
Noise Cancellation of Helicopter Blade Deformations Measurement by Fiber Bragg Gratings


 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
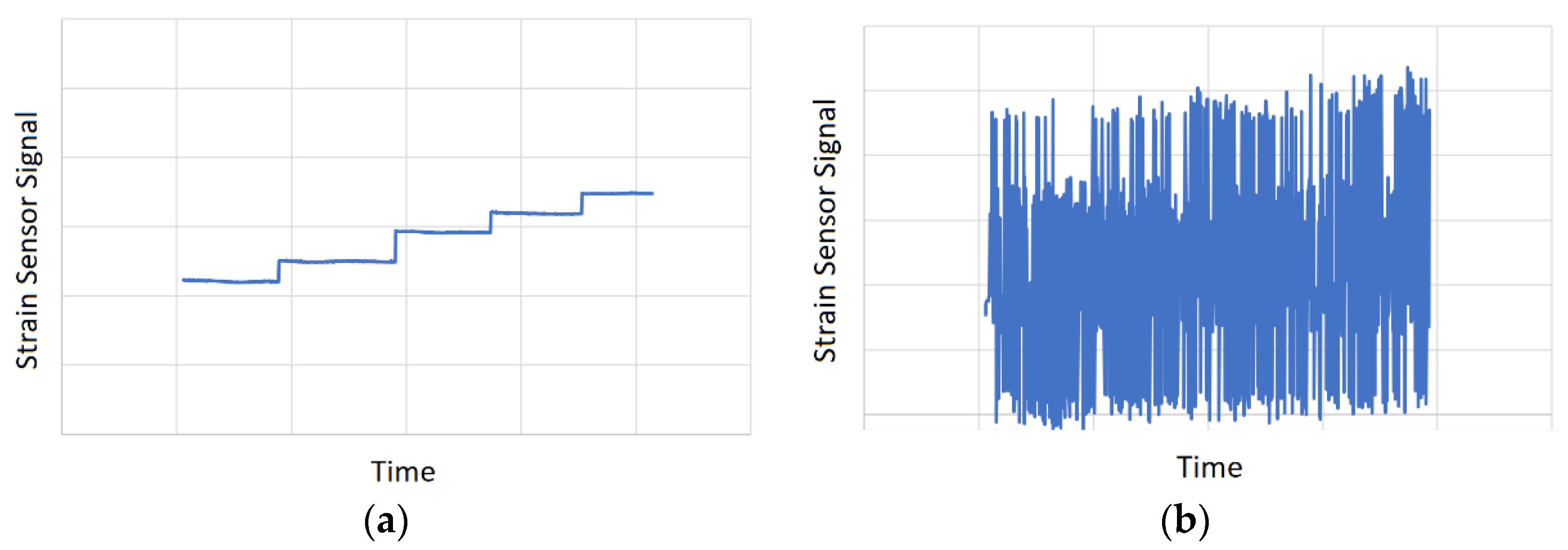
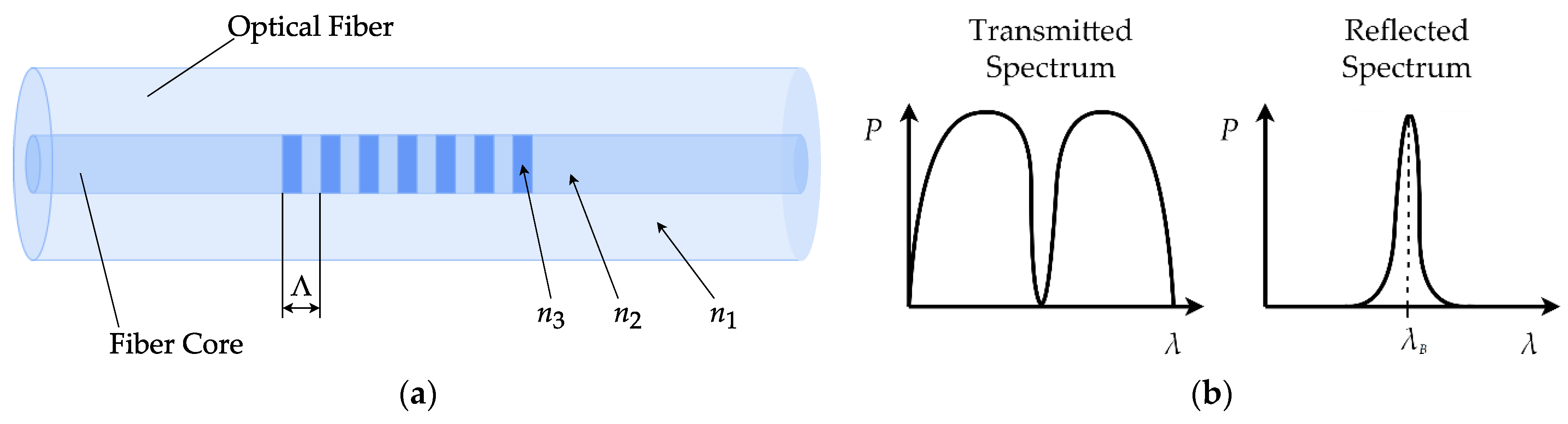
2. Deformation Measurement Using Fiber Bragg Gratings
3. Noise Cancellation Methods
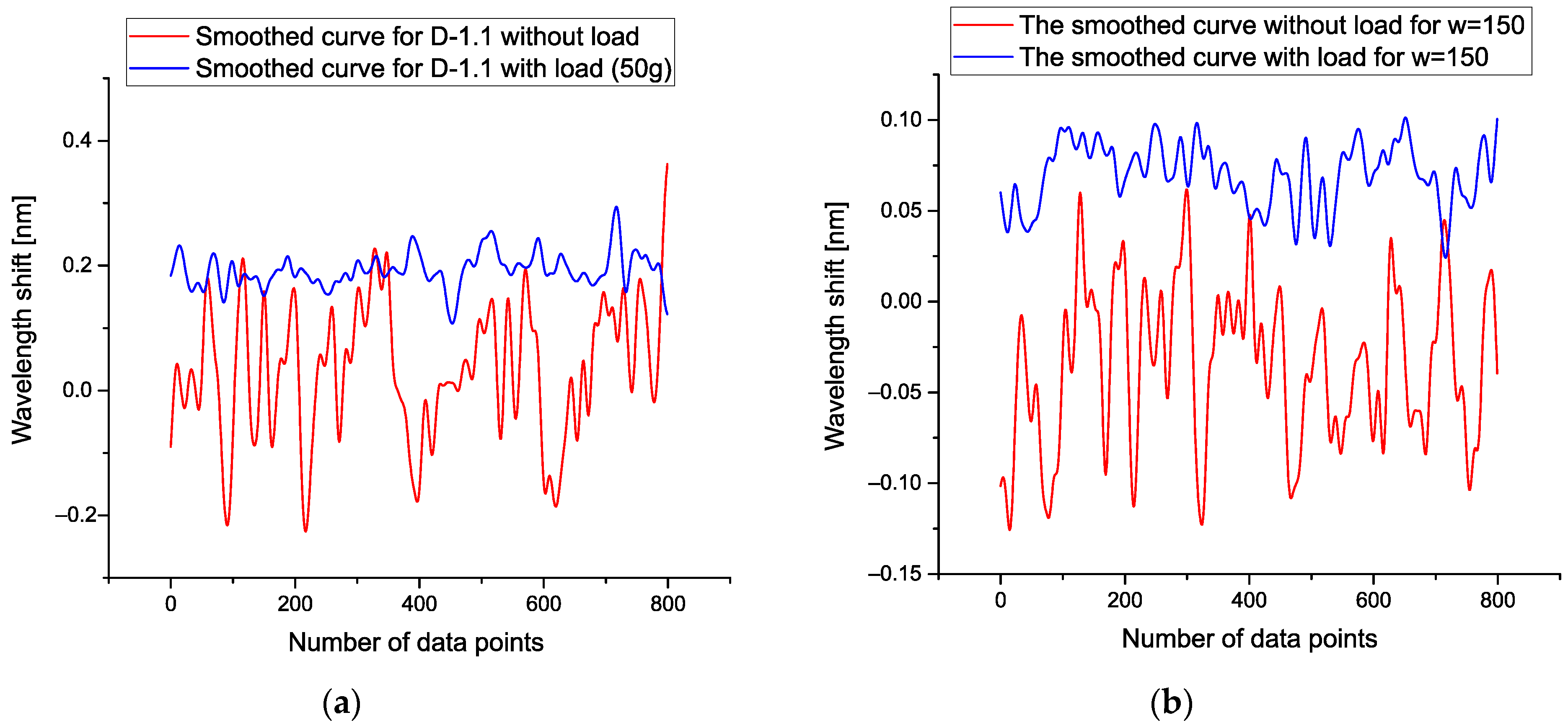
3.1. Description of the POLS Method
- (a)
- This expression is linear with respect to the function yi subjected to the smoothing procedure. Therefore, it does not contain any additional distortions evoked by the possible treatment of a function yi;
