1. Introduction
Resolving carrier phase ambiguities quickly and reliably is very important for ensuring the positioning timeliness and accuracy, or for developing new fields in high-precision dynamic positioning applications with the global navigation satellite system (GNSS). For a long time, many ambiguity resolution (AR) methods were based on the least-squares (LS) estimation [
1,
2,
3,
4], where the float solution and variance-covariance can be obtained and further adjusted to an integer value through some certain estimator, such as rounding [
5], bootstrapping [
6], and integer LS [
7]. These methods have improved the reliability of ambiguity resolution to a certain extent and greatly promoted the development of GNSS real-time and high-precision positioning.
In recent years, with the modernization of the GNSS, more multi-frequency signals will become available for end users. With multi-frequency signals, more useful combinations can be formed, which will benefit AR. The most representative methods are triple-carrier ambiguity resolution (TCAR) [
8,
9] and cascade integer resolution (CIR) [
10,
11]. The basic principle of both approaches is essentially the same. The approach starts with the easy-to-fix, extra-wide lane (EWL) combination and steps to the shorter wavelength wide-lane (WL) and narrow-lane (NL) combinations sequentially, whereby the WL combination is used to bridge the longest wavelength EWL and the shortest wavelength NL. Following on from these studies, a large amount of work has been carried out on triple-frequency ambiguity resolution using the TCAR/CIR or modified TCAR/CIR methods [
12,
13,
14,
15].
Given that the ambiguity is fixed step by step, the accuracy and reliability of EWL AR is the premise and foundation, which will directly affect the WL/NL AR and the positioning result. For EWL AR, generally, the geometry-free (GF) and the geometry-based (GB) models may be used. The general GF model can be formed as the linear combination between virtual code and phase measurements, or between two phase measurements to eliminate or reduce the geometry-related terms. Feng et al. [
16] described a general model using triple-frequency simultaneous measurements to obtain better GF combinations. To further reduce the influence of ionospheric delay, many studies have constructed a geometry- and ionosphere-free (GIF) model to obtain a better AR success rate [
17,
18,
19]. For the general GB model, which can be formed with phase measurements, it is important to note that this model includes the effects of orbital, ionospheric, and tropospheric biases, as well as phase noises. However, the model is usually used in network real-time kinematic (RTK) positioning as the inter-station baseline parameters are precisely known and can be exploited to benefit the estimation of other parameters. Feng identified the three most useful combinations for each of the three frequency GNSS services based on the total noise level [
20]. Furthermore, many studies [
21,
22,
23] have discussed the optimal combinations that are suitable for the GB model under different error budget assumptions. Similar to the GIF model, to eliminate the double-difference (DD) ionospheric delays, Gao et al. [
23] derived a modified ionosphere-free model for the second EWL/WL AR. In general, the above two types of models usually achieve a higher success rate due to the long wavelengths of the EWL.
The previous studies have demonstrated that the signals of the additional frequency can improve the AR performance, but the AR success rate for the majority of combined EWL observations has not attained 100%, especially in the case of long baselines [
19,
23,
24]. However, given that the ambiguity is an unknown parameter, there is no truth value for the reference in the actual application to validate its accuracy. An incorrect integer ambiguity solution, if overlooked, may cause severe bias in the fixed solution. Thus, the development of a reliable procedure for ambiguity validation is essential. This has proved to be a challenging task for some decades now and is still far from being resolved [
25,
26]. For the ambiguity validation, the most widely used method is to compare the minimum quadratic form of the residuals and the second quadratic form of the residuals in different ways. The commonly used methods are the F-ratio test [
27], the R-ratio test [
28], the W-ratio test [
29], the difference test [
30], and the projector test [
31]. The question is how to choose the critical value? Different values have been proposed based on empirical results; however, such values seem only able, for the most part, to give good performance for the given data and the specific measurements considered. To choose proper critical values for the ratio test, Hou et al. [
32] proposed the fixed failure-rate ratio test (FFRT), which generated critical values according to user-defined tolerable failure rates. Teunissen and Verhagen pointed out that the critical value should be different with the different measurement models and observation conditions; he then studied the R-ratio test based on the fixed failure rate and developed the so-called “look-up table” for ambiguity validation [
33,
34,
35]. However, this table is not universal and is very computationally time-consuming [
26]. Instead of using an empirical constant detection threshold or a fixed failure/success rate requirement in the ratio tests for ambiguity validation, Li et al. [
36] proposed an integrity monitoring-based ratio test, which used the ambiguity protection level to control the false alarm and missed detection errors.
