
An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems

Abstract
:1. Introduction
2. Problem Formulation
2.1. Parameter Definitions
2.2. Combinatorial Optimization Problem
3. Brief Introduction of the Conventional Variable Neighborhood Search Algorithm
| Algorithm 1. The Procedure of the Conventional VNS | |
| 1: | Let be the shaking neighborhood structures, and be the local search . Set . |
| 2: | Repeat |
| 3: | {Shaking procedure} |
| 4: | //Shaking procedure |
| 5: | {Local Search} |
| 6: | fortodo //Local search |
| 7: | //perform local search onwith neighborhood structure |
| 8: | if //checking ifis improved |
| 9: | |
| 10: | //turn to the first neighborhood structure for local search |
| 11: | else |
| 12: | //turn to the next neighborhood structure for local search |
| 13: | end for |
| 14: | {Accept decision} |
| 15: | if //checking if is improved |
| 16: | |
| 17: | //turn to the first neighborhood structure for shaking |
| 18: | else |
| 19: | //turn to the next neighborhood structure for shaking |
| 20: | end if |
| 21: | Until the upper limit of time or the maximum number of iterations is reached |
4. Integrated Mission Planning Framework Base on the Two-Level Adaptive Variable Neighborhood Search Algorithm
4.1. Overview of the Integrated Mission Planning Framework
| Algorithm 2. The Structure of the Mission Planning Framework Based on the Adaptive Two-Level Variable Neighborhood Search Algorithm | |
| 1: | Set the shaking neighborhoods structures of the first-level with and the shaking neighborhoods structures of the second-level with . Set the local search neighborhood structures of the first-level with , the local search neighborhood structures of the second-level with . Let , and . |
| 2: | {Initialization phase} |
| 3: | //generate an initial solution |
| 4: | Repeat |
| 5: | {First-Level Adaptive Shaking: Sensor allocation} //first-level |
| 6: | //Adaptive select the shaking neighborhood structure, the UAVs, and sensors for shaking |
| 7 | //generate the shaking solution according to shaking neighborhoods structure. |
| 8: | {First-Level Local Search Phase: Sensor allocation} |
| 9: | while |
| 10: | //perform local search onaccording to local search neighborhoods structure. |
| 11: | while//second-level |
| 12: | {Second-Level Shaking Phase: Route Planning} |
| 13: | //generate the shaking solution of the second-level base on the shaking neighborhoods structure. |
| 14: | {Second-Level Local Search Phase: Route Planning} |
| 15: | while |
| 16: | //perform local search onaccording to local search neighborhoods structure. |
| 17: | if |
| 18: | |
| 19: | |
| 20: | else |
| 21: | |
| 22: | end if |
| 23: | end while |
| 24: | end while |
| 25: | {Acceptance decision} |
| 26: | iforis accepted |
| 27: | |
| 28: | |
| 29: | else |
| 30: | |
| 31: | end if |
| 32: | end while |
| 33: | Until the upper limit of time or a given number of iterations without improvement is reached |
4.2. Initial Solution
4.3. Adaptive Shaking and Local Search of the First-Level
4.3.1. Shaking Neighborhood Structures of the First-Level
- 1.
