A Deep Neural Network-Based Feature Fusion for Bearing Fault Diagnosis


Abstract
:1. Introduction
2. Related Works
2.1. Sensor Fusion
- Signal-level fusion: this type of fusion is considered to be the lowest level where the raw signals from all sensors are combined. Since this type combines raw signals, it is necessary that all signals are comparable in a sense of data amount, sampling rate, registration, and time synchronization [22].
- Feature-level fusion: conduct the fusion at the feature space, i.e., from each signal source (sensor), the corresponding feature set is extracted, then all feature sets are combined to generate a new one.
- Decision-level fusion: this type is considered to be the highest level where all decisions are combined to generate a final conclusion. Based on each signal source (sensor), the health condition of the machine is predicted. Then all predictions are combined to generate the conclusion about the machine health status.
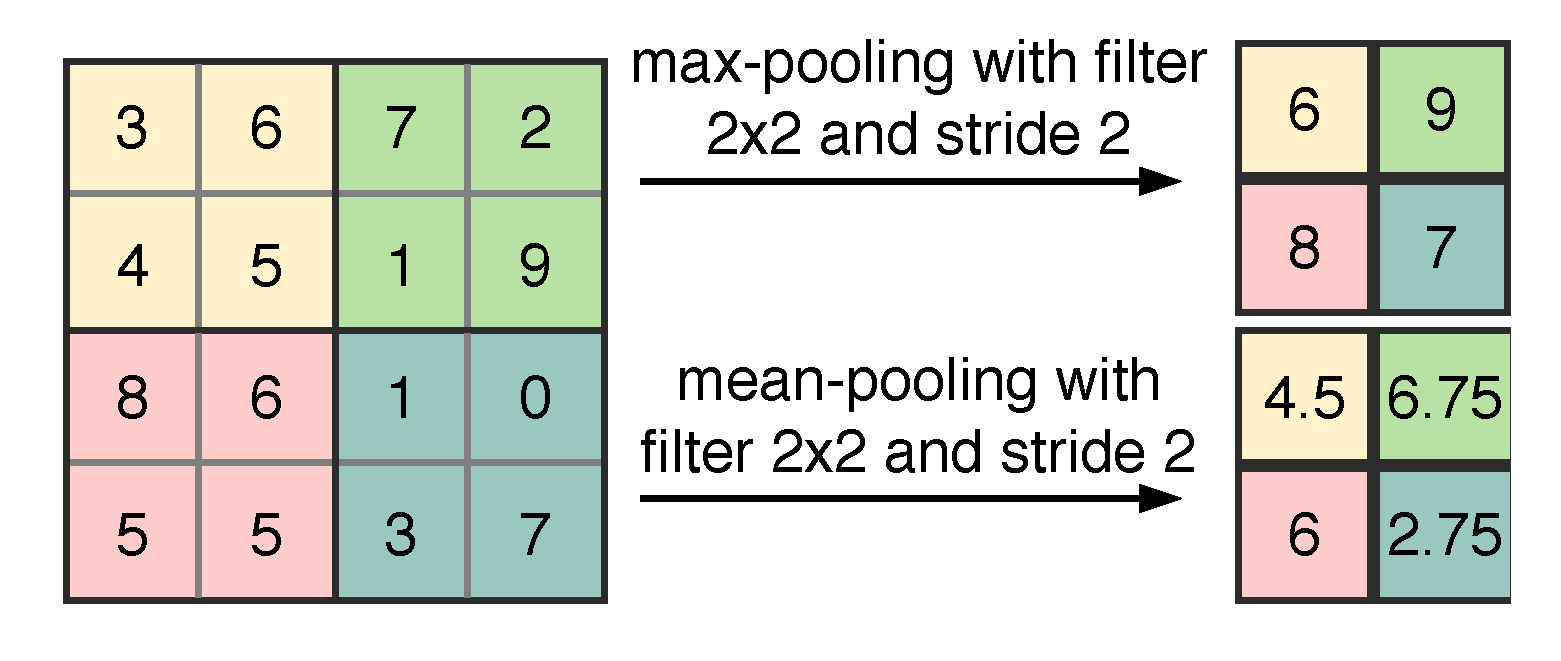
2.2. Convolutional Neural Network
3. Proposed Bearing Fault Diagnosis Method
4. Experiments
4.1. Test-Bed and Data Preparation
4.2. Other Methods for Comparison