The above methods of ambiguity validation are based mainly on the float ambiguity and variance obtained through the LS method. However, the integer rounding estimator is always used for the EWL ambiguity resolution as the effect of noise concerning the wavelength of the combined observation is sufficiently small; that is, we cannot calculate the variance of the ambiguity float, which is different from the LS estimation. Therefore, a routine statistical test method for validating the ambiguity is generally not applicable. Some studies have analyzed the AR success rate of EWL based on prior information of the observation noise and atmospheric error and some useful conclusions have been reached [
18,
19,
23]. However, a priori knowledge of observation bias is indispensable for the evaluation of the success rate of TCAR, but this is difficult to acquire in real-world applications. The reliability of the success-rate-based evaluation method is therefore limited by the unknown bias [
37].
To obtain a reliable ambiguity validation of TCAR, based on the theory of gross error detection, this study aimed to study an EWL ambiguity validation method in real-time. The paper is organized as follows:
Section 2 presents the basic equations and definitions of triple-frequency BDS observation, and in
Section 3, the method for EWL AR for observation
is analyzed.
Section 4 gives some discussion on the EWL ambiguity validation.
Section 5 presents a method for EWL ambiguity validation based on gross error detection. In
Section 6, the results of several sets of experiments are presented. Finally, the conclusions are summarized.
2. Basic Equations and Definitions of Triple-Frequency BDS Observations
For triple-frequency signals, the combined double-difference (DD) observations of the code
and the carrier phase
in meters (m) can be expressed separately as follows:
where
is the DD operator and the subscripts (
i,j,k) represent the frequencies used in the combination [
21].
denotes the distance between the satellite and the receiver, and
T and
I are the tropospheric delay and ionospheric delay, respectively. The combined DD code and phase can be expressed as:
where the symbols
and
are the DD code and phase measurements of the distance for the
ith frequency
[
38].
and
represent the combined wavelength and integer ambiguity of the carrier phase, which can be expressed as:
where
C is the speed of light and the ionospheric scale factors (ISF)
are defined as:
and where
and
refer to the noise of the combined code and phase observation, respectively, in meters. Assuming the three carrier measurements have the same precisions, that is,
, then the standard deviation (STD) of the combined phase noise
can be expressed as follows:
where
denotes the noise scale factors (NSFs). For the pseudo-range of the BeiDou Navigation Satellite System (BDS), the code chipping rate on B3 is different from those on B1 and B2, assuming that
[
22], and the STD of the combined phase noise
is given as:
3. AR Model for EWL Observation
From Equations (5) to (8) given above, it can be seen that different combinations of
i,
j, and
k correspond to different errors. As for AR, given the long wavelength of the EWL combination, the ionospheric delay and observation noise are ignored here, and a rounding strategy is employed to fix the ambiguity to produce a high success rate. Moreover, among all the EWL and WL combinations, as long as the sum of the combined coefficients is zero, that is,
, only two are independent [
20,
21]; in other words, we can use two groups of ambiguities with a high success rate to deduce the ambiguities of other linear-correlation combined observations using a simple transformation. According to Tang et al. [
22] and Li et al. [
39], two groups of optimal coefficients of EWL combinations for BDS are (0, −1, 1) and (1, 4, −5), whose wavelengths are 4.48 m and 6.37 m, respectively. Thus, a fixed solution for the EWL ambiguity with a high success rate can be obtained via rounding. Many researchers have studied this aspect and proposed several very reliable solutions [
15,
19,
23,
24].
