1. Introduction
Global navigation satellite system (GNSS) precise positions can be determined conventionally using real-time precise point positioning (PPP) and real-time kinematic (RTK) techniques [
1,
2,
3,
4,
5,
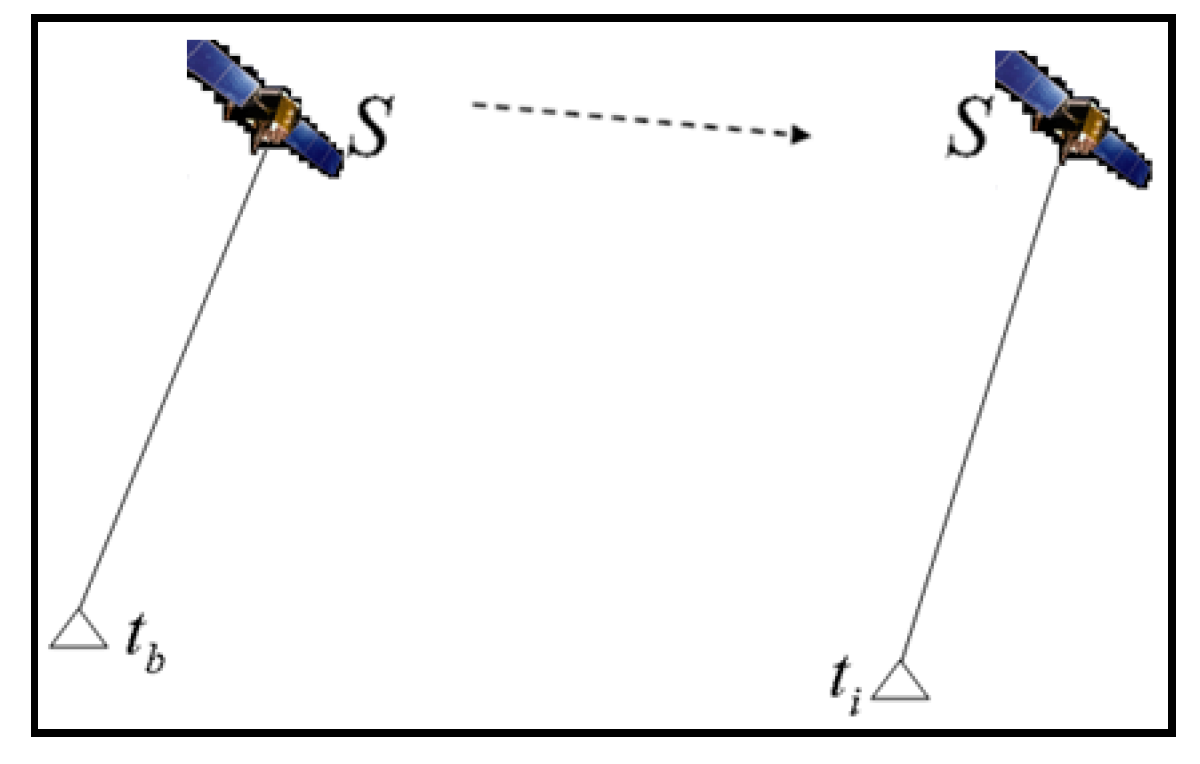
6]. These techniques need external support from a data center or reference stations to reduce various GNSS errors. Unlike these techniques, time-relative positioning computes the difference in positions of a single receiver at two epochs, as shown in
Figure 1 [
7,
8,
9,
10].
Suppose that a GNSS receiver is first placed at station
to collect GNSS data at epoch
and then the receiver is moved to station
to record the GNSS observations at epoch
. The following two observation equations differenced between satellites can be formed with two sets of observations [
11]:
where
and
are the coordinate vectors of stations
and
, respectively;
and
are the ambiguity vector and zenith tropospheric delay, respectively;
,
,
,
, and
are their corresponding coefficients; and
and
are ionosphere-free phase design vectors for stations
and
, respectively.
When neglecting the differences between
and
and the differences between
and
, the relative position between stations
and
can be calculated by performing the following time-differencing between the two sessions of GNSS data:
where
, and
. The absolute position of station
can be determined from the position difference
with respect to station
.
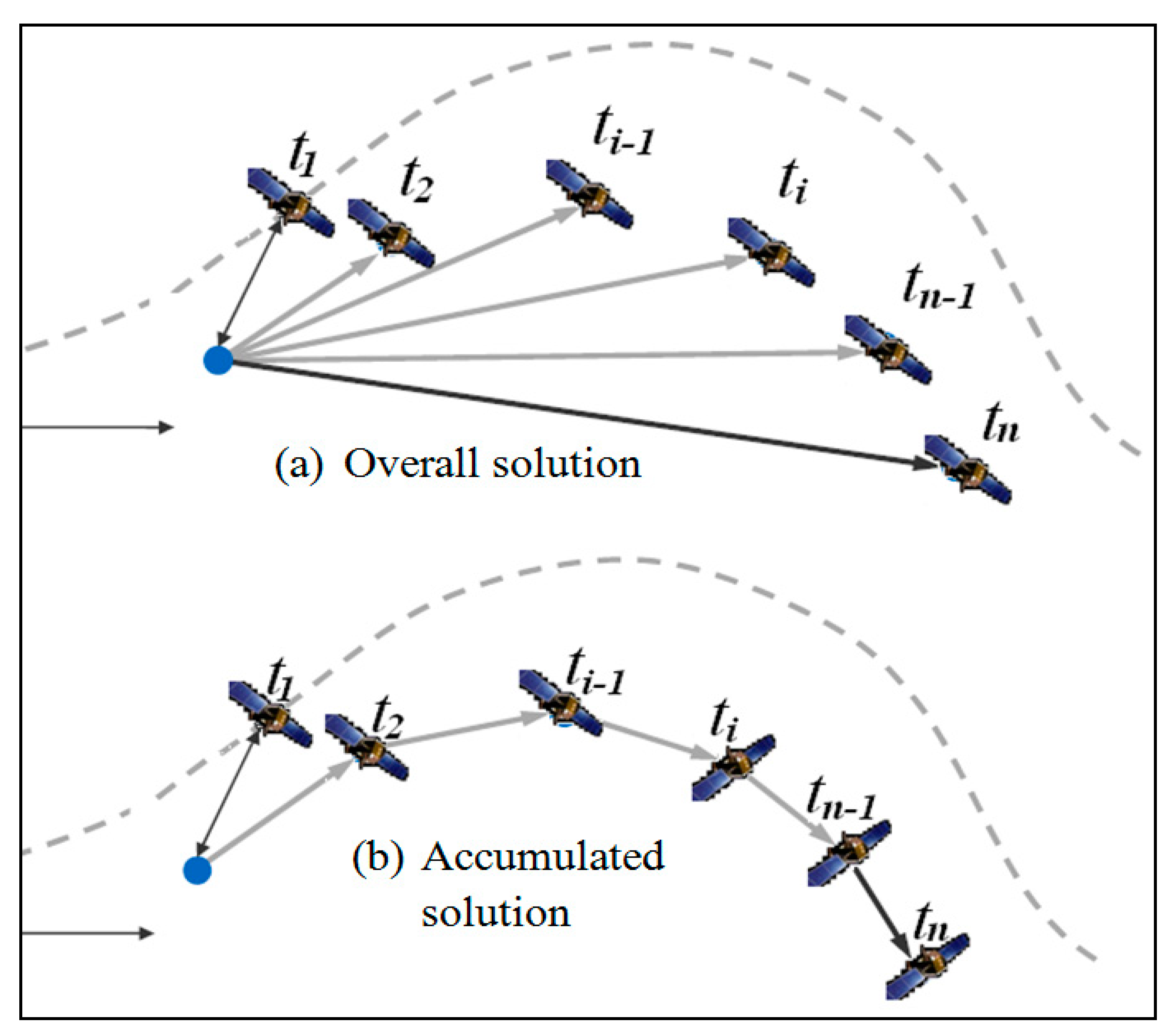
The method in
Figure 1 considers only two sessions of observations, and is often called overall time-relative positioning. Another time-relative positioning method—the accumulated time-relative method—has since been proposed [
9]. A comparison of the two methods is presented in
Figure 2, and it can be seen that the overall time-relative positioning method takes account of only two sessions of observations, while the accumulated time-relative positioning method considers all epochs during the movement.
Similar to Equations (1) and (2), the following equations (differenced between satellites) can be formed using the accumulated method:
where, 1, 2,
,
and
are epoch indexes.
Neglecting the difference between
and
and
and
and performing time-difference between equations of any two adjacent epochs, we obtain
The difference between positions can be determined using the weighted least-squares adjustment method:
where
is the weight matrix based on elevation angle,
.
where
is the standard deviation of carrier phase observation noise, which is generally 3 mm;
is the elevation angle of satellite
.
The precise relative position between epochs 1 and
is given as
Previous studies show that the accumulated time-relative method can provide better positioning accuracy than the overall time-relative method [
12] especially under poor data quality; thus, its use is often preferred in practical applications [
13,
14].
Compared with conventional real-time PPP and RTK, time-relative positioning has many advantages. First, as only phase observations of one receiver are used, the positioning performance is not affected by the noise and multipath from the code observations. Second, the relative position can be acquired immediately after GNSS observations are recorded. Third, the method is reliable, since the ambiguity resolution is not required. Last, it does not require RTK data transmission, so it is a precise positioning method suitable for remote areas without wireless communication. For example, in parts of Tibet or Xinjiang province of China, network RTK or real-time PPP is not available because the GPRS or WiFi data link is not available, yet time-relative positioning can still be widely used when surveying these areas.
Due to the outstanding advantages of the time-relative method, it has been widely used in applications including engineering surveying and mapping [
13], ocean navigation [
14], airplane navigation [
12], altitude determination [
7] and seismic monitoring [
15,
16]. However, the major limitation of time-relative positioning is that its positioning error may be greater than that of the space-relative positioning method. Positioning accuracy degrades rapidly when the duration between observations increases. A time-relative positioning approach with loop misclosure corrections has been proposed to improve its performance [
9]. However, this requires the user to return to the starting point after a period of time, and this makes the process of positioning very complex. Therefore, the applications of time-relative positioning are not as popular as RTK and PPP. In practical applications, the time-relative method is mainly used for short time applications, such as one epoch for a cycle slip detection and correction [
17], one minute for marine applications [
14], several minutes for seismic applications [
15], and about twenty minutes for engineering applications [
13,
16]. Rapid accuracy degradation means the method cannot meet the requirements of precise positioning and navigation applications over a longer timeframe.
In this study, the time-relative positioning method is improved so that it can be used for precise positioning and navigation applications over longer periods of time, especially in remote areas without wireless communication. First, the main error sources of the accumulated time-relative method are analyzed. Then, we propose measures to improve the performance of the positioning method. Finally, the positioning performance of the proposed method is assessed for applications over long time periods and conclusions are drawn.
2. Materials and Methods
As the time-relative positioning method is based on a single receiver, the preprocessing process should be the same as PPP in order to remove or reduce as many errors as possible such as carrier phase windup effect, solid earth tide, ocean tide loading, satellite antenna phase center offset, etc. Then, for epochs
and
, the observation equations are given as follows: [
18,
19]
and
where
is the orbital error and
is the satellite clock error.
Forming a difference between Equations (8) and (9), we can get the following two equations:
and
After correcting with a tropospheric model, the temporal variation of the remaining tropospheric error is normally very small. Thus, the tropospheric part
can be neglected and we will have
Comparing Equation (12) with (3) and (5), we can see that four parts are neglected when forming the time-relative observation equations: , , and . The first part relates to the initial coordinate error when linearizing observation equations. The second part is related to tropospheric delay, and the third and fourth parts are related to the orbital and clock errors of broadcast ephemeris, respectively.
As the dry tropospheric delay can be removed almost completely with the tropospheric model and the remaining wet model, after time differencing, generally has a much smaller effect on the positioning than the initial coordinate error and the orbital and clock errors. Therefore, this error can normally be neglected. The effects of the initial coordinate error and the orbital and clock errors will be analyzed in detail in this section.
