1. Introduction
The biomechanical study of human movement requires a strict integration between experimental data and models to describe motion patterns [
1,
2]. Moreover, when dealing with physical parameters that cannot be directly measured, a model-based inverse-dynamics problem has to be solved, which requires the measurement of kinematic quantities, including position, velocity and acceleration of reference points, as well as angular displacement and relative derivatives of body limbs.
State-of-the-art measurement systems for kinematic analysis in biomechanics include video or inertial sensors. In the first scenario, a preliminary calibrated video system is used to measure the position in the two or three-dimensional space, according to gesture’s space development (2D measures can fit sufficiently some gestures, while others are intrinsically 3D). The video shows a set of reference markers on the subject corresponding to very evident dots with respect to the background. Experimental signals resulting from the measurements are positions. The second scenario is composed of an inertial measurement unit (IMU), consisting of accelerometers, gyroscopes and magnetometers, placed on the body segment, measuring its orientation in the space. Experimental signals resulting from the measurements are angles. In both scenarios, some noise affects the measurements, mainly due to electronics and processing of the IMU signals, or to illumination, fast movements, camera resolution and focus in the video scenario [
3].
To obtain velocities and accelerations from position and angle measurements, a differentiation process and low pass filtering is necessary. Filter selection and setup are critical because noise might affect numerical derivatives [
4,
5].
For this reason, differentiation procedures and their characterization has been analyzed from several points of view in literature. Regarding specific biomechanics’ application, three frequently used approaches to differentiation can be identified: (1) numerical differentiation followed by low pass filtering, (2) polynomial local approximation and direct differentiation, and (3) optimal Fourier filtering.
As regards the first Approach, several papers available in literature investigating low pass filtering performances [
6] by comparing filtering results to standard gait patterns, with and without added noise, or introducing simulated gait patterns as reference [
7,
8,
9]. The effectiveness of such studies is limited by the need to adapt filters’ setup to the specific signal and to the considered derivative order.
The consistency of the polynomial approach with the model and its degrees of freedom is considered by [
10,
11,
12] addressing the effect of differentiation methods on modelling, and on its use in inverse dynamics analysis results. Numerical differentiation methods are compared to an experimental reference signal from a worn accelerometer in [
13] introducing an experimental reference signal.
The Fourier approach bases on biomechanical signal spectral content to identify a convenient filter bandwidth. Such approach presents a good performance with the burden of heavier computation. An interesting compromise is discussed in [
14,
15,
16,
17] optimizing the spectral reconstruction of the biomechanical signal for successive analytical differentiation.
Polynomial interpolation was increasingly adopted in biomechanics following Savitzky and Golay’s computational efficient procedure [
1,
18,
19]. Such an approach presents the advantage to obtaining the analytical differentiation, point by point, considering the interpolating polynomial. On the other hand, the polynomial filter set up is not straight forward due to nonlinear behavior [
20].
It is worth noting that the majority of the papers consider the differentiation problem applied to gait one of the most studied human gesture in biomechanics. Interesting different developments in biomechanical studies include a variety of upper limbs sports gestures including ergonomic studies in human–machine interaction [
21] or repeated movements in working activities [
22]. A general approach addressing measurement uncertainty contribution due to the differentiation process seems to be appropriate.
Most literature considers rms errors between reference and numerically differentiated signals as differentiation/filtering performance indicators. In order to fulfill constraints of different biomechanical applications, specific performance indicators are required. Rms error, the most common in literature, is a good general indicator applied to the analysis or modelling of an overall, rather slow, gesture such as gait. In sports acceleration, peaks might be essential to characterize or optimize gesture performance, and their values heavily influence the measurement of articular forces and moments through an inverse dynamic model.
The energetic analysis is another aspect to consider, since it can be influenced by differentiation errors. When only short acquisitions are available, border effects might be dominant. Such effects, which are of great importance when using numerical filtering, are rarely analyzed [
23,
24,
25]. Except for Fourier methods, differentiation by filtering is based on a processing window in which borders can show an abnormal behavior, due to the filter action. This may be eliminated when long sequences of a repetitive (periodic) gesture are available, but it highly impacts those cases in which a record of a single gesture is available. In such cases, specific performance indicators are needed to characterize the differentiation/filtering procedure, and a rough indication of the possible differentiation error is indispensable when comparing results from different experiments, or a result from a trial with a normality range.