For the ambiguity
, the GIF mode can be formed with EWL observation
and
, and the ambiguity can be easily fixed using a single epoch, that is:
where
represents the rounding operator. The AR accuracy is only affected by the observation noise of the carrier and the pseudo-range. Experiments showed that even when the observation noise is large, for example,
and
, the success rate can reach 100%, which is more reliable, and thus it can be used in the first step of all TCAR methods [
19,
23,
24]. Therefore, this study focused on the ambiguity resolution and validation for EWL observation
. Generally, GB and GF models are available for EWL AR. The GB model is more commonly used for AR between network RTK reference stations. This model is based on the LS principle and can be combined with least-square ambiguity decorrelation adjustment (LAMBDA) to validate ambiguity reliability [
21,
22], which is similar to the traditional method for a dual frequency and will not be discussed in detail here. As for the GF model, concerning Equations (1) and (2), the general expression for the ambiguity solution is:
The ambiguity is mainly affected by the observed noise and the ionospheric delay, which are usually ignored in the actual solution. Therefore, the STD
and the systematic bias
of the float ambiguity estimations can be derived according to the variance-covariance propagation laws, which are expressed as:
Then, the float ambiguity estimations obey the following distribution:
The AR success rate, known as the AR reliability, is defined as the percentage of the correctly solved epoch numbers out of the total epoch number [
22]. Here, the AR success rate with a rounding can be theoretically computed using Equation (14):
It can be seen that with different combinations of observations, the STD
and the systematic bias
are different, and thus the AR success rates are also different. We can select optimal pseudo-range combination observations with the minimum observed noise to construct the GF-IF model that can meet the following requirements:
Assuming the search space of each combination coefficient
i,
j, and
k is limited to [−10, 10], the traditional ergodic optimization method is adopted to obtain the optimal observation
with the minimum NSF
. In this study, we also selected the common observations
and
for AR; moreover, after the
ambiguities are resolved, the ambiguity-fixed EWL observations can be regarded as precise “pseudo-range” observations to support the resolution of the second EWL/WL ambiguity with GF mode, and the ambiguity
can be expressed as:
With the above four combined observations, we can obtain the EWL ambiguity
, and the corresponding STDs and ISFs for four different cases are shown in
Table 1.
According to Equation (12), the systematic bias
also depends on the effect of the ionospheric delay. For the 20–100-km medium–long baseline, the first-order ionospheric delay is generally <40 cm, and for the 100–500-km long baseline the ionospheric delay is <100 cm [
20,
22]; therefore, by obtaining
and
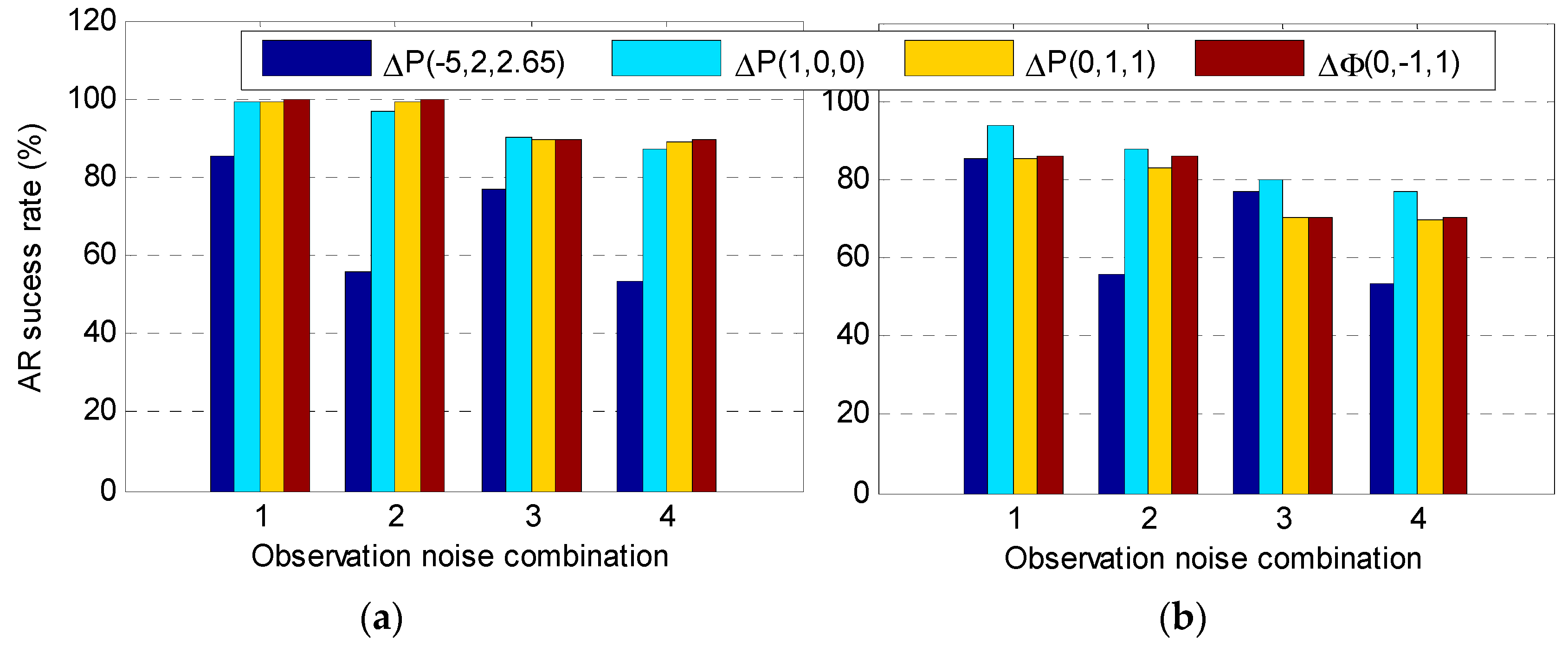
using Equation (14), the AR success rate with the above four observations at different ionospheric errors and observation noises were calculated, where the results are shown in
Figure 1.
