
A Novel Acceleration Signal Processing Procedure for Cycling Safety Assessment

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Problem Statement and Methodological Approach
- What equipment can provide suitable measures and data?
- How to account for the noise induced in the sensor’s signals?
- What ride analytics are informative to identify critical events?
2. GPS Data and Cycling
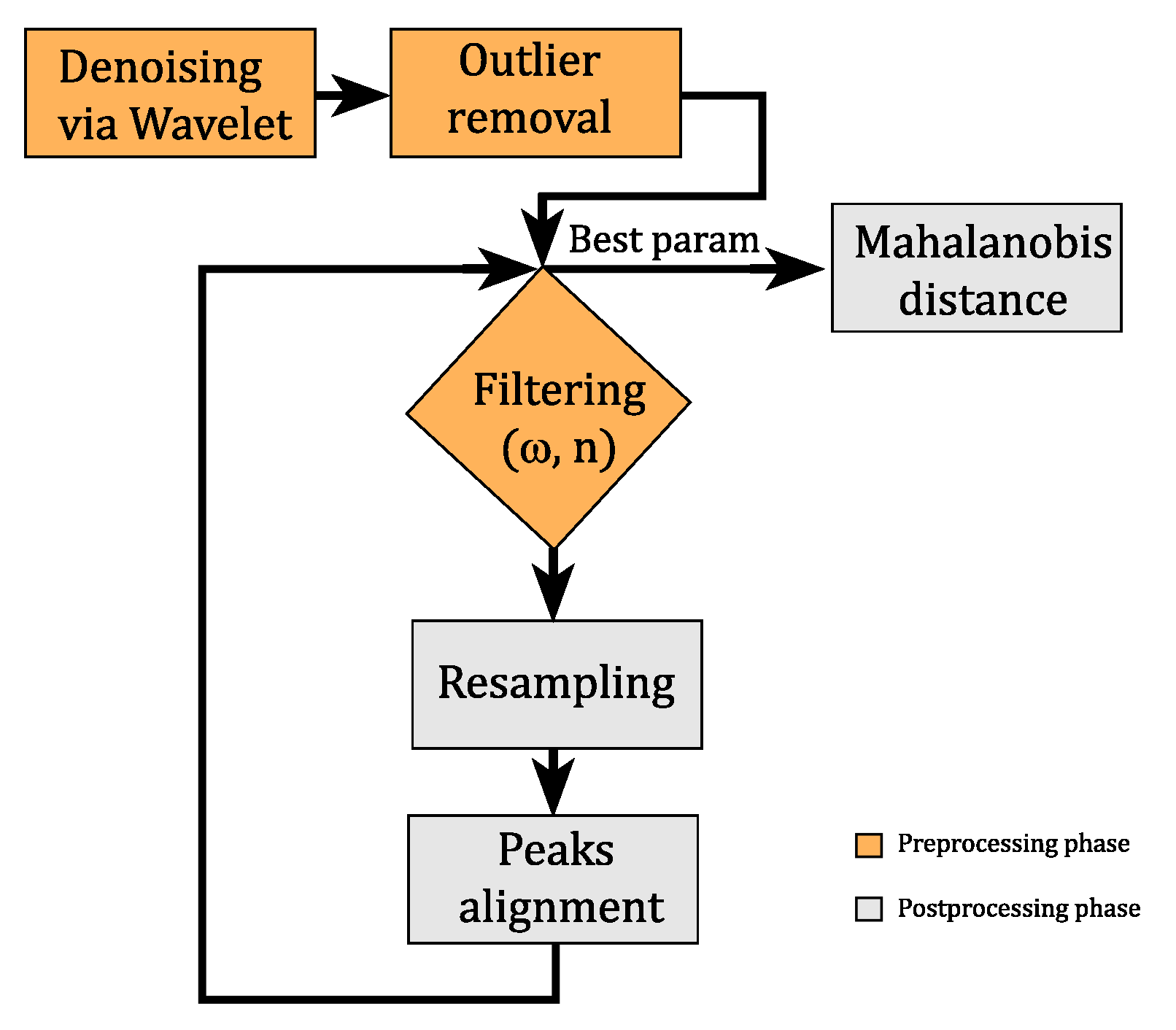
3. Materials and Methods
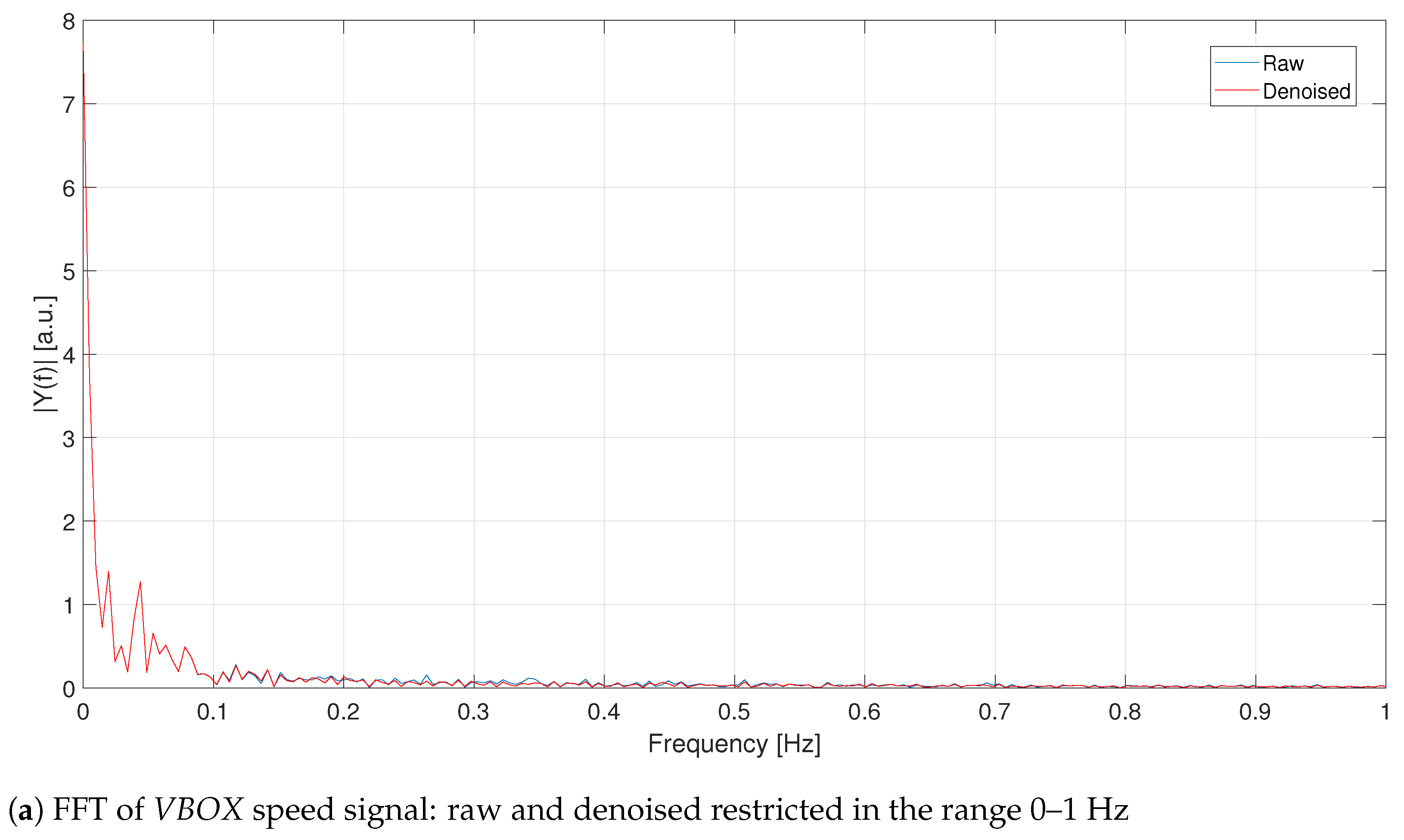
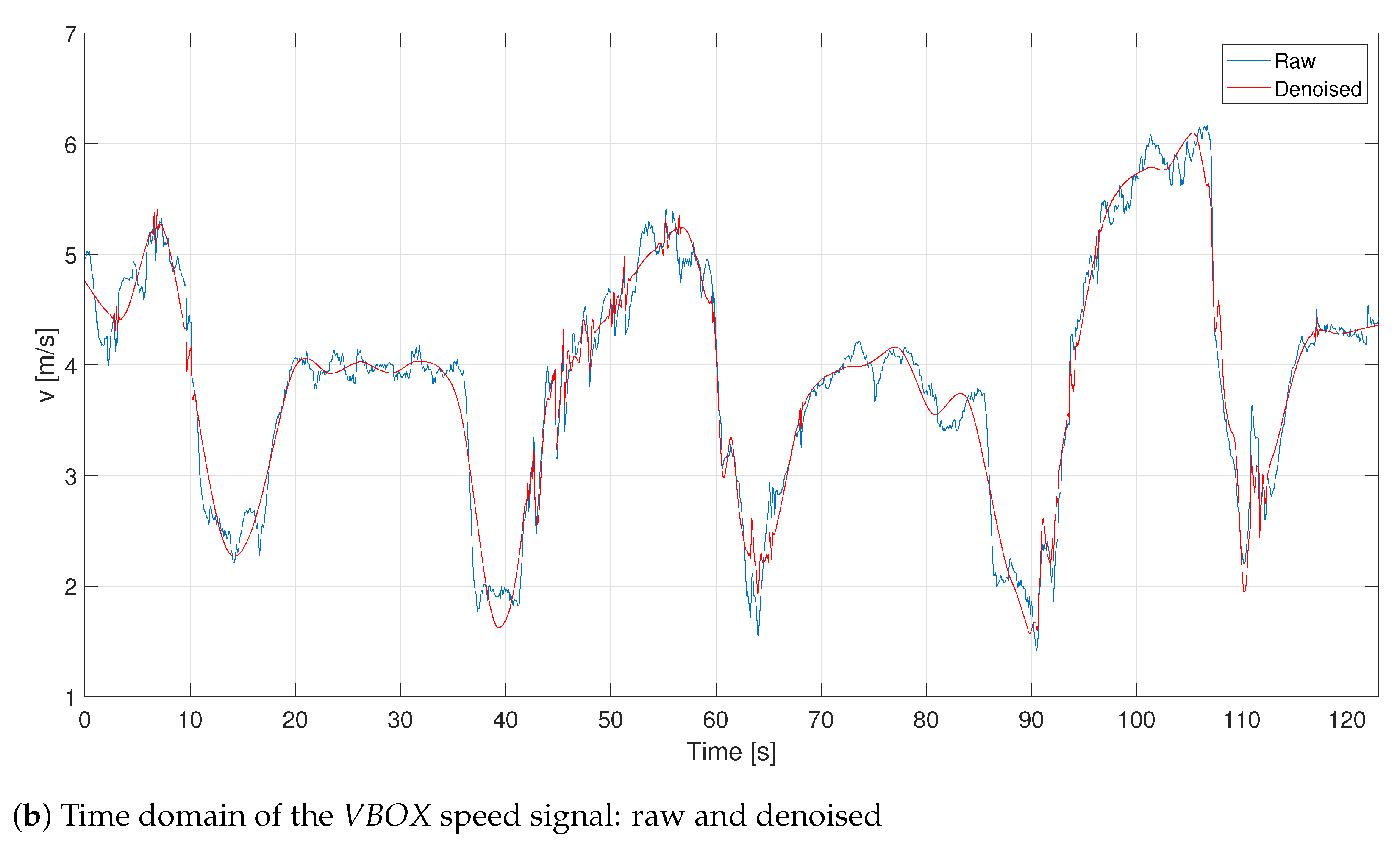
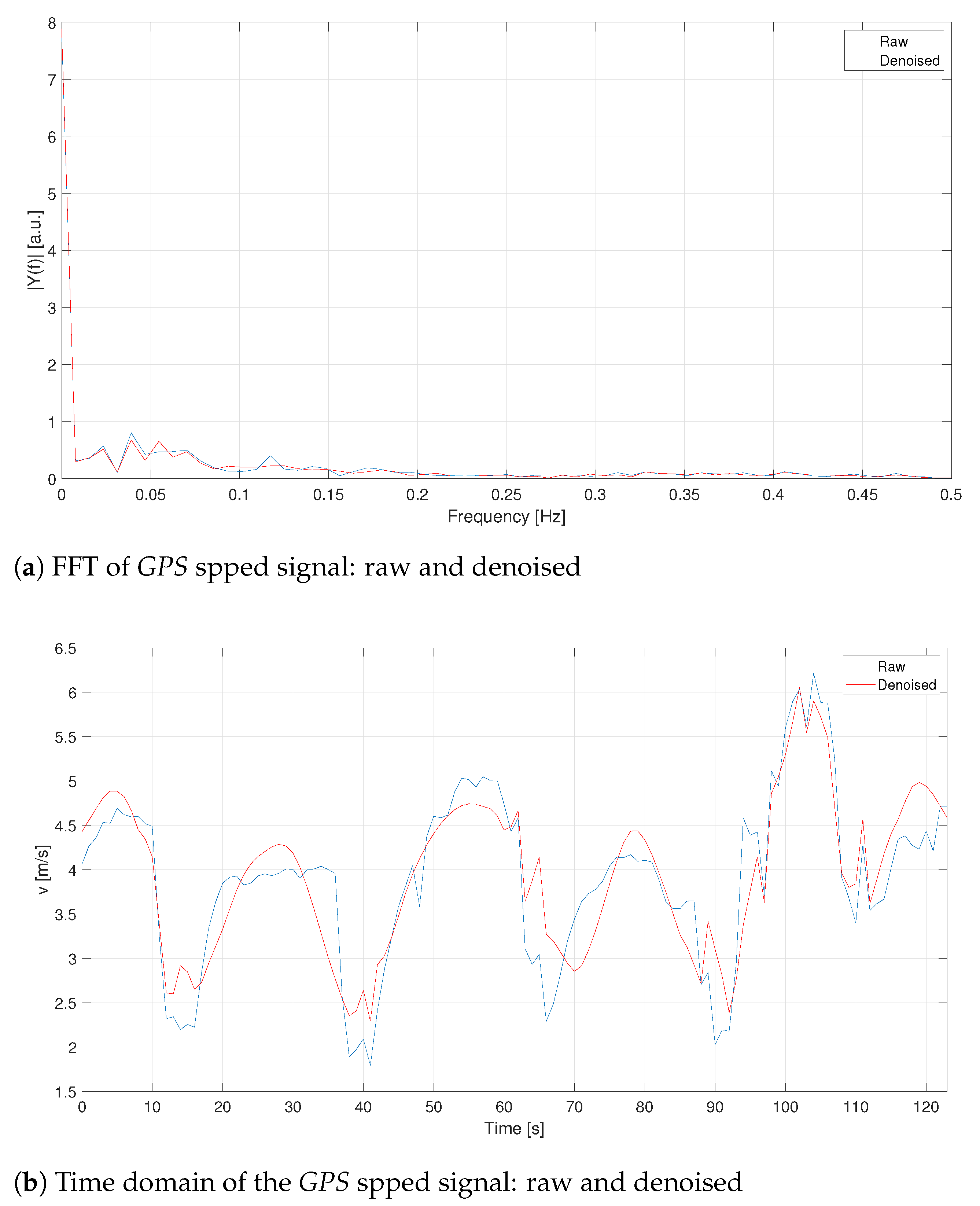
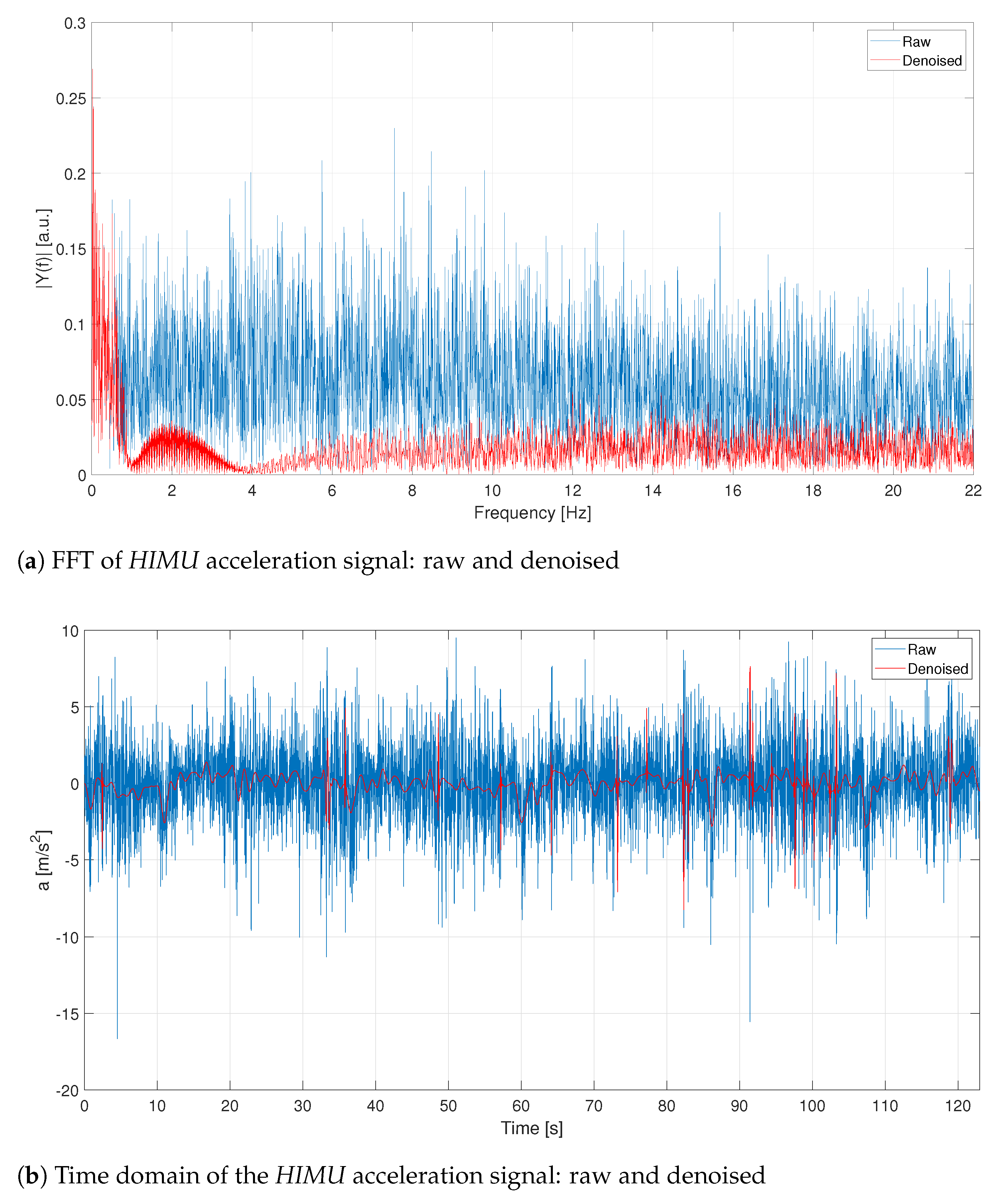
3.1. Signal Denoising
3.2. Outliers Removal
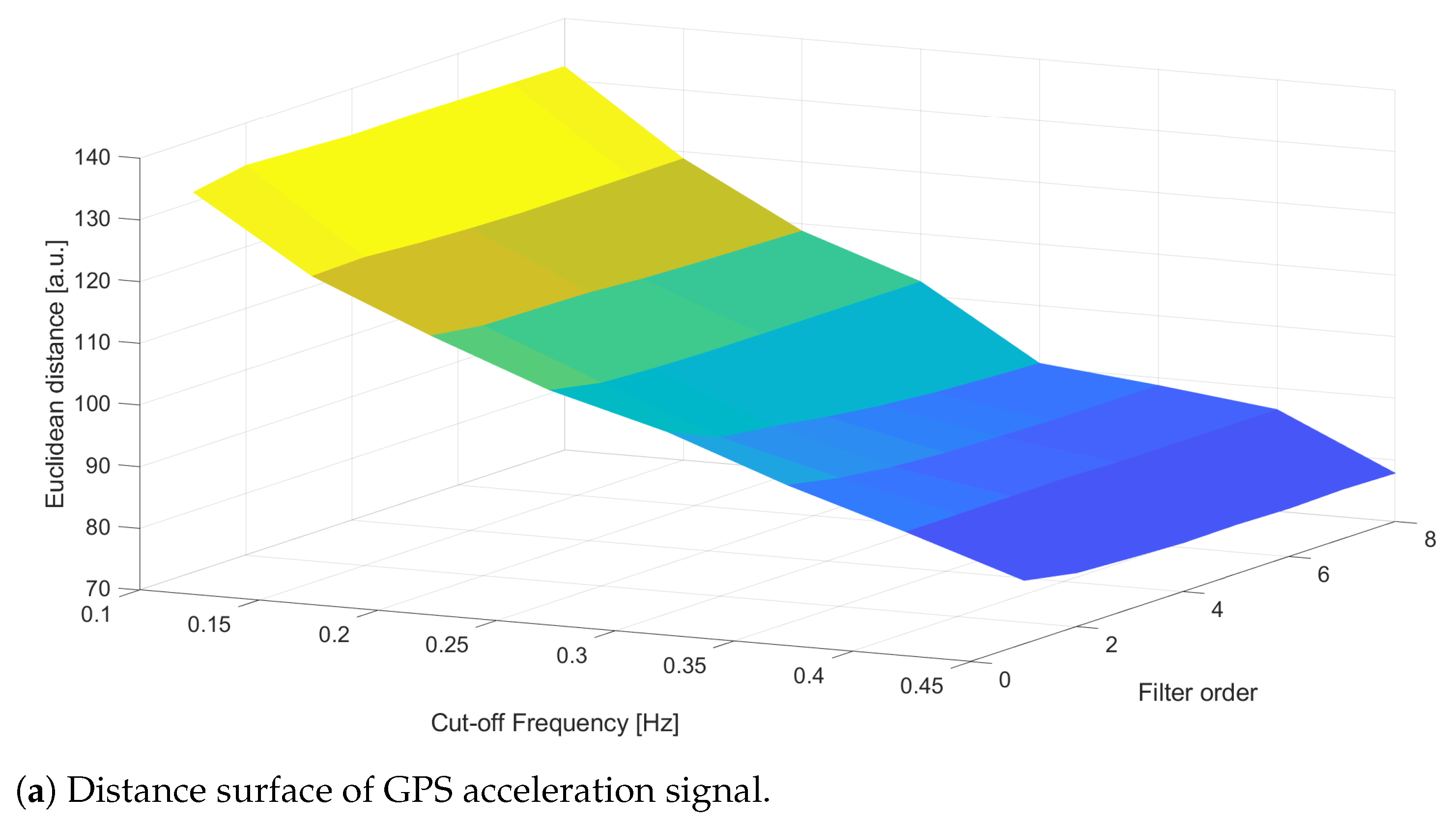
3.3. Signal Filtering
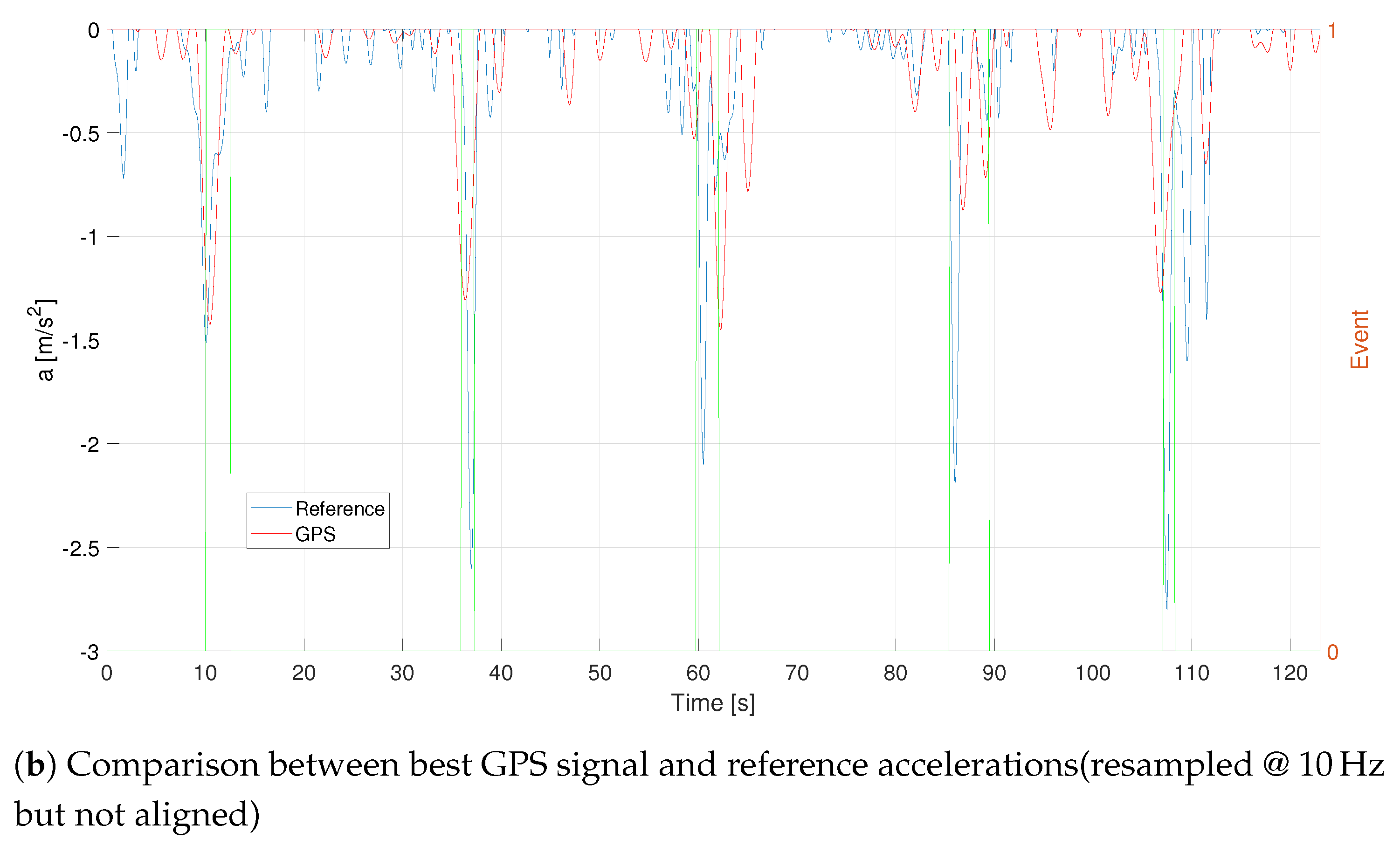
3.4. Resampling Procedure and Peaks Alignment
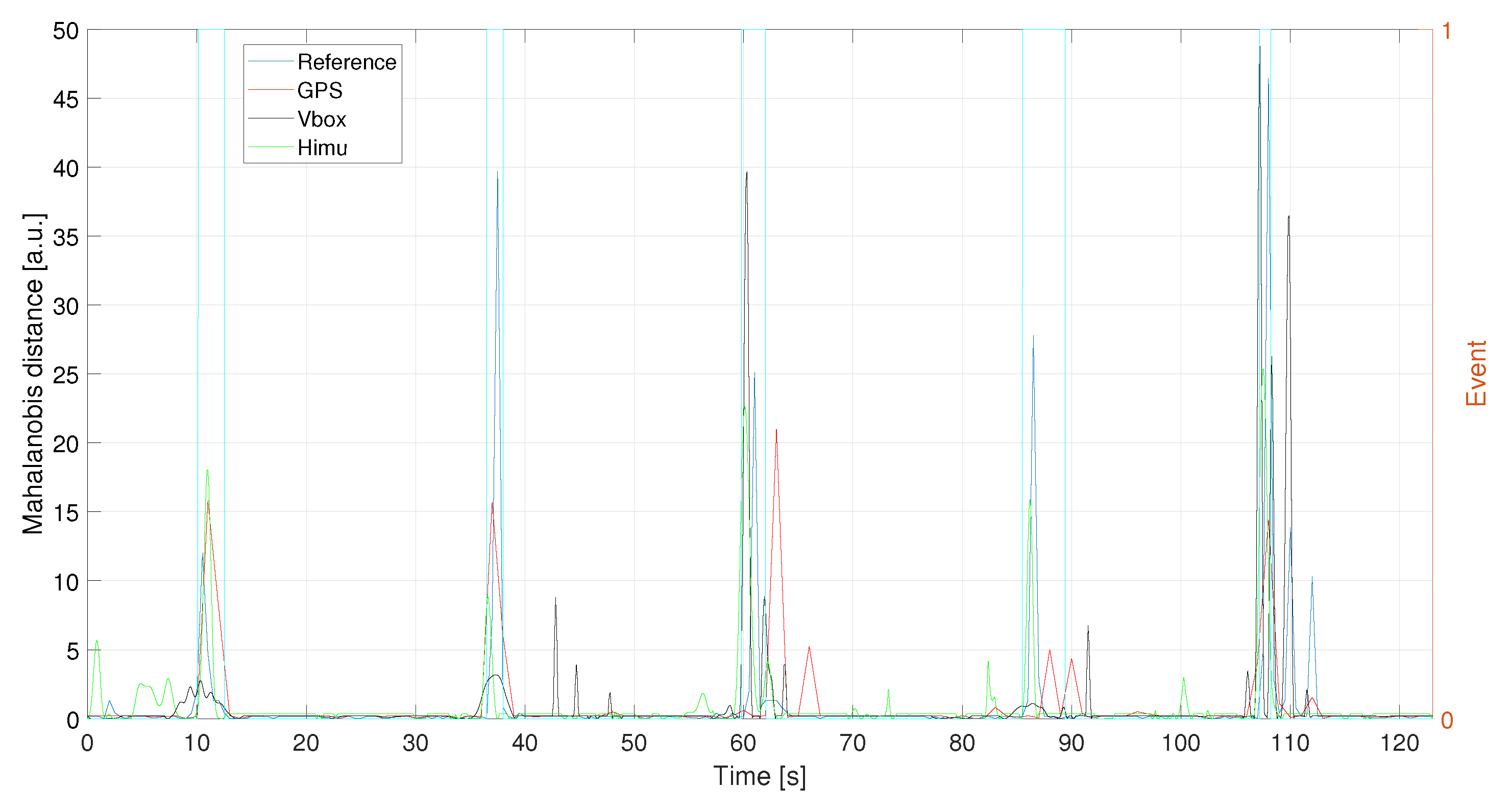