- (b)
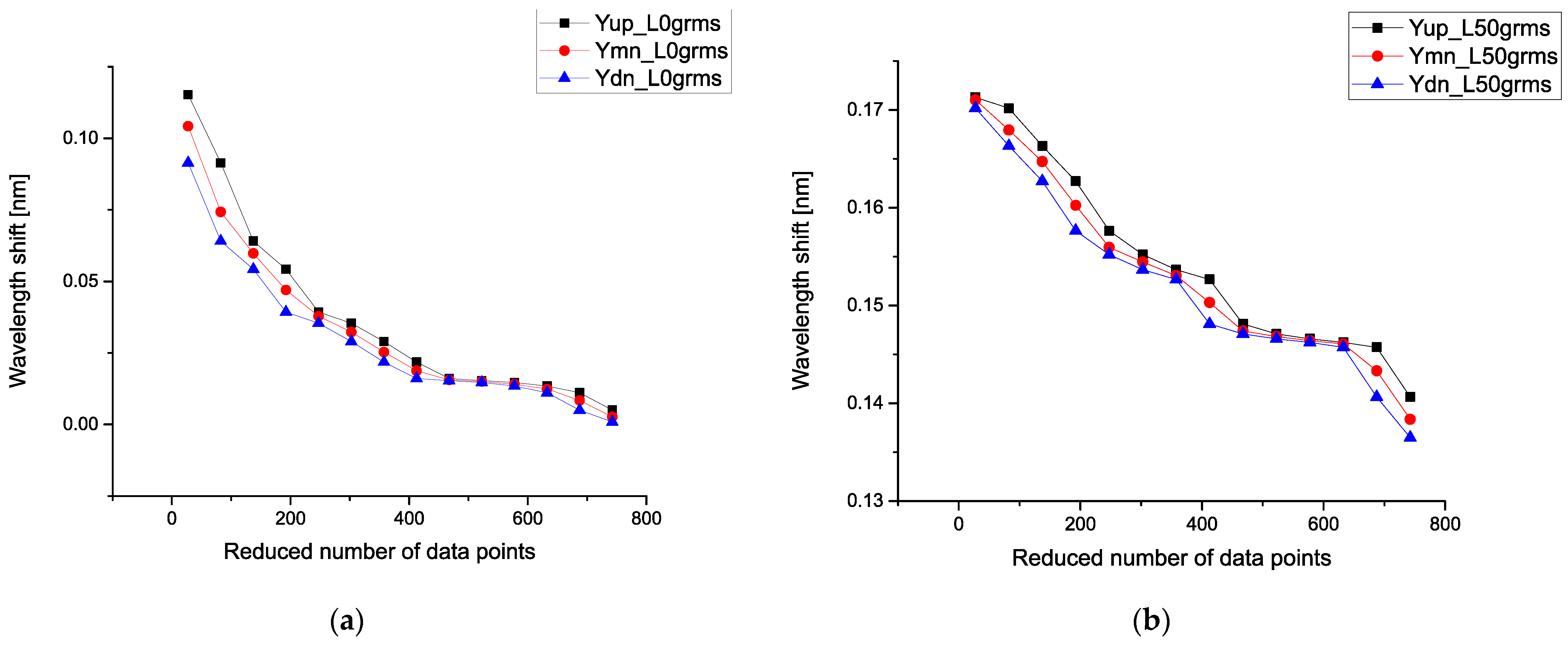
- If w >> 1, then (as it is easily seen from Expression (2)) the smoothed function Ysmj coincides with its mean value;
- (c)
- If w becomes close to the zero value, then the smoothing kernel K(t) coincides practically with delta function δ(xj − xi) and therefore, in this case, Ysmj (0) ≅ yj.
3.2. Description of 3D-DGI Method
- The POLS is a linear tool, and it does not distort initial data;
- When the value of the smoothing window tends to zero (w → 0), then the smoothed replica coincides with the initial data. In another limiting case, when w >> 1, the smoothed replica coincides with its arithmetic mean.
- Thanks to 13 universal parameters defining the feature space, it allows the comparison of the different random sequences having different natures;
- It can be applied to analyses of the TLS and, therefore, this tool forms a universal platform that cannot contain treatment errors;
- Section 3, given above, gives an example for its application to real data.