It can be seen that when the DD ionospheric delay was 40 cm, for the ambiguity , the observations , , and attained a similar success rate for the four kinds of observation noise levels, while the optimal observation was the lowest; that is, although the GF-IF model was not affected by the ionospheric delay, it also amplified the observation noise, especially when the pseudo-range STD was large (in cases 2 and 4) such that the AR success rate was lower. If the DD ionospheric delay was 100 cm, the ambiguity success rate based on the four combined observations was less than 90% with different observation noises. In general, the ambiguity success rate obtained using observation was relatively high, which was mainly due to the small ionospheric scale factor (ISF). Therefore, in practical applications, when the ionospheric delay is large, such as in long-baseline or low-latitude regions, this combination can be used to obtain the EWL ambiguity with a higher success rate.
The above analysis was mainly based on the empirical STD and the DD ionospheric delay in order to analyze and estimate the success rate of the EWL ambiguity
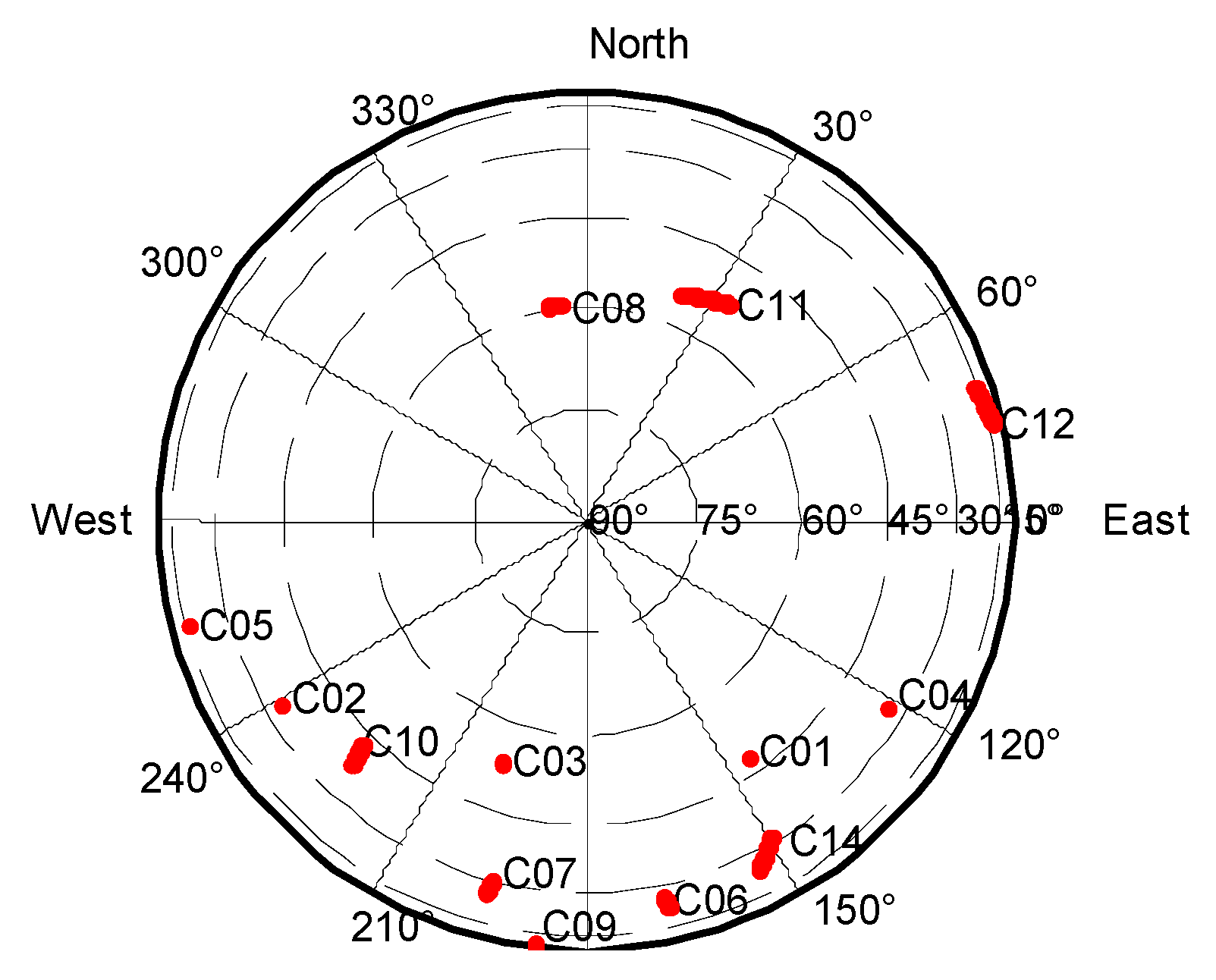
. To further compare and analyze the actual effect of the AR using the four observations, two reference stations SQXY and XYXX with a separation distance of 175 km were selected from the Henan continuously operating reference station (CORS), China. A total of 3600 epochs of data were collected with a 1 s sampling interval on 1 March 2016; a total of eight BDS satellites with an elevation cut-off angle of 15° were available for use. The above four combined observations were used to solve the ambiguity
using a single epoch. Due to the long wavelength used for the combined observations, the AR success rates of most satellites were 100%, and satellite C05 had the lowest accuracy.