The purpose of this work is to propose a possible evaluation scheme, to better understand filter performance according to the above limits discussed regarding the existing proposed methods. We consider both signal and its derivatives, by using an analytic reference signal and a set of experimental test cases [
26]. The use of an analytical reference signal makes possible the evaluation of measurement uncertainty, giving useful indications on the reliability of the obtained values. Tests cases will cover specific aspects illustrated above.
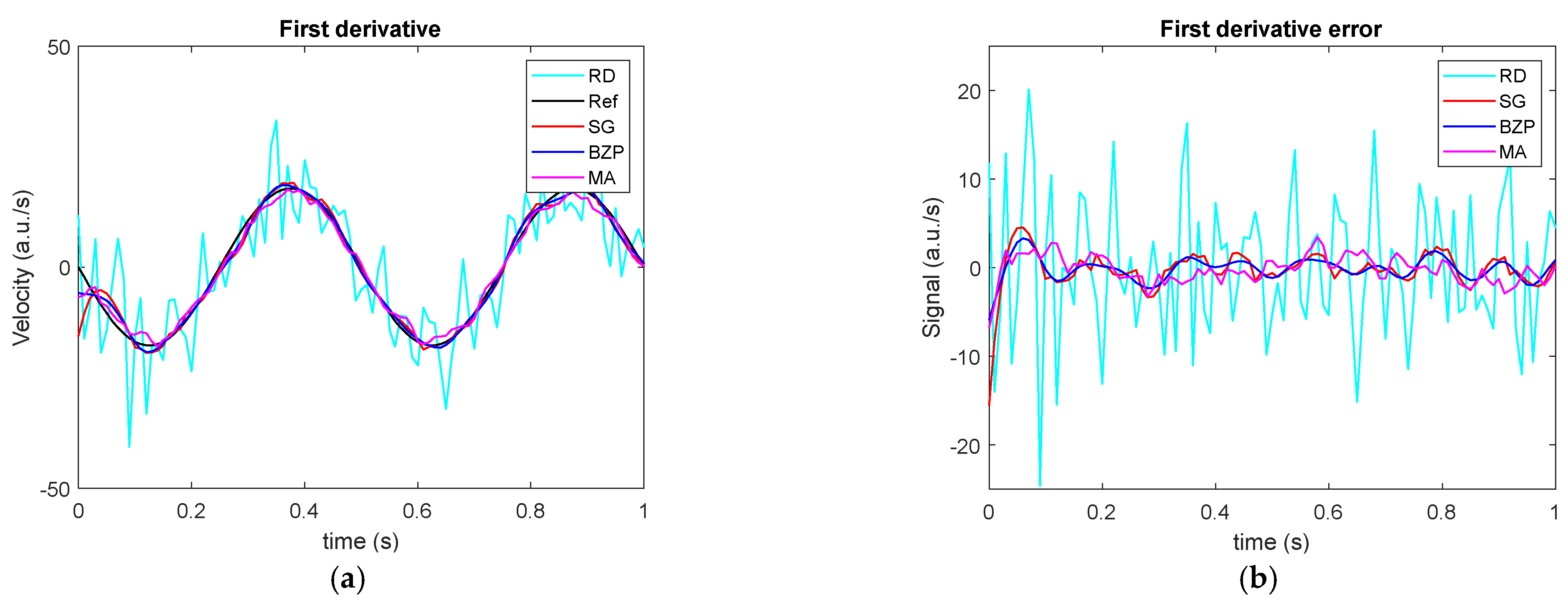
The set of selected filtering methods will be discussed, critically analyzing their main features. A reference signal, with added random noise, is adopted, where derivatives are analytically computed to become the reference. Performance evaluation will consider both uncertainty on the filtered signal, in terms of signal to noise ratio, and transient performance on signal and its derivatives.
Some practical indications for selecting and defining the most convenient parameters of the filter are supplied when discussing performance criticalities of analyzed cases. As a last step, a few experimental test cases are described as samples of possible application.
