Fabrication and Characteristics of a Three-Axis Accelerometer with Double L-Shaped Beams

Abstract
:1. Introduction
2. Basic Structure and Working Principle
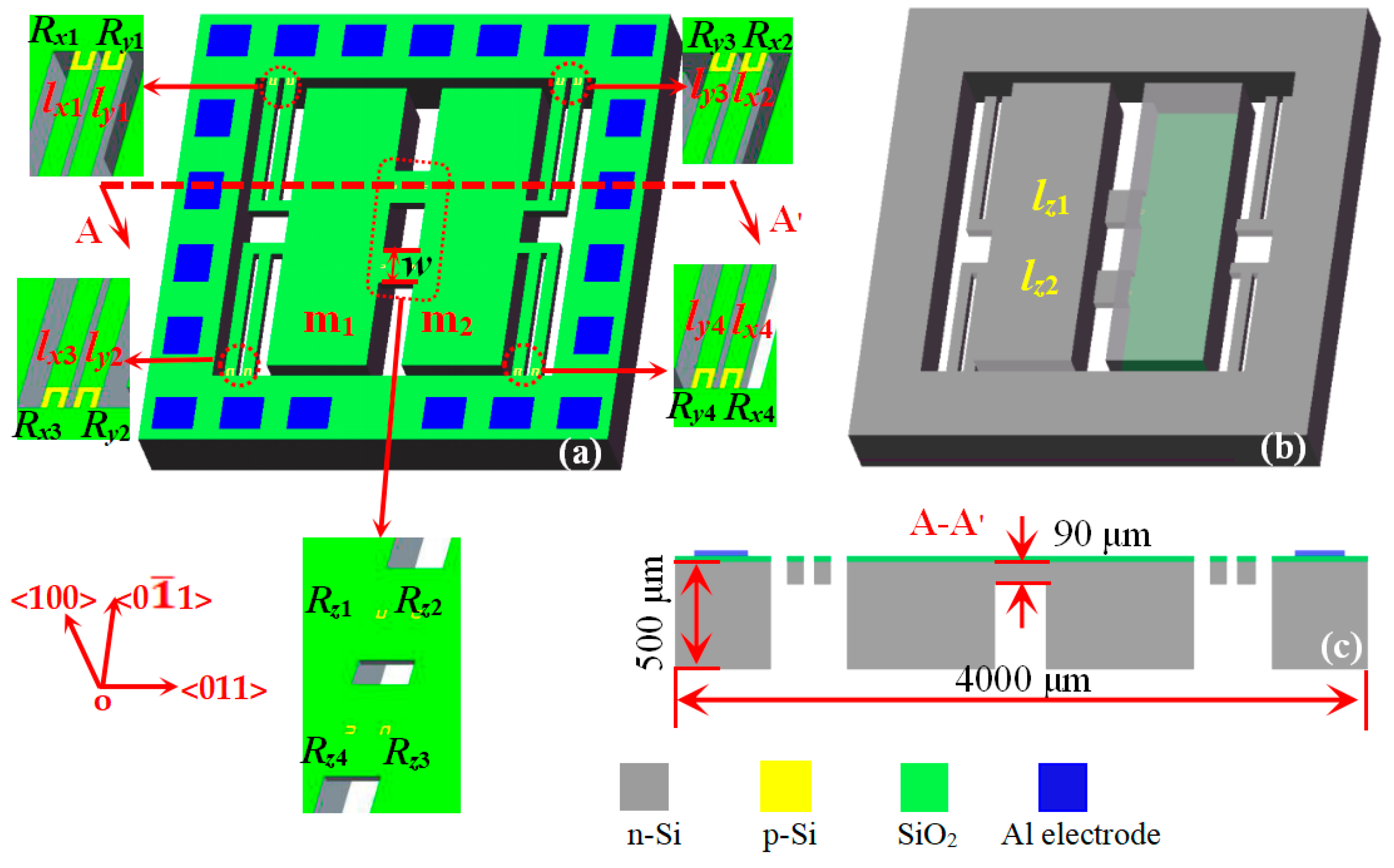
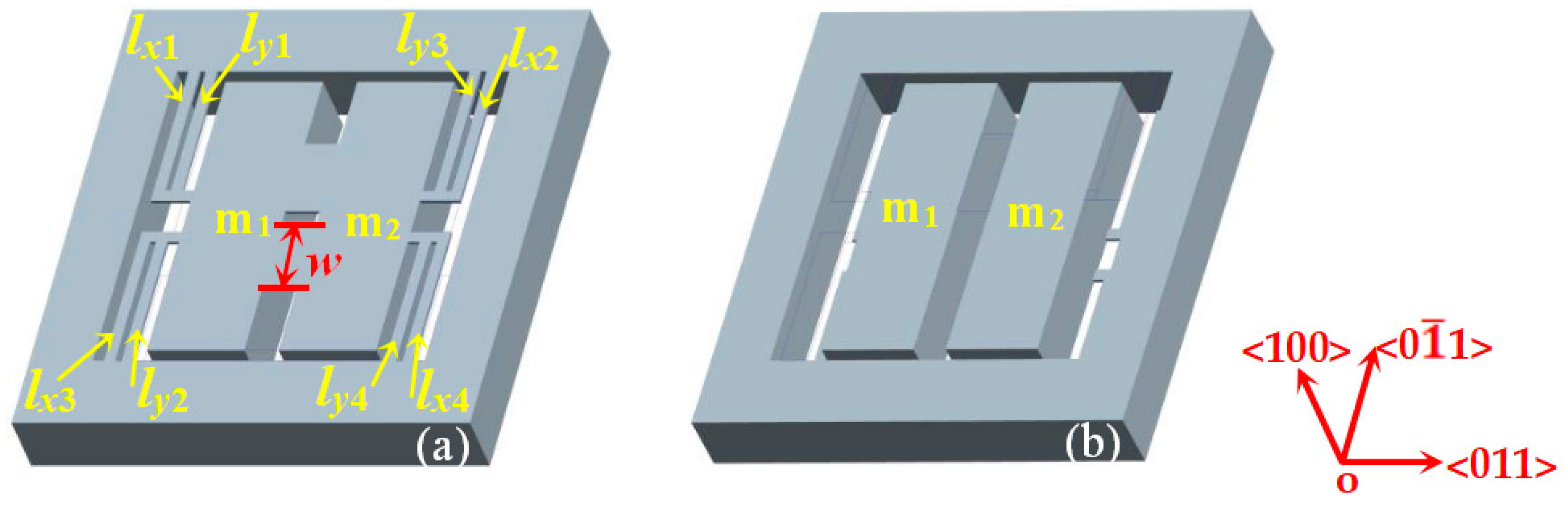
2.1. Basic Structure
2.2. Sensitivity Analysis
3. Simulation and Fabrication Technology
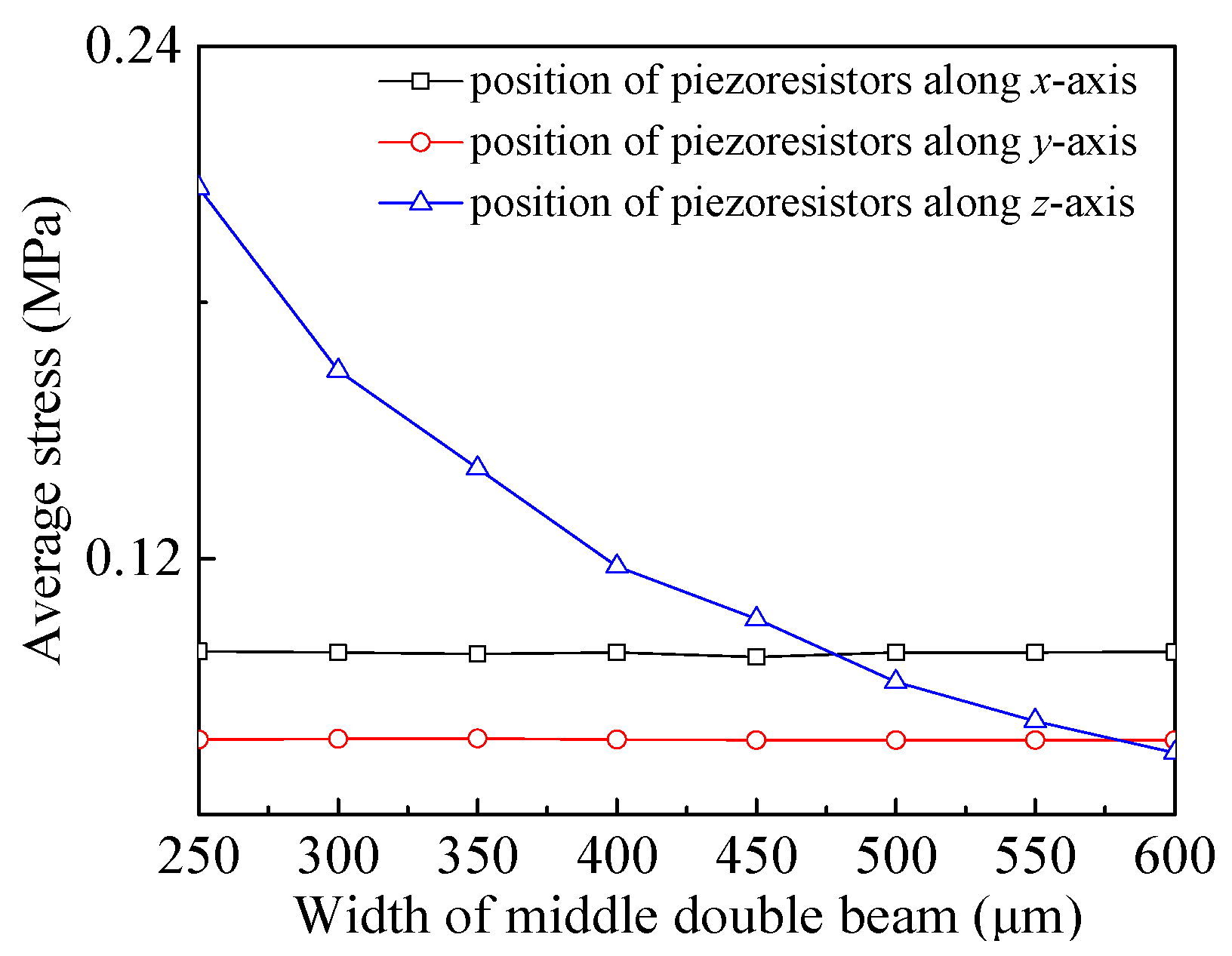
3.1. Simulation of Three-axis Accelerometer
3.2. The Fabrication Process of Three-axis Accelerometer
4. Results and Discussion
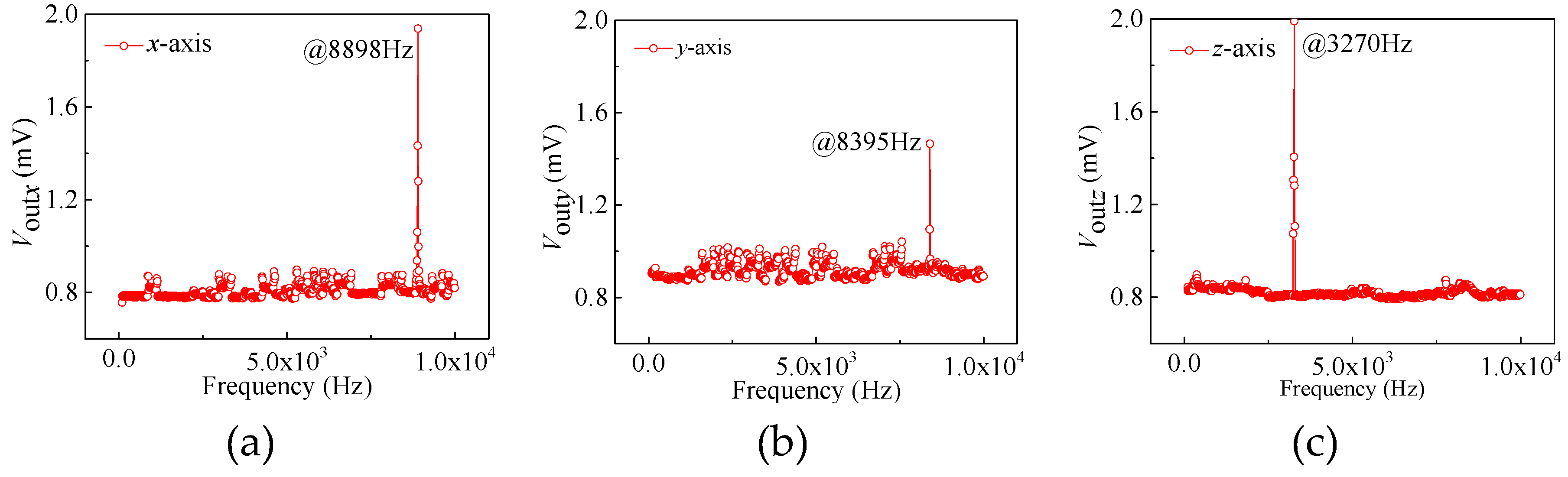
4.1. Frequency Response Characteristics
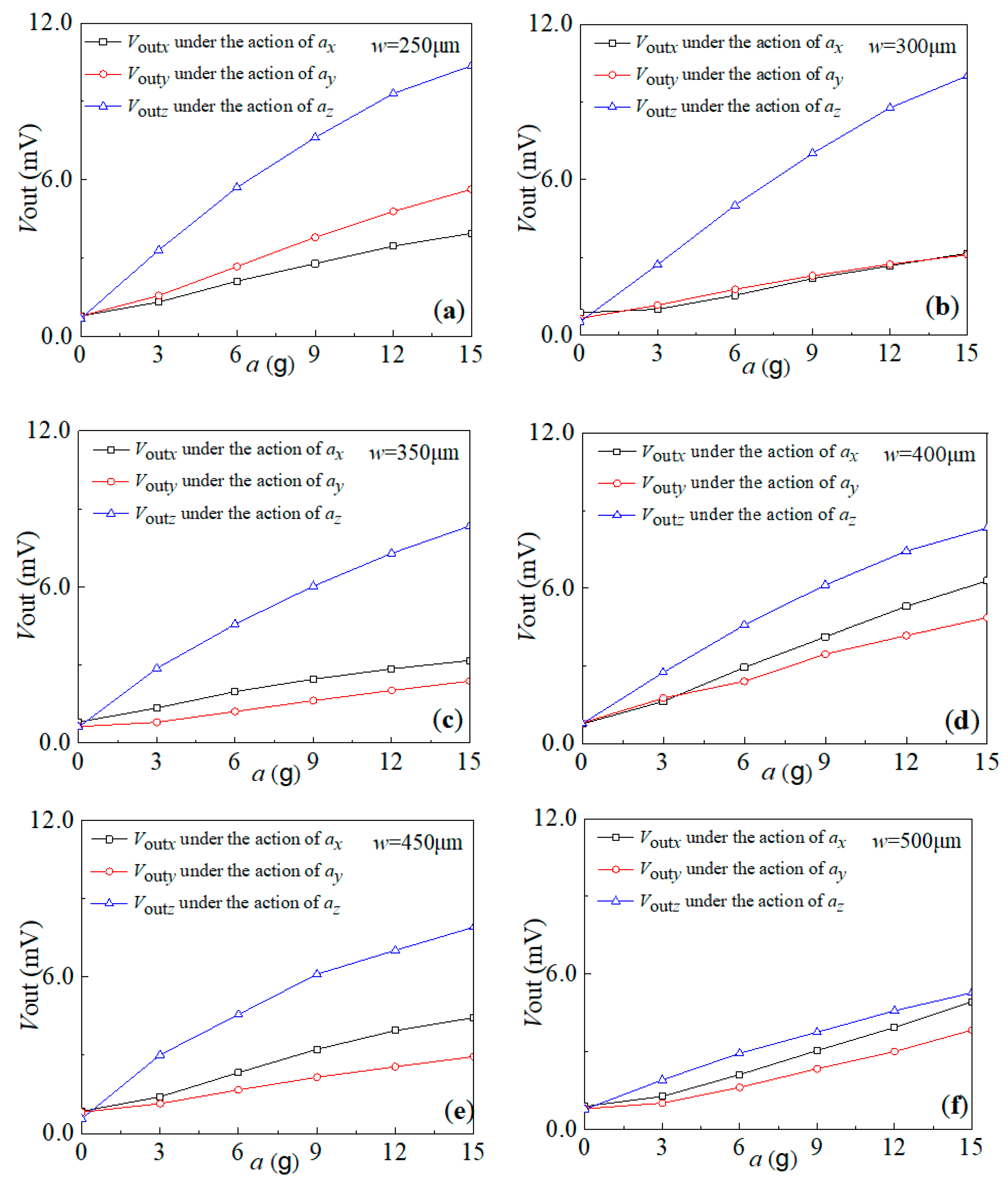
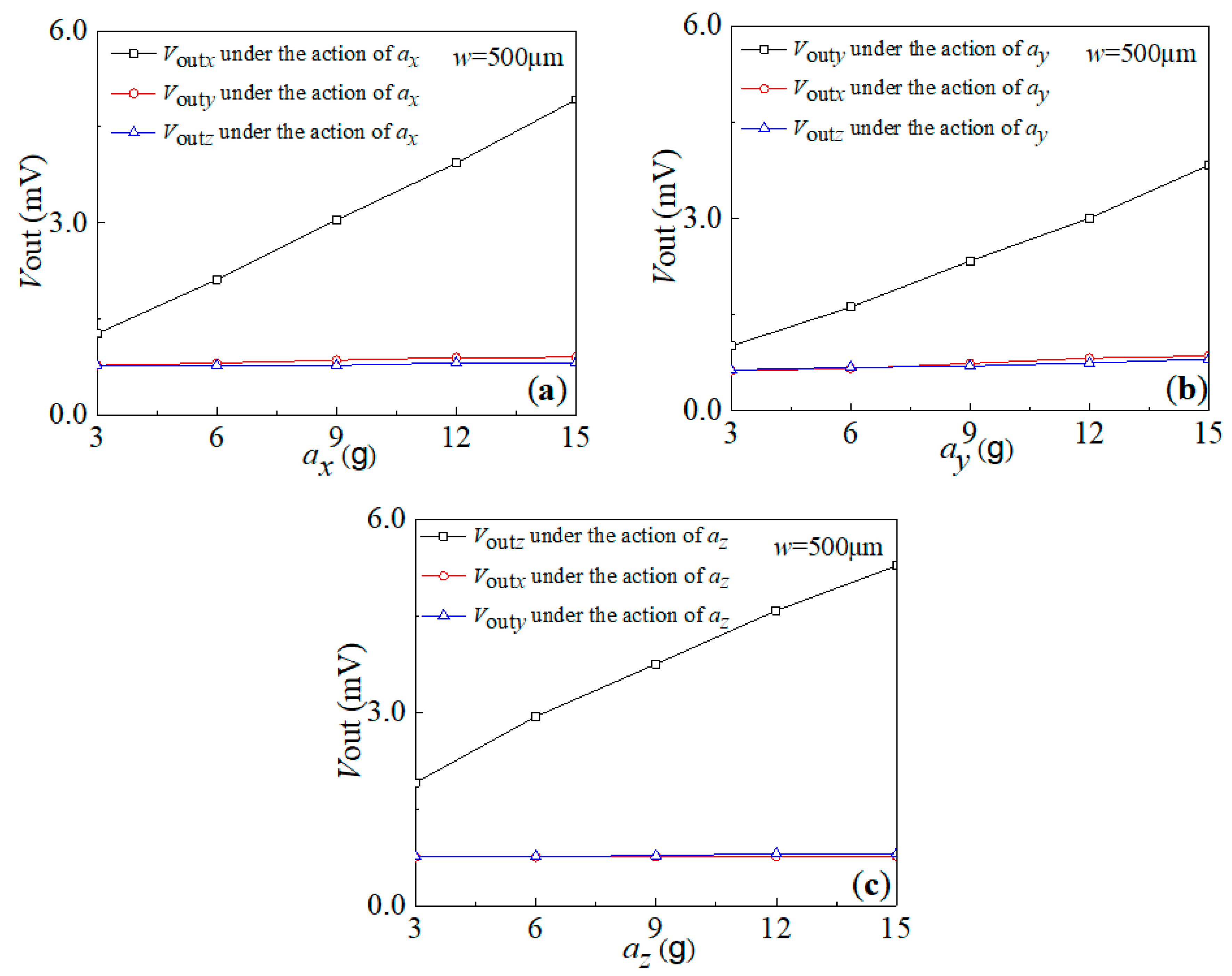
4.2. Sensitivity and Cross Interference Characteristics
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Varanis, M.; Silva, A.; Mereles, A.; Pederiva, R. MEMS accelerometers for mechanical vibrations analysis: A comprehensive review with applications. J. Braz. Soc. Mech. Sci. Eng. 2018, 11, 527. [Google Scholar] [CrossRef]