2.1. Initial Coordinate Error
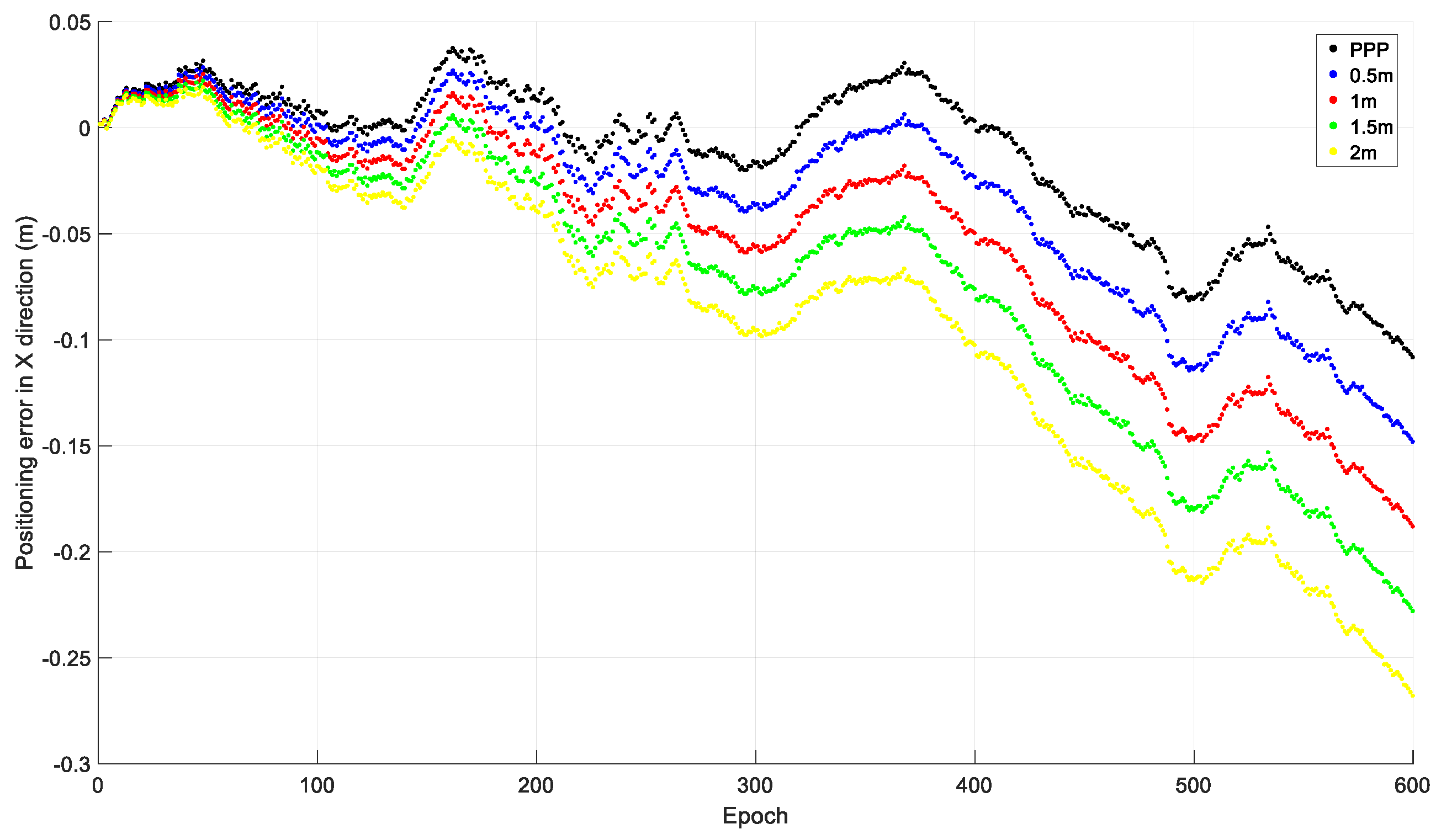
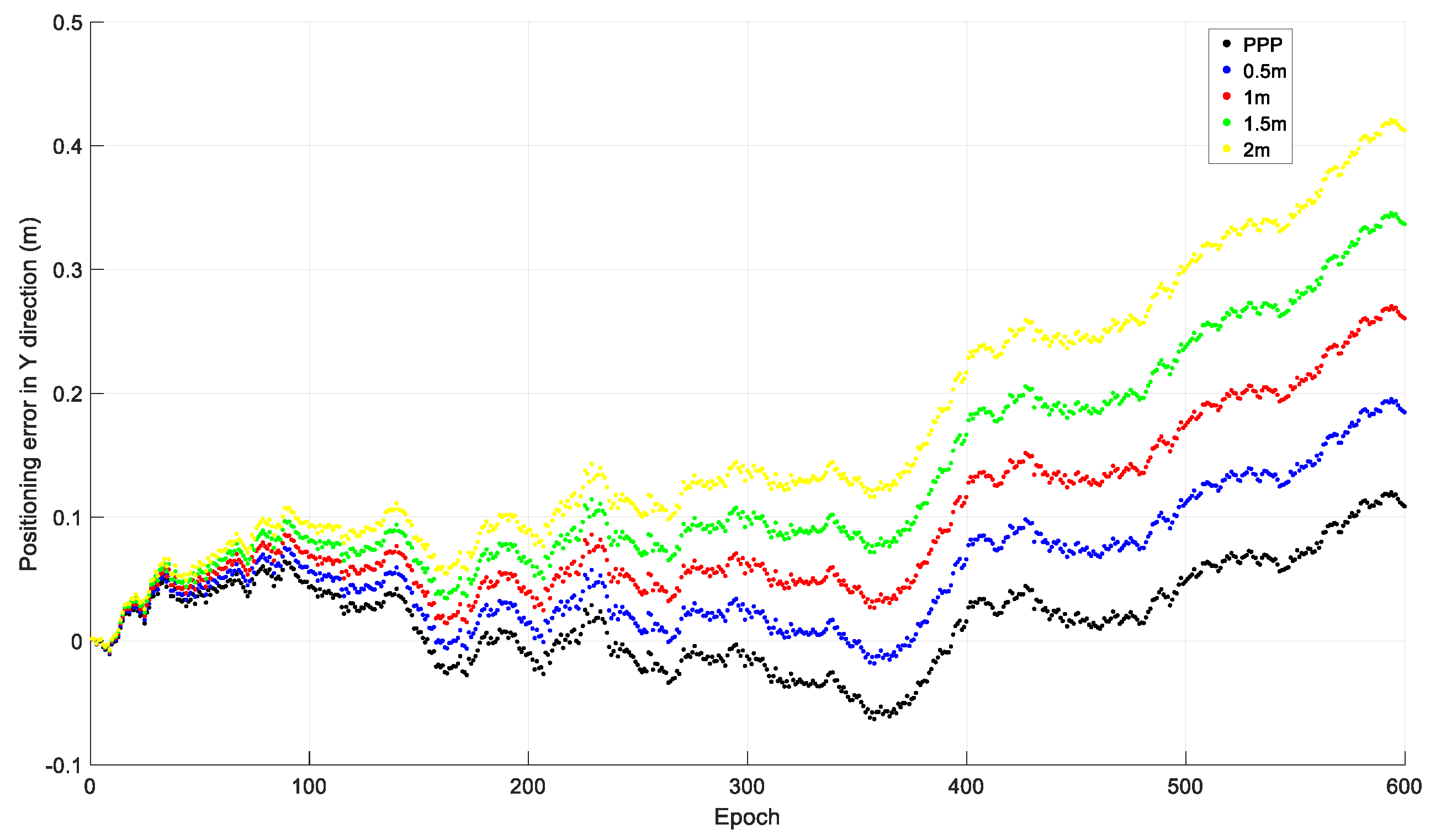
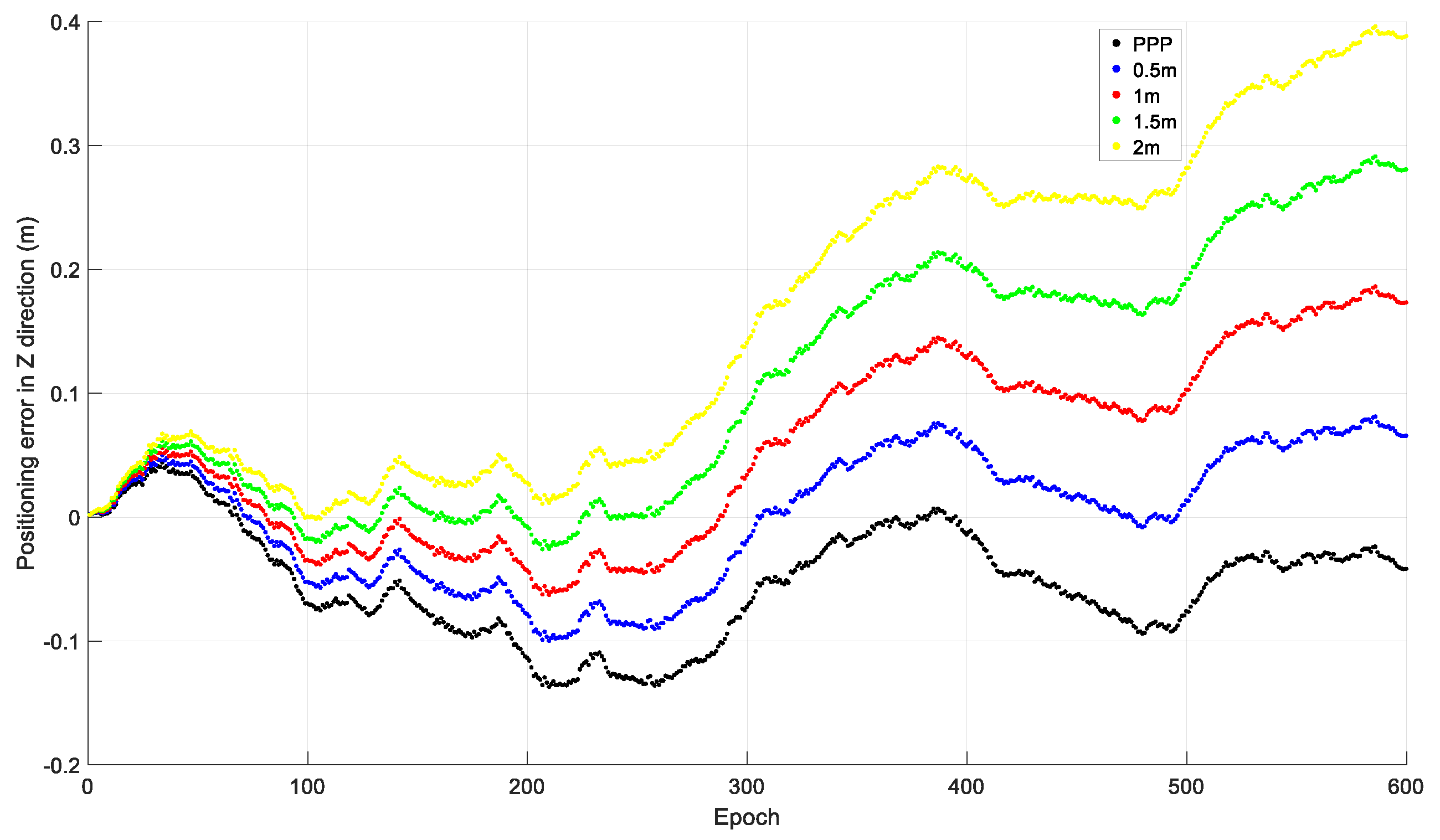
To investigate the effect of the initial coordinate error on time-relative positioning, observations from 20 December 2019 by the Hong Kong CORS station HKLM were downloaded from
ftp://ftp.geodetic.gov.hk and the sampling interval was 1 s. The observations of the four GNSSs were collected, and only GPS observations were used in the investigation. The observations were processed with different initial coordinates: The precise coordinates derived from PPP processing; and the PPP coordinates with 0.5 m, 1.0 m, 1.5 m, and 2.0 m added to X, Y, and Z. The relative positions of the other epochs to that of the first epoch were acquired using the accumulated time-relative method. The positioning errors in the X, Y, and Z directions of the first ten minutes, i.e., 600 epochs, are shown in
Figure 3,
Figure 4 and
Figure 5.
From
Figure 3,
Figure 4 and
Figure 5, we can see that the positioning accuracy can be significantly affected by the initial coordinate error. Generally, the larger the initial coordinate error is, the larger the positioning error is. The positioning error also increases quickly with time.
2.2. Errors in Broadcast Ephemeris
It is well known that the broadcast ephemeris contains errors. They can be divided into orbit error and satellite clock error. These errors vary with time, and they could not be completely removed through the time differencing operation. The remaining errors had an accumulated effect on the time-relative positioning [
5,
20]. From Equation (12), we can see that, rather than the size of orbital and clock errors, it is the change of these errors that will affect the time-relative positioning accuracy, and a fast change will make positioning error accumulate rapidly. To reduce their effects on the performance of the time-relative positioning, we can select those satellites with slow changing orbital and clock errors.
