
BIM and Computer Vision-Based Framework for Fire Emergency Evacuation Considering Local Safety Performance


Abstract
:1. Introduction
2. Related Work
2.1. Fire Emergency Management Based on BIM
2.2. GNM Extraction
2.3. Indoor Positioning and Computer Vision
2.4. Rescue Route Planning
3. Materials and Methods
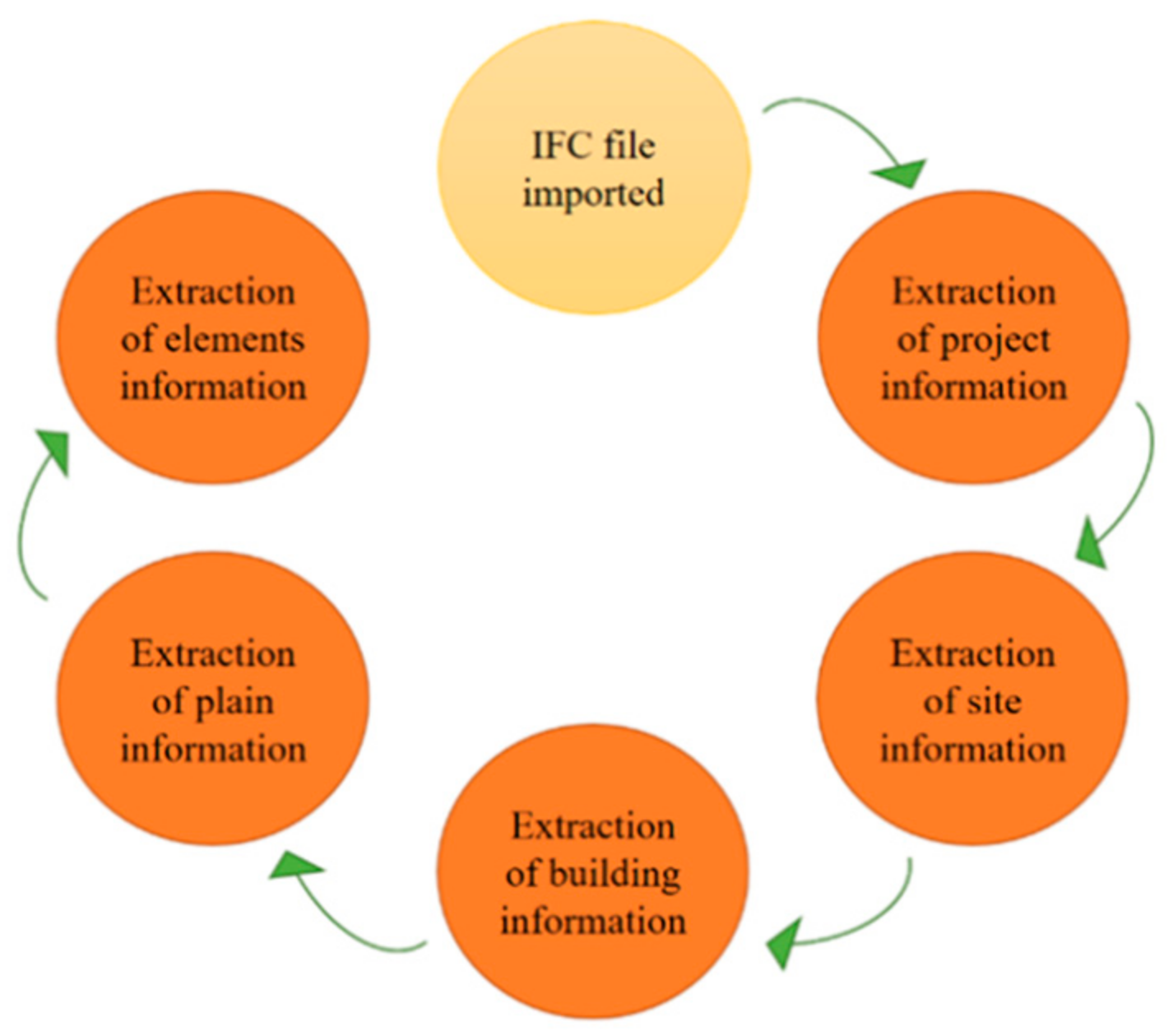
3.1. GNM Generation Module Based on IFC
- Corridor skeleton line: As the channel connecting rooms, if the geometric outline of corridor is simply reduced to a spatial node, it cannot reflect the real spatial topology information. Thus, corridor information should be extracted from the skeleton line of the corridor.