- Balfas, M.; Ahamed, S.I.; Tamma, C.; Arif, M.; Kattan, A.J.; Chu, W. A Study and Estimation a Lost Person Behavior in Crowded Areas Using Accelerometer Data from Smartphones. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference, Tokyo, Japan, 23–27 July 2018. [Google Scholar]
- Kapti, A.O.; Muhurcu, G. Wearable acceleration sensor application in unilateral trans-tibial amputation prostheses. Biocybern. Biomed. Eng. 2014, 34, 53–62. [Google Scholar] [CrossRef]
- Marco, M.; James, N.; Chrysovalantis, P. Mechanical structural design of a MEMS-based piezoresistive accelerometer for head injuries monitoring: A computational analysis by increments of the sensor mass moment of inertia. Sensors 2018, 18, 289. [Google Scholar]
- Theresa, L.; Oliver, G.; Alexander, B. Using MEMS acceleration sensors for monitoring blade tip movement of wind turbines. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018. [Google Scholar]
- Solouk, M.R.; Shojaeefard, M.H.; Dahmarde, M. Parametric topology optimization of a MEMS gyroscope for automotive applications. Mech. Syst. Signal Process. 2019, 128, 389–404. [Google Scholar] [CrossRef]
- Yang, B.; Xi, J.; Yang, J.; Xue, L. An alignment method for strapdown inertial navigation systems assisted by doppler radar on a vehicle-borne moving base. Sensors 2019, 19, 4577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohankumar, P.; Ajayan, J.; Yasodharan, R.; Devendran, P.; Sambasivam, R. A review of micromachined sensors for automotive applications. Measurement 2019, 140, 305–322. [Google Scholar] [CrossRef]
- Sankar, A.R.; Das, S. A very-low cross-axis sensitivity piezoresistive accelerometer with an electroplated gold layer atop a thickness reduced proof mass. Sens. Actuators A Phys. 2013, 189, 125–133. [Google Scholar] [CrossRef]