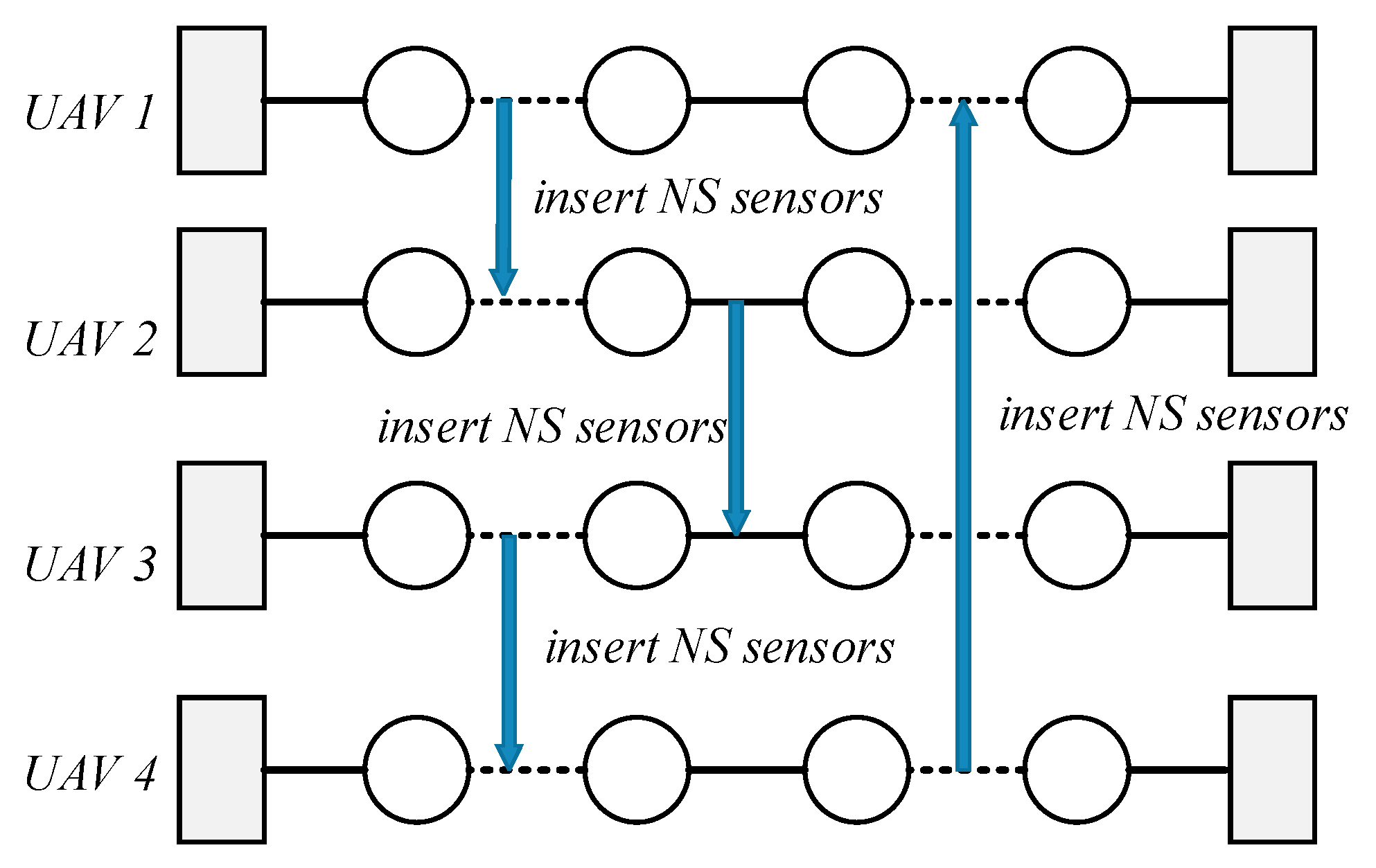
- Sensor cyclic exchange operator: The sensor cyclic exchange operator will exchange the sensors currently loaded by the heterogeneous multi-UAVs system cyclically. An example of a sensor cyclic exchange operator is shown in Figure 2. Two critical parameters are involved in the sensor cyclic exchange operator: The number of heterogeneous UAVs involved in the shaking procedure and the maximum number of sensors to be exchanged .
- 2.