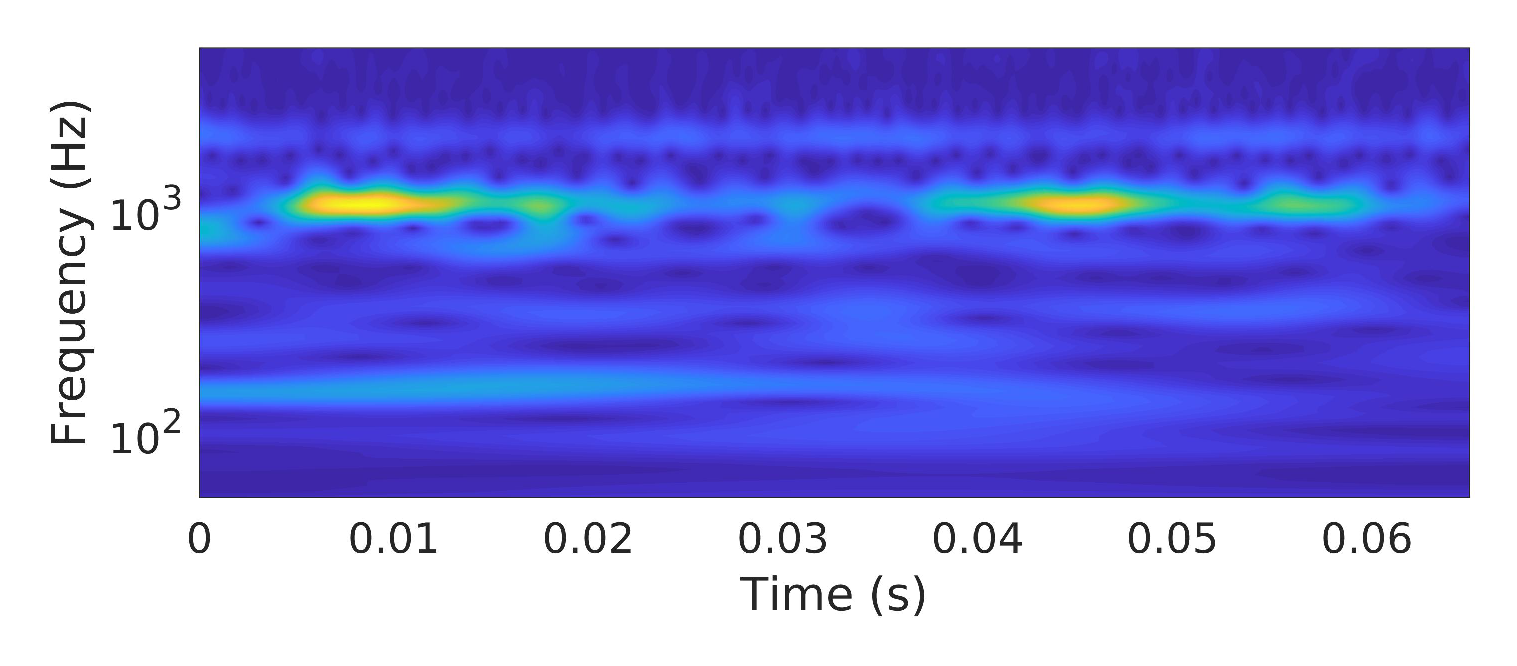
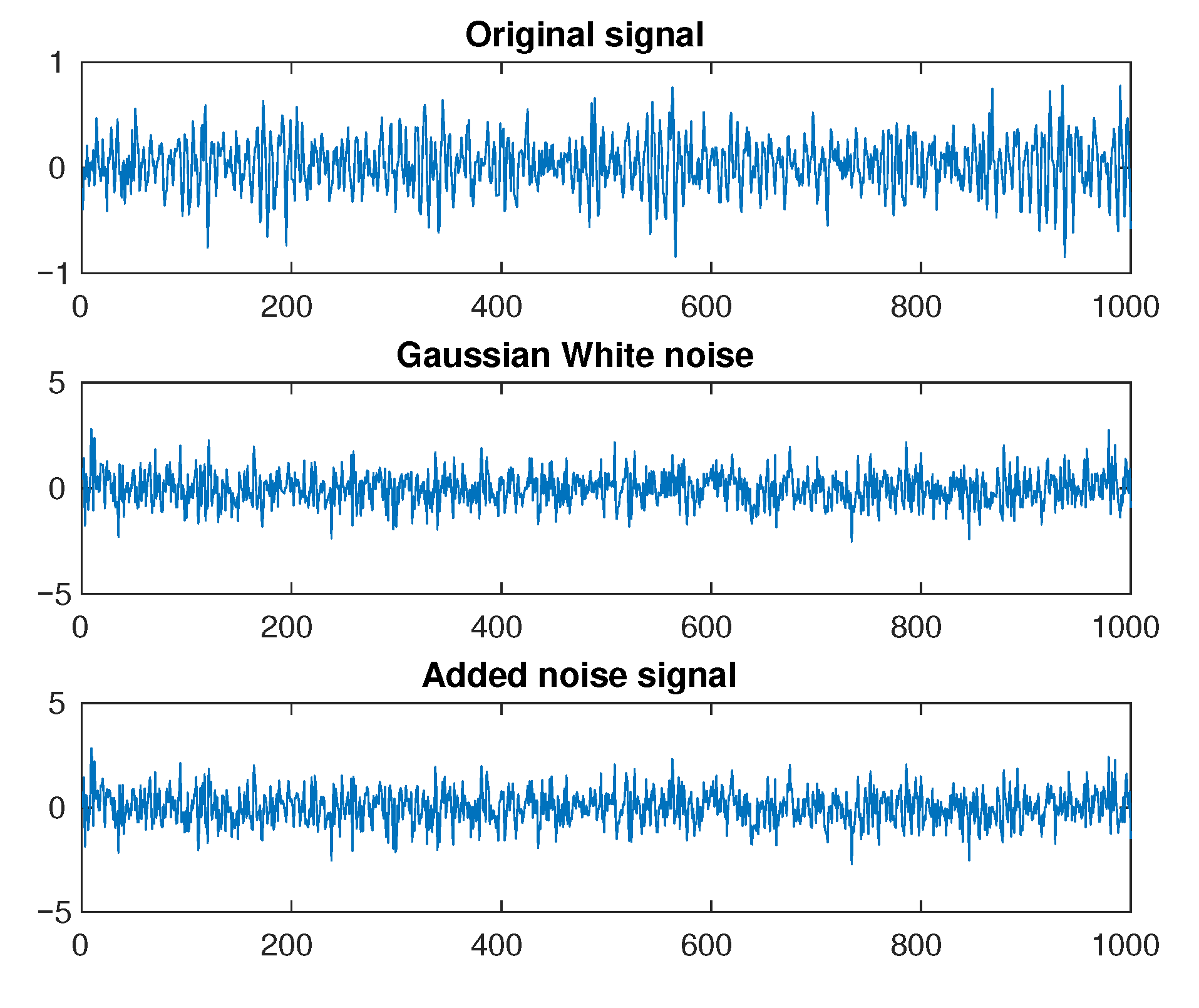
4.3. Signal Pre-Processing
4.4. Designing and Training the Proposed DNN
4.5. Fault Diagnosis Results
4.6. Evaluation under Noisy Conditions
- The diagnosis accuracy of all methods decreases in accordance with the noise level in the signal.
- For the two methods using single signal source, the diagnosis accuracy in the case of DE sensor and FE sensor are very close.
- The PCA-based and DS-based fusion methods have very similar diagnosis accuracy, since in these two methods, the same feature set is extracted.