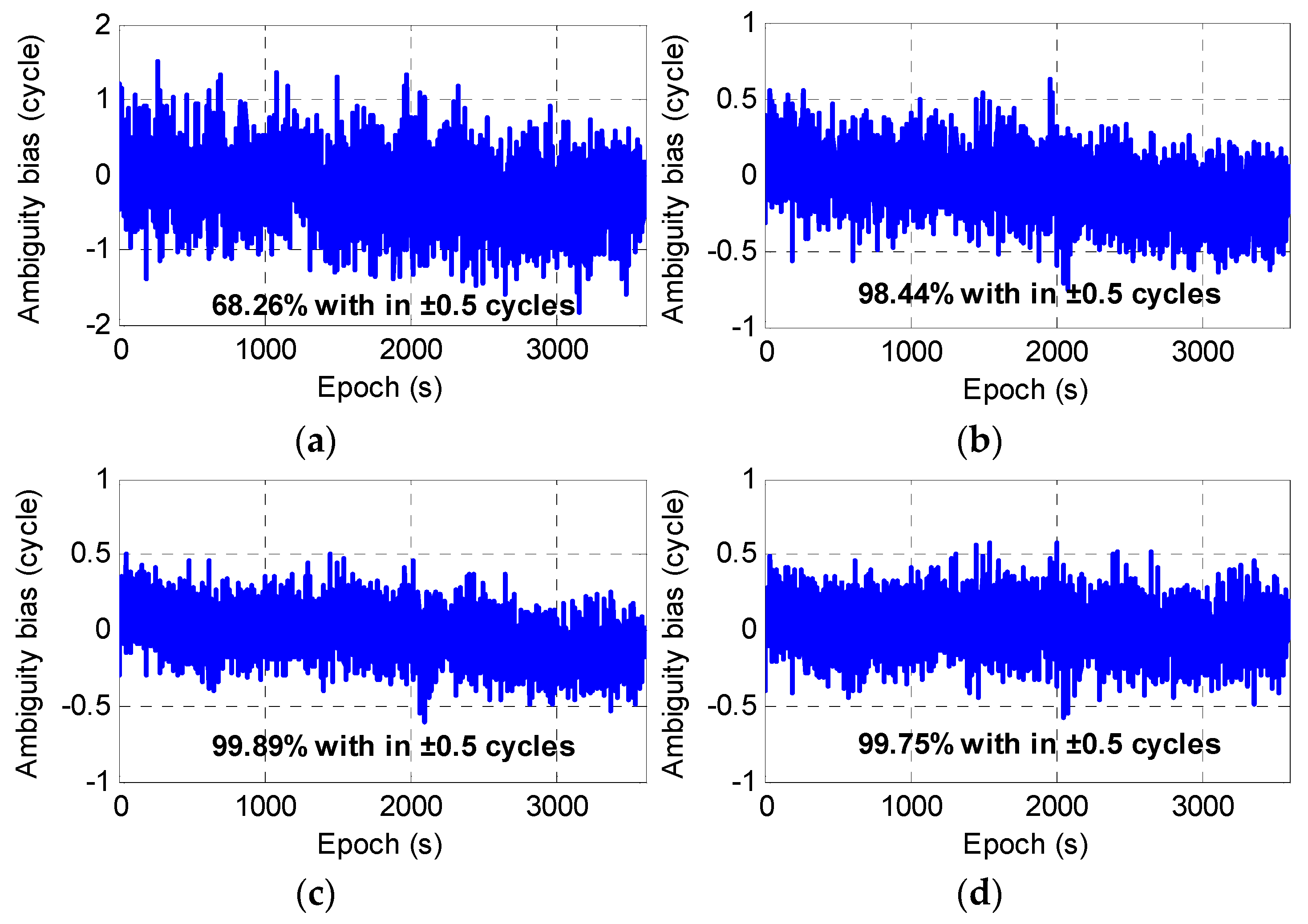
Figure 2 shows the single-epoch biases obtained by comparing the float ambiguities and their true values. In general, similar to the analysis results based on the empirical value estimation, the AR success rate with the optimal observation
was the lowest and only 68.26% were biases within ±0.5 cycles. That is, nearly one-third of the ambiguity integer estimates were incorrect. For the other three observations, the results were about the same, with the success rate exceeding 98%. The observation
gave the best result with a success rate of 99.89%.