- Stair to corridor: The stair represents the vertical path connecting different floors. By extracting IfcStair, a staircase node is generated and adjacent staircase nodes are connected in sequence. The stair node is connected to the node closest to the corridor, so as to realize the connection of the vertical node and the horizontal path.
- Corridor to door: The topological relationship between corridor and door can be extracted from IfcRelSpaceBoundary. The nodes of all the doors are extracted and connected to the nearest point on the corridor route in turn.
- Room to door: The topological relationship between room and door is also recorded in the IfcRelSpaceBoundary attribute. Therefore, it is only necessary to traverse all the adjacent components in the room in IfcRelSpaceBoundary, searching for components belonging to IfcDoor and connecting the nodes.
3.2. Indoor Positioning Module Utilizing Computer Vision
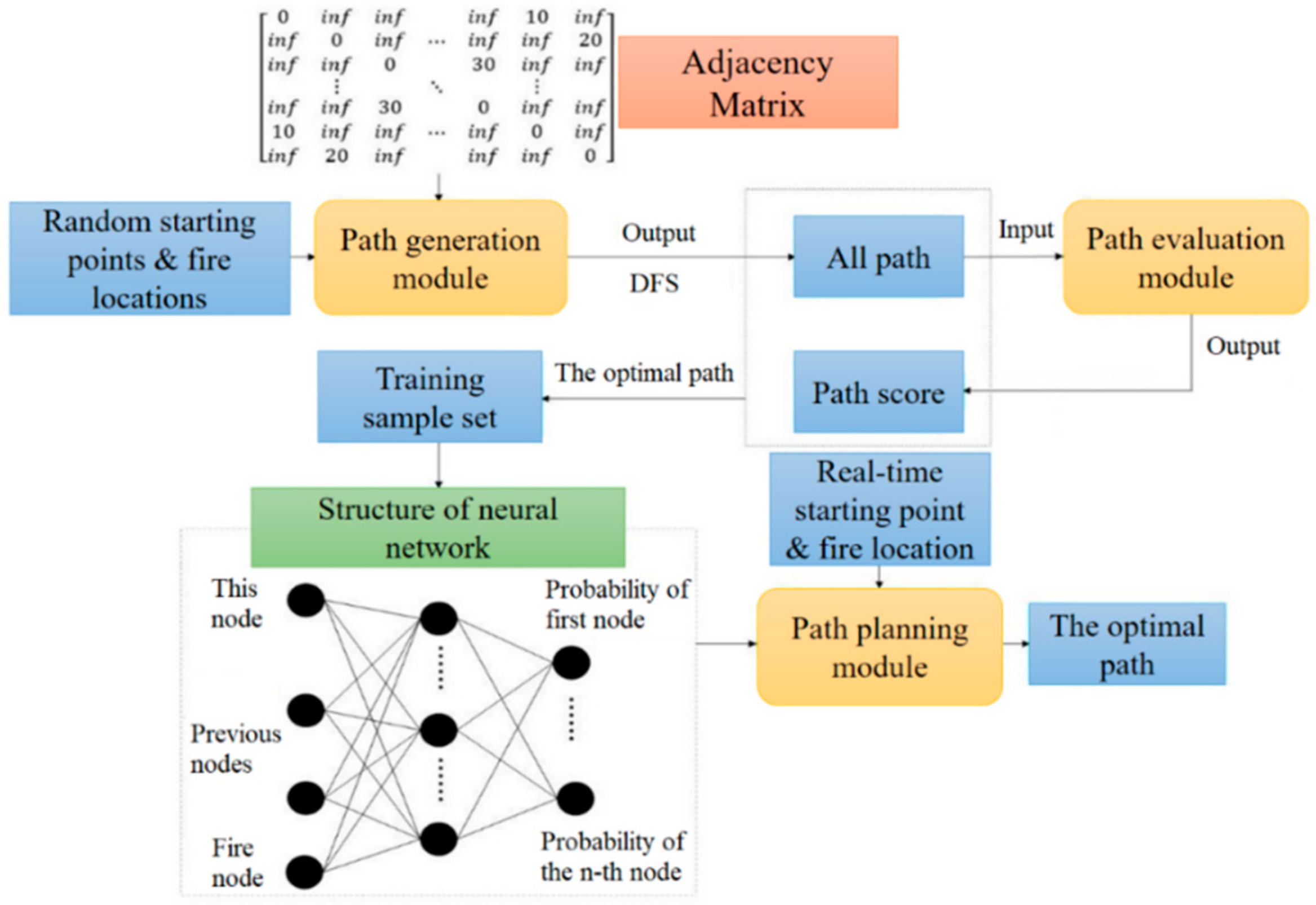
