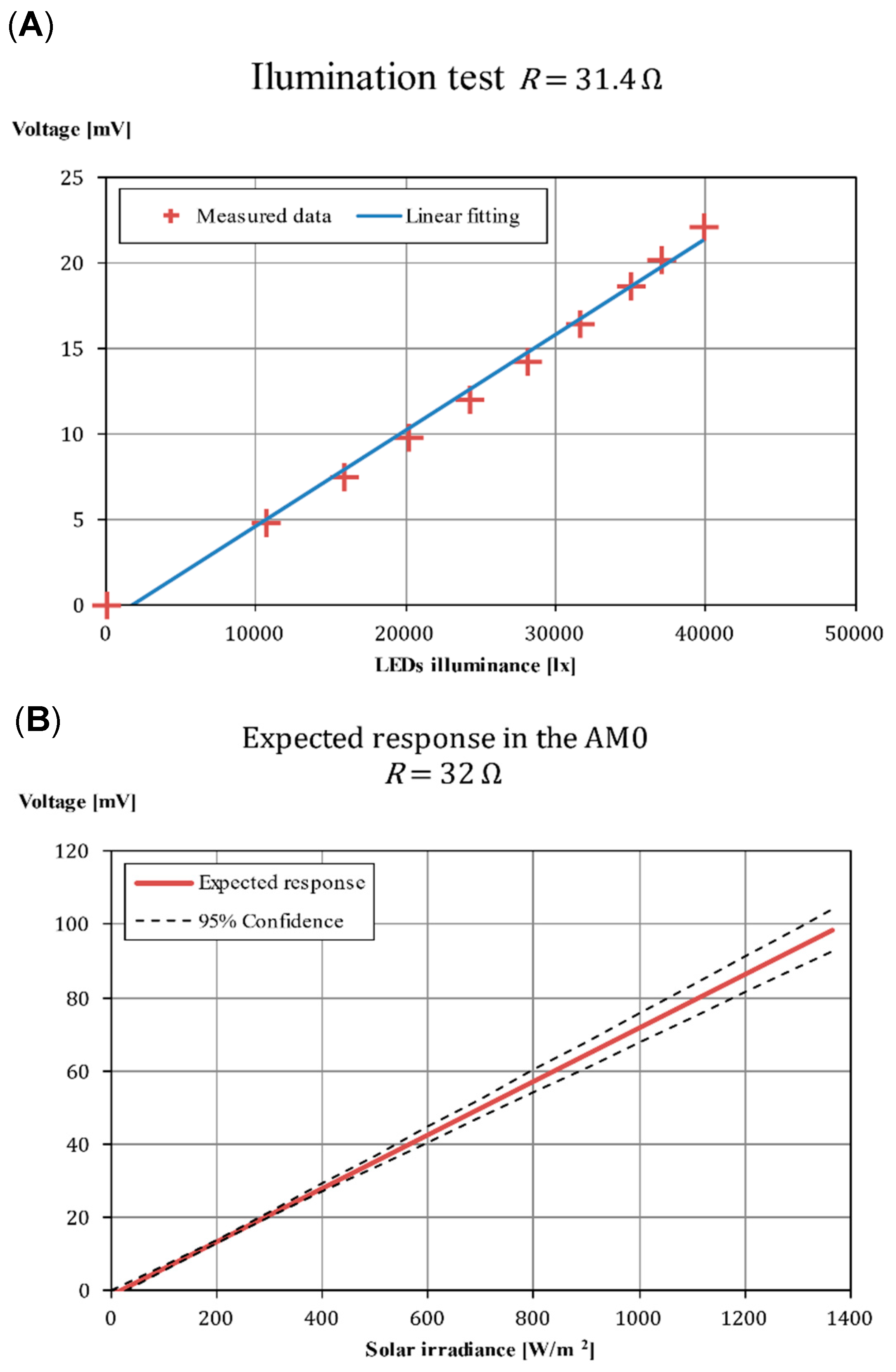
3.1. Illumination Test
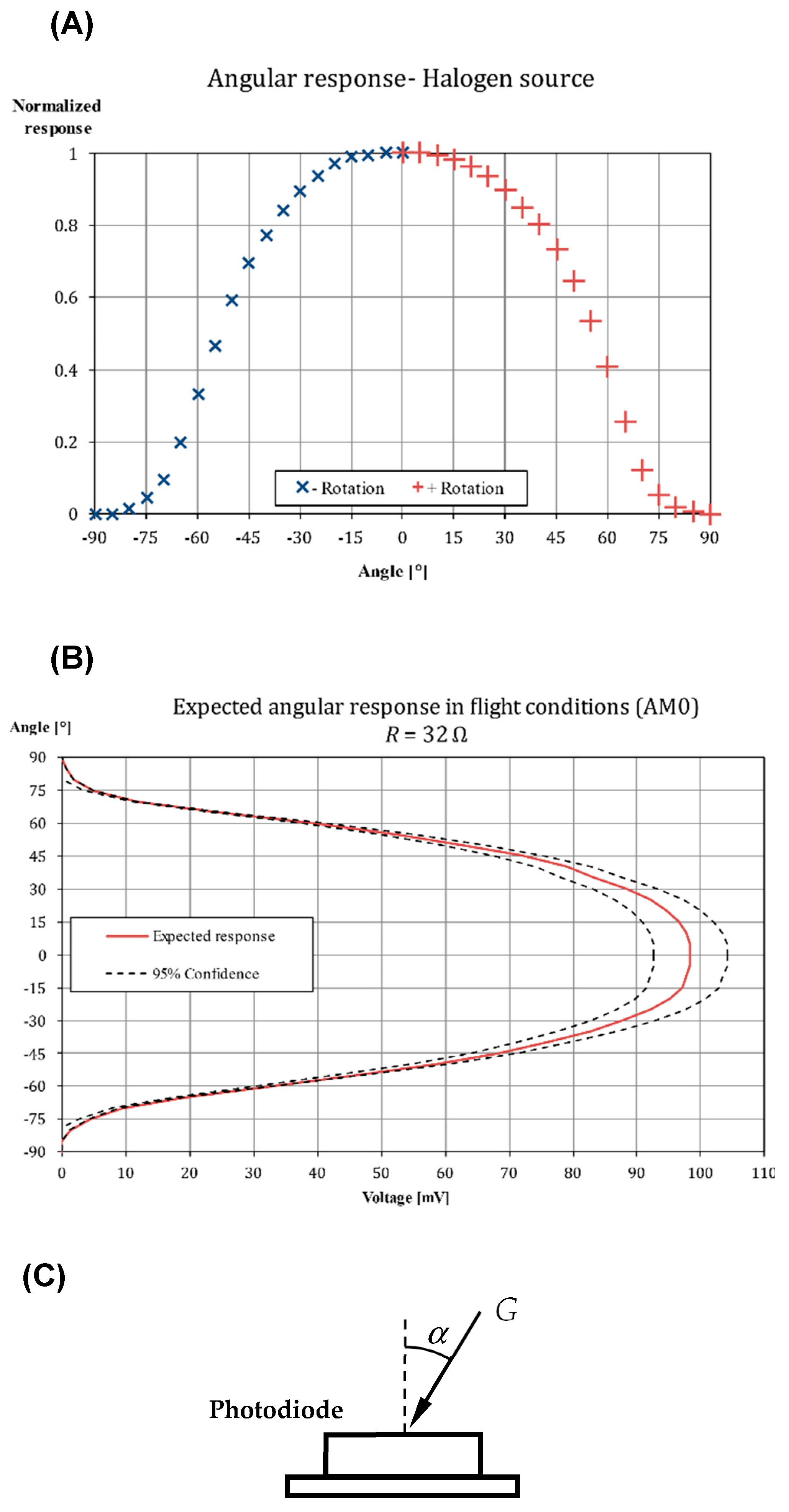
3.2. Angular Response
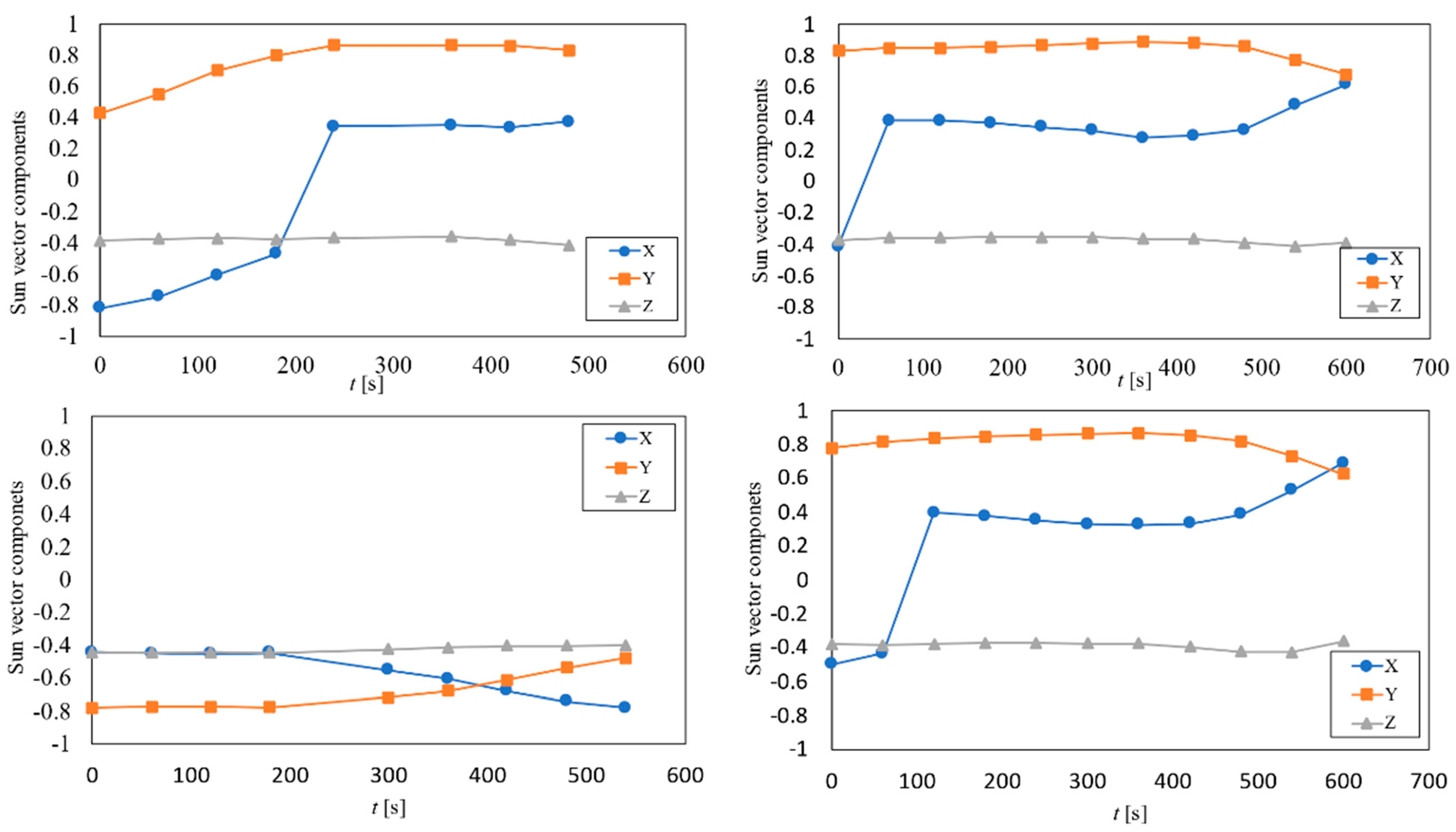
3.3. Sun Direction
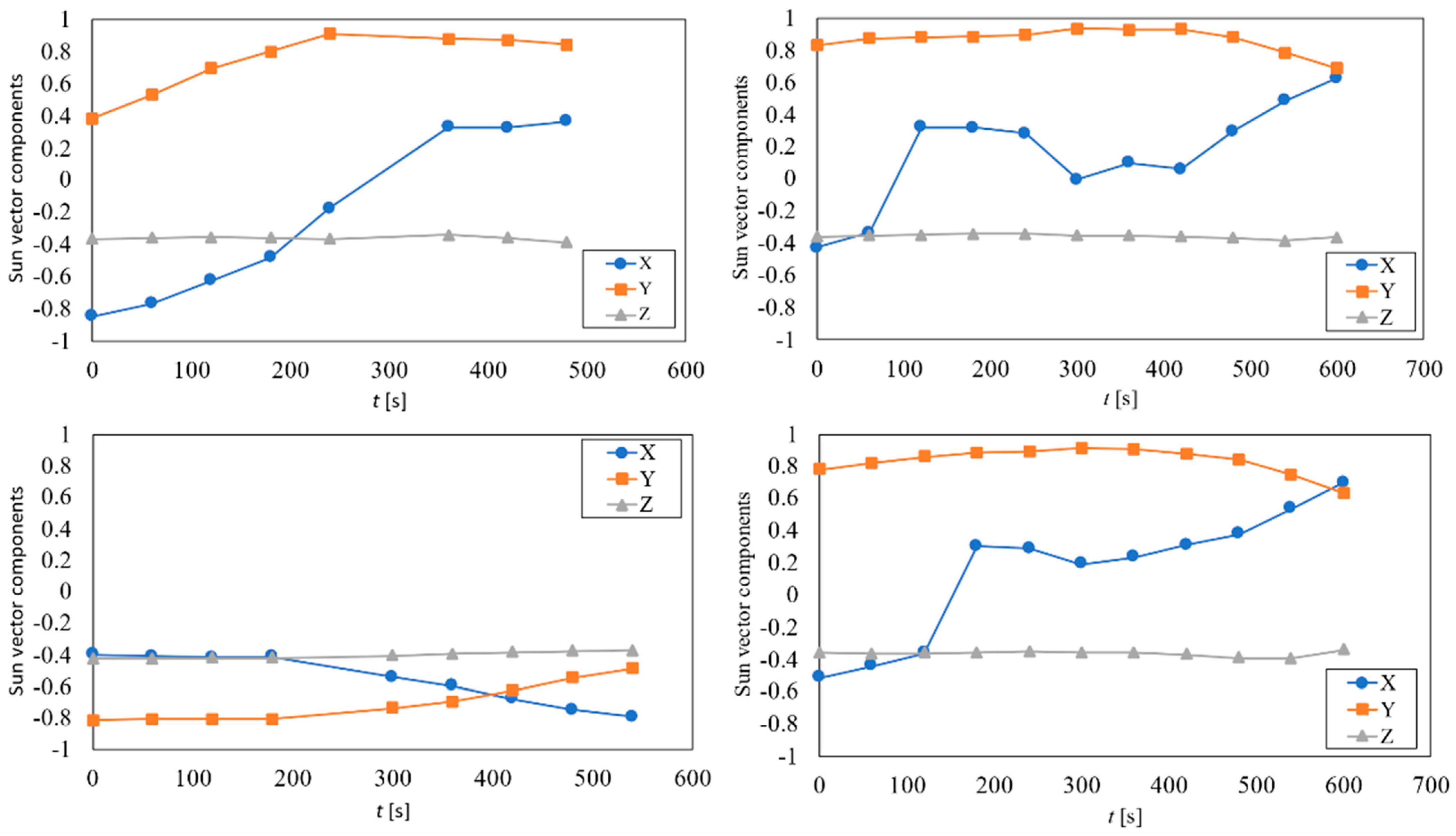
4. On-Orbit Sensors’ Performance
4.1. Results
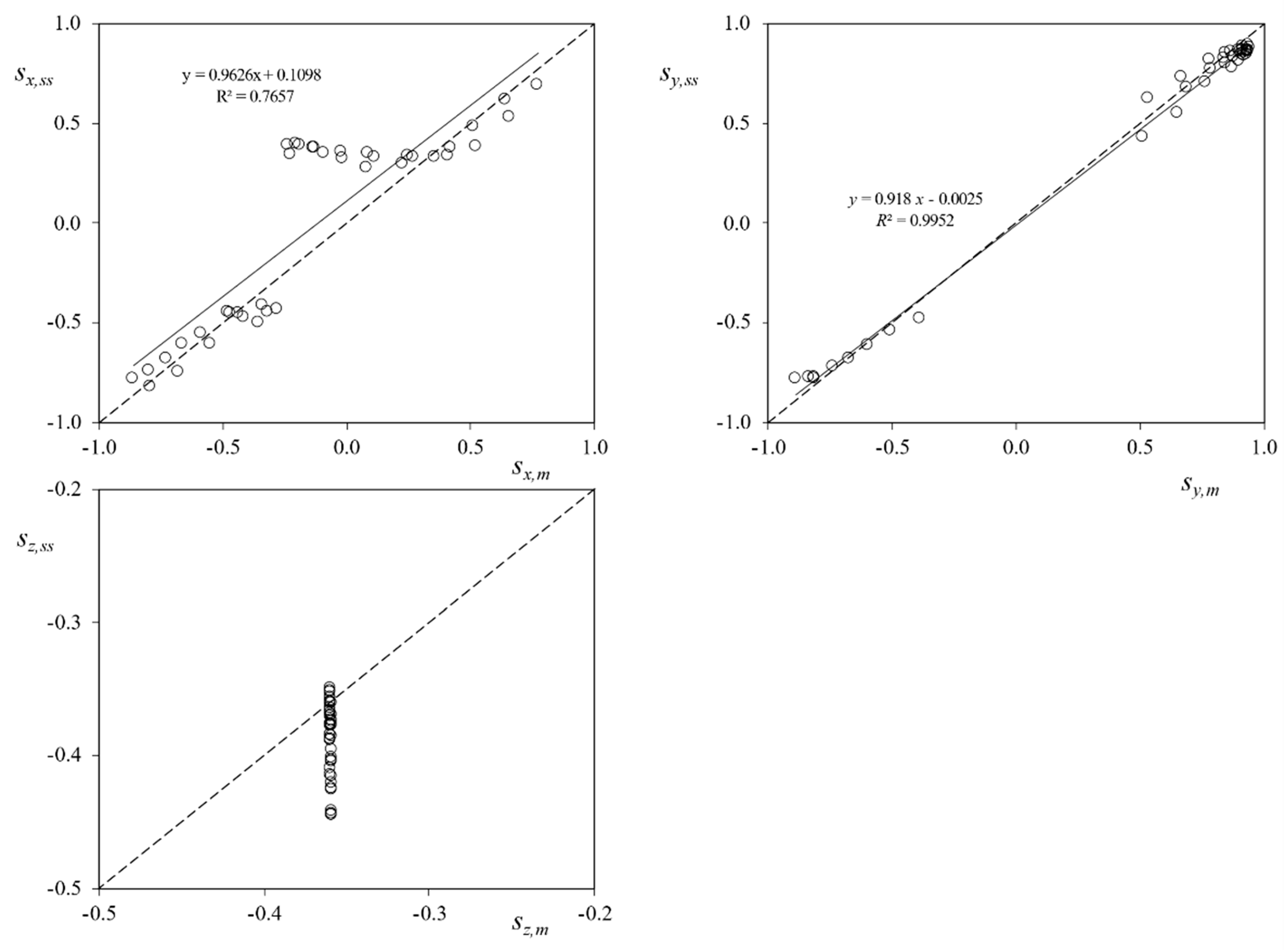
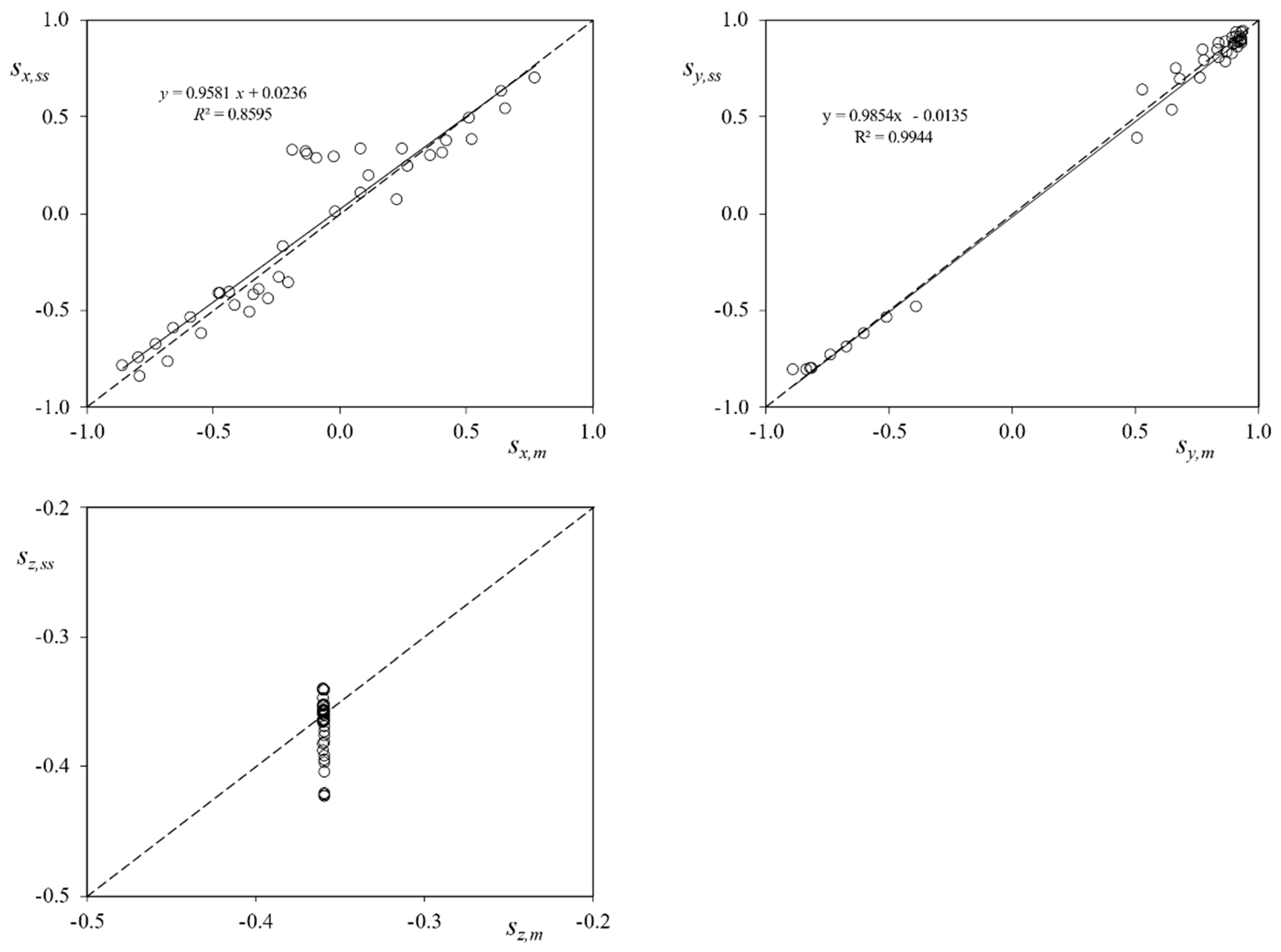