2. Materials and Methods
Low pass filtering in biomechanics can be used in both kinematic and kinetic experimental data. In the former case, as already depicted, we can identify two main goals signal to noise ratio improvement and differentiation. In the latter, the main advantage is to reduce noise contribution in force measurements, in order to use such information in inverse kinetics procedures.
In both cases, common cut off frequencies are in the range between 3 and 10 Hz [
1] with values around 6 Hz, such as in the biomechanical simulator OpenSim [
27,
28] default parameters.
In this paper, the cut off frequency is 10 Hz which represents all the considered experimental test cases’ bandwidth and most biomechanics’ applications range.
2.1. Differentiation and Filtering Methods
Numerical differentiation in biomechanics is usually carried out according to the method proposed by Winter and available in [
1]. Winter method considers, for each sample, a mean of the finite differences with both previous and following samples. A low pass filtering is added to reduce noise effects. In some cases, before differentiation, a low pass filtering is preliminary applied to improve signal to noise ratio (SNR). Several low pass filtering methods are available in literature, in the following we will focus on:
Let us the briefly introduce and discuss these three methods.
2.1.1. Moving Average (MA) Filters
Although its frequency response is not as performing as for other filter types, this filtering method is amply used thanks to its intuitive behavior. It is based on an average window, whose time duration determines its bandwidth, and the consequent number of points to be averaged is determined by the sampling frequency. When short windows are involved, together with slow sampling rates, the limitation associated with the minimum number of three points, becomes critical.
The window is usually based on an odd number of samples: 2M + 1, with M positive integer, causing a transient behavior when the filter is applied to signal record’s extremities, affecting M samples after start and before the end. Such effects are particularly evident when dealing with derivatives. Special smoothing windows, such as Hanning, might be used to obtain a weighted moving average filter, smoothing transient effects but altering filter bandwidth. In the following we will consider a window length, for the MA filter, with cutoff frequency at 10 Hz.
2.1.2. Linear Filter
Among linear filters, the Butterworth filter is very common in filtering biomechanical signals [
1,
2,
30,
31]. After a proper design to obtain the desired cut off frequency, the filtering is generally applied two times, in forward and reverse directions on the signal time history, to obtain a zero-phase filter.
In the following, we will consider a second order 10 Hz cut off Butterworth filter, applied two times to the time series, obtaining a frequency response of fourth order. The Fourth order is typical for biomechanical application as depicted in [
1].
As in the previous case, linear filtering presents a transient behavior dependent on filter set up.
2.1.3. Polynomial Filter
Savitzky–Golay, SG, is a polynomial filter, whose parameters are determined by least square procedure, on a window of points centered on the point of interest [
30,
31,
32,
33,
34,
35]. The filter set up requires specification of the polynomial order and of the number of points in the window. This filter is similar to the MA filter, since it uses a zero-th order polynomial, or average, fitted on a moving set of samples as defined by window length. However, SG has a nonlinear behavior, since it operates at higher orders, so bandwidth analysis and filter set up is not trivial. Cut off frequency depends on both order and window length and the same bandwidth can be achieved with different combinations, highly affecting transition band behavior. A SG filter introduction, giving useful frequency cut off and bandwidth indications is available in [
20].
The main advantage of this method, from the point of view of biomechanical motion analysis, is that once polynomial coefficients have been determined in a point, the signal derivatives are obtained by analytical derivation, therefore, avoiding numerical derivative procedures. This advantage often overcomes the difficulties in setting up a proper filter for noise reduction. We have selected a fourth order SG filter, as widely used in biomechanics, and to determine the proper window length we used reference [
20]. Form this reference it is possible to identify an empirical relationship between order, window length and cut off frequency. We are interested in obtaining the same MA and BZP cut off frequency, by using a fourth order SG filter, so we are constrained to window length selection. To this purpose we have considered data in [
20], using both graphical presentations and tables, to reconstruct the cut off frequency to window length empirical relation depicted in
Figure 1.
The curve near 10 Hz is rather flat including different possible lengths, some preliminary tests were necessary to verify filter bandwidth considering amplitude reduction. We have tested windows of 15–17-and 19 samples (7–8 and 9 samples on
Figure 1) to identify the 17 points window, as the nearest to the 10 Hz cut off.