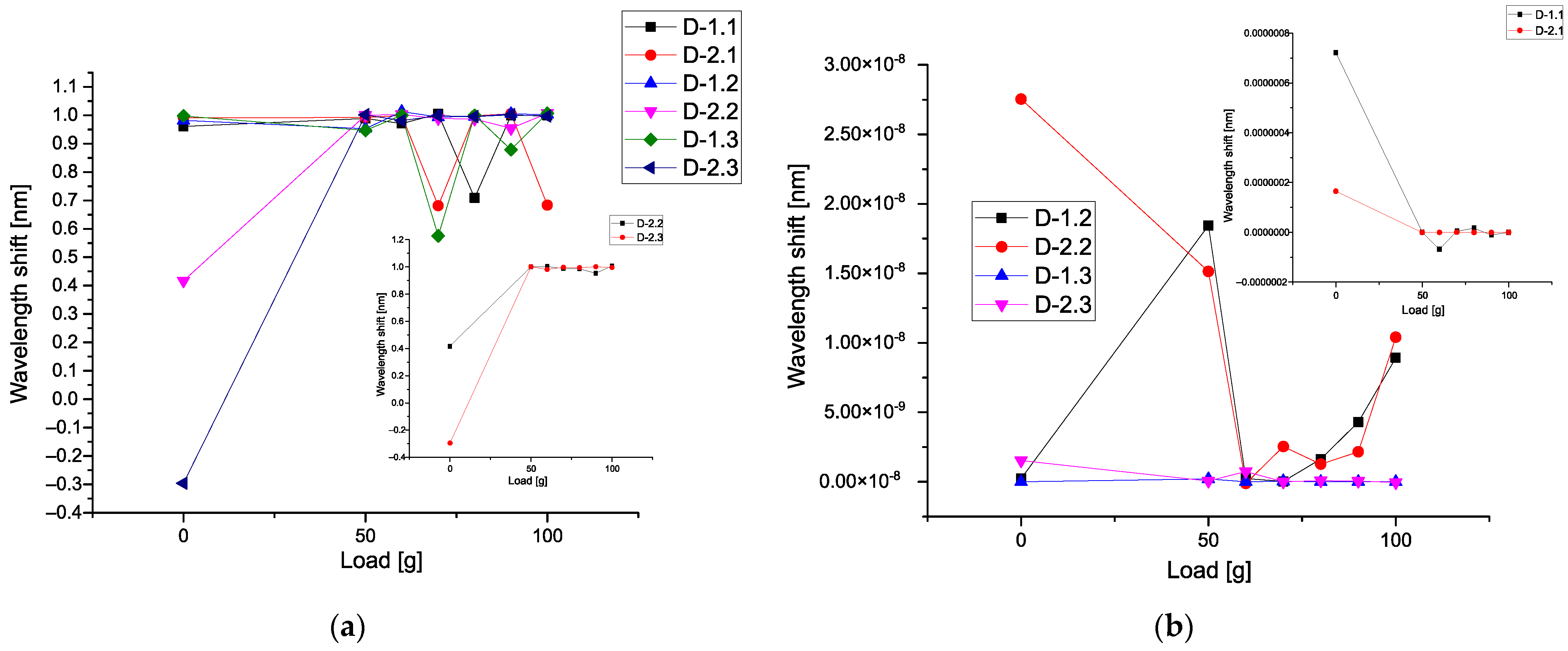
4. Experimental Results and Their Treatment
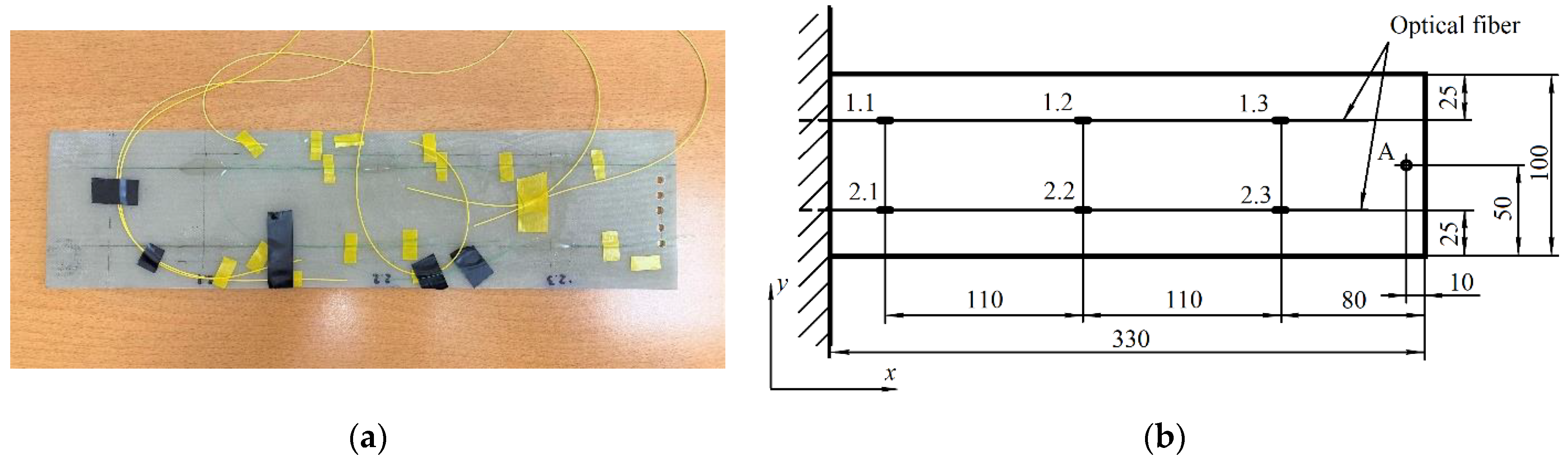
4.1. Experimental Setup
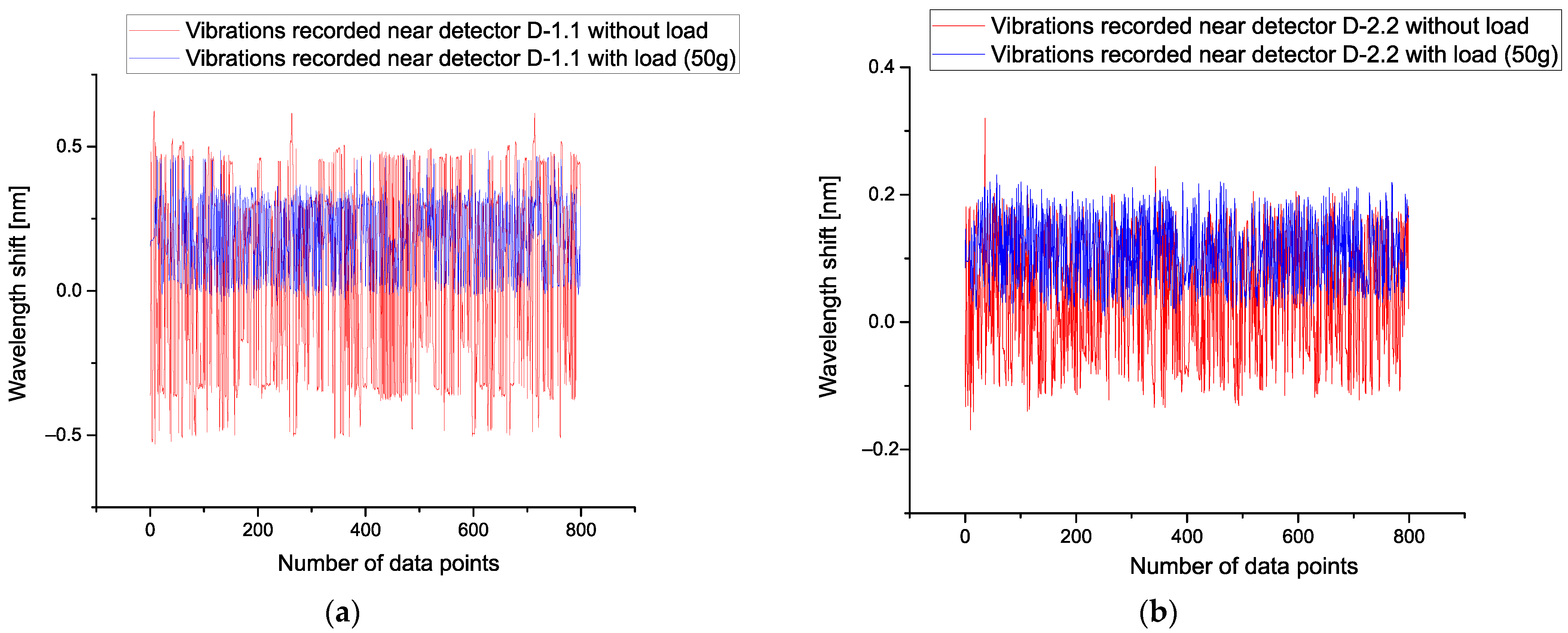
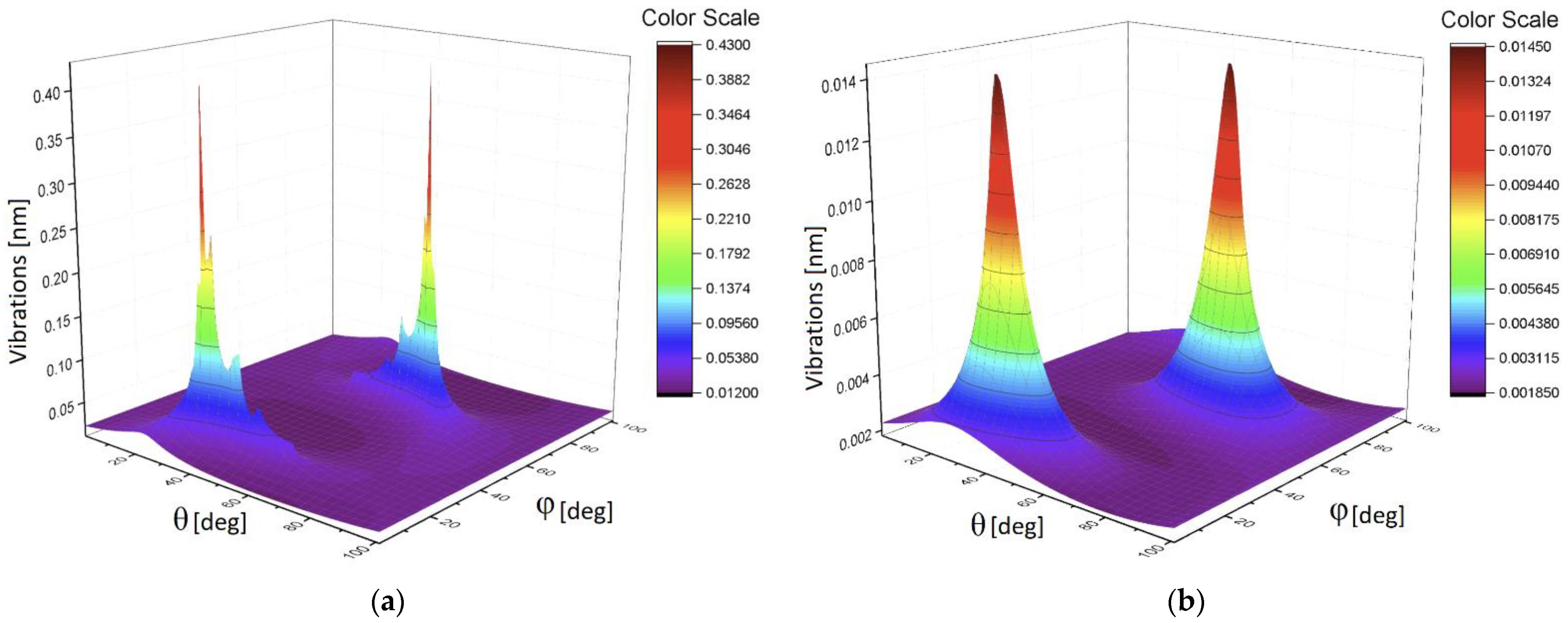
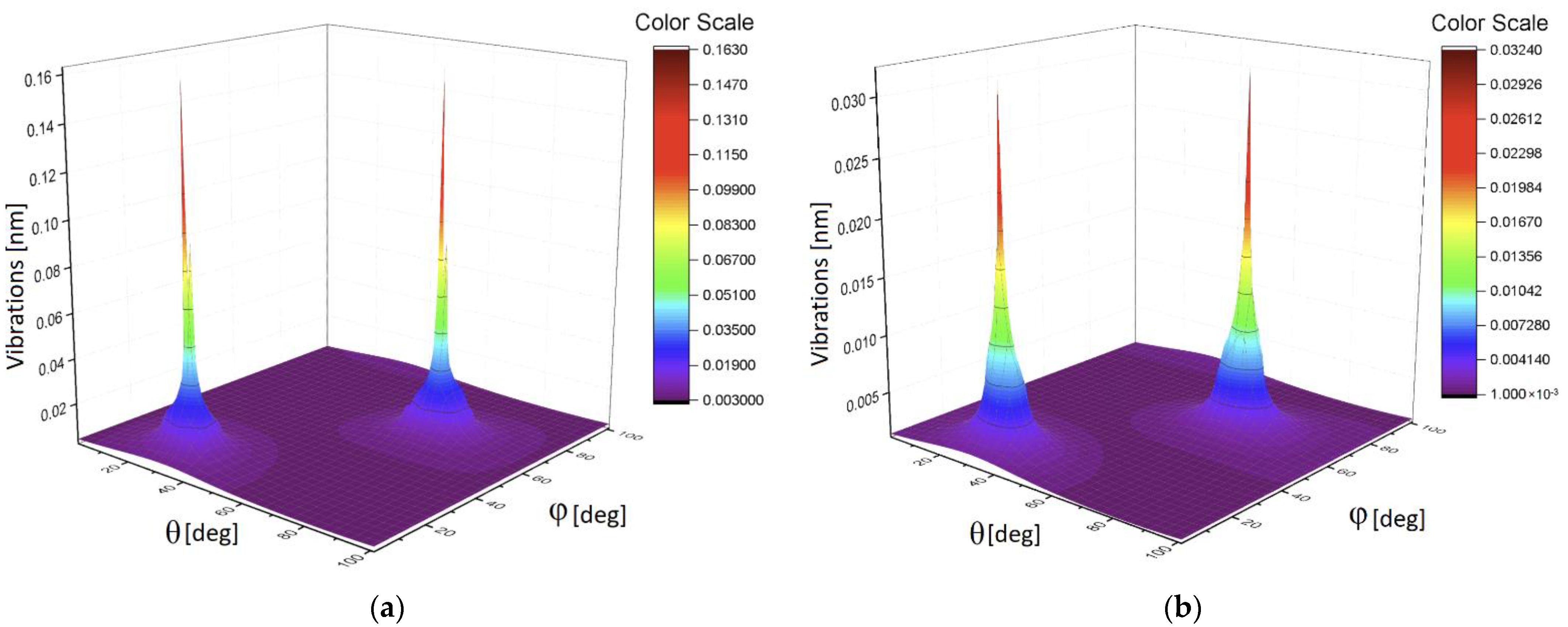
4.2. Treatment Procedure
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, H.; Viswamurthy, S.R.; Park, S.C.; Kim, T.; Shin, S.J. Helicopter Rotor Load Prediction Using a Geometrically Exact Beam with Multicomponent Model. J. Aircr. 2010, 47, 1382–1390. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, R.H. Optical Tracker System for Determining the Position of a Rotating Body. U.S. Patent 5929431A, 27 July 1999. [Google Scholar]
- Christopher, I.M. Helicopter Blade Position Detector. U.S. Patent 8190393B2, 29 May 2012. [Google Scholar]
- Sirohi, J.; Lawson, M. Measurement of helicopter rotor blade deformation using digital image correlation. Opt. Eng. 2012, 51, 3603. [Google Scholar] [CrossRef]
- Fleming, G.A.; Gorton, S.A. Measurement of rotorcraft blade deformation using Projection Moire Interferometry. Shock Vib. 2000, 7, 149–165. [Google Scholar] [CrossRef]
- Gaukroger, D.R.; Payen, D.B.; Walker, A.R. Application of Strain Gauge Pattern Analysis. In Proceedings of the Sixth European Rotorcraft and Powered Lift Aircraft Forum, Bristol, UK, 16–19 September 1980; p. 19. [Google Scholar]