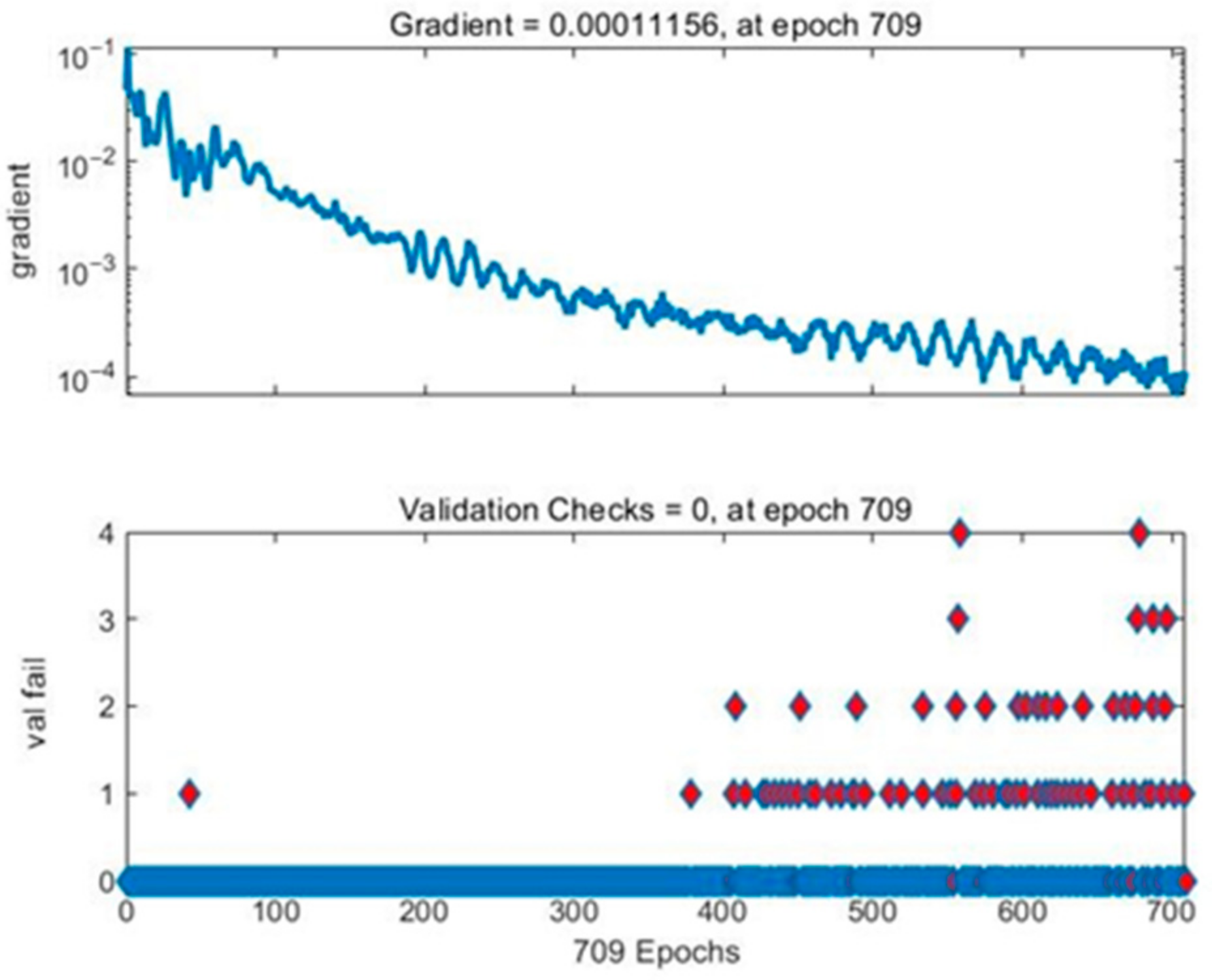
3.3. Path Planning Applying BP Neural Network
4. Results
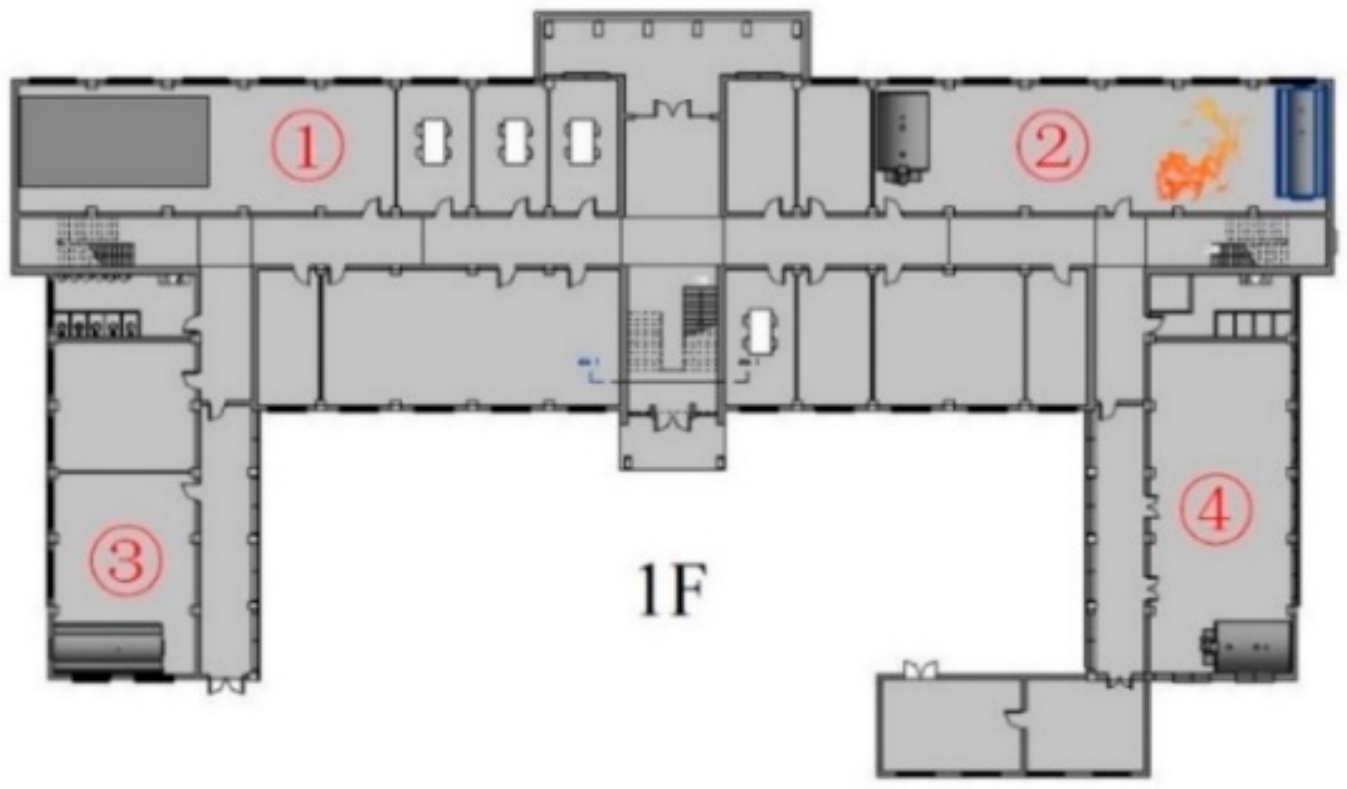
4.1. Generation of GNM
4.2. Indoor Local Positioning
4.3. Indoor Rescue Route Planning
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ministry of Emergency Management (MOEM), PRC, 233,000 Fires Nationwide Reported in 2019. 2020. Available online: https://www.119.gov.cn/article/3xBeEJjR54K (accessed on 26 February 2020).