2.2. Reference Analytical Signals
In order to compare filters performance on signal and its derivatives, we need a reference analytical signal. We propose here to consider a pure harmonic signal, defined considering frequencies involved in some typical biomechanical investigations, such as gait and hopping analysis.
In the latter case, a typical protocol considers the most preferred hopping frequency of 2.2 Hz, which is set by a metronome, to ensure a stable gesture repetition [
36,
37]. In walking studies, generally the step pace is about 2 Hz. Some harmonics has to be considered in the measurement set up, leading to a frequency band of about 5 ÷ 10 Hz [
1].
We have generated time histories of the reference signal and its derivatives from the analytical definition with a sampling frequency of 100 Hz, which is compatible with most biomechanical data acquisition systems. Of course, it is possible to investigate different parameters configuration both for sampling and fundamental frequency.
Some noise is added to the analytical reference to better simulate the experimental situation. This noisy signal , sampled at 100 Hz, will be the test signal input for the filters we are considering.
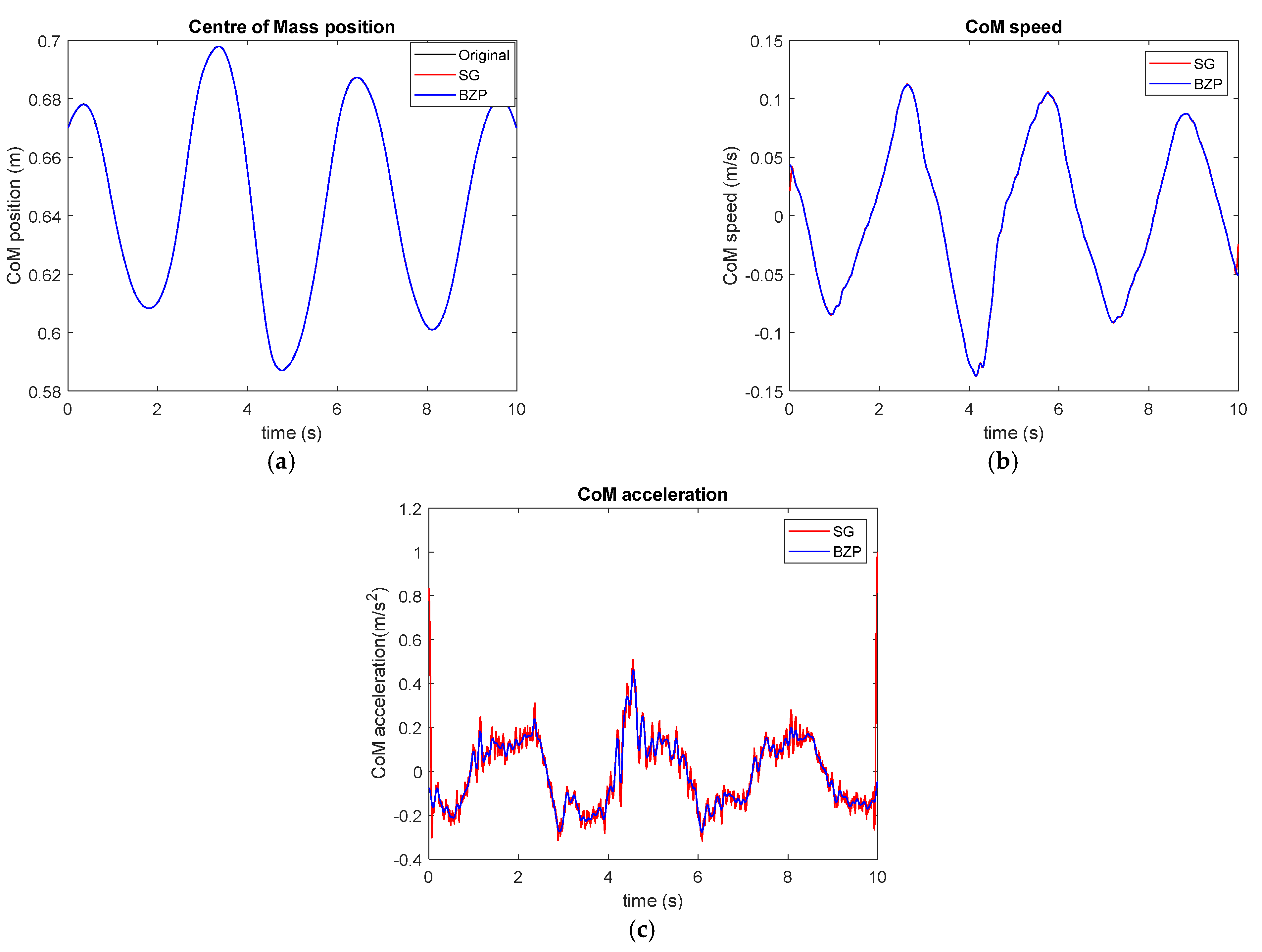
2.3. Experimental Test Cases
Once filters are characterized by considering the analytical reference signal and the performance parameters presented in the following
Section 2.4, it will be possible to apply the same methods to some experimental test cases which are typical for the biomechanical application we are considering. We will consider kinematic measurements of different gestures:
2.4. Test Procedure
Once the analytical signal has been generated together with its first and second derivatives, at the required sampling frequency, some noise is added to the original signal, before entering the processing phase, as reported in
Table 1.
Analytical signal offers a reference for both time signal and its derivatives. After noise addition, it is possible to numerically differentiate the signal, by using, for example, the method recommended by Winter in [
1]. This method proceeds point by point along the signal history, considering an average of the numeric differences obtained with previous and successive points.
Raw results are then filtered according to the procedures depicted in
Figure 2:
MA and BZP filters are applied to the signal. Then the filtered signal is differentiated and filter is applied again. First derivative is differentiated again and MA/BZP filters are applied. Hence each differentiation order n is filtered n + 1 times.
Such numerical differentiation and filtering procedures are not required in the SG case, since one of its peculiar advantages is the possibility to obtain derivatives directly from the polynomial coefficients.