- Leung, J.G.M.; Wei, M.Y.; Aoyagi, M. UH-60A airloads data acquisition and processing system. In Proceedings of the AIAA/IEEE Digital Avionics Systems Conference, 13th DASC, Phoenix, AZ, USA, 30 October–3 November 1994; pp. 206–211. [Google Scholar] [CrossRef] [Green Version]
- Datta, A.; Chopra, I. Validation of Structural and Aerodynamic Modeling Using UH-60A Airloads Program Data. J. Am. Helicopter Soc. 2006, 51, 43–58. [Google Scholar] [CrossRef]
- Broadway, C.; Min, R.; Leal-Junior, A.G.; Marques, C.; Caucheteur, C. Toward Commercial Polymer Fiber Bragg Grating Sensors: Review and Applications. J. Lightwave Technol. 2019, 37, 2605–2615. [Google Scholar] [CrossRef]
- Chehura, E.; Jarzebinska, R.; Da Costa, E.F.R.; Skordos, A.A.; James, S.W.; Partridge, I.K.; Tatam, R.P. Multiplexed fibre optic sensors for monitoring resin infusion, flow, and cure in composite material processing. In Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2013; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8693, p. 86930F. [Google Scholar] [CrossRef]
- Lawson, N.J.; Correia, R.; James, S.W.; Partridge, M.; Staines, S.E.; Gautrey, J.E.; Garry, K.P.; Holt, J.C.; Tatam, R.P. Development and application of optical fibre strain and pressure sensors for in-flight measurements. Meas. Sci. Technol. 2016, 27, 104001. [Google Scholar] [CrossRef]
- Suesse, S.; Hajek, M. Rotor Blade Shape Estimation with Fiber-Optical Sensors for a Health and Usage Monitoring System. In Proceedings of the 42nd European Rotorcraft Forum, Lille, France, 5–8 September 2016. [Google Scholar]