- Among the compared methods, the proposed method which uses the DNN-based feature fusion has the most consistency against noise, better than all other methods.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ANN | artificial neural network |
| CF | crest factor |
| CNN | convolutional neural network |
| CWT | continuous wavelet transform |
| DNN | deep neural network |
| DL | deep learning |
| FDA | fisher discriminant analysis |
| ICA | independent component analysis |
| IF | impulse factor |
| kNN | k-nearest neighbor |
| KV | kurtosis value |
| MF | margin factor |
| PCA | principal component analysis |
| PPV | peak-to-peak value |
| RMS | root mean square |
| SK | skewness value |
| SNR | signal-to-noise ratio |
| SRA | square root of the amplitude |
| SVM | support vector machine |
References
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Piltan, F.; Prosvirin, A.E.; Jeong, I.; Im, K.; Kim, J.M. Rolling-Element Bearing Fault Diagnosis Using Advanced Machine Learning-Based Observer. Appl. Sci. 2019, 9, 5404. [Google Scholar] [CrossRef] [Green Version]
- Van, M.; Kang, H.J. Two-stage feature selection for bearing fault diagnosis based on dual-tree complex wavelet transform and empirical mode decomposition. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 291–302. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Xu, G.; Hou, D.; Qi, H.; Bo, L. High-speed train wheel set bearing fault diagnosis and prognostics: A new prognostic model based on extendable useful life. Mech. Syst. Signal Process. 2020, 146, 107050. [Google Scholar] [CrossRef]
- Rauber, T.W.; de Assis Boldt, F.; Varejão, F.M. Heterogeneous feature models and feature selection applied to bearing fault diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 637–646. [Google Scholar] [CrossRef]
- Tao, R.; Deng, B.; Wang, Y. Research progress of the fractional Fourier transform in signal processing. Sci. China Ser. F 2006, 49, 1–25. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Carrasco, J. Vibration analysis for large-scale wind turbine blade bearing fault detection with an empirical wavelet thresholding method. Renew. Energy 2020, 146, 99–110. [Google Scholar] [CrossRef]
- Mohanty, S.; Gupta, K.K.; Raju, K.S. Adaptive fault identification of bearing using empirical mode decomposition–principal component analysis-based average kurtosis technique. IET Sci. Meas. Technol. 2017, 11, 30–40. [Google Scholar] [CrossRef]
- Thelaidjia, T.; Moussaoui, A.; Chenikher, S. Bearing fault diagnosis based on independent component analysis and optimized support vector machine. In Proceedings of the 2015 7th International Conference on Modelling, Identification and Control (ICMIC), Sousse, Tunisia, 18–20 December 2015; pp. 1–4. [Google Scholar]
- Van, M.; Kang, H.J. Bearing-fault diagnosis using non-local means algorithm and empirical mode decomposition-based feature extraction and two-stage feature selection. IET Sci. Meas. Technol. 2015, 9, 671–680. [Google Scholar] [CrossRef]
- Zuo, L.; Zhang, L.; Zhang, Z.H.; Luo, X.L.; Liu, Y. A spiking neural network-based approach to bearing fault diagnosis. J. Manuf. Syst. 2020, in press. [Google Scholar]
- Cui, M.; Wang, Y.; Lin, X.; Zhong, M. Fault Diagnosis of Rolling Bearings Based on an Improved Stack Autoencoder and Support Vector Machine. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Gohari, M.; Eydi, A.M. Modelling of shaft unbalance: Modelling a multi discs rotor using K-Nearest Neighbor and Decision Tree Algorithms. Measurement 2020, 151, 107253. [Google Scholar] [CrossRef]
- Zhou, D.X. Universality of deep convolutional neural networks. Appl. Comput. Harmon. Anal. 2020, 48, 787–794. [Google Scholar] [CrossRef] [Green Version]
- Ng, A. Sparse autoencoder. CS294A Lect. Notes 2011, 72, 1–19. [Google Scholar]
- Norouzi, M.; Ranjbar, M.; Mori, G. Stacks of convolutional restricted boltzmann machines for shift-invariant feature learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2009, Miami, FL, USA, 20–25 June 2009; pp. 2735–2742. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Wang, H.; Li, S.; Song, L.; Cui, L.; Wang, P. An enhanced intelligent diagnosis method based on multi-sensor image fusion via improved deep learning network. IEEE Trans. Instrum. Meas. 2019, 69, 2648–2657. [Google Scholar] [CrossRef]
- Chen, Z.; Li, W. Multisensor feature fusion for bearing fault diagnosis using sparse autoencoder and deep belief network. IEEE Trans. Instrum. Meas. 2017, 66, 1693–1702. [Google Scholar] [CrossRef]
- Kaur, R.; Kaur, S. An approach for image fusion using PCA and genetic algorithm. Int. J. Comput. Appl. 2016, 145, 54–59. [Google Scholar] [CrossRef]
- Lohweg, V.; Mönks, U. Fuzzy-Pattern-Classifier Based Sensor Fusion for Machine Conditioning. Available online: https://www.intechopen.com/books/sensor-fusion-and-its-applications/fuzzy-pattern-classifier-based-sensor-fusion-for-machine-conditioning (accessed on 7 November 2020).