4. Discussion on the Method of EWL Ambiguity Validation
From the above theoretical and experimental analysis, it can be seen that although the ambiguity
had a high success rate, due to the influence of observation noise and the ionospheric delay, 100% accuracy could not be guaranteed for AR in a single-epoch. For the TCAR method, the incorrect EWL ambiguity will affect the AR for the NL or the basic frequency observation, and eventually lead to a poor positioning result. Therefore, it is very important to ensure the reliability of the EWL ambiguity in real-time. Here, we will discuss some strategies to ensure the validity of the ambiguity. Taking the AR with observation
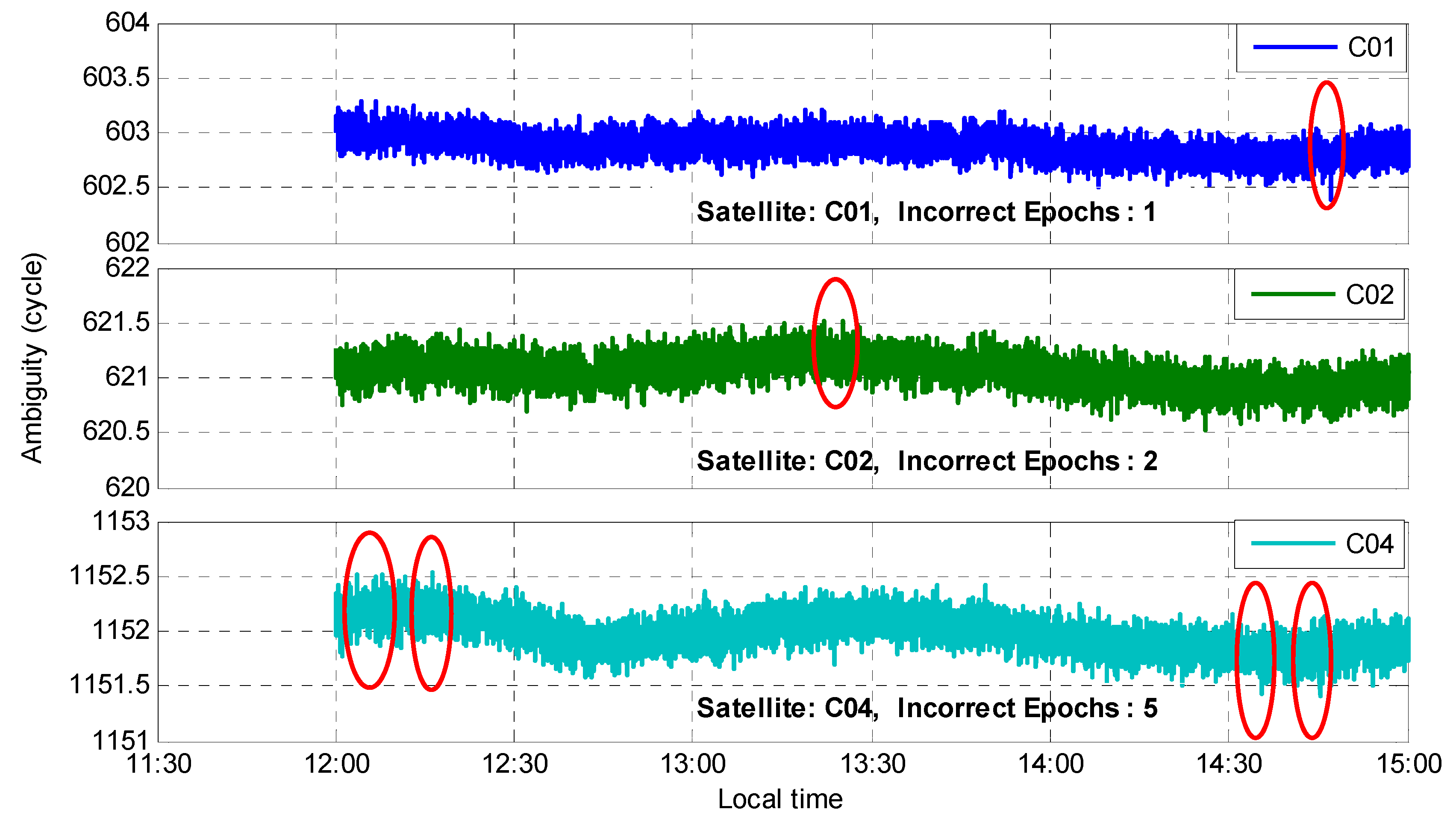
as an example, the same experimental data as in the previous section is adopted.