- Wada, D.; Igawa, H.; Kasai, T. Vibration monitoring of a helicopter blade model using the optical fiber distributed strain sensing technique. Appl. Opt. 2016, 55, 6953–6959. [Google Scholar] [CrossRef]
- Daniell, J.G.B.; Molnar, G.A. Helicopter Weight Measurement. U.S. Patent 5,229,956, 20 July 1993. [Google Scholar]
- Sahota, J.K.; Gupta, N.; Dhawan, D. Fiber Bragg grating sensors for monitoring of physical parameters: A comprehensive review. Opt. Eng. 2020, 59, 060901. [Google Scholar] [CrossRef]
- Melle, S.; Liu, K. Wavelength demodulated Bragg grating fiber optic sensing systems for addressing smart structure critical issues. Smart Mater. Struct. 1992, 1, 36. [Google Scholar] [CrossRef]
- Davis, M.A.; Bellemore, D.G.; Kersey, A.D. Structural strain mapping using a wavelength/time division addressed fiber Bragg grating array. Proc. SPIE 1994, 2361, 342–345. [Google Scholar] [CrossRef]
- Matveenko, V.P.; Shardakov, I.N.; Voronkov, A.A.; Kosheleva, N.A.; Lobanov, D.S.; Serovaev, G.S.; Spaskova, E.M.; Shipunov, G.S. Measurement of strains by optical fiber Bragg grating sensors embedded into polymer composite material. Struct. Control Health Monit. 2017, 25, e2118. [Google Scholar] [CrossRef]
- Qiao, X.; Shao, Z.; Bao, W.; Rong, Q. Fiber Bragg grating sensors for the oil industry. Sensors 2017, 17, 429. [Google Scholar] [CrossRef]