Table 2 presents filters parameters that we have considered in this study.
Once we have obtained filtered signals and their derivatives, we can evaluate performance indicators by considering their difference with the reference analytical signal.
2.5. Performance Indicators
Since we rely on an analytical reference, a performance indicator may be developed starting from the point-by-point difference between signal and its derivatives, obtained after differentiation and filtering procedures, with the corresponding references. This can be considered as an estimation of the measurement error, since the reference simulates the measurand and the signal is the output of the measurement procedure. In order to have an overall synthetic parameter, it is possible to consider the rms error value, calculated on all recorded time history, or all available
samples.
This gives us an absolute picture of the situation that can be normalized to the analytical rms reference,
, giving a figure of the overall relative error.
The same relative approach can be expressed as a signal to noise ratio, SNR, which is perhaps more informative as regards signal processing. Such overall evaluation fails in identifying specific aspects such as transient behavior at time history extremes and the eventual error on signal peaks.
Transient behavior is important when dealing with limited in time signal histories, for example a single gait recording. In such cases, border effects could be higher than in the central part, so a quantification of the border error according to (3) could be useful to optimize the filter and evaluate the uncertainty in these specific parts.
considers rms error only in the first and last filtering windows, , in the time history recording. The border error is then normalized following the same principle as in (2) to obtain .
Peak level evaluations are required in some gestures, commonly in sports investigations, for example acceleration peaks during a jump. In such cases, an overall error evaluation is not sufficient, and we need a specific performance indicator. A certain number
of peaks are identified in the analytical reference absolute value obtaining their positions,
and levels,
. Then peak levels are averaged obtaining a reference for the peak value.
Rms difference between peak levels in the same positions
, for reference and filtered signals is evaluated:
Finally, the ratio between error and reference level gives the dynamic performance indicator in %:
Figure 13 presents graphically the zones of the time signal interested by performance indicators.
Now we are going to apply the performance indicators summarized in
Table 3, to:
The signal itself evaluating only the low pass filtering effect, and;
Its first and second derivatives.