- Qin, J.; Liu, C.; Huang, Q. Simulation on fire emergency evacuation in special subway station based on Pathfinder. Case Stud. Therm. Eng. 2020, 21, 100677. [Google Scholar] [CrossRef]
- Rodriguez, S.A.; De la Fuente, R.A.; Aguayo, M.M. A facility location and equipment emplacement technique model with expected coverage for the location of fire stations in the Concepción province, Chile. Comput. Ind. Eng. 2020, 147, 106522. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B.; Krishnamachari, B.; Soibelman, L. A BIM centered indoor localization algorithm to support building fire emergency response operations. Autom. Constr. 2014, 42, 78–89. [Google Scholar] [CrossRef]
- Long, Z.; Liu, C.; Yang, Y.; Qiu, P.; Tian, X.; Zhong, M. Full-scale experimental study on fire-induced smoke movement and control in an underground double-island subway station. Tunn. Undergr. Space Technol. 2020, 103, 103508. [Google Scholar] [CrossRef]
- Kim, S.; George, B.; Shekhar, S. Evacuation route planning: Scalable heuristics. In Proceedings of the 15th ACM International Symposium on Geographic Information Systems, ACM-GIS 2007, Seattle, WA, USA, 7–9 November 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Liu, G.-X.; Shi, L.-F.; Chen, S.; Wu, Z.-G. Focusing Matching Localization Method Based on Indoor Magnetic Map. IEEE Sens. J. 2020, 20, 10012–10020. [Google Scholar] [CrossRef]
- Kim, K.; Lee, Y.-C. Automated Generation of Daily Evacuation Paths in 4D BIM. Appl. Sci. 2019, 9, 1789. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Li, S.-W.; Hu, Z.-Z. A self-learning dynamic path planning method for evacuation in large public buildings based on neural networks. Neurocomputing 2019, 365, 71–85. [Google Scholar] [CrossRef]
- Fu, M.; Liu, R.; Qi, B.; Issa, R.R. Generating straight skeleton-based navigation networks with Industry Foundation Classes for indoor way-finding. Autom. Constr. 2020, 112, 103057. [Google Scholar] [CrossRef]
- Dinh, T.-M.T.; Duong, N.-S.; Sandrasegaran, K. Smartphone-Based Indoor Positioning Using BLE iBeacon and Reliable Lightweight Fingerprint Map. IEEE Sens. J. 2020, 20, 10283–10294. [Google Scholar] [CrossRef]
- Bullmann, M.; Fetzer, T.; Ebner, F.; Ebner, M.; Deinzer, F.; Grzegorzek, M. Comparison of 2.4 GHz WiFi FTM- and RSSI-Based Indoor Positioning Methods in Realistic Scenarios. Sensors 2020, 20, 4515. [Google Scholar] [CrossRef]
- Hatem, E.; Abou-Chakra, S.; Colin, E.; Laheurte, J.-M.; El-Hassan, B. Performance, Accuracy and Generalization Capability of RFID Tags’ Constellation for Indoor Localization. Sensors 2020, 20, 4100. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Huang, B.; Jia, B.; Zhao, L. Optimizing AP and Beacon Placement in WiFi and BLE hybrid localization. J. Netw. Comput. Appl. 2020, 164, 102673. [Google Scholar] [CrossRef]
- Lin, J.; Zhu, R.; Li, N.; Becerik-Gerber, B. How occupants respond to building emergencies: A systematic review of behavioral characteristics and behavioral theories. Saf. Sci. 2020, 122, 104540. [Google Scholar] [CrossRef]
- Qi, Y.; Pan, Z.; Zhang, S.; Hengel, A.; Wu, Q. Object-and-Action Aware Model for Visual Language Navigation. Computer Vision -ECCV 2020. In Proceedings of the 16th European Conference, Glasgow, UK, 23–28 August 2020; pp. 303–317. [Google Scholar] [CrossRef]
- Qi, Y.; Wu, Q.; Anderson, P.; Wang, X.; Wang, W.Y.; Shen, C.; Hengel, A. Reverie: Remote embodied visual referring expression in real indoor environments. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 9979–9988. [Google Scholar] [CrossRef]
- Hong, Y.; Wu, Q.; Qi, Y.; Rodriguez-Opazo, C.; Gould, S. A Recurrent Vision-and-Language BERT for Navigation. arXiv 2021, arXiv:2011.13922. [Google Scholar]
- Hong, Y.; Rodriguez-Opazo, C.; Qi, Y.; Wu, Q.; Gould, S. Language and Visual Entity Relationship Graph for Agent Navigation. arXiv 2020, preprint. arXiv:2010.09304. [Google Scholar]
- Skandhakumar, N.; Salim, F.; Reid, J.F.; Drogemuller, R.; Dawson, E. Graph theory based representation of building information models for access control applications. Autom. Constr. 2016, 68, 44–51. [Google Scholar] [CrossRef] [Green Version]