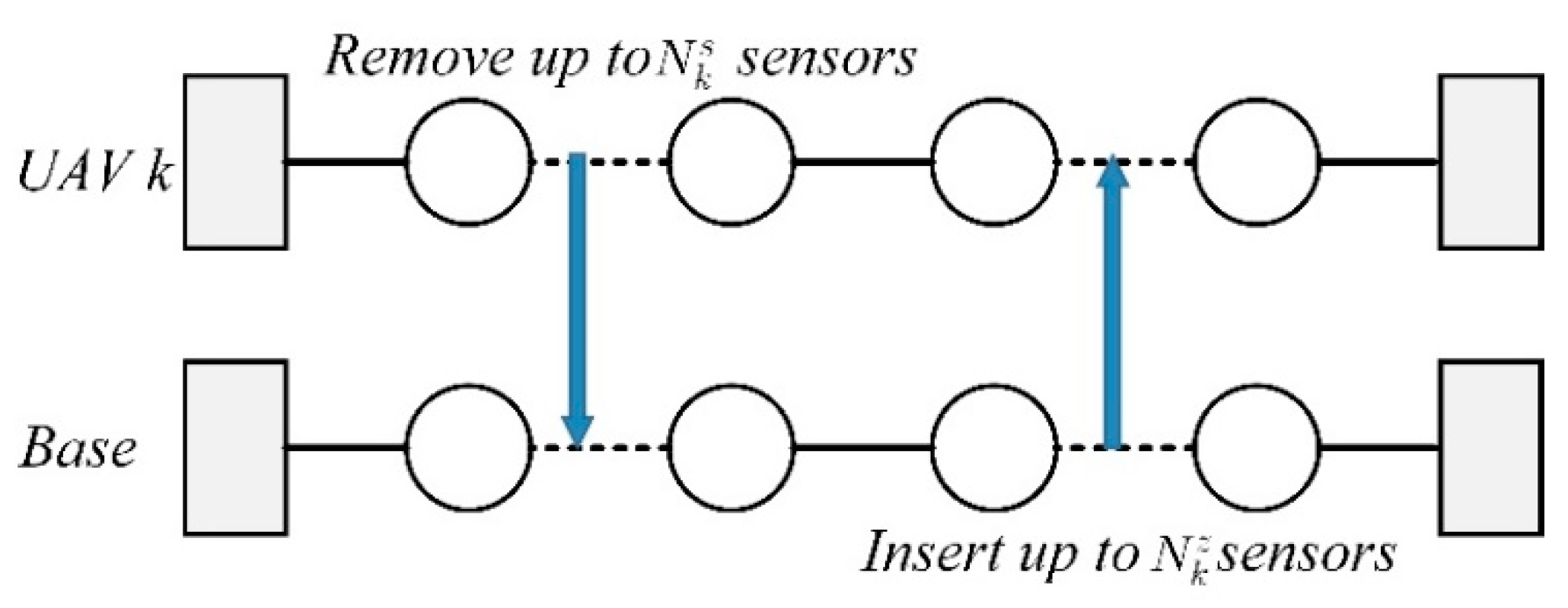
- Unbalanced exchange operator: For the heterogeneous UAV , the unbalanced delete & insert operator will delete up to sensors from the sensor set . Then, up to sensors will be selected from the sensor set and inserted in the sensor set . Notice that the number of sensors deleted from the sensor set maybe not equal to the number of sensors inserted. Similarly, the constraints (5), (6), (9) and (10) cannot be violated in this neighborhood structure. An example of an unbalanced exchange operator is shown in Figure 3.
4.3.2. Adaptive Mechanism
- Random: The heterogeneous UAVs in the current solution have the same probability to be selected.
- Largest remaining load: The selection probability of a heterogeneous UAV is proportional to its remaining load. The goal is to optimize the sensor configuration for the UAV with the largest remaining load.
- Maximum number of visit targets: The probability of the heterogeneous UAV being selected is proportional to the number of visit targets. The goal is to optimize the sensor configuration of the heterogeneous UAV with the maximum number of visit targets.
- Random: All the sensors involved loaded by the selected heterogeneous UAV have the same probability of being selected.
- Total task profit: For the selected UAV, the selection probability of the sensor is inversely proportional to the total task profit. The goal is to assign sensors with higher total task profit to the selected UAV.
- Travel distance reduction: For the selected UAV, the selection probability of the sensor is proportional to the travel distance reduction. The goal is to remove the sensor with higher travel distance reduction to increase the maximum travel distance of the selected UAV.
4.3.3. Local Search Neighborhood Structures of the First-Level
- Insertion operator: The operator will randomly select a sensor from the sensor set and insert it into the sensor set loaded on a UAV .
- Exchange operator: The operator will randomly exchange a sensor with a sensor , where , , and .
- 2-exchange operator: Similar to the exchange operator, the 2-exchange will randomly exchange two sensors in with two sensors in , where and .