We investigated the change rate of orbital and clock errors of broadcast ephemeris of GPS, Galileo, GLONASS, and BeiDou. The investigation was based on the CLK 91 RTS product [
21,
22] data collected on days 318, 340, 341, 347, and 351–356 in year 2019 (10 days in total and 15 h on average each day). The RTS corrections were processed with the following steps:
Each type of correction of any satellite was divided into different durations and each duration corresponded to the same IODE or IOD;
Denoting the maximum and minimum correction values of each duration as and , the change rate will be , where is the duration length;
We calculated the average value of for different durations of each correction of any satellite.
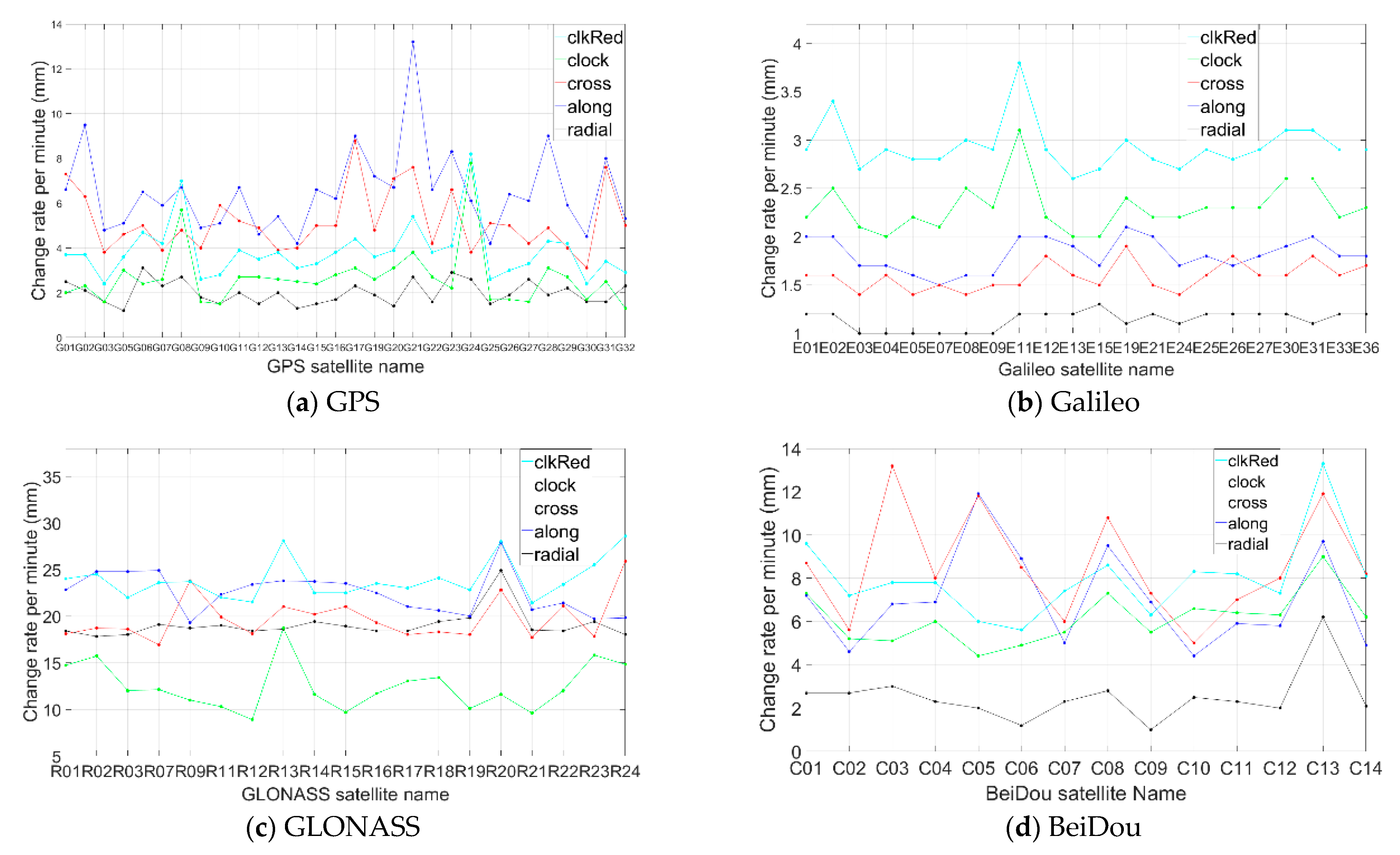
Figure 6 shows the average change per minute of radial, along, cross, and clock corrections, and also shows the clock correction reduced by the radial one, denoted as “clkRed”. Compared to the along and cross corrections, the radial orbit correction and the clock correction have more effect on positioning. The change rate of the radial correction of Galileo is only slightly higher than 1 mm/min, which is the smallest among the four satellite systems. For GPS, the change rate was around 2 mm/min, while for BeiDou, the change rate of the radical correction was slightly higher, at 2 mm/min. For GLONASS, the change rate was much higher, at almost 20 mm/min.
In terms of the clock correction, the change rates of GPS and Galileo were similar, both slightly over 2 mm/min, and it was around 6 mm/min for BeiDou, while it was more than 10 mm/min for GLONASS. In
Figure 6, the “clkRed” curve shows the combined change of radial and clock corrections. The change rate of Galileo was the smallest, at around 3 mm/min; for GPS, it was around 4 mm/min; for BeiDou, it was around 8 mm/min; and for GLONASS, it was more than 20 mm/min.