- Hamieh, A.; Ben Makhlouf, A.; Louhichi, B.; Deneux, D. A BIM-based method to plan indoor paths. Autom. Constr. 2020, 113, 103120. [Google Scholar] [CrossRef]
- Missel, J.; Mortari, D. Path optimization for Space Sweeper with Sling-Sat: A method of active space debris removal. Adv. Space Res. 2013, 52, 1339–1348. [Google Scholar] [CrossRef]
- Cheng, J.C.P.; Chen, K.; Wong, P.K.-Y.; Chen, W.; Li, C.T. Graph-based network generation and CCTV processing techniques for fire evacuation. Build. Res. Inf. 2021, 49, 179–196. [Google Scholar] [CrossRef]
- Díaz-Vilariño, L.; Boguslawski, P.; Khoshelham, K.; Lorenzo, H. Obstacle-Aware Indoor Pathfinding Using Point Clouds. ISPRS Int. J. Geo Inf. 2019, 8, 233. [Google Scholar] [CrossRef] [Green Version]
- Mirahadi, F.; McCabe, B.; Shahi, A. IFC-centric performance-based evaluation of building evacuations using fire dynamics simulation and agent-based modeling. Autom. Constr. 2019, 101, 1–16. [Google Scholar] [CrossRef]
- Ma, G.; Wu, Z. BIM-based building fire emergency management: Combining building users’ behavior decisions. Autom. Constr. 2020, 109, 102975. [Google Scholar] [CrossRef]
- Kim, J.Y.; Jeon, Y. The Case Analysis through Fire Simulation FDS and Evacuation Simulation Pathfinder. Asia Pac. J. Bus. Ventur. Entrep. 2015, 10, 253–260. [Google Scholar] [CrossRef]
- Bi, X.Y.; Wang, J.; Zhang, J.Y. The Exploration of BIM Technology Application in the Building Fire Emergency Plan. Appl. Mech. Mater. 2013, 357–360, 2473–2477. [Google Scholar] [CrossRef]
- Teo, T.-A.; Cho, K.-H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Lin, W.Y.; Lin, P.H. Intelligent generation of indoor topology (i-GIT) for human indoor pathfinding based on IFC models and 3D GIS technology. Autom. Constr. 2018, 94, 340–359. [Google Scholar] [CrossRef]
- Nassiri, M.; Baghersalimi, G.; Ghassemlooy, Z. A hybrid VLP and VLC system using m-CAP modulation and fingerprinting algorithm. Opt. Commun. 2020, 473, 125699. [Google Scholar] [CrossRef]
- Ma, Z.; Cai, S.; Mao, N.; Yang, Q.; Feng, J.; Wang, P. Construction quality management based on a collaborative system using BIM and indoor positioning. Autom. Constr. 2018, 92, 35–45. [Google Scholar] [CrossRef]
- Carrasco, U.; Coronado, P.D.U.; Parto, M.; Kurfess, T.; Carrasco, U.; Coronado, P.D.U. Indoor location service in support of a smart manufacturing facility. Comput. Ind. 2018, 103, 132–140. [Google Scholar] [CrossRef]
- La Delfa, G.C.; Monteleone, S.; Catania, V.; De Paz, J.F.; Bajo, J. Performance analysis of visualmarkers for indoor navigation systems. Front. Inf. Technol. Electron. Eng. 2016, 17, 730–740. [Google Scholar] [CrossRef]
- Li, X.; Lv, X.; Zhou, Y.; You, Z.; Chen, Y.; Cui, Z.; Diab, A. Homogeneity evaluation of hot in-place recycling asphalt mixture using digital image processing technique. J. Clean. Prod. 2020, 258, 120524. [Google Scholar] [CrossRef]
- Yeum, C.M.; Dyke, S.J. Vision-Based Automated Crack Detection for Bridge Inspection. Comput. Civ. Infrastruct. Eng. 2015, 30, 759–770. [Google Scholar] [CrossRef]
- Makantasis, K.; Protopapadakis, E.; Doulamis, A.; Doulamis, N.; Loupos, C. Deep Convolutional Neural Networks for efficient vision based tunnel inspection. In Proceedings of the 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; pp. 335–342. [Google Scholar] [CrossRef]
- Protopapadakis, E.; Makantasis, K.; Kopsiaftis, G.; Doulamis, N.; Amditis, A. Crack Identification via User Feedback, Convolutional Neural Networks and Laser Scanners for Tunnel Infrastructures. In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016), Rome, Italy, 27–29 February 2016; Science and Technology Publications: Setúbal, Portugal, 2016; pp. 725–734. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Bao, Y.; Chen, J.; Zuo, W.; Li, H. Surface fatigue crack identification in steel box girder of bridges by a deep fusion convolutional neural network based on consumer-grade camera images. Struct. Health Monit. 2018, 18, 653–674. [Google Scholar] [CrossRef]