- 1-deletion-1-insertion operator: The operator will delete a sensor from and insert another sensor from to .
- 2-deletion-2-insertion operator: The operator will delete two sensors from and add them to . Then, two sensors from is inserted to .
4.4. Shaking and Local Search of the Second-Level
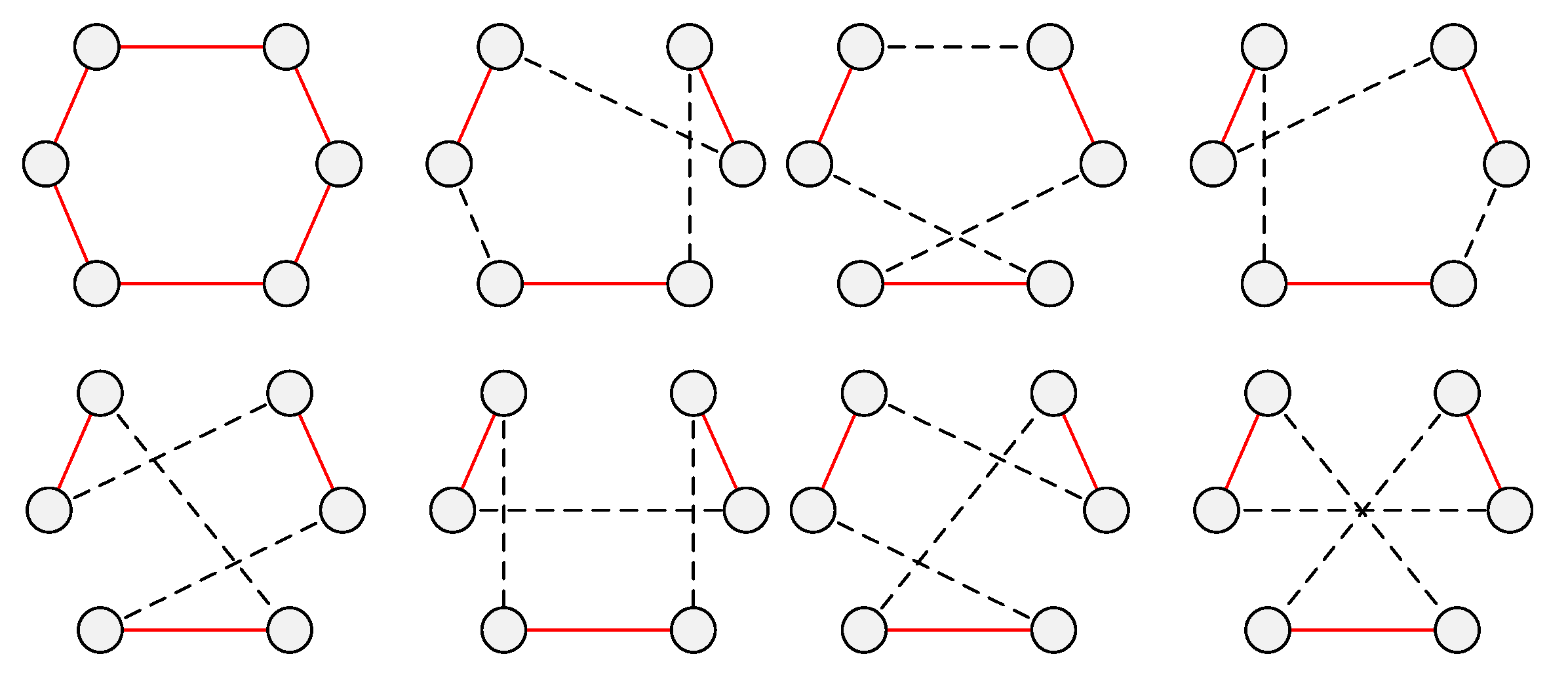
- Intraroute 3-opt: The interroute 3-opt operator is an extension of the 2-opt operator, which is used to change the visit sequence of the nodes in a route. As shown in Figure 4, eight forms of the intraroute 3-opt operator are given, and one of them will be randomly selected.
- Interroute 2-exchange: The interroute 2-exchange operator randomly exchanges two pairs of nodes in two different routes.