4. Numerical Results
To test the positioning and navigation performance of the proposed method, two tests were carried out. The first test was based on 24 h of static observations from one Hong Kong CORS station, and the second test was based on practical dynamic observations on the near-shore ocean in Qingdao City.
4.1. Test Results with Static Observations
The 24 h observations the Hong Kong CORS station HKLM collected on 20 December 2019 were processed to assess the accuracy of the proposed time-relative positioning system and to evaluate the time-relative performance for applications over a long period of time simultaneously.
Figure 7 shows the environment of the station. The receiver type is Leica GR50 and the sampling interval of the observations is 1 s. The observations for each hour were processed by simulating practical applications.
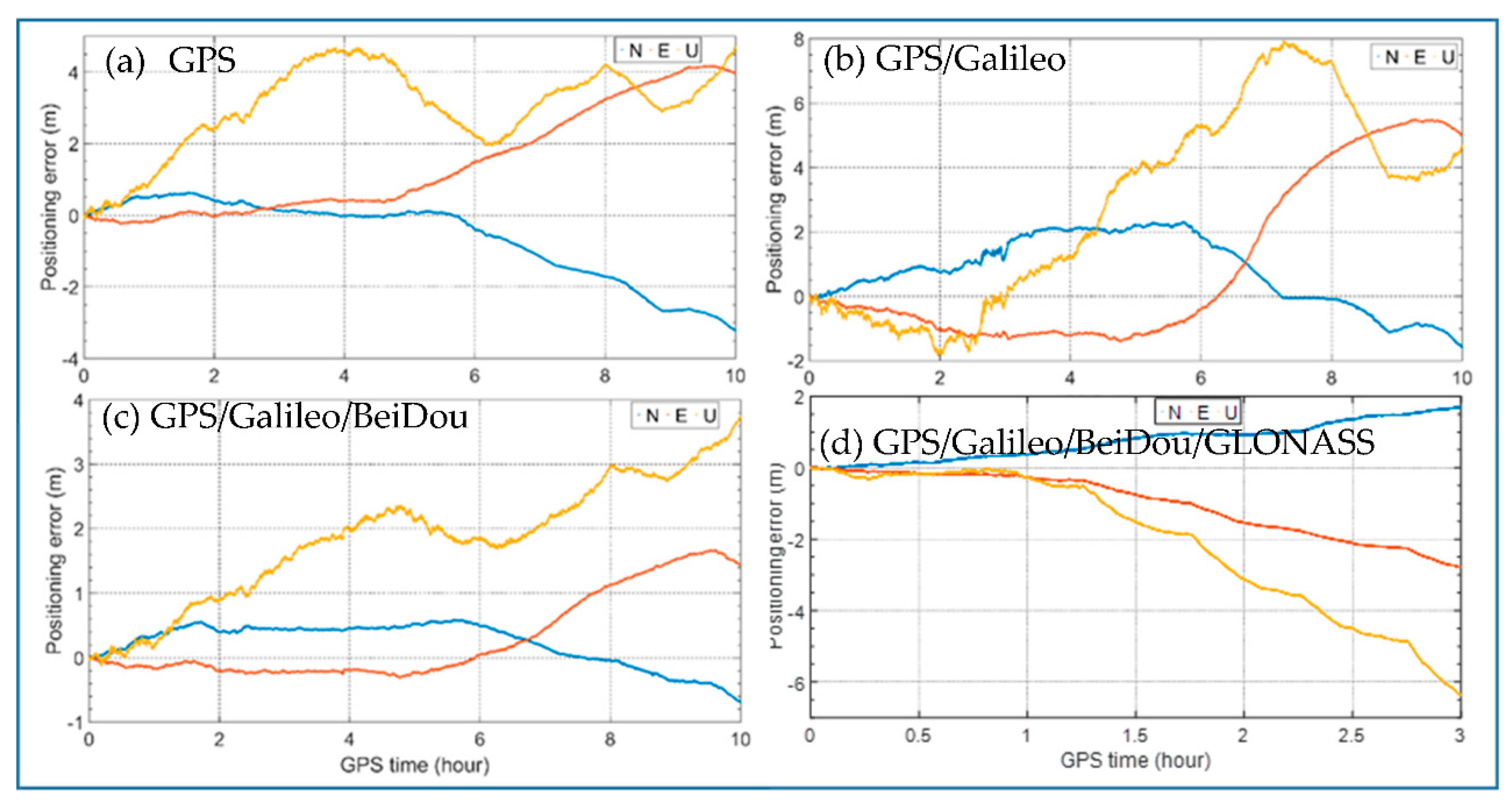
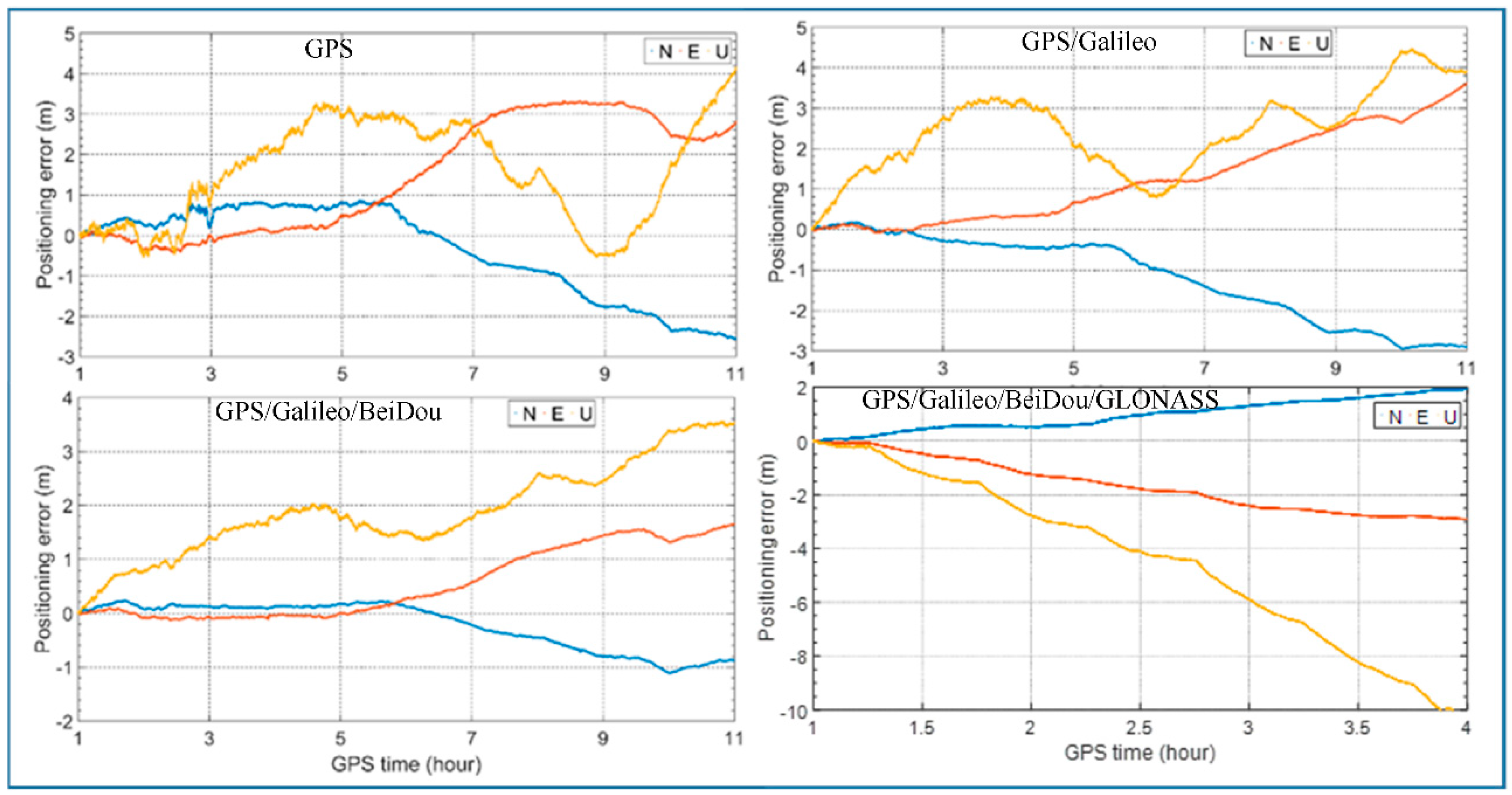
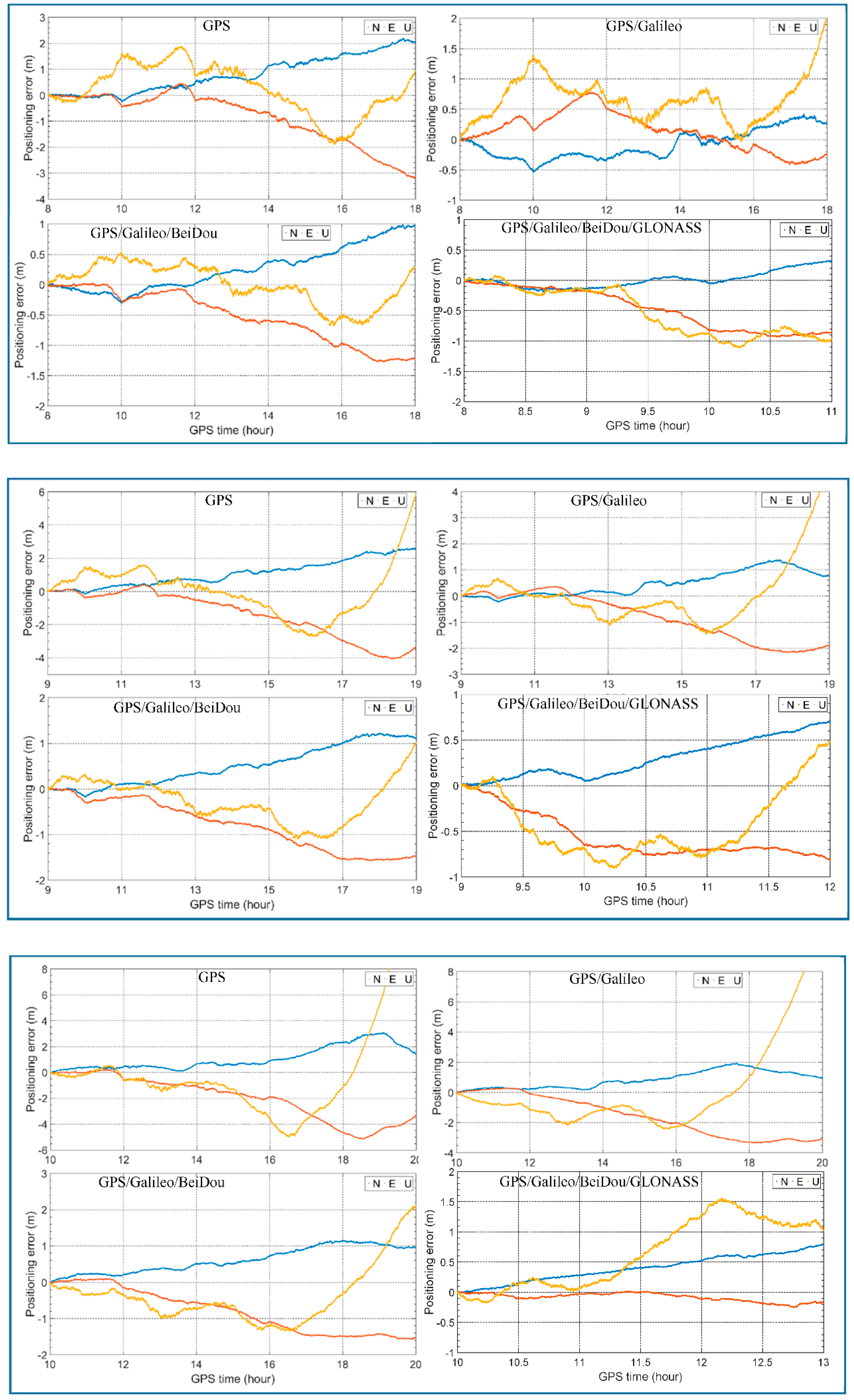
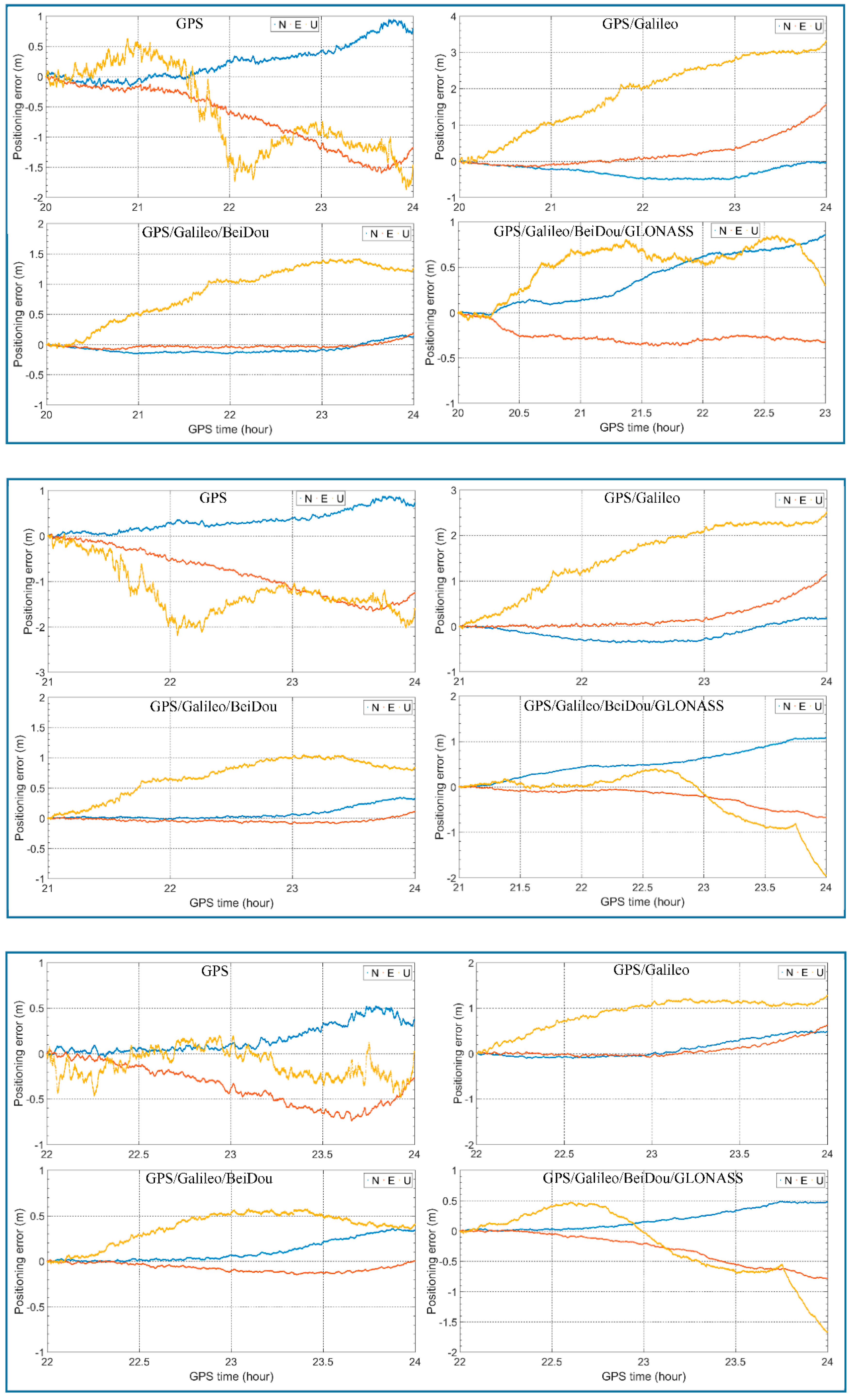
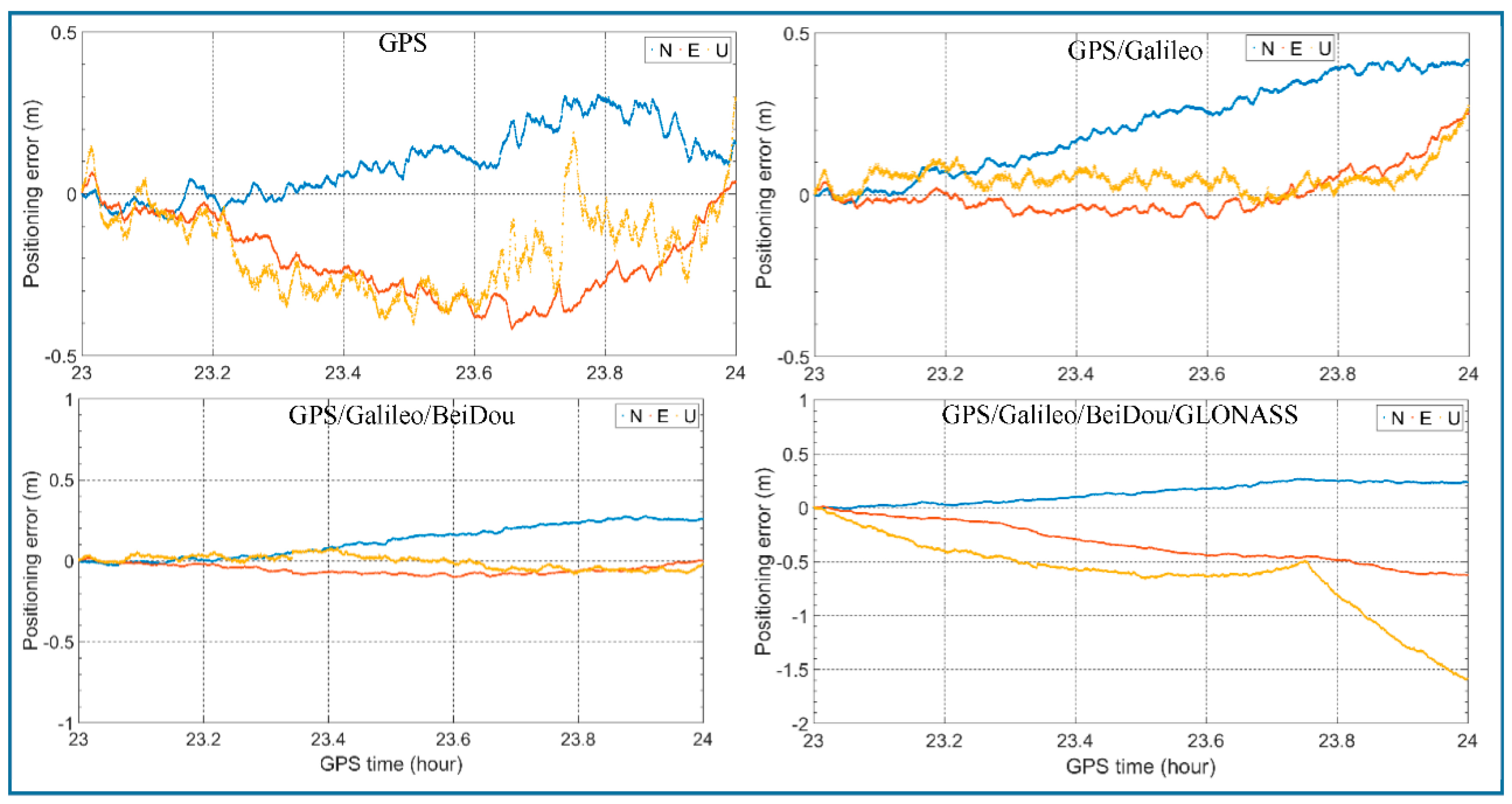
We simulated four scenarios with different combinations of satellite systems: GPS alone, GPS/Galileo, GPS/Galileo/BeiDou and GPS/Galileo/BeiDou/GLONASS. The 24 h time-relative positioning errors of these scenarios are calculated with different starting hours. As an example,
Figure 8 shows the 10-h positioning errors in north, east and up directions of the four scenarios with starting hour 00:00. North is represented by blue, east by red and up by yellow. We can see that the errors in the vertical direction are the largest which can reach several meters for all these four scenarios. The errors in north and east are much smaller especially for GPS/Galileo/BeiDou, which are below 1 m even after 7 h. Among the four scenarios, GPS/Galileo/BeiDou performs best both in horizontal and vertical directions.