3.5. Mahalanobis Distance
4. Results
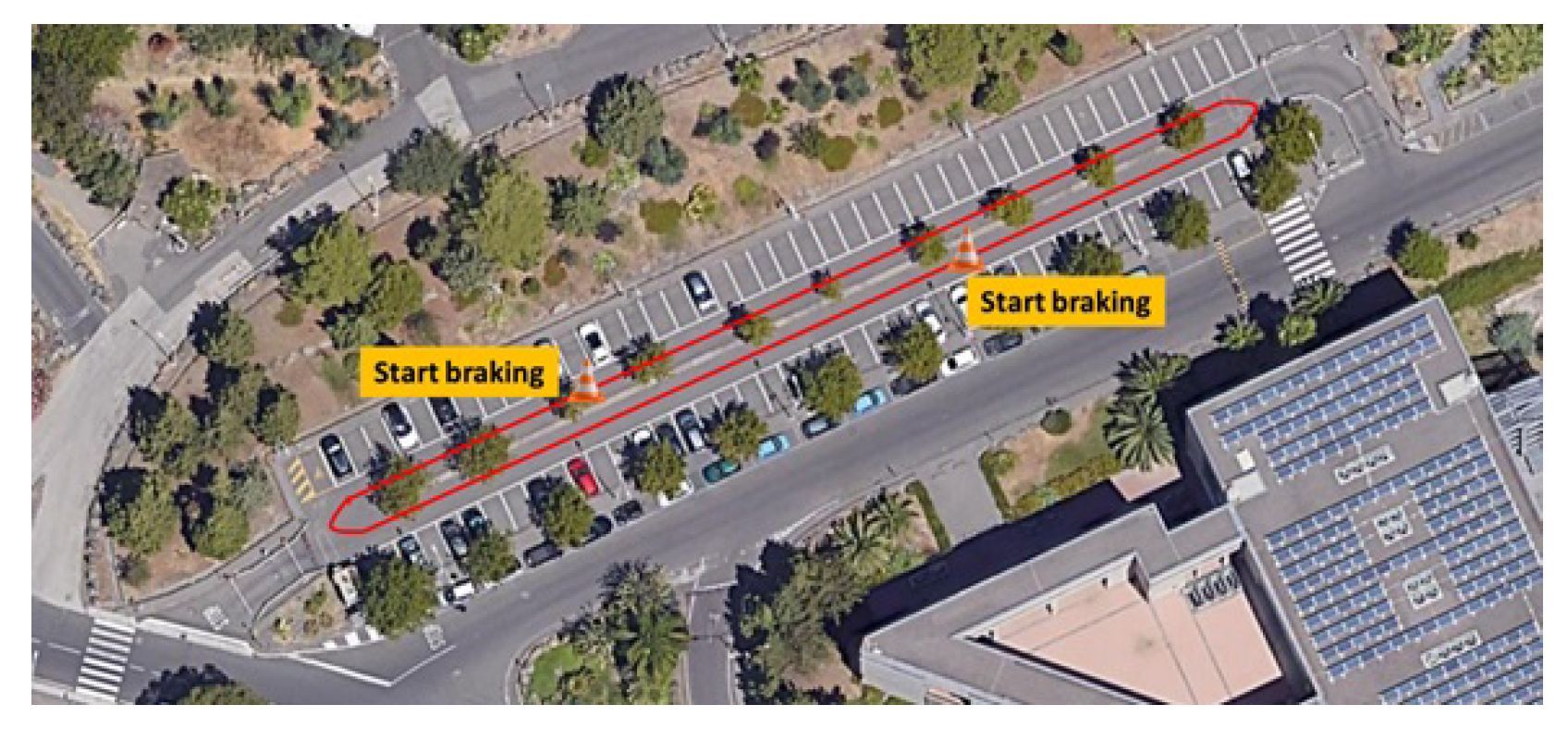
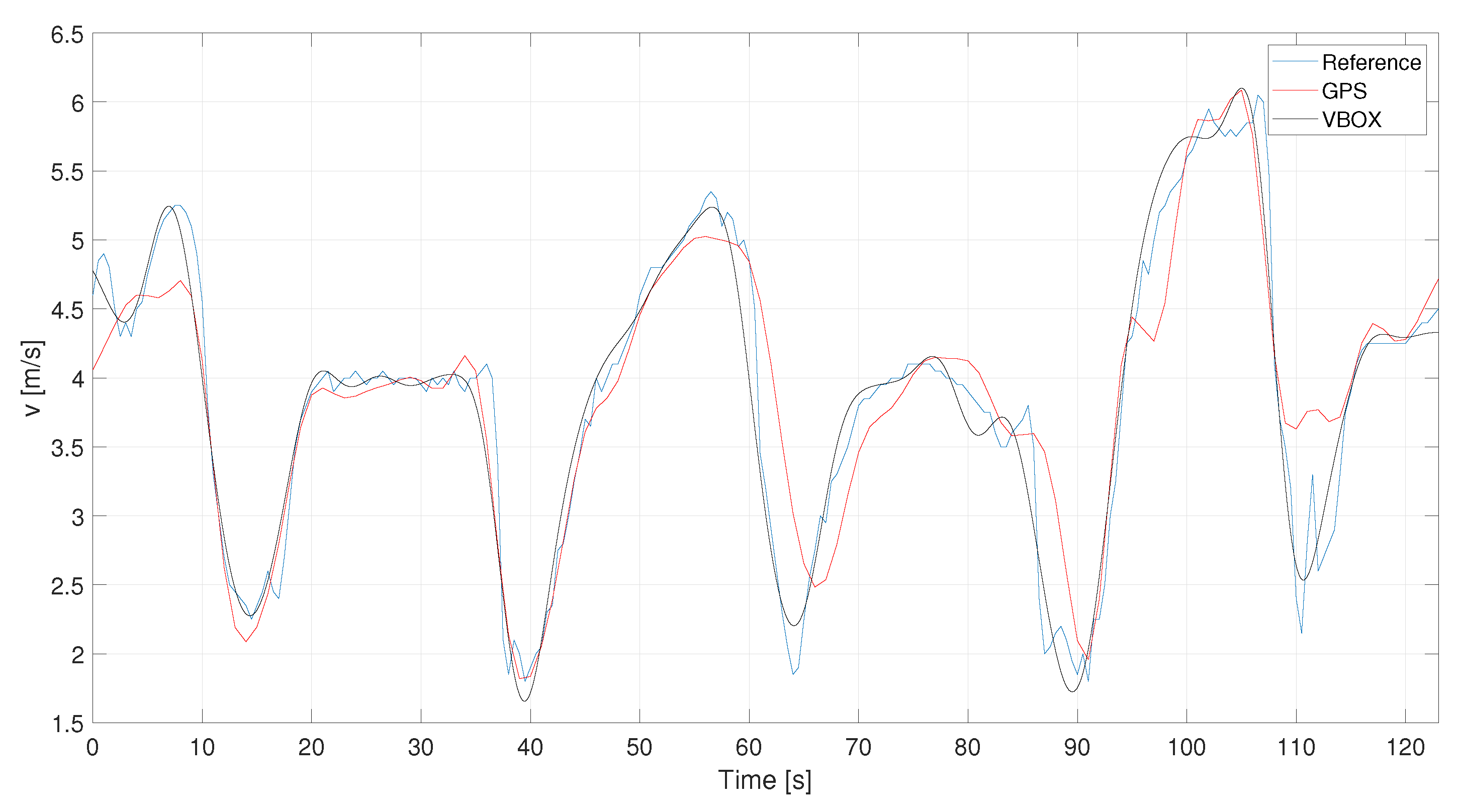
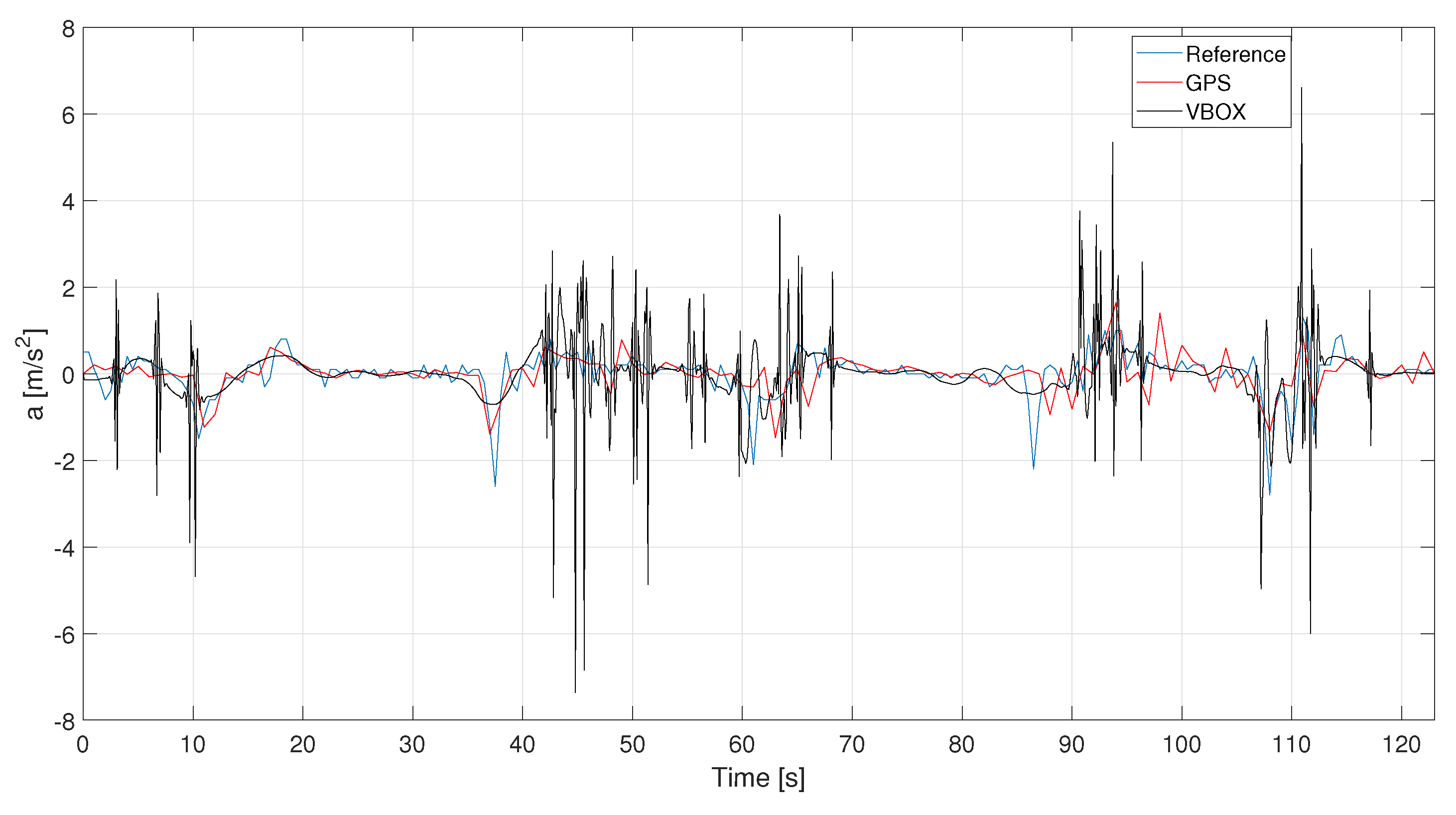
4.1. Calibration Test
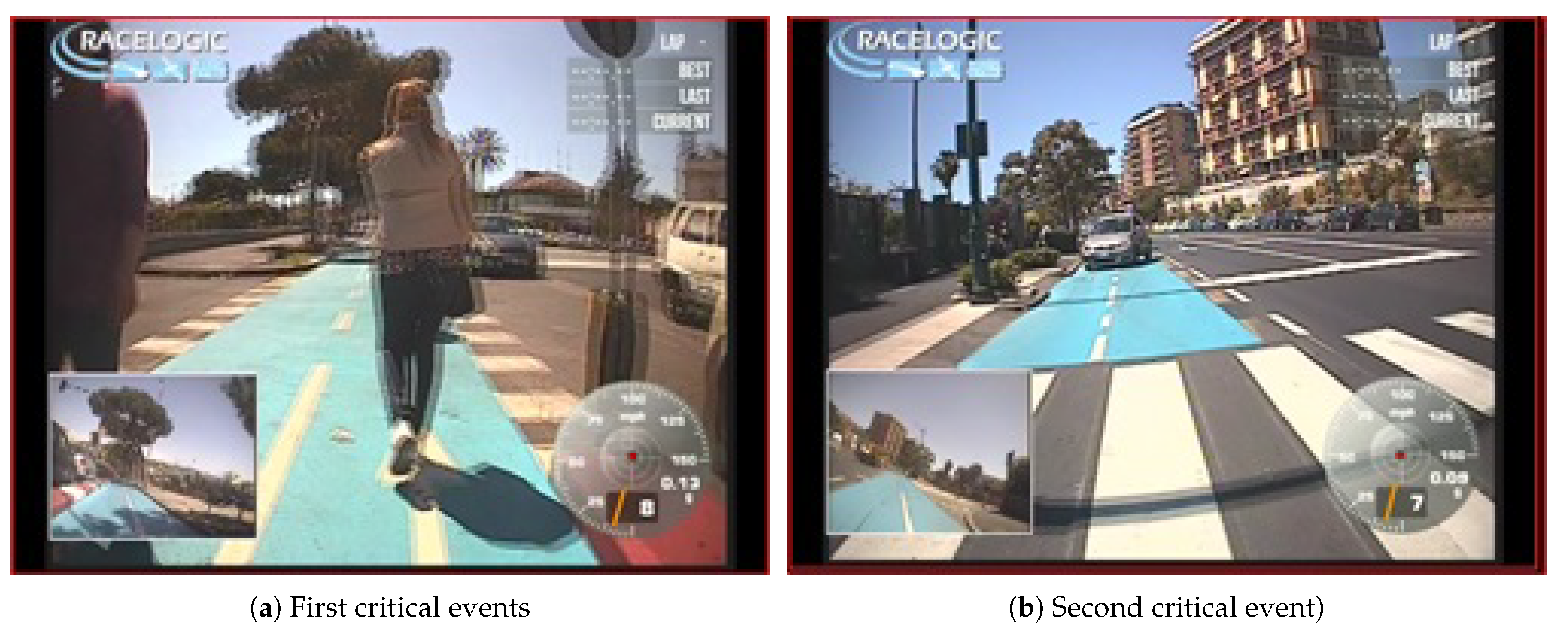
4.2. Real Scenario
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Commission. Traffic Safety Basic Facts on Cyclists. 2018. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/statistics/dacota/bfs20xx_cyclists.pdf (accessed on 5 April 2021).
- Townsend, E.; The European Union’s Role in Promoting the Safety of Cycling. Proposals for a Safety Component in a Future EU Cycling Strategy. 2016. Available online: https://ec.europa.eu/transport/sites/transport/files/cycling-guidance/etsc_the-eus-role-in-promoting-the-safety-of-cycling.pdf (accessed on 5 April 2021).