- Intraroute 2-opt: The intraroute 2-opt operator will reverse the nodes visit sequence of a sub-route.
- Intraroute or-opt: The intraroute or-opt operator relocates several consecutive nodes in a route. An example of intraroute 2-opt and intraroute or-opt are shown in Figure 5.
- 3.
- Interroute exchange: The interroute exchange operator randomly exchanges two nodes in the same route.
- 4.
- Interroute relocated: The interroute relocated randomly delete a node from a route and insert it to another route. An example of interroute exchange and interroute relocated is shown in Figure 6.
4.5. Collision-Free Path Planning
- Map preprocessing. In this stage, the continuous space is discretized based on the target location and the fixed point of the obstacle. Note that this procedure is only evaluated once when the objective function value is calculated for the first time. The visibility map is adopted in this stage to discretize the space efficiently.
- Route assessment. The route assessment stage is used to calculate the objective value of the solutions in the iterative process. In this stage, the A * algorithm is adopted to generate the shortest polyline path connecting the UAV’s initial location and target location sequence.
- Path smoothing. As a postprocessing stage, this stage is used to optimize the path of the final solution. The polyline path of the UAV mentioned above is smoothed to generate a collision-free trajectory satisfying the kinematic constraints of the UAV.
4.6. Acceptance Decision
5. Simulation and Discussion
5.1. Feasibility Verification
5.1.1. Test Scenario and Parameter Settings
5.1.2. Feasibility Analysis
5.2. Numerical Comparisons
5.2.1. Experimental Conditions
5.2.2. Monte Carlo Study
6. Limitation Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rasmussen, S.J.; Shima, T. Tree search algorithm for assigning cooperating UAVs to multiple tasks. Int. J. Robust Nonlinear Control 2008, 18, 135–153. [Google Scholar] [CrossRef]
- Zhu, A.; Yang, S.X. A neural network approach to dynamic task assignment of multirobots. IEEE Trans. Neural Netw. 2006, 17, 1278–1287. [Google Scholar]
- Shima, T.; Rasmussen, S.J.; Sparks, A.G.; Passino, K.M. Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms. Comput. Oper. Res. 2006, 33, 3252–3269. [Google Scholar] [CrossRef]
- Eun, Y.; Bang, H. Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithm. J. Aircr. 2009, 46, 338–343. [Google Scholar] [CrossRef]
- Zhen, Z.; Xing, D.; Gao, C. Cooperative search-attack mission planning for multiUAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Zhu, Z.; Tang, B.; Yuan, J. Multirobot task allocation based on an improved particle swarm optimization approach. Int. J. Adv. Robot. Syst. 2017, 14, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Chen, L.; Zhou, Y.; Zheng, D.; Pan, H. An improved a* algorithm for the industrial robot path planning with high success rate and short length. Rob. Autom. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Faust, A.; Ramírez, O.; Fiser, M.; Oslund, K.; Francis, A.; Davidson, J.O.; Tapia, L. PRM-RL: Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-Based Planning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5113–5120. [Google Scholar]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 31–36. [Google Scholar]
- Pfeiffer, M.; Schaeuble, M.; Nieto, J.; Siegwart, R.; Cadena, C. From perception to decision: A data-driven approach to end-to-end motion planning for autonomous ground robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1527–1533. [Google Scholar]