- Han, J.; Zhao, Z.; Niu, W.; Huang, R.; Dong, L. A low cross-axis sensitivity piezoresistive accelerometer fabricated by masked-maskless wet etching. Sens. Actuators A Phys. 2018, 283, 17–25. [Google Scholar] [CrossRef]
- Takahashi, H.; Kan, T.; Nakai, A.; Takahata, T.; Usami, T.; Shimoyama, I. Highly sensitive and low-crosstalk angular acceleration sensor using mirror-symmetric liquid ring channels and MEMS piezoresistive cantilevers. Sens. Actuators A Phys. 2019, 287, 39–47. [Google Scholar] [CrossRef]
- Bakhoum, E.G.; Cheng, M.H.M.; Kyle, R.A. 3-Axis, ultrahigh-sensitivity, miniature acceleration sensor. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 244–250. [Google Scholar] [CrossRef]
- Zhao, X.; Li, S.; Ai, C.; Liu, H.; Wen, D. Fabrication and characterization of the Li-Doped ZnO thin films piezoelectric energy harvester with multi-resonant frequencies. Micromachines 2019, 10, 212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, X.; Wen, D.; Li, G. Fabrication and characteristics of the nc-Si/c-Si heterojunction MOSFETs pressure sensor. Sensors 2012, 12, 6369–6379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Singh, R.; Ngo, L.L.; Seng, H.S.; Mok, F.N.C. A silicon piezoresistive pressure sensor. In Proceedings of the First IEEE International Workshop on Electronic Design, Test and Applications ’2002, Christchurch, New Zealand, 29–31 January 2002. [Google Scholar]
- Munro, D. DIY MEMS; Springer: Berlin, Germany, 2019; pp. 31–47. [Google Scholar]
- Dong, Y.; Min, X.; Kim, W.S. A 3D-printed integrated PCB-based electochemical sensor system. IEEE Sens. J. 2018, 18, 2959–2966. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | AS-1 | AS-2 | AS-3 | AS-4 | AS-5 | AS-6 |
|---|---|---|---|---|---|---|
| w (μm) | 250 | 300 | 350 | 400 | 450 | 500 |
| Type | w (μm) | Resonance Frequency along x-axis (Hz) | Resonance Frequency along y-axis (Hz) | Resonance Frequency along z-axis (Hz) |