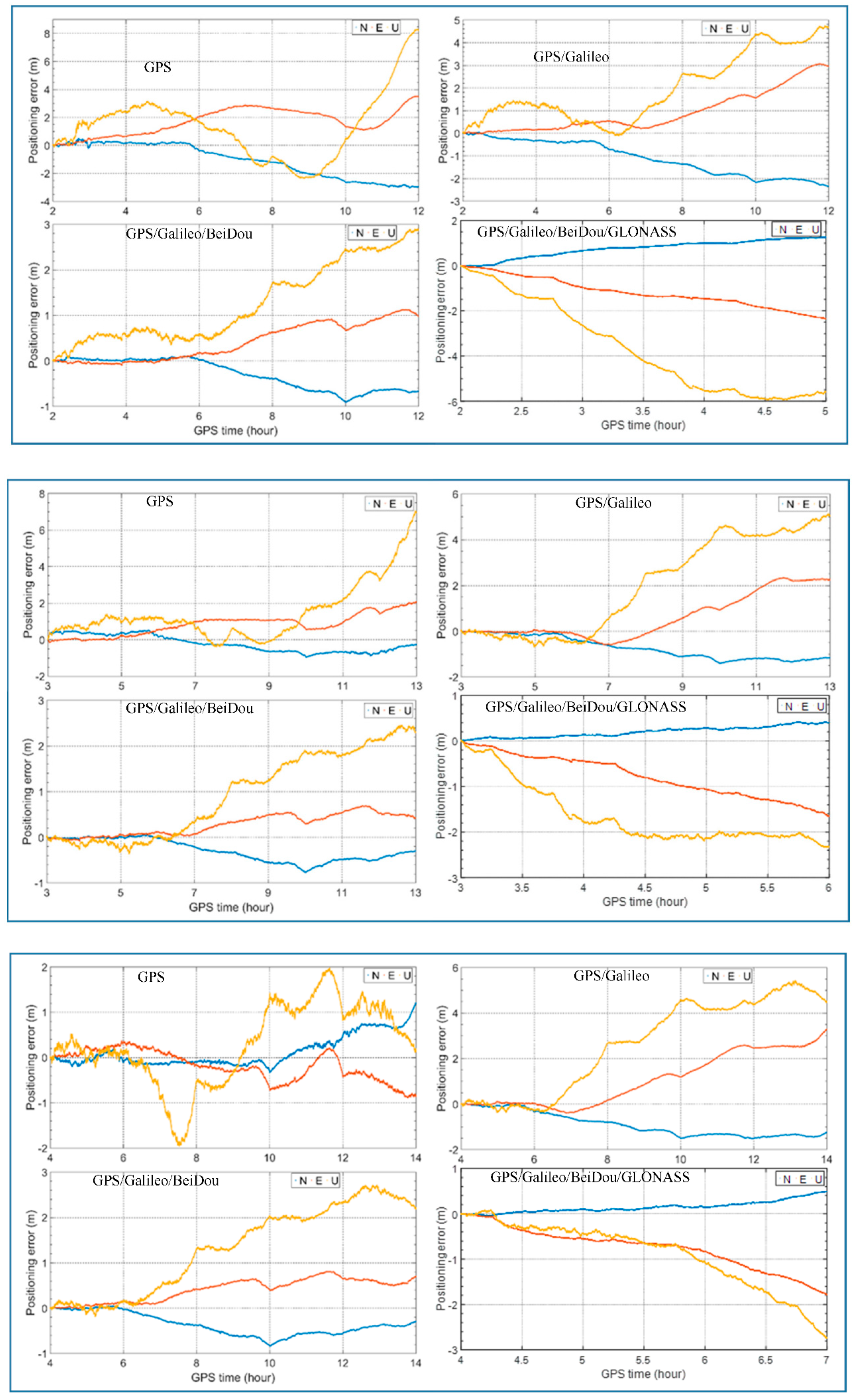
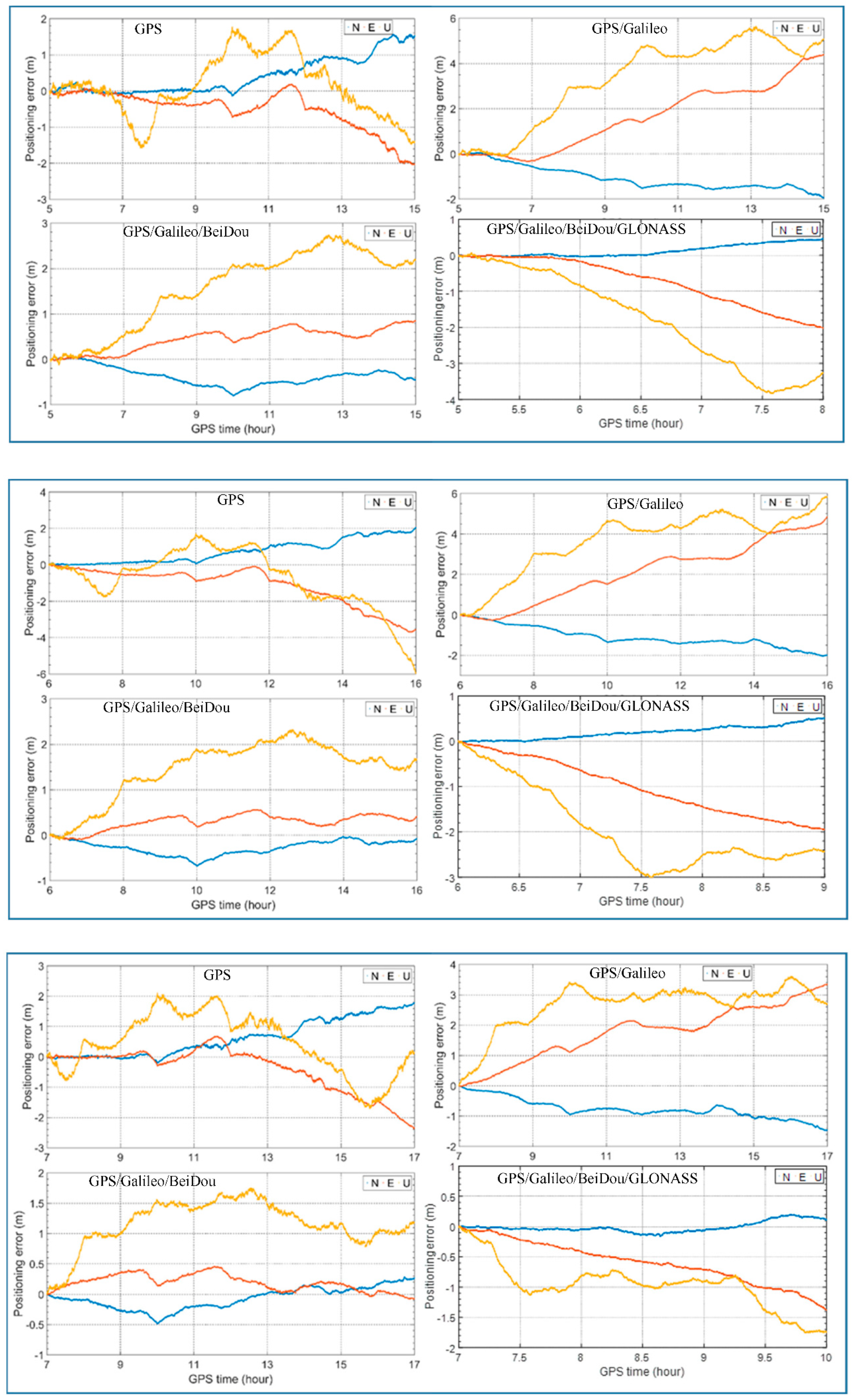
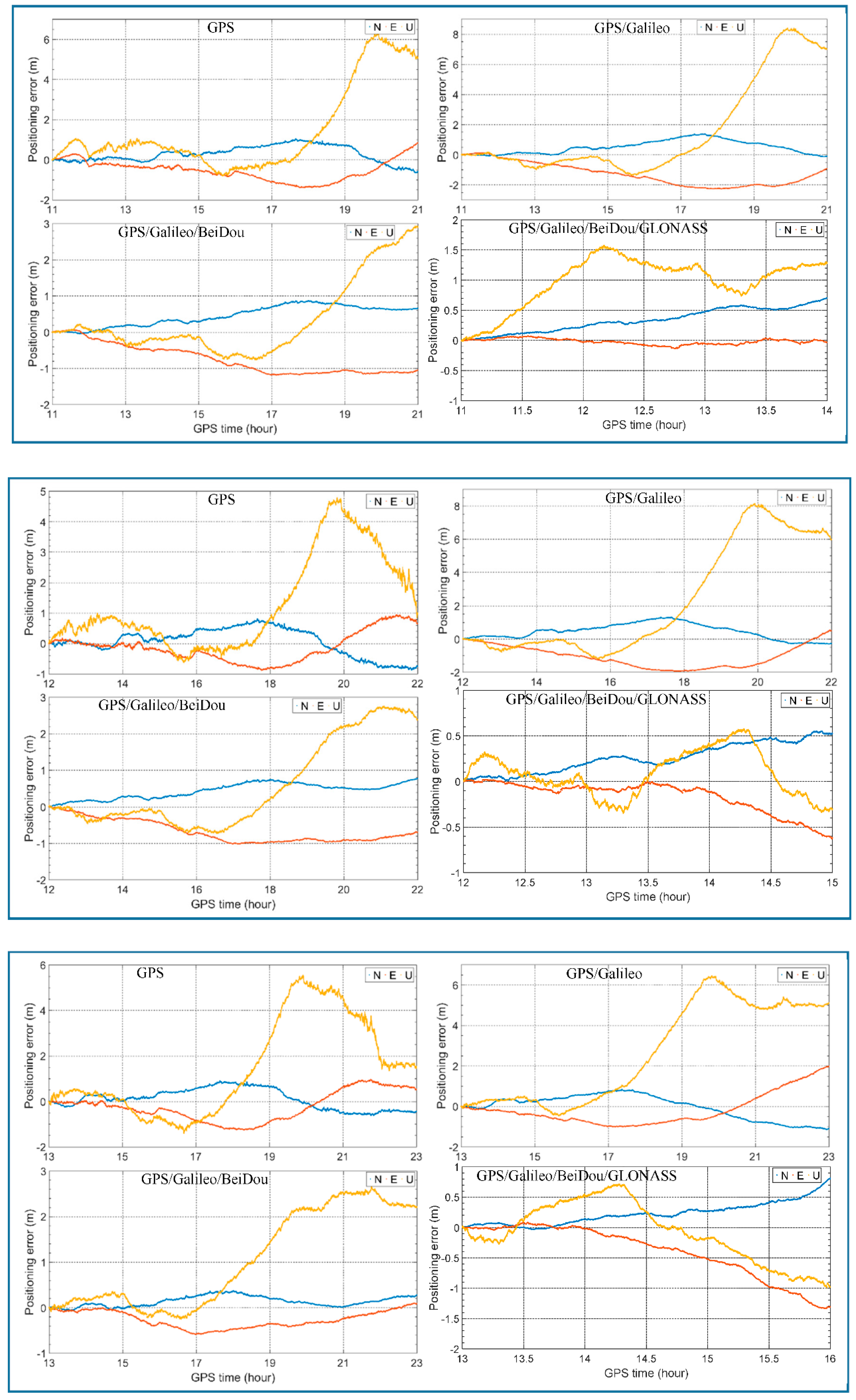
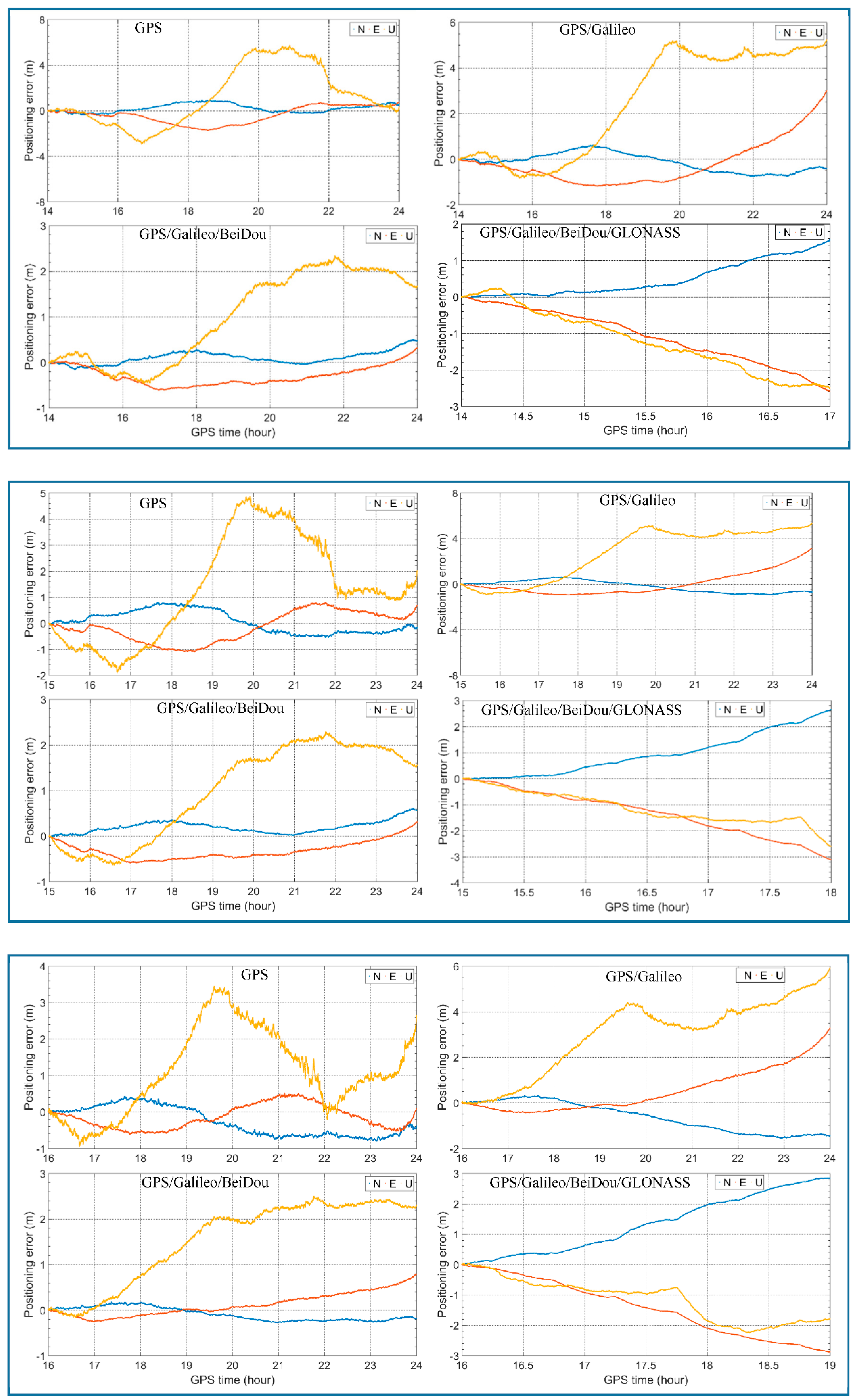
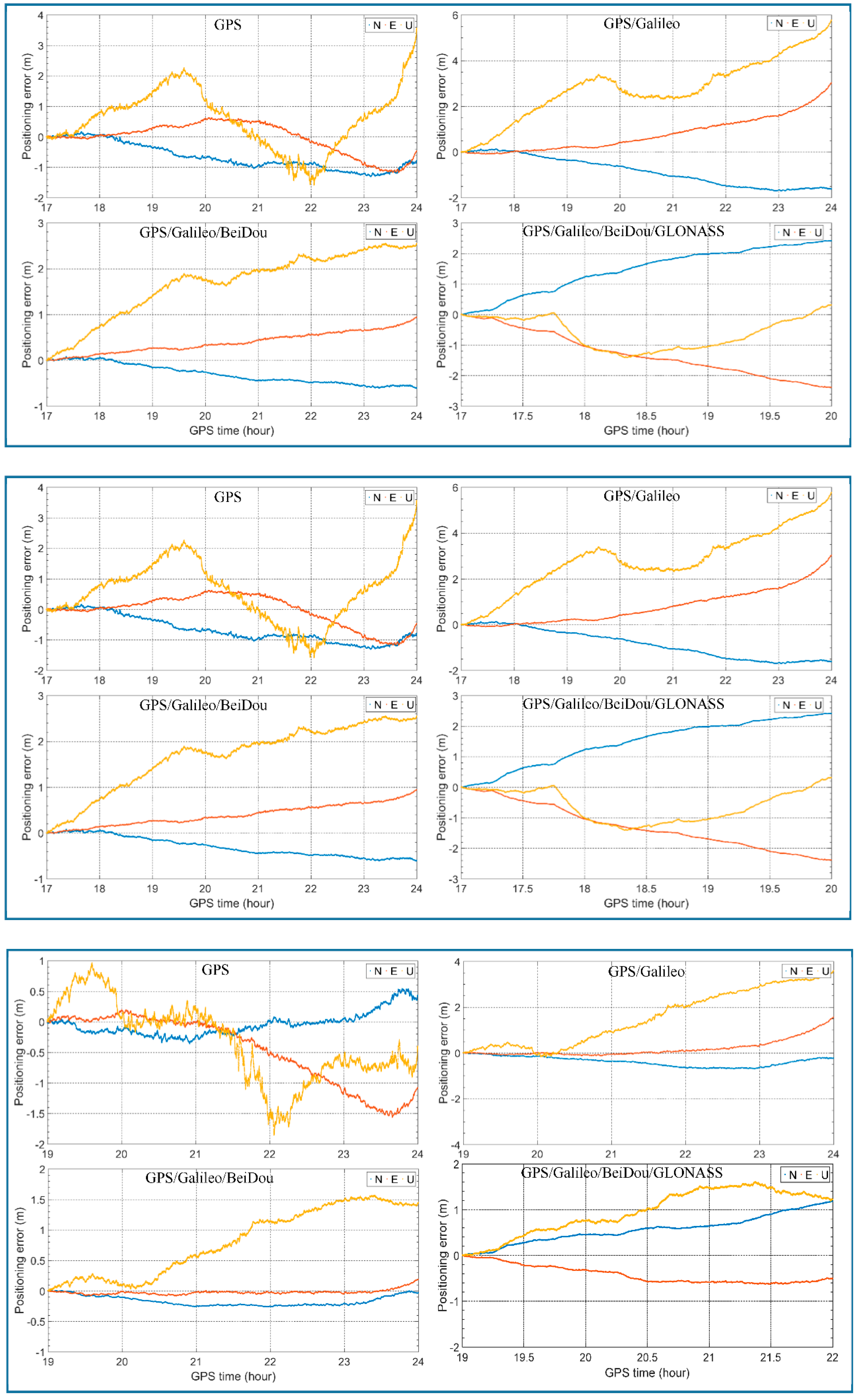
For the positioning errors with the other starting hours, see the