- Kim, H.; Kim, K.; Kim, H. Vision-Based Object-Centric Safety Assessment Using Fuzzy Inference: Monitoring Struck-By Accidents with Moving Objects. J. Comput. Civ. Eng. 2016, 30, 04015075. [Google Scholar] [CrossRef]
- Park, M.-W.; Elsafty, N.; Zhu, Z. Hardhat-Wearing Detection for Enhancing On-Site Safety of Construction Workers. J. Constr. Eng. Manag. 2015, 141, 04015024. [Google Scholar] [CrossRef]
- Seo, J.; Starbuck, R.; Han, S.; Lee, S.; Armstrong, T.J. Motion Data-Driven Biomechanical Analysis during Construction Tasks on Sites. J. Comput. Civ. Eng. 2015, 29, 4014005. [Google Scholar] [CrossRef]
- Yang, J.; Arif, O.; Vela, P.A.; Teizer, J.; Shi, Z. Tracking multiple workers on construction sites using video cameras. Adv. Eng. Inform. 2010, 24, 428–434. [Google Scholar] [CrossRef]
- Dahiya, S. A Gaussian Filter based SVM Approach for Vehicle Class Identification. Int. J. Mod. Educ. Comput. Sci. 2015, 7, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Fang, Q.; Li, H.; Luo, X.; Li, C.; An, W. A sematic and prior--knowledge--aided monocular localization method for construction--related entities. Comput. Civ. Infrastruct. Eng. 2020, 35, 979–996. [Google Scholar] [CrossRef]
- Acharya, D.; Khoshelham, K.; Winter, S. BIM-PoseNet: Indoor camera localisation using a 3D indoor model and deep learning from synthetic images. ISPRS J. Photogramm. Remote. Sens. 2019, 150, 245–258. [Google Scholar] [CrossRef]
- Baykal, E.; Dogan, H.; Ercin, M.E.; Ersoz, S.; Ekinci, M. Transfer learning with pre-trained deep convolutional neural networks for serous cell classification. Multimed. Tools Appl. 2019, 79, 1–19. [Google Scholar] [CrossRef]
- Das, N.; Hussain, E.; Mahanta, L.B. Automated classification of cells into multiple classes in epithelial tissue of oral squamous cell carcinoma using transfer learning and convolutional neural network. Neural Netw. 2020, 128, 47–60. [Google Scholar] [CrossRef]
- Joshi, K.; Patel, M.I. Recent advances in local feature detector and descriptor: A literature survey. Int. J. Multimed. Inf. Retr. 2020, 9, 231–247. [Google Scholar] [CrossRef]
- Kubíčková, H.; Jedlička, K.; Fiala, R.; Beran, D. Indoor Positioning Using PnP Problem on Mobile Phone Images. ISPRS Int. J. Geo Inf. 2020, 9, 368. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Hadjisophocleous, G. A probabilistic occupant evacuation model for fire emergencies using Monte Carlo methods. Fire Saf. J. 2013, 58, 15–24. [Google Scholar] [CrossRef]
- Kong, D.; Lu, S.; Ping, P. Linking Safety Factor and Probability of Failure Based on Monte Carlo Simulation in Fire Safety Design. Fire Sci. Technol. 2016, 351–359. [Google Scholar] [CrossRef]
- Kurniawan, T.; Tambunan, L.; Imaniar, L.N. Fire Safety Parameters of High-Rise Residential Building: A Literature Review of Performance-Based Analysis Method. IOP Conf. Ser. Earth Environ. Sci. 2018, 152, 012030. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, X.; Wang, P.; Wu, Z.; Kim, M.J. Integration of BIM and GIS: Geometry from IFC to shapefile using open-source technology. Autom. Constr. 2019, 102, 105–119. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2012, 60, 1097–1105. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Xie, M. A Robust O(n) Solution to the Perspective-n-Point Problem. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1444–1450. [Google Scholar] [CrossRef] [PubMed]
- Ates, G.C.; Gorguluarslan, R.M. Two-stage convolutional encoder-decoder network to improve the performance and reliability of deep learning models for topology optimization. Struct. Multidiscip. Optim. 2021, 63, 1927–1950. [Google Scholar] [CrossRef]
- Kim, W.; Seok, J. Simulation acceleration for transmittance of electromagnetic waves in 2D slit arrays using deep learning. Sci. Rep. 2020, 10, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.-H. Contour Plots of Objective Functions for Feed-Forward Neural Networks. Int. J. Contents 2012, 8, 30–35. [Google Scholar] [CrossRef]
- Apstex, Inc. Apstex Home. 2018. Available online: http://www.apstex.com/ (accessed on 6 September 2019).