- Civitas. Cycling in the City. 2020. Available online: https://ec.europa.eu/transport/sites/default/files/cycling-guidance/smart_choices_for_the_city_cycling_in_the_city_0.pdf (accessed on 5 April 2021).
- Jansen, R.; Lotan, T.; Winkelbauer, M.; Bärgman, J.; Kovaceva, J.; Donabauer, M.; Pommer, A.; Musicant, O.; Harel, A.; Wesseling, S.; et al. Interactions with Vulnerable Road Users; Deliverable 44.1 of the EU FP7 project; UDRIVE Deliverable 44.1; EU FP7 Project UDRIVE Consortium; European Commission: Brussels, Belgium, 2017; Available online: https://www.swov.nl/en/publication/interactions-vulnerable-road-users (accessed on 5 April 2021). [CrossRef]
- Madsen, T.; Andersen, C.; Kamaluddin, A.; Várhelyi, A.; Lahrmann, H. Review of current study methods for VRU safety, Appendix 4—Systematic literature review: Naturalistic driving studies. In In-Depth Understanding of Accident Causation for Vulnerable Road Users HORIZON 2020—The Framework Programme for Research and Innovation; InDeV consortium; Lunds Universitet, 2016; Available online: https://lup.lub.lu.se/search/publication/aa449485-7023-4ed4-a59c-0ef05a349daa (accessed on 5 April 2021).
- Raghavan, U.N.; Albert, R.; Kumara, S. Near linear time algorithm to detect community structures in large-scale networks. Phys. Rev. E 2007, 76, 036106. [Google Scholar] [CrossRef] [Green Version]
- Werneke, J.; Dozza, M.; Karlsson, M. Safety-critical events in everyday cycling—Interviews with bicyclists and video annotation of safety-critical events in a naturalistic cycling study. Transp. Res. Part F 2015, 35, 199–212. [Google Scholar] [CrossRef]
- Stamatiadis, N.; Pappalardo, G.; Cafiso, S. Use of technology to improve bicycle mobility in smart cities. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 86–91. [Google Scholar] [CrossRef]