4. Discussion
The introduction of a reference signal and its analytical derivatives enables a quantitative evaluation of numerical differentiation procedures. For this purpose, we considered a set of error parameters for specific aspects of the signal and its derivatives: overall error, error in recording borders, error on the peaks, as presented in
Figure 13. A parameter can be selected according to the objectives of the biomechanical analysis that is carried out and consequently an estimation of the possible error due to the differentiation/filtering procedure is possible. For example, a general analysis of a periodic gesture may require a general error evaluation and some indications of possible border effects. If the acquisition is rather short and the gesture starts very near recording border the border error can give useful information. If the interest is on peaks, (for example, acceleration peaks in sports gestures), the peak error is the most suitable parameter.
Even if in typical biomechanical applications, kinematic signal processing is off-line and does not require particularly fast computation, each method requires a suitable and efficient implementation, however, using the standard algorithms available for example in Matlab®, the computation time is limited to few milliseconds for a 2.5 s signal and its derivatives, for all of the methods.
When evaluating measurement uncertainty, the instrumental effects are significant [
3] but when dealing with biomechanical models, other contributions should be considered [
39] and, among them, the differentiation and filtering procedure might be important. The proposed approach gives an estimation of possible errors according to the selected filtering procedure.
An evaluation of the errors for the simulated signals at 2 and 5 Hz and the three differentiation orders considered, shows that:
When a time signal filtering is considered Butterworth and polynomial filters have almost the same performance in the three areas, moving average is acceptable, even if slightly less efficient;
When considering derivatives, the moving average filter is less performing than the others, but its performance is almost unvaried between 2 and 5 Hz and for differentiation order, hence this approach shows to be simple and robust;
In first and second differentiation, Butterworth has a more stable behavior with respect to frequency and in general, it shows a better performance in the borders if compared with polynomial methods. Performance on peak level measurement is acceptable and robust.
The Savitsky–Golay filter seems to improve its performance in first and second derivatives, by increasing the reference frequency from 2 to 5 Hz. The differences in performances create some difficulties for uncertainty evaluation when the frequency content of the signal is not “a priori” known.
It is worth noting that in this study, a similar set up for all the filters was considered. The different performance of the Savitsky–Golay polynomial filter for 2 and 5 Hz, might indicate that a specific tuning is required. Such a tuning is not simple to design a priori, it would require a strict frequency band of interest and might require several attempts. On the other hand, Butterworth filtering is much simpler to tune, moreover, it is robust enough to perform in an acceptable way for all the differentiation orders for the considered frequencies, and in all areas of interest. According to the proposed evaluation frame, it seems the best choice. Our evaluation limits are due, for example, to the pure harmonic reference signal. A further step might include simulation of more complex signals maintaining the possibility to have a reference analytical derivative. As regards the filter setup, we can suppose that a filter specific tuning, might improve performance, but it would change the evaluation frame that in this paper considers the same order and cutoff frequency for all the filters. While, as in regards to filter type, the proposed approach can be used to evaluate other differentiation and filtering procedures or application of pre-treatments, such as the Hanning smoothing windows in the moving average filter, to limit border effects.
In general, this work defines a basic evaluation procedure and supplies the biomechanical experimenter some useful indication, to evaluate uncertainty contributions due to differentiation and filtering of biomechanical signals.
5. Conclusions
The three low pass filtering procedures—moving average, Butterworth, and polynomial, applied to differentiation of biomechanical signals have been studied considering both as a simulated reference and experimental kinematic signals.
Beside the rms error, we have introduced other performance parameters focusing on error on the peak values, as well as border errors.
In order to compare filter performance, a standard set up for all the methods was considered, as illustrated in
Table 2. With such constrains, it emerges that the Butterworth zero phase low pass filter presents the most robust performance in all differentiation conditions. Savitsky–Golay polynomial filtering is valid, but it presents different performances at different frequencies. To improve its performance, it requires fine tuning depending on both derivative order, signal type and frequency, and the objective of the analysis.
Moreover, the reference signal has enabled a quantification of the differentiation contribution to the measurement uncertainty for a differentiated signal such as velocity or acceleration. Uncertainty contribution are defined according to the considered parameters, for the signal in general, for the signal’s borders, or for peak value evaluation.
Further experimentation will be based on more complex simulated signals considering different filters setups.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}