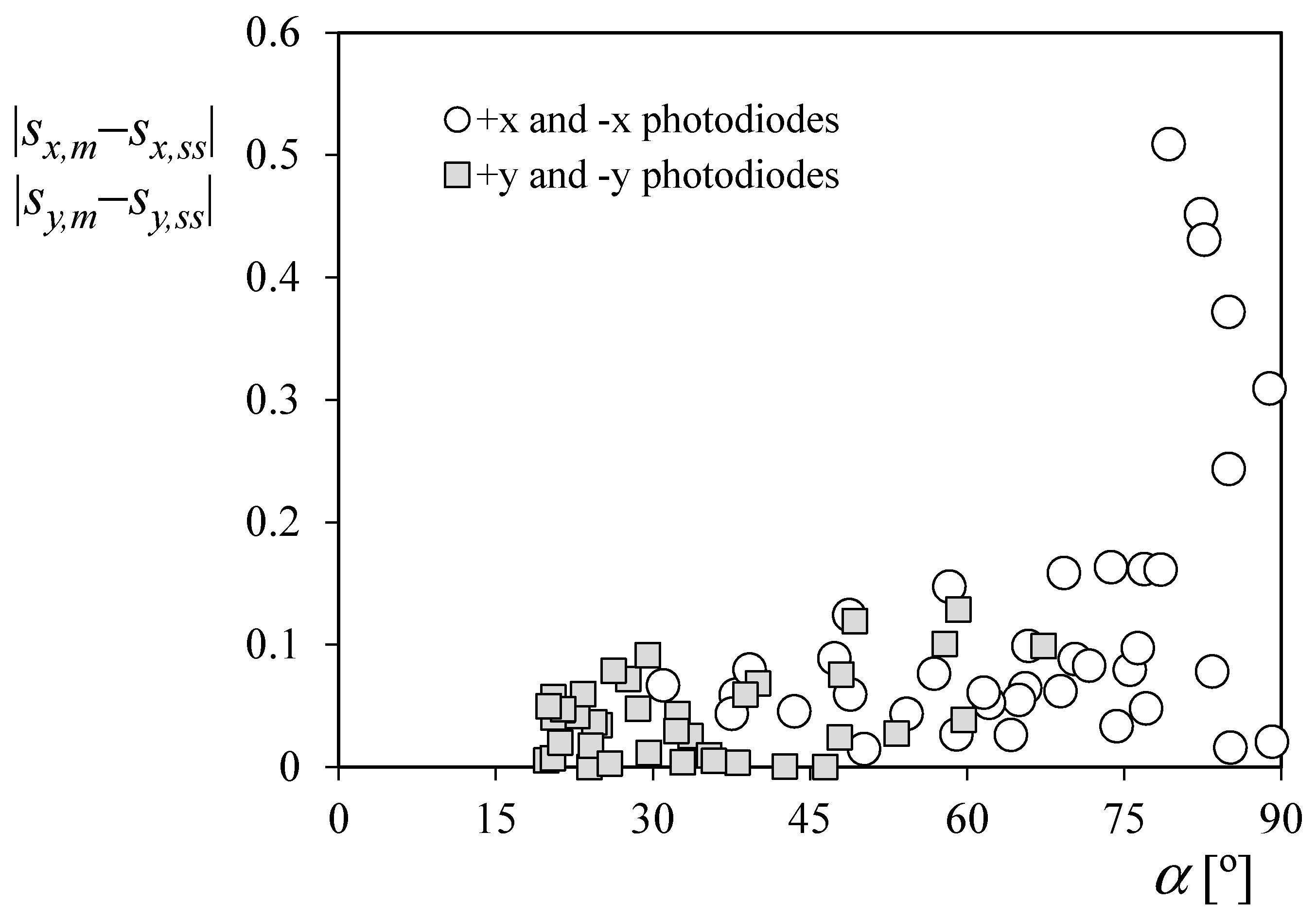
4.2. Validation of the Results
- ∘
- The position of the satellite obtained by orbit propagation from the last TLE data;
- ∘
- The position of the Sun in Earth-Centered Inertial (ECI) coordinates system;
- ∘
- The magnetic field at the position of the satellite, calculated with the International Geomagnetic Reference Field (IGRF) standard;
- ∘
- The magnetic field measured by the UPMSat-2 magnetometers.
5. Conclusions
- The proposed methodology allows the user to determine the expected performance of the photodiodes in the direct polarization zone for any light spectrum without specific material;
- The results of the fitting process indicate a good performance of the photodiodes that compose the sun sensors system for Sun directions within the bracket α ∈ (45°, 75°). Accuracy could be increased by including a thermal sensor in the instrument and characterizing the response for different temperatures;
- The estimation and filtration of the Earth albedo contribution to sun sensors prove to enhance the results obtained being particularly important for angles > 75°;
- Experimental on-flight data have been obtained from the UPMSat-2 first three days of the mission (4th to 6th September 2020). The correlation between the observed coordinates of the Sun direction obtained with the sun sensors and the ones derived from the ADCS magnetometers measurements and orbit parameters indicate high reliability of the solar sensor for angles α < 75°, with poorer performance if this angle tends to α = 0°.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Arianespace. VV16. SSMSPoC Flight. Launch Kit. 2020. Available online: www.arianespace.com/wp-content/uploads/2020/06/VV16-launchkit-EN-new.pdf (accessed on 4 September 2020).