|---|---|---|---|---|
| AS-1 | 250 | 9106 | 8956 | 3211 |
| AS-2 | 300 | 9374 | 7963 | 3221 |
| AS-3 | 350 | 7787 | 8957 | 3314 |
| AS-4 | 400 | 8692 | 8694 | 3250 |
| AS-5 | 450 | 7996 | 8348 | 3109 |
| AS-6 | 500 | 8898 | 8395 | 3270 |
| Type | w (μm) | Sxx (mV/g) | Syy (mV/g) | Szz (mV/g) | Linearity (x-axis) | Linearity (y-axis) | Linearity (z-axis) |
|---|---|---|---|---|---|---|---|
| AS-1 | 250 | 0.211 | 0.324 | 0.646 | 3.3% | 2.7% | 9.1% |
| AS-2 | 300 | 0.135 | 0.163 | 0.633 | 7.6% | 5.4% | 6.8% |
| AS-3 | 350 | 0.158 | 0.117 | 0.515 | 7.1% | 5.5% | 7.2% |
| AS-4 | 400 | 0.369 | 0.271 | 0.504 | 3.0% | 3.2% | 8.3% |
| AS-5 | 450 | 0.239 | 0.142 | 0.470 | 5.3% | 3.5% | 10.0% |
| AS-6 | 500 | 0.302 | 0.235 | 0.347 | 4.1% | 3.4% | 3.4% |
| Characteristic Parameters | Resonant Frequency (Hz) | Bandwidth (Hz) | Sensitivity of the Sensor along the x-axis, y-axis and z-axis under Resonant Frequency (mV/g) | |||
|---|---|---|---|---|---|---|
| Acceleration Sensor | ax | ay | az | |||
| Sensor along x axis | 8898 | 100–8000 | 0.302 | 0.011 | 0.004 | |
| Sensor along y axis | 8395 | 100–7500 | 0.019 | 0.235 | 0.014 | |
| Sensor along z axis | 3270 | 100–3000 | 0.001 | 0.004 | 0.347 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhao, X.; Wen, D. Fabrication and Characteristics of a Three-Axis Accelerometer with Double L-Shaped Beams. Sensors 2020, 20, 1780. https://doi.org/10.3390/s20061780
Wang Y, Zhao X, Wen D. Fabrication and Characteristics of a Three-Axis Accelerometer with Double L-Shaped Beams. Sensors. 2020; 20(6):1780. https://doi.org/10.3390/s20061780
Chicago/Turabian StyleWang, Ying, Xiaofeng Zhao, and Dianzhong Wen. 2020. "Fabrication and Characteristics of a Three-Axis Accelerometer with Double L-Shaped Beams" Sensors 20, no. 6: 1780. https://doi.org/10.3390/s20061780