- Hui, K.H.; Lim, M.H.; Leong, M.S.; Al-Obaidi, S.M. Dempster-Shafer evidence theory for multi-bearing faults diagnosis. Eng. Appl. Artif. Intell. 2017, 57, 160–170. [Google Scholar] [CrossRef]
- Xie, X.; Ke, Y.; Hao, Y.; Song, L.; Wang, H. Feature extraction method for roller bearing based on Dempster-Shafer evidence. In Proceedings of the 2017 9th International Conference on Modelling, Identification and Control (ICMIC), Kunming, China, 10–12 July 2017; pp. 746–751. [Google Scholar]
- Loparo, K.A. Bearing Data Center; Case Western Reserve University: Cleveland, OH, USA, 2013. [Google Scholar]
- Haghighat, M.; Abdel-Mottaleb, M.; Alhalabi, W. Discriminant correlation analysis: Real-time feature level fusion for multimodal biometric recognition. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1984–1996. [Google Scholar] [CrossRef] [Green Version]
- Phung, S.L.; Bouzerdoum, A. Matlab Library for Convolutional Neural Networks; Tech. Rep.; ICT Research Institute, Visual and Audio Signal Processing Laboratory, University of Wollongong: Dubai, UAE, 2009. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Bolós, V.J.; Benítez, R. The wavelet scalogram in the study of time series. In Advances in Differential Equations and Applications; Springer: Berlin/Heidelberg, Germany, 2014; pp. 147–154. [Google Scholar]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Wang, J.; Mo, Z.; Zhang, H.; Miao, Q. A Deep Learning Method for Bearing Fault Diagnosis Based on Time-frequency Image. IEEE Access 2019, 7, 42373–42383. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 60, 1097–1105. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Conditions | Fault Size (Mils) | Label |
|---|---|---|
| No fault | 0 | |
| Inner race fault | 7 | 1 |
| Inner race fault | 14 | 2 |
| Inner race fault | 21 | 3 |
| Ball fault | 7 | 4 |
| Ball fault | 14 | 5 |
| Ball fault | 21 | 6 |
| Outer race fault | 7 | 7 |
| Outer race fault | 14 | 8 |
| Outer race fault | 21 | 9 |
| Method | Sensor | Accuracy (%) | |||
|---|---|---|---|---|---|
| 0 hp | 1 hp | 2 hp | 3 hp | ||
| Alexnet | DE | 100.0 | 99.78 | 100.0 | 100.0 |
| Alexnet | FE | 100.0 | 99.78 | 99.89 | 100.0 |
| Lenet5 | DE | 97.56 | 96.67 | 99.56 | 99.67 |
| Lenet5 | FE | 97.56 | 96.67 | 99.56 | 99.67 |
| PCA-based fusion | DE and FE | 98.6 | 98.6 | 99.25 | 99.4 |
| DS-based fusion | DE and FE | 97.73 | 97.67 | 99.05 | 99.47 |
| Proposed method | DE and FE | 100.0 | 99.56 | 100.0 | 99.78 |
| Noise Level (dB) | −8 | −7 | −6 | −5 | −4 | −3 | −2 | −1 | Load 0 hp |
| Alexnet-DE | 55.11 | 67.0 | 75.44 | 84.11 | 87.33 | 90.67 | 91.22 | 94.56 | |
| Alexnet-FE | 57.89 | 68.0 | 71.44 | 82.44 | 82.56 | 88.89 | 92.11 | 93.44 | |