- Pindado, S.; Sanz, A.; Sebastian, F.; Perez-grande, I.; Alonso, G.; Perez-Alvarez, J.; Sorribes-Palmer, F.; Cubas, J.; Garcia, A.; Roibas, E.; et al. Master in Space Systems, an Advanced Master’ s Degree in Space Engineering. In ATINER’S Conference Paper Series, No: ENGEDU2016-1953; Athens Institute for Education and Research, ATINER: Athens, Greece, 2016; pp. 1–16. [Google Scholar]
- Pindado Carrion, S.; Roibás-Millán, E.; Cubas Cano, J.; García, A.; Sanz Andres, A.P.; Franchini, S.; Pérez Grande, M.I.; Alonso, G.; Pérez-Álvarez, J.; Sorribes-Palmer, F.; et al. The UPMSat-2 Satellite: An academic project within aerospace engineering education. In ATINER’S Conference Paper Series, No: ENGEDU2017-2333; Athens Institute for Education and Research, ATINER: Athens, Greece, 2017; pp. 1–28. [Google Scholar]
- Pindado, S.; Cubas, J.; Roibás-Millán, E.; Sorribes-Palmer, F. Project-based learning applied to spacecraft power systems: A long-term engineering and educational program at UPM University. CEAS Space J. 2018, 10, 307–323. [Google Scholar] [CrossRef] [Green Version]
- Cubas, J.; Farrahi, A.; Pindado, S. Magnetic Attitude Control for Satellites in Polar or Sun-Synchronous Orbits. J. Guid. Control Dyn. 2015, 38, 1947–1958. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Rojo, E.; Cubas, J.; Roibas-Millan, E.; Pindado, S. On the UPMSat-2 Attitude, Control and Determination Subsystem ’s design. In Proceedings of the 8th European Conference for Aeronautics and Space Sciences (EUCASS), Madrid, Spain, 1–4 July 2019; pp. 1–14. [Google Scholar]
- Ortega, P.; López-Rodríguez, G.; Ricart, J.; Domínguez, M.; Castañer, L.M.; Quero, J.M.; Tarrida, C.L.; García, J.; Reina, M.; Gras, A.; et al. A miniaturized two axis sun sensor for attitude control of nano-satellites. IEEE Sens. J. 2010, 10, 1623–1632. [Google Scholar] [CrossRef] [Green Version]
- Richie, D.J.; Sobers, D.M. Photocells for Small Satellite, Single-axis Attitude Determination. J. Small Satell. 2015, 4, 285–299. [Google Scholar]
- Pignède, A. Prediction Algorithms for the NUTS Attitude Estimator and Robust Spacecraft Attitude Stabilization Using Magnetorquers. Master’s Thesis, Norwegian University of Science and Technology, Department of Engineering Cybernetics, Trondheim, Norway, 2015. [Google Scholar]
- Abdelwahab, H.; Nawari, M.; Abdalla, H. Maximizing solar energy input for Cubesat using sun tracking system and a maximum power point tracking. In Proceedings of the 2017 International Conference on Communication, Control, Computing and Electronics Engineering, (ICCCCEE), Khartoum, Sudan, 16–18 January 2017; pp. 1–7. [Google Scholar]
- Zhou, K.; Sun, X.; Huang, H.; Wang, X.; Ren, G. Satellite single-axis attitude determination based on Automatic Dependent Surveillance—Broadcast signals. Acta Astronaut. 2017, 139, 130–140. [Google Scholar] [CrossRef]
- ASTM International. Standard Tables for Reference Solar Spectral Irradiances: Direct Normal and Hemispherical on 37 Tilted Surface; American Society for Testing and Materials: Philadelphia, PA, USA, 2008. [Google Scholar]
- Springmann, J.C.; Cutler, J.W. Satellite Attitude Determination with Low-Cost Sensors. J. Guid. Dyn. 2014, 37, 1808–1823. [Google Scholar] [CrossRef] [Green Version]
- Haave, H.R. Simulating Sun Vector Estimation and Finding Gyroscopes for the NUTS Project. Master’s Thesis, Norwegian University of Science and Technology, Department of Engineering Cybernetics, Trondheim, Norway, 2016. [Google Scholar]
- Salgado-Conrado, L. A review on sun position sensors used in solar applications. Renew. Sustain. Energy Rev. 2018, 82, 2128–2146. [Google Scholar] [CrossRef]
- Cubas, J.; Pindado, S.; Victoria, M. On the analytical approach for modeling photovoltaic systems behavior. J. Power Sources 2014, 247, 467–474. [Google Scholar] [CrossRef] [Green Version]
- Cubas, J.; Pindado, S.; de Manuel, C. Explicit Expressions for Solar Panel Equivalent Circuit Parameters Based on Analytical Formulation and the Lambert W-Function. Energies 2014, 7, 4098–4115. [Google Scholar] [CrossRef] [Green Version]
- Pindado, S.; Roibás-Millán, E.; Cubas, J.; Álvarez, J.M.; Alfonso-Corcuera, D.; Gomez-San-Juan, A.M. On the performance of solar cells/panels and Li-ion batteries: Simplified models developed at the IDR/UPM Institute. IEEE Trans. Ind. Appl. 2021, 57. [Google Scholar] [CrossRef]
- Pindado, S.; Roibas-Millan, E.; Cubas, J.; Alvarez, J.M.; Alfonso-Corcuera, D.; Cubero-Estalrrich, J.L.; Gonzalez-Estrada, A.; Sanabria-Pinzon, M.; Jado-Puente, R. Simplified Lambert W-Function Math Equations When Applied to Photovoltaic Systems Modeling. IEEE Trans. Ind. Appl. 2021, 57, 1779–1788. [Google Scholar] [CrossRef]
- Gomez-Sanjuan, A.M.; Cubas, J.; Pindado, S. On the thermo-electrical modeling of small satellite’s solar panels. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1672–1684. [Google Scholar] [CrossRef]
- DELTA Ohm. DELTA Ohm HD2102.2 Luxmeter Manual; DELTA Ohm: Padua, Italy, 2010. [Google Scholar]
- OSRAM. Opto Electronics OSRAM BPX 61 Datasheet; OSRAM: Munich, Germany, 2012. [Google Scholar]
- Balenzategui, J.L. I-V characterization of solar cells with variable intensity monochromatic light. In Proceedings of the 23rd European Photovoltaic Solar Energy Conference and Exhibition, Valencia, Spain, 1–5 September 2008; pp. 513–516. [Google Scholar]
- Cubas, J.; Gomez-Sanjuan, A.M.; Pindado, S. On the thermo-electric modelling of smallsats. In Proceedings of the 50th International Conference on Environmental Systems (ICES 2020), Lisbon, Portugal, 12–16 July 2020; pp. 1–12. Available online: https://hdl.handle.net/2346/86449 (accessed on 4 September 2020).