- Yuan, C.R.; Liu, G.F.; Zhang, W.Q.; Pan, X.L. An efficient RRT cache method in dynamic environments for path planning. Rob. Autom. Syst. 2020, 131, 103594. [Google Scholar] [CrossRef]
- Isaiah, P.; Shima, T. Motion planning algorithms for the dubins travelling salesperson problem. Automatica 2015, 53, 247–255. [Google Scholar] [CrossRef]
- Edison, E.; Shima, T. Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Comput. Oper. Res. 2011, 38, 340–356. [Google Scholar] [CrossRef]
- Deng, Q.; Yu, J.; Wang, N. Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes. Chin. J. Aeronaut. 2013, 26, 1238–1250. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Liu, L.; Long, T.; Wen, Y. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chin. J. Aeronaut. 2017, 31, 339–350. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, D.; Yu, J. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2853–2872. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, J.; Ai, X.; Xu, X.; Yang, D. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm. Aerosp. Sci. Technol. 2018, 76, 112–125. [Google Scholar] [CrossRef]
- Mufalli, F.; Batta, R.; Nagi, R. Simultaneous sensor selection and routing of unmanned aerial vehicles for complex mission plans. Comput. Oper. Res. 2012, 39, 2787–2799. [Google Scholar] [CrossRef]
- Deng, D.; Jing, W.; Fu, Y.; Huang, Z.; Liu, J.; Shimada, K. Constrained Heterogeneous Vehicle Path Planning for Large-area Coverage. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4113–4120. [Google Scholar] [CrossRef] [Green Version]
- Causa, F.; Fasano, G. Multiple UAVs trajectory generation and waypoint assignment in urban environment based on DOP maps. Aerosp. Sci. Technol. 2021, 110, 106507. [Google Scholar] [CrossRef]
- Causa, F.; Fasano, G.; Grassi, M. Multi-UAV Path Planning for Autonomous Missions in Mixed GNSS Coverage Scenarios. Sensors 2018, 18, 4188. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Lim, G.; Cho, J.; Côté, M. Drone-Aided Healthcare Services for Patients with Chronic Diseases in Rural Areas. J. Intell. Rob. Syst. Theor. Appl. 2017, 88, 163–180. [Google Scholar] [CrossRef]
- Lim, G.T.; Kim, S. Drone Delivery Scheduling Optimization Considering Payload-induced Battery Consumption Rates. J. Intell. Rob. Syst. Theor. Appl. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Bello-Orgaz, G.; R-Moreno, M.D.; Camacho, D. Solving complex multi-UAV mission planning problems using multi-objective genetic algorithms. Soft Comput. 2016, 21, 4883–4900. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Ser, D.J.; Camacho, D. Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. Swarm Evolut. Comput. 2019, 44, 480–495. [Google Scholar] [CrossRef]
- Wu, W.; Wang, X.; Cui, N. Fast and coupled solution for cooperative mission planning of multiple heterogeneous unmanned aerial vehicles. Aerosp. Sci. Technol. 2018, 79, 131–144. [Google Scholar] [CrossRef]
- Luo, R.; Zheng, H.; Guo, J. Solving the Multi-Functional Heterogeneous UAV Cooperative Mission Planning Problem Using Multi-Swarm Fruit Fly Optimization Algorithm. Sensors 2020, 20, 5026. [Google Scholar] [CrossRef] [PubMed]
- Deng, Q.; Yu, J.; Mei, Y. Deadlock-free consecutive task assignment of multiple heterogeneous unmanned aerial vehicles. J. Aircr. 2014, 51, 596–605. [Google Scholar] [CrossRef]
- Mladenovi’c, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Wei, L.; Zhang, Z.; Lim, A. An adaptive variable neighborhood search for a heterogeneous fleet vehicle routing problem with three-dimensional loading constraints. IEEE Comput. Intell. Mag. 2014, 9, 18–30. [Google Scholar] [CrossRef]