- Ma, Z.; Chen, X. Fiber Bragg gratings sensors for aircraft wing shape measurement: Recent applications and technical analysis. Sensors 2019, 19, 55. [Google Scholar] [CrossRef] [Green Version]
- Agliullin, T.; Gubaidullin, R.; Sakhabutdinov, A.; Morozov, O.; Kuznetsov, A.; Ivanov, V. Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings. Sensors 2020, 20, 6191. [Google Scholar] [CrossRef]
- Ledyankin, M.A.; Mikhailov, S.A.; Nedel’ko, D.V.; Agliullin, T.A. Implementation of the Radiophotonic Method for Measuring Blade Deformations of a Helicopter Main Rotor Model. Russ. Aeronaut. 2020, 63, 767–770. [Google Scholar] [CrossRef]
- Morozov, O.; Sakhabutdinov, A.; Anfinogentov, V.; Misbakhov, R.; Kuznetsov, A.; Agliullin, T. Multi-Addressed Fiber Bragg Structures for Microwave-Photonic Sensor Systems. Sensors 2020, 20, 2693. [Google Scholar] [CrossRef] [PubMed]
- Nigmatullin, R.R.; Osokin, S.I.; Toboev, V.A. NAFASS: Discrete spectroscopy of random signals. Chaos Solitons Fractals 2011, 44, 226–240. [Google Scholar] [CrossRef]
- Pershin, S.M.; Bunkin, A.F.; Lukyanchenko, V.A.; Nigmatullin, R.R. Detection of the OH band fine structure in a liquid water by means of new treatment procedure based on the statistics of the fractional moments. Lazer Phys. Lett. 2007, 4, 809–812. [Google Scholar] [CrossRef]
- Nigmatullin, R.R.; Ionescu, C.; Baleanu, D. NIMRAD: Novel technique for respiratory data treatment. J. Signal Image Video Process. 2014, 8, 1517–1532. [Google Scholar] [CrossRef]