- O’Keefe, S.A.; Schaub, H. Sun-direction estimation using a partially underdetermined set of coarse sun sensors. J. Astronaut. Sci. 2014, 61, 85–106. [Google Scholar] [CrossRef]
- ESA. ECSS-E-ST-10-04-C. Space Envioronment; ESA: Noordwijk, The Netherlands, 2008.
- Rodríguez-Rojo, E.; Pindado, S.; Cubas, J.; Piqueras-Carreño, J. UPMSat-2 ACDS magnetic sensors test campaign. Measurement 2019, 131, 534–545. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RL (Ω) | Illuminance: 88,500 lx | Illuminance: 47,000 lx | ||
|---|---|---|---|---|
| Test 1 (mV) | Test 2 (mV) | Test 1 (mV) | Test 2 (mV) | |
| 10.0 | 13.2 | 13.7 | 7.4 | 7.3 |
| 55.6 | 74.2 | 76.6 | 40 | 40.8 |
| 98.8 | 132.5 | 132.5 | 73.5 | 72.1 |
| 216.8 | 280.9 | 286.7 | 159.2 | 160.4 |
| 264.0 | 329.5 | 328.3 | 192.9 | 193.7 |
| 548.2 | 434 | 435 | 343.2 | 347.3 |
| 994.2 | 462 | 461 | 411 | 410 |
| 2148 | 477 | 480 | 441 | 441 |
| ∞ | 492 | 488 | 459 | 461 |
| Parameter | Fitted Value |
|---|---|
| P (Am2/W) | 5.56·10−6 |
| I0 (A) | 1·10−10 |
| a | 1.1754 |
| Rs (Ω) | 34.01 |
| Rsh (Ω) | 4902 |
| Irradiance | M | n |
|---|---|---|
| LED | mV/lx | −0.992 mV |
| AM0 | mV/(W/m2) | −1.01 mV |
| Sun Sensor | a0 | a1 | a2 | a3 | a4 | a5 | a6 | a7 |
|---|---|---|---|---|---|---|---|---|
| SS1-X+ | 1.663 | –10.07 | 91.45 | –427.5 | 1066 | –1449 | 1011 | –283.5 |
| SS1-Y− | 1.712 | –14.01 | 133.5 | –625.7 | 1547 | –2072 | 1420 | –390.6 |
| SS1-Z+ | 1.679 | –11.08 | 101.9 | –480.1 | 1212 | –1672 | 1184 | –336.9 |
| SS2-X− | 1.779 | –17.66 | 166.7 | –737.4 | 1714 | –2171 | 1418 | –374.9 |
| SS2-Y+ | 1.677 | –10.05 | 92.2 | –444.6 | 1146 | –1609 | 1158 | –334.7 |
| SS2-Z− | 1.731 | –15.49 | 146.2 | –663.5 | 1599 | –2108 | 1434 | –393.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Porras-Hermoso, A.; Alfonso-Corcuera, D.; Piqueras, J.; Roibás-Millán, E.; Cubas, J.; Pérez-Álvarez, J.; Pindado, S. Design, Ground Testing and On-Orbit Performance of a Sun Sensor Based on COTS Photodiodes for the UPMSat-2 Satellite. Sensors 2021, 21, 4905. https://doi.org/10.3390/s21144905
Porras-Hermoso A, Alfonso-Corcuera D, Piqueras J, Roibás-Millán E, Cubas J, Pérez-Álvarez J, Pindado S. Design, Ground Testing and On-Orbit Performance of a Sun Sensor Based on COTS Photodiodes for the UPMSat-2 Satellite. Sensors. 2021; 21(14):4905. https://doi.org/10.3390/s21144905
Chicago/Turabian StylePorras-Hermoso, Angel, Daniel Alfonso-Corcuera, Javier Piqueras, Elena Roibás-Millán, Javier Cubas, Javier Pérez-Álvarez, and Santiago Pindado. 2021. "Design, Ground Testing and On-Orbit Performance of a Sun Sensor Based on COTS Photodiodes for the UPMSat-2 Satellite" Sensors 21, no. 14: 4905. https://doi.org/10.3390/s21144905