- Kuo, Y.; Wang, C.C. A variable neighborhood search for the multi-depot vehicle routing problem with loading cost. Expert Syst. Appl. 2012, 39, 6949–6954. [Google Scholar] [CrossRef]
- Polacek, M.; Hartl, R.F.; Doerner, K.; Reimann, M. A variable neighborhood search for the multi depot vehicle routing problem with time windows. J. Heuristics 2004, 10, 613–627. [Google Scholar] [CrossRef] [Green Version]
- Hemmelmayr, V.C.; Doerner, K.F.; Hartl, R.F. A variable neighborhood search heuristic for periodic routing problems. Eur. J. Oper. Res. 2009, 195, 791–802. [Google Scholar] [CrossRef] [Green Version]
- Warrier, A. A Decision Support Tool for the Inventory Allocation and Vehicle Routing Problem. Ph.D. Thesis, State University of New York at Buffalo, Buffalo, NY, USA, 2001. [Google Scholar]
- Clarke, G.; Wright, J.W. Scheduling of vehicles from a central depot to a number of delivery points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Operator | () | () | ID | Operator | () | () |
|---|---|---|---|---|---|---|---|
| 1 | Unbalanced exchange operator | 1 | 1 | 8 | Sensor cyclic exchange | 3 | 1 |
| 2 | Unbalanced exchange operator | 1 | 2 | 9 | Sensor cyclic exchange | 3 | 2 |
| 3 | Unbalanced exchange operator | 2 | 1 | 10 | Sensor cyclic exchange | 3 | 3 |
| 5 | Sensor cyclic exchange | 2 | 1 | 11 | Sensor cyclic exchange | 4 | 1 |
| 6 | Sensor cyclic exchange | 2 | 2 | 12 | Sensor cyclic exchange | 4 | 2 |
| 7 | Sensor cyclic exchange | 2 | 3 | 13 | Sensor cyclic exchange | 4 | 3 |
| Sensor | Quantity | Weight | Travel Distance Reduction (m) |
|---|---|---|---|
| S1 | 3 | 125 | 2500 |
| S2 | 6 | 100 | 2000 |
| S3 | 4 | 75 | 1500 |
| UAV | Load Limit | Travel Distance (m) | Cruising Speed (m/s) | Minimum Turning Radius (m) | Sensor Capacity |
|---|---|---|---|---|---|
| U1 | 200 | 11,000 | 20 | 45 | 2 |
| U2 | 240 | 12,000 | 20 | 45 | 2 |
| U3 | 175 | 10,000 | 20 | 45 | 2 |
| U4 | 220 | 13,000 | 20 | 45 | 2 |
| T1-T3 | T4-T6 | T7-T9 | T10-T12 | T13-T15 | T16-T18 | T19-T21 | T22-T25 | T26-T28 | T29-T31 | |
|---|---|---|---|---|---|---|---|---|---|---|
| S1 | 72 | 24 | 46 | 35 | 12 | 83 | 42 | 52 | 23 | 42 |
| S2 | 98 | 92 | 88 | 62 | 45 | 67 | 57 | 84 | 46 | 54 |
| S3 | 44 | 75 | 37 | 27 | 29 | 23 | 44 | 45 | 57 | 36 |
| Sensors #1 | Sensors #2 | Load Limit | Sensors Weight | Maximum Travel Distance | Task Profit | Travel Distance | |
|---|---|---|---|---|---|---|---|
| UAV1 | S2 | S3 | 200 | 175 | 7500 | 764 | 3920.98 |
| UAV2 | S1 | S2 | 240 | 225 | 7500 | 1129 | 4425.97 |
| UAV3 | S2 | S3 | 175 | 175 | 6500 | 944 | 3955.63 |
| UAV4 | S2 | S2 | 220 | 200 | 9000 | 1054 | 2882.15 |
| Case ID | Task Quantity | UAV Quantity | Sensor Type | Sensor Quantity | UAV Sensor Capacity | Mission Area m2 |
|---|---|---|---|---|---|---|
| 1 | 20 | 3 | 6 | 24 | 3 | 2000 × 2000 |
| 2 | 30 | 4 | 6 | 40 | 3 | 2000 × 2000 |
| 3 | 40 | 5 | 6 | 60 | 4 | 2000 × 2000 |
| 4 | 50 | 4 | 8 | 32 | 3 | 4000 × 4000 |
| 5 | 60 | 5 | 8 | 50 | 3 | 4000 × 4000 |
| 6 | 70 | 6 | 8 | 64 | 4 | 4000 × 4000 |
| 7 | 80 | 6 | 12 | 48 | 4 | 6000 × 6000 |
| 8 | 90 | 7 | 12 | 70 | 5 | 6000 × 6000 |
| 9 | 100 | 8 | 12 | 96 | 6 | 6000 × 6000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, H.; Yuan, J. An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems. Sensors 2021, 21, 3557. https://doi.org/10.3390/s21103557
Zheng H, Yuan J. An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems. Sensors. 2021; 21(10):3557. https://doi.org/10.3390/s21103557
Chicago/Turabian StyleZheng, Hongxing, and Jinpeng Yuan. 2021. "An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems" Sensors 21, no. 10: 3557. https://doi.org/10.3390/s21103557