- Ciurea, M.L.; Lazanu, S.; Stavaracher, I.; Lepadatu, A.-M.; Iancu, V.; Mitroi, M.R.; Nigmatullin, R.R.; Baleanu, C.M. Stress-induced traps in multilayed structures. J. Appl. Phys. 2011, 109, 013717. [Google Scholar] [CrossRef] [Green Version]
- Cetin, S.S.; Băleanu, C.M.; Nigmatullin, R.R.; Băleanu, D.; Ozcelik, S. Chemical Bonding Structure of TiO2 Thin Films grown on N-Type Si. Thin Solid Film. 2011, 519, 5712–5719. [Google Scholar] [CrossRef]
- Băleanu, C.M.; Nigmatullin, R.R.; Cetin, S.S.; Băleanu, D.; Ozcelik, S. New method and treatment technique applied to interband transition in GaAs1-x Px ternary alloys. Cent. Eur. J. Phys. 2011, 9, 729–739. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nigmatullin, R.R.; Agliullin, T.; Mikhailov, S.; Morozov, O.; Sakhabutdinov, A.; Ledyankin, M.; Karimov, K. Noise Cancellation of Helicopter Blade Deformations Measurement by Fiber Bragg Gratings. Sensors 2021, 21, 4028. https://doi.org/10.3390/s21124028
Nigmatullin RR, Agliullin T, Mikhailov S, Morozov O, Sakhabutdinov A, Ledyankin M, Karimov K. Noise Cancellation of Helicopter Blade Deformations Measurement by Fiber Bragg Gratings. Sensors. 2021; 21(12):4028. https://doi.org/10.3390/s21124028
Chicago/Turabian StyleNigmatullin, Raoul R., Timur Agliullin, Sergey Mikhailov, Oleg Morozov, Airat Sakhabutdinov, Maxim Ledyankin, and Kamil Karimov. 2021. "Noise Cancellation of Helicopter Blade Deformations Measurement by Fiber Bragg Gratings" Sensors 21, no. 12: 4028. https://doi.org/10.3390/s21124028