- Candefjord, S.; Sandsjö, L.; Andersson, R.; Carlborg, N.; Szakal, A.; Westlund, J.; Sjöqvist, B.A. Using smartphones to monitor cycling and automatically detect accidents—Towards eCall functionality for cyclists. In Proceedings of the International Cycling Safety Conference, Göteborg, Sweden, 18–19 November 2014. [Google Scholar]
- Strauss, J.; Miranda-Moreno, L.F. Speed, travel time and delay for intersections and road segments in the Montreal network using cyclist Smartphone GPS data. Transp. Res. Part D Transp. Environ. 2017, 57, 155–171. [Google Scholar] [CrossRef]
- Kasnatscheew, A.; Olszewski, P.; Laureshyn, A.; Moeslund, T.; Polders, E. Deliverable 7.9, Final Report. InDeV: In-Depth Understanding of Accident Causation for Vulnerable Road Users HORIZON 2020—The Framework Programme for Research and Innovation. 2018. Available online: https://www.indev-project.eu/InDeV/EN/Documents/pdf/Final-report.pdf?__blob=publicationFile&v=2 (accessed on 5 April 2021).
- Shinar, D.; Valero-Mora, P.; van Strijp-Houtenbos, M.; Haworth, N.; Schramm, A.; De Bruyne, G.; Cavallo, V.; Chliaoutakis, J.; Dias, J.; Ferraro, O.; et al. Under-reporting bicycle accidents to police in the COST TU1101 international survey: Cross-country comparisons and associated factors. Accid. Anal. Prev. 2018, 110, 177–186. [Google Scholar] [CrossRef] [PubMed]
- Cafiso, S.; Di Graziano, A.; Pappalardo, G. In-vehicle stereo vision system for identification of traffic conflicts between bus and pedestrian. J. Traffic Transp. Eng. (Engl. Ed.) 2017, 4, 3–13. [Google Scholar] [CrossRef]
- Schleinitz, K.; Petzoldt, T.; Franke-Bartholdt, L.; Krems, J.; Gehlert, T. Conflict partners and infrastructure use in safety critical events in cycling—Results from a naturalistic cycling study. Transp. Res. Part F 2015, 31, 99–111. [Google Scholar] [CrossRef]
- Romanillos, G.; Austwick, M.Z.; Ettema, D.; De Kruijf, J. Big Data and Cycling. Transp. Rev. 2016, 36, 114–133. [Google Scholar] [CrossRef]
- Miah, S.; Milonidis, E.; Kaparias, I.; Karcanias, N. An Innovative Multi-Sensor Fusion Algorithm to Enhance Positioning Accuracy of an Instrumented Bicycle. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1145–1153. [Google Scholar] [CrossRef]
- Agency, E.G. White Paper on Using GNSS Raw Measurements on Android Devices. 2017. Available online: https://www.gsa.europa.eu/system/files/reports/gnss_raw_measurement_web_0.pdf (accessed on 5 April 2021).