Appendix A.
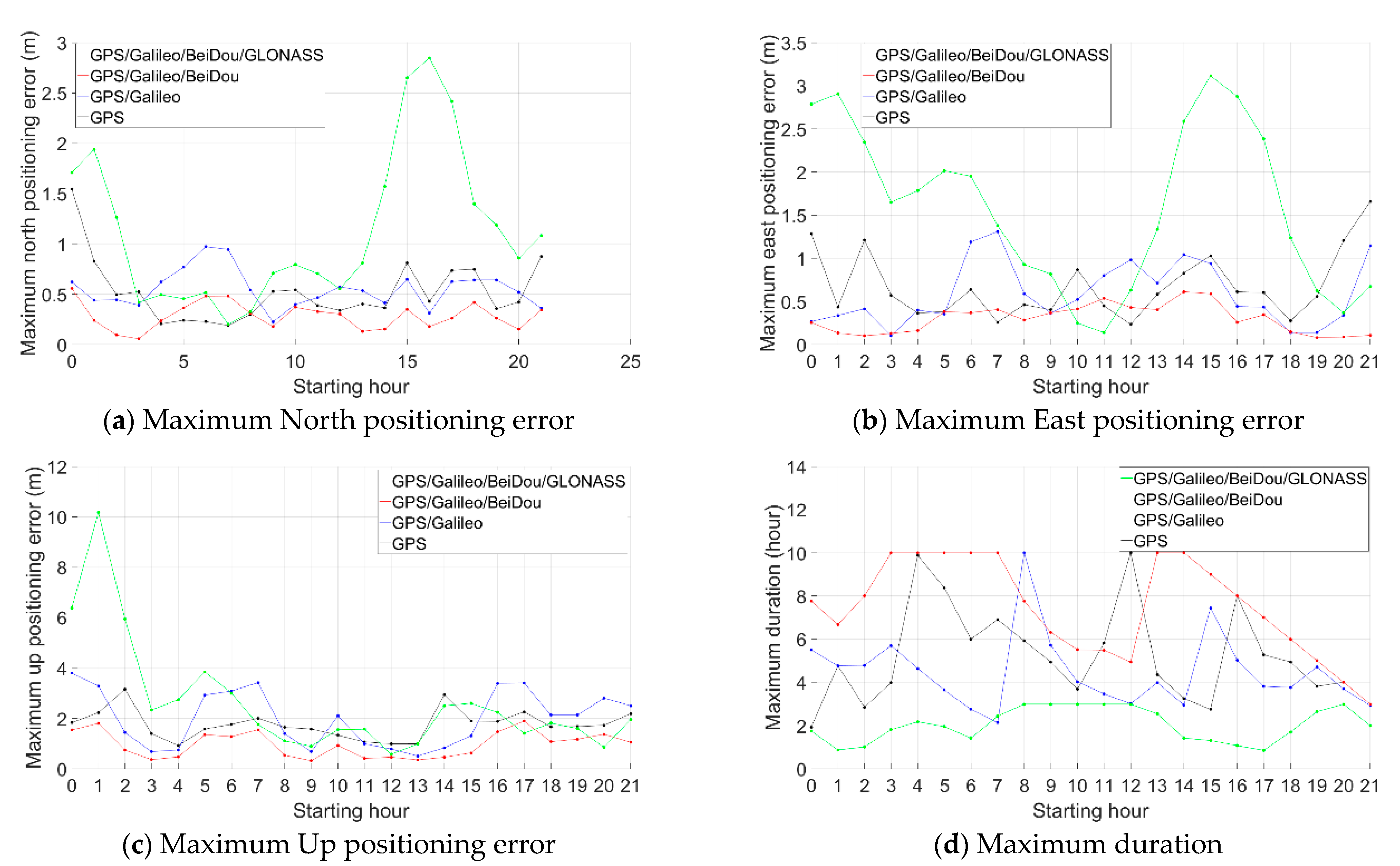
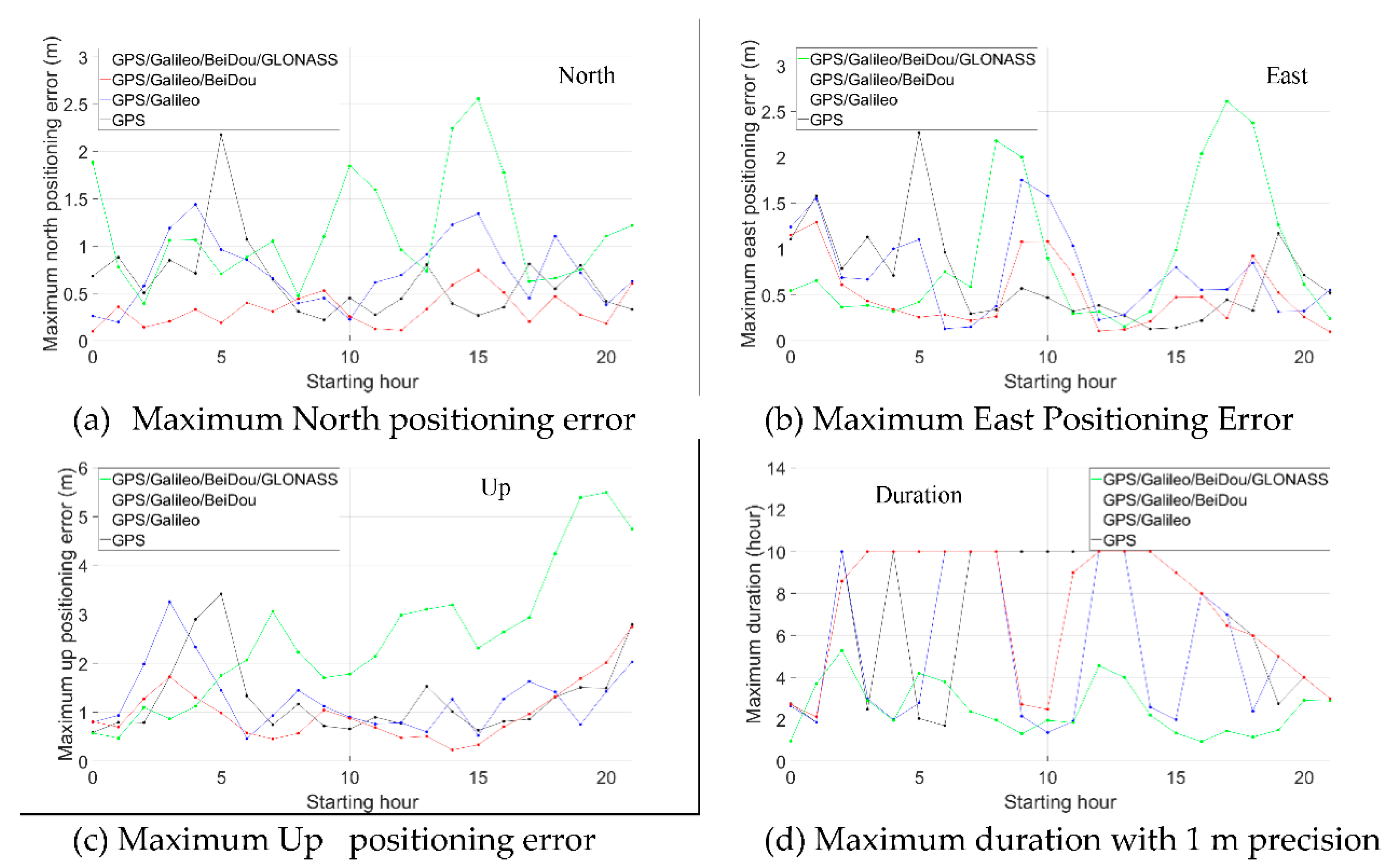
Figure 9 is the statistics of the maximum time-relative positioning error within 3 h (a, b, c) and the maximum duration within 1 m precision in both north and east directions (d).