- Yang, J.; Zhou, Y.; Wang, W.; Xiangyang, L.I. Evolving deep neural network based multi-uav cooperative passive location with dynamic route planning. Sci. Technol. Rev. 2018, 36, 26–32. [Google Scholar] [CrossRef]
- Zou, M.; Xue, L.; Gai, H.; Dang, Z.; Wang, S.; Xu, P. Identification of the shear parameters for lunar regolith based on a GA-BP neural network. J. Terramech. 2020, 89, 21–29. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Existing Methods | The Proposed Method | |
|---|---|---|
| GNM extraction | Less consideration of semantic information; | Full consideration of semantic information; |
| Indoor positioning | Active; Expensive; Requiring pre-installed equipment; | Passive; Cheap; Without pre-installed equipment; |
| Rescue routing | Time-consuming; | Fast; Considering safety; |
| GNM Elements | Spatial Meanings | Spatial Elements | IFC Entity |
|---|---|---|---|
| Node | Space | Room | IfcSpace |
| Horizontal entrance | Door | IfcDoor | |
| Edge | Horizontal path | Corridor | IfcSpace |
| Vertical path | Room to door | IfcRelSpaceBoundary | |
| Corridor to door | IfcRelSpaceBoundary | ||
| Stair | IfcStair |
| Gnm Elements | Meaning | Element Name | Ifc Classes | Numbers |
|---|---|---|---|---|
| Node | Space | Room | IfcSpace | 64 |
| Space | Corridor | IfcSpace | 38 | |
| Horizontal protal | Door | IfcDoor | 74 | |
| Vertical protal | Stair area | IfcStairFlight | 5 | |
| Edge | Horizontal route | Corridor | IfcSpace | 42 |
| Horizontal route | Room-to-door | IfcRelSpaceBoundary | 74 | |
| Horizontal route | Door-to-corridor | IfcRelSpaceBoundary | 74 | |
| Vertical route | Stair | IfcStairFlight | 15 |
| Pixel Coordinate | X | Y |
|---|---|---|
| Control point#1 | 2206.489 | 2988.596 |
| Control point#2 | 2626.063 | 3382.856 |
| Control point#3 | 2668.052 | 1664.669 |
| Control point#4 | 2211.204 | 1673.515 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, H.; Ou, Z.; Zhang, G.; Deng, Y.; Tian, M. BIM and Computer Vision-Based Framework for Fire Emergency Evacuation Considering Local Safety Performance. Sensors 2021, 21, 3851. https://doi.org/10.3390/s21113851
Deng H, Ou Z, Zhang G, Deng Y, Tian M. BIM and Computer Vision-Based Framework for Fire Emergency Evacuation Considering Local Safety Performance. Sensors. 2021; 21(11):3851. https://doi.org/10.3390/s21113851
Chicago/Turabian StyleDeng, Hui, Zhibin Ou, Genjie Zhang, Yichuan Deng, and Mao Tian. 2021. "BIM and Computer Vision-Based Framework for Fire Emergency Evacuation Considering Local Safety Performance" Sensors 21, no. 11: 3851. https://doi.org/10.3390/s21113851