| Lenet5-DE | 35.89 | 34.22 | 45.44 | 61.78 | 58.11 | 68.44 | 82.67 | 86.22 | |
| Lenet5-FE | 39.78 | 45.56 | 60.89 | 59.78 | 72.44 | 79.78 | 86.89 | 89.11 | |
| PCA-based fusion | 53.88 | 62.33 | 67.14 | 72.27 | 76.68 | 80.1 | 82.68 | 86.37 | |
| DS-based fusion | 54.42 | 62.13 | 66.06 | 72.4 | 76.14 | 80.5 | 83.69 | 86.24 | |
| Proposed method | 65.11 | 78.11 | 82.78 | 85.33 | 90.0 | 92.22 | 94.44 | 96.22 | |
| Alexnet-DE | 53.89 | 64.44 | 77.89 | 83.78 | 89.0 | 91.56 | 93.67 | 95.22 | Load 1 hp |
| Alexnet-FE | 52.11 | 56.56 | 65.78 | 71.67 | 78.0 | 80.78 | 87.78 | 90.22 | |
| Lenet5-DE | 34.56 | 39.22 | 45.22 | 56.22 | 63.22 | 74.0 | 78.0 | 81.67 | |
| Lenet5-FE | 37.67 | 43.0 | 56.22 | 59.56 | 71.56 | 81.44 | 81.89 | 87.78 | |
| PCA-based fusion | 54.66 | 59.2 | 65.98 | 71.57 | 77.36 | 82.46 | 85.93 | 88.59 | |
| DS-based fusion | 54.66 | 59.2 | 65.98 | 71.57 | 77.36 | 82.46 | 85.93 | 88.59 | |
| Proposed method | 53.22 | 73.44 | 83.33 | 90.0 | 91.89 | 93.11 | 96.44 | 97.44 | |
| Alexnet-DE | 52.56 | 64.33 | 73.89 | 83.33 | 87.11 | 90.33 | 94.56 | 96.0 | Load 2 hp |
| Alexnet-FE | 52.89 | 58.78 | 70.11 | 79.78 | 84.11 | 90.56 | 95.33 | 96.67 | |
| Lenet5-DE | 38.78 | 42 | 51.11 | 63 | 68.89 | 79.22 | 81.56 | 85.67 | |
| Lenet5-FE | 39.22 | 45 | 57.57 | 65.67 | 72.67 | 78.44 | 86 | 92.33 | |
| PCA-based fusion | 55.12 | 58.85 | 67.14 | 71.73 | 76.36 | 81.21 | 87.27 | 88.94 | |
| DS-based fusion | 55.39 | 60.83 | 66.4 | 71.8 | 76.9 | 82.09 | 87.48 | 90.21 | |
| Proposed method | 75.11 | 78.67 | 89.78 | 93.11 | 96.33 | 97.56 | 98.78 | 99.11 | |
| Alexnet-DE | 58.33 | 63.67 | 79.0 | 83.78 | 91.78 | 94.56 | 96.56 | 98.0 | Load 3 hp |
| Alexnet-FE | 64.56 | 71.11 | 81.56 | 85.56 | 91.11 | 95.56 | 95.89 | 97.44 | |
| Lenet5-DE | 40.56 | 41.33 | 55.67 | 58.78 | 78.89 | 82.67 | 88.56 | 92.67 | |
| Lenet5-FE | 41.22 | 58.11 | 64.0 | 73.33 | 77.22 | 87.11 | 89.22 | 94.33 | |
| PCA-based fusion | 57.25 | 63.35 | 73.39 | 78.39 | 84.57 | 88.83 | 90.66 | 94.36 | |
| DS-based fusion | 57.98 | 64.42 | 72.72 | 78.18 | 85.79 | 88.9 | 91.52 | 94.83 | |
| Proposed method | 79.89 | 83.89 | 92.67 | 96.0 | 96.78 | 97.67 | 98.44 | 98.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoang, D.T.; Tran, X.T.; Van, M.; Kang, H.J. A Deep Neural Network-Based Feature Fusion for Bearing Fault Diagnosis. Sensors 2021, 21, 244. https://doi.org/10.3390/s21010244
Hoang DT, Tran XT, Van M, Kang HJ. A Deep Neural Network-Based Feature Fusion for Bearing Fault Diagnosis. Sensors. 2021; 21(1):244. https://doi.org/10.3390/s21010244
Chicago/Turabian StyleHoang, Duy Tang, Xuan Toa Tran, Mien Van, and Hee Jun Kang. 2021. "A Deep Neural Network-Based Feature Fusion for Bearing Fault Diagnosis" Sensors 21, no. 1: 244. https://doi.org/10.3390/s21010244