As shown in
Figure 9, the maximum positioning errors after three hours are mostly less than 0.5 m in horizontal directions when using the proposed method in the scenario of the GPS/Galileo/BeiDou. The best performance was obtained with the GPS/Galileo/BeiDou solution. This is because the performance of the time-relative positioning in terms of accuracy is significantly related to the number satellites used in the solution. The more satellites, the better geometry and the better accuracy obtained.
We can see that for GPS, the positioning performance is not stable, especially in the vertical direction. For example, the positioning error between 02:00–05:00 reached more than 3 m. In the horizontal direction, the positioning errors between 07:00–10:00 and 12:00–15:00 changed slowly and remained within 0.3 m and 0.4 m, while the errors between 00:00–03:00 and 21:00–24:00 reached over 1.5 m. For GPS/Galileo, the positioning performance improved only in the horizontal direction. The reason for this may be that there were only four Galileo satellites observed. For GPS/Galileo/BeiDou, the performance improvement was obvious both in the horizontal and vertical directions. In the horizontal direction, the positioning performance was stable, and positioning errors were all less than 1.0 m, most being less than 0.5 m. In the vertical direction, the positioning errors were generally around 1.0 m. For GPS/Galileo/BeiDou/GLONASS, the performance was generally worse and less stable, especially in the vertical direction, compared to GPS/Galileo/BeiDou. For example, the vertical error between 01:00–04:00 reached almost 10 m and the horizontal errors occasionally reached almost 3 m.
Figure 9d shows the statistics of the longest continuous duration with positioning errors less than 1.0 m both in north and east directions. The GPS/Galileo/BeiDou solution performed best and it lasted generally more than 5 h, occasionally reaching 10 h. The GPS/Galileo/BeiDou/GLONASS solution achieved this low level of error for no more than 3 h.
4.2. Practical Dynamic Test Results
The performance of the relative positioning method was evaluated in Tangdao Bay, Qingdao City, China on 23 September 2019 (
Figure 10). Three GNSS receivers were set up on a boat (
Figure 10, right). In this study, only observations from a Trimble ALLOY GNSS receiver with a choke ring antenna were used. In addition, another Trimble ALLOY receiver was set up on the shore with a distance from the shore of no more than 1 km. The observation collection time was from 04:00 to 08:00 (GPS time) and the sampling interval was 1 s.
To obtain the precise position of the Trimble ALLOY receiver on the boat, first, the static observations of the receiver on the shore were processed with the software Bernese 5.2 and the PPP position was obtained with a mm-level RMS. Then, a short baseline was formed between the receiver on the shore and the Trimble ALLOY receiver on the boat, and the precise relative position was acquired with the software RTKLib 2.4.2. Thus, the precise absolute position of the Trimble ALLOY receiver was derived by combing the PPP position of the receiver on the shore and the relative position between these two receivers, which was used to validate the performance of the proposed method in this research.
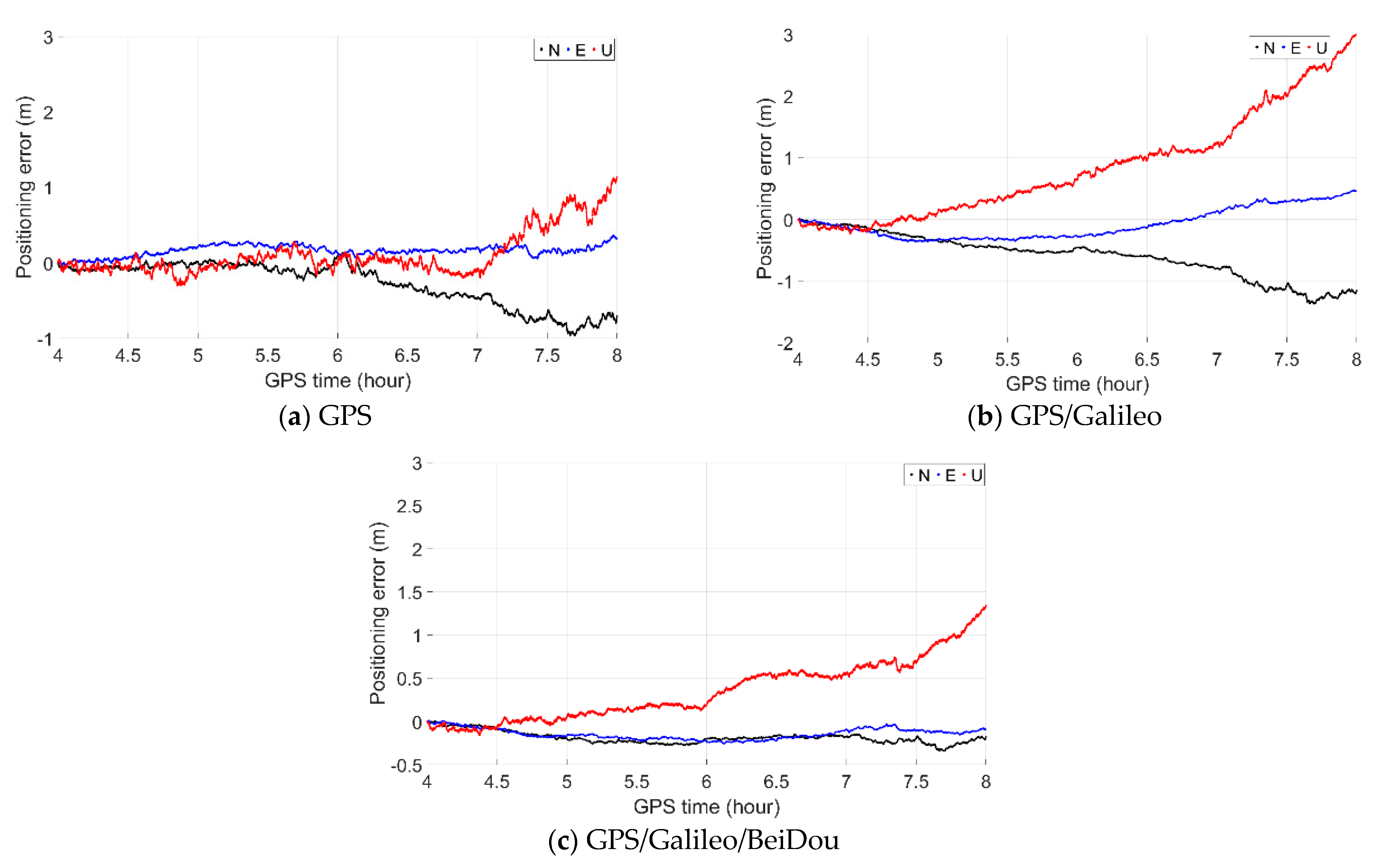
As shown in
Figure 11, the time-relative positioning performance was investigated separately with GPS, GPS/Galileo and GPS/Galileo/BeiDou. Similar to the static test, the positioning performance with GPS/Galileo/BeiDou was the best: All of its errors in the north and east directions were within 0.4 m, even after a duration of as long as 4 h. The vertical errors were no greater than 0.5 m with a duration of 2 h, and generally no greater than 1.0 m with a duration of 4 h.