- Merry, K.; Bettinger, P. Smartphone GPS accuracy study in an urban environment. PLoS ONE 2019, 14, e0219890. [Google Scholar] [CrossRef] [Green Version]
- Vlahogianni, E.I.; Barmpounakis, E.N. Driving analytics using smartphones: Algorithms, comparisons and challenges. Transp. Res. Part C Emerg. Technol. 2017, 79, 196–206. [Google Scholar] [CrossRef]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Using Mobile Smartphones for Rich Monitoring of Road and Traffic Conditions. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; pp. 357–358. [Google Scholar] [CrossRef]
- Strauss, J.; Zangenehpour, S.; Miranda-Moreno, L.; Saunier, N. Cyclist deceleration rate as surrogate safety measure in Montreal using smartphone GPS data. Accid. Anal. Prev. 2017, 99, 287–296. [Google Scholar] [CrossRef] [PubMed]
- Ghose, A.; Chowdhury, A.; Chandel, V.; Banerjee, T.; Chakravarty, T. An Enhanced Automated System for Evaluating Harsh Driving Using Smartphone Sensors. In Proceedings of the 17th International Conference on Distributed Computing and Networking, ICDCN ’16, Singapore, 4–7 January 2016. [Google Scholar] [CrossRef]
- Harvey, F.; Krizek, K. Commuter Bicyclist Behavior and Facility Disruption—Transportation Research Board. Available online: https://trid.trb.org/view.aspx?id=811576 (accessed on 5 April 2021).
- Woodcock, J.; Tainio, M.; Cheshire, J.; O’Brien, O.; Goodman, A. Health effects of the London bicycle sharing system: Health impact modelling study. BMJ 2014, 348. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Joo, S.; Oh, C.; Jeong, E.; Lee, G. Categorizing bicycling environments using GPS-based public bicycle speed data. Transp. Res. Part C Emerg. Technol. 2015, 56, 239–250. [Google Scholar] [CrossRef]
- Fishman, E.; Schepers, P. Global bike share: What the data tells us about road safety. J. Saf. Res. 2016, 56, 41–45. [Google Scholar] [CrossRef]
- Fournier, N.; Christofa, E.; Knodler, M.A. A sinusoidal model for seasonal bicycle demand estimation. Transp. Res. Part D Transp. Environ. 2017, 50, 154–169. [Google Scholar] [CrossRef]
- Faghih-Imani, A.; Eluru, N.; El-Geneidy, A.M.; Rabbat, M.; Haq, U. How land-use and urban form impact bicycle flows: Evidence from the bicycle-sharing system (BIXI) in Montreal. J. Transp. Geogr. 2014, 41, 306–314. [Google Scholar] [CrossRef]
- Pogodzinska, S.; Kiec, M.; D’Agostino, C. Bicycle Traffic Volume Estimation Based on GPS Data. Transp. Res. Procedia 2020, 45, 874–881. [Google Scholar] [CrossRef]
- Cafiso, S.; Pappalardo, G.; Stamatiadis, N. Collecting data on Risk Perceptions and Observed Risk in Smart Cities. In Proceedings of the PMT-ITS 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems, Krakòw, Poland, 5–7 June 2019. [Google Scholar]
- Meyer, Y. Wavelets and Operators; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Frigo, M.; Johnson, S.G. FFTW: An adaptive software architecture for the FFT. In Proceedings of the 1998 IEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP ’98 (Cat. No.98CH36181), Seattle, WA, USA, 15 May 1998; Volume 3, pp. 1381–1384. [Google Scholar] [CrossRef]
- Chen, X.; Xu, X.; Yang, Y.; Wu, H.; Tang, J.; Zhao, J. Augmented Ship Tracking Under Occlusion Conditions From Maritime Surveillance Videos. IEEE Access 2020, 8, 42884–42897. [Google Scholar] [CrossRef]
- Pukelsheim, F. The Three Sigma Rule. Am. Stat. 1994, 48, 88–91. [Google Scholar]
- Bruwer, F.J.; Booysen, M.J. Comparison of GPS and MEMS Support for Smartphone-Based Driver Behavior Monitoring. In Proceedings of the 2015 IEEE Symposium Series on Computational Intelligence, Cape Town, South Africa, 7–10 December 2015; pp. 434–441. [Google Scholar] [CrossRef]
- Butterworth, S. On the Theory of Filter Amplifiers. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Gustafsson, F. Determining the initial states in forward-backward filtering. IEEE Trans. Signal Process. 1996, 44, 988–992. [Google Scholar] [CrossRef] [Green Version]
- Parks, T.; Burrus, C. Digital Filter Design; John Wiley & Sons: Hoboken, NJ, USA, 1987; pp. 54–83. [Google Scholar]
- Crochiere, R.E.; Rabiner, L.R. Multirate Digital Signal Processing; Prentice-Hall: Upper Saddle River, NJ, USA, 1983. [Google Scholar]
- Mathworks. Resample. 2006. Available online: Https://it.mathworks.com/help/signal/ref/resample.html (accessed on 5 April 2021).
- Singh, G.; Bansal, D.; Sofat, S. A smartphone based technique to monitor driving behavior using DTW and crowdsensing. Pervasive Mob. Comput. 2017, 40, 56–70. [Google Scholar] [CrossRef]
- Tomasi, G.; Van den Berg, F.; Andersson, C. Correlation optimized warping and dynamic time warping as preprocessing methods for chromatographic data. J. Chemom. 2004, 18, 231–541. [Google Scholar] [CrossRef]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Cafiso, S.; Di Graziano, A.; Pappalardo, G.; Giudice, O. Using GPS data to detect critical events in motorcycle rider behavior. Int. J. Mob. Netw. Des. Innov. 2014, 5, 195–204. [Google Scholar]
- Mahalanobis, P.C. On the generalized distance in statistics. Natl. Inst. Sci. India 1936, 2, 49–55. [Google Scholar]






















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murgano, E.; Caponetto, R.; Pappalardo, G.; Cafiso, S.D.; Severino, A. A Novel Acceleration Signal Processing Procedure for Cycling Safety Assessment. Sensors 2021, 21, 4183. https://doi.org/10.3390/s21124183
Murgano E, Caponetto R, Pappalardo G, Cafiso SD, Severino A. A Novel Acceleration Signal Processing Procedure for Cycling Safety Assessment. Sensors. 2021; 21(12):4183. https://doi.org/10.3390/s21124183
Chicago/Turabian StyleMurgano, Emanuele, Riccardo Caponetto, Giuseppina Pappalardo, Salvatore Damiano Cafiso, and Alessandro Severino. 2021. "A Novel Acceleration Signal Processing Procedure for Cycling Safety Assessment" Sensors 21, no. 12: 4183. https://doi.org/10.3390/s21124183