4.3. Analysis and Discussion
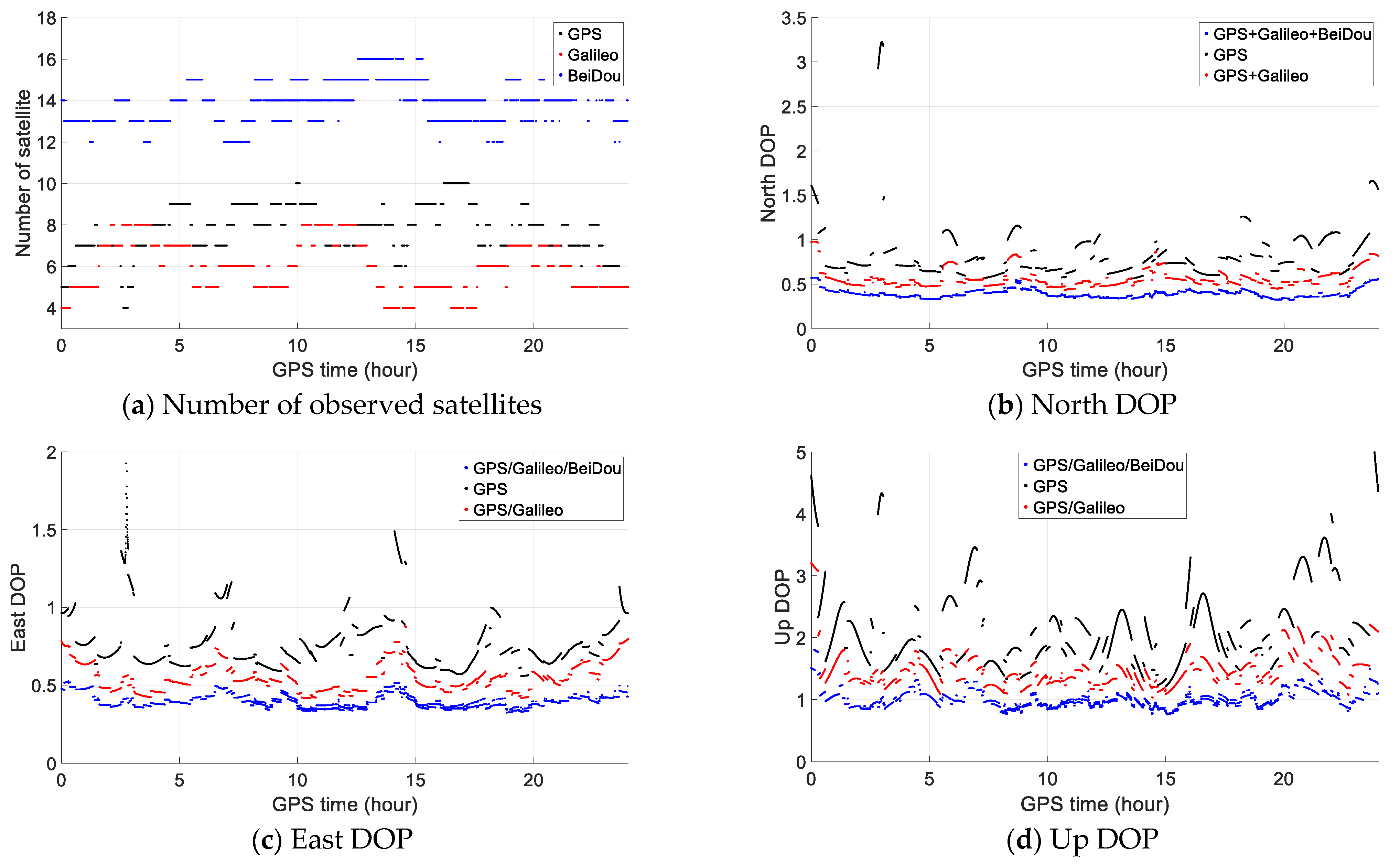
From the numerical test results, we find that GPS/Galileo/BeiDou performs best. To explore the reason, taking the static test as an example, the number of observed satellites of GPS, Galileo and BeiDou above a cutoff elevation angle of 15° is illustrated in
Figure 12 as well as DOP (dilution of precision) in north, east and up directions. We can see that the observed number of GPS satellites is around 7 or 8, it is about 4 for Galileo, while for BeiDou, it is about 14, more than the sum of that of GPS and Galileo. Therefore, the total number of observed satellites of GPS/Galileo/BeiDou is about 25, about double that of GPS/Galileo, which results in good geometry of Dilution of Precision (DOP) especially in east and up directions as shown in
Figure 12. With GPS/Galileo/BeiDou, almost all DOP values are below 0.5 in north and east directions and below 1.0 in up direction.
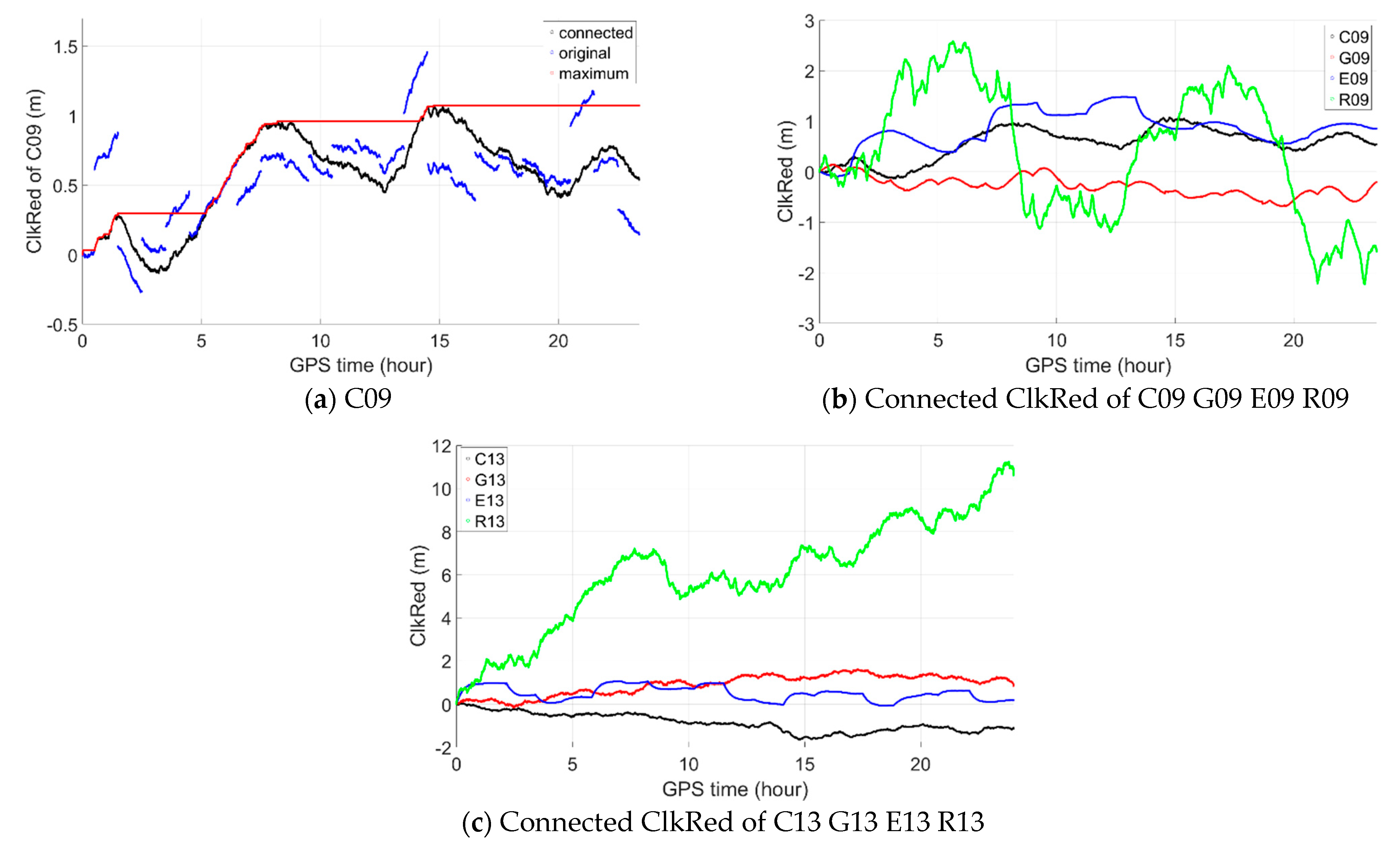
With the second proposed improving measure by preprocessing observations of any two neighboring epochs with the same parameters of broadcast ephemeris, the orbital and clock errors are in fact connected in the improved time-relative method as shown in
Figure 13 (left) by taking BeiDou satellite C09 as an example. The blue one is the original clkRed while the black is the connected.
Figure 13 (right) shows the connected clkRed of satellites C13, G13, E13 and R13 as examples and we can see that the size of clkRed may not increase continuously or linearly with time but running up and down generally. So, except for GLONASS, the clkRed error may not reach 2 m or even 1 m after 24 h as illustrated by the red which gives the maximum clkRed error till current epoch.
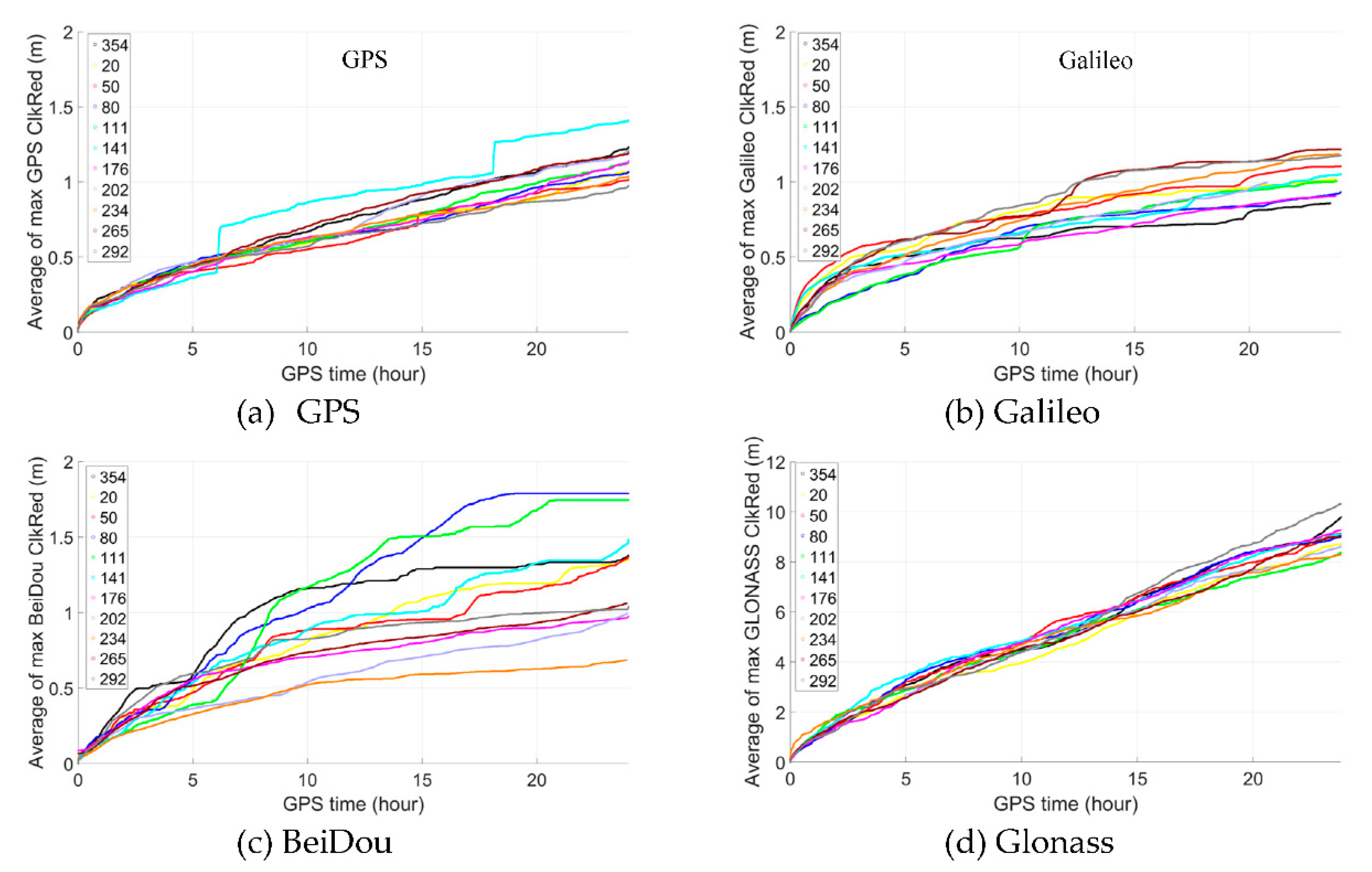
As it is the maximum size of clkRed error that affect the maximum positioning error most with the improved time-relative method and,
Figure 14 shows the average value of the maximum clkRed till current epoch of all GPS, Galileo and BeiDou satellites on different days of year, including 354 of year 2019 (the experimental date of above static test), 20, 50, 90, 111, 141, 176, 202, 234, 265 and 292 of year 2020. We can see that, for GPS, it is very stable generally, the average of the maximum clkRed does not exceed 0.5 m within 5 h and only reach about 1.0 m after 20 h. For Galileo, though not as stable as GPS, it reaches about 0.5 m after 5 h and generally no more than 1.0 m after 15 h. For BeiDou, though the most unstable one, but the average of the maximum clkRed does not exceed 0.5 m generally within 5 h and only reach about 1.0 m after 10 h. Therefore, we can expect the repeatability of similar performance on the other dates. While for GLONASS, the average of the maximum clkRed is much bigger than that of the other three GNSS, which should be the reason that GPS/Galileo/BeiDou/GLONASS has poorer performance.
To demonstrate the repeatability of the performance on the other dates, 24-h GNSS observations of IGS station GOPE (49.9° N, 14.8° E) on 21 September 2020 are downloaded and processed same to that of station HKLM.
Figure 15 shows the maximum positioning errors within 3 h and the maximum duration with 1 m precision in both north and east directions. We can see that the performance is similar to that of HKLM. Also, GPS/Galileo/BeiDou performs best and GPS/Galileo/BeiDou/GLONASS performs worst. And for GPS/Galileo/BeiDou, most of the maximum positioning errors are below 0.5 m in both north & east directions and most of the maximum duration with 1 m precision in both north & east directions exceeds 6 h.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