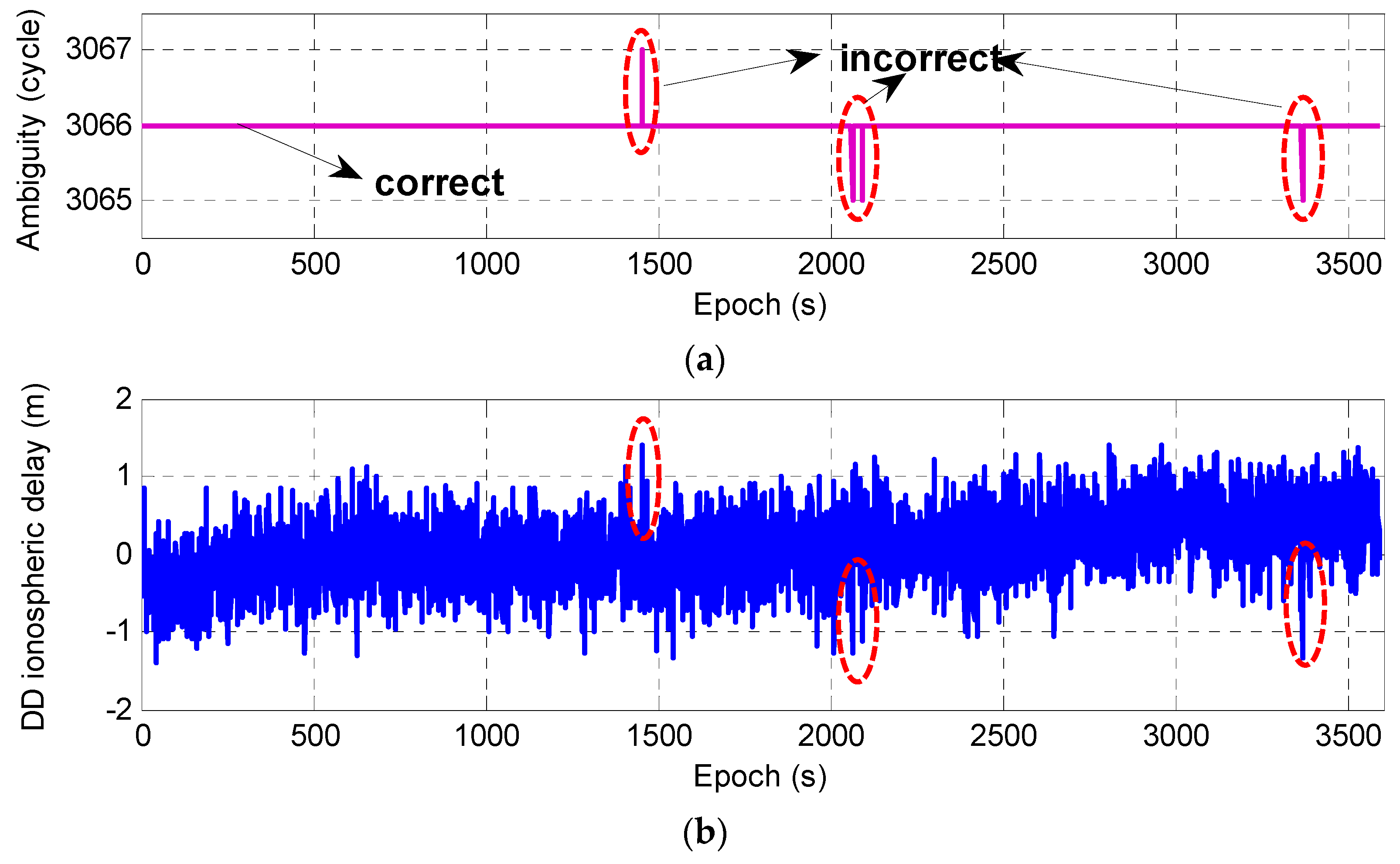
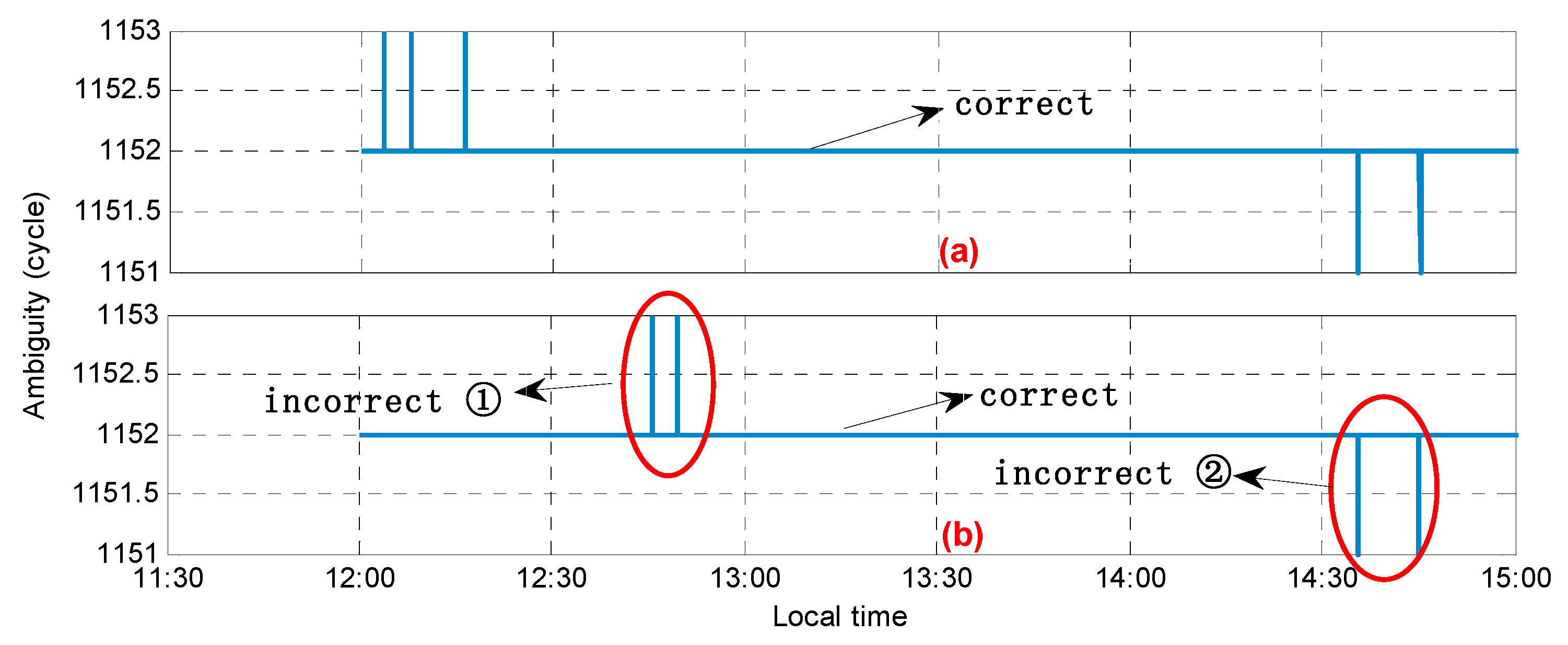
Figure 3 (top) shows the single-epoch ambiguity performance of satellite C05, where four epochs have incorrect ambiguities. In practical application, for the post-processing solution, the average value can be taken as the final accurate value to ensure the reliability of the ambiguity [
21]. For a real-time solution, the accuracy of the subsequent ambiguity can be checked by averaging the epochs one by one or comparing integer values between two consecutive epochs [
40], but this relies mainly on prior observation information. It is, however, necessary to ensure the continuity of the carrier observation and to avoid cycle slipping; moreover, this method cannot effectively be used in the initial epoch. Considering that the DD ionospheric delay can be reversed through the fixed ambiguity, we can further validate the reliability of ambiguity using the estimated ionospheric delay. Based on the fixed EWL ambiguity, the GF model can be formed with observations
and
, and the DD ionospheric delay may be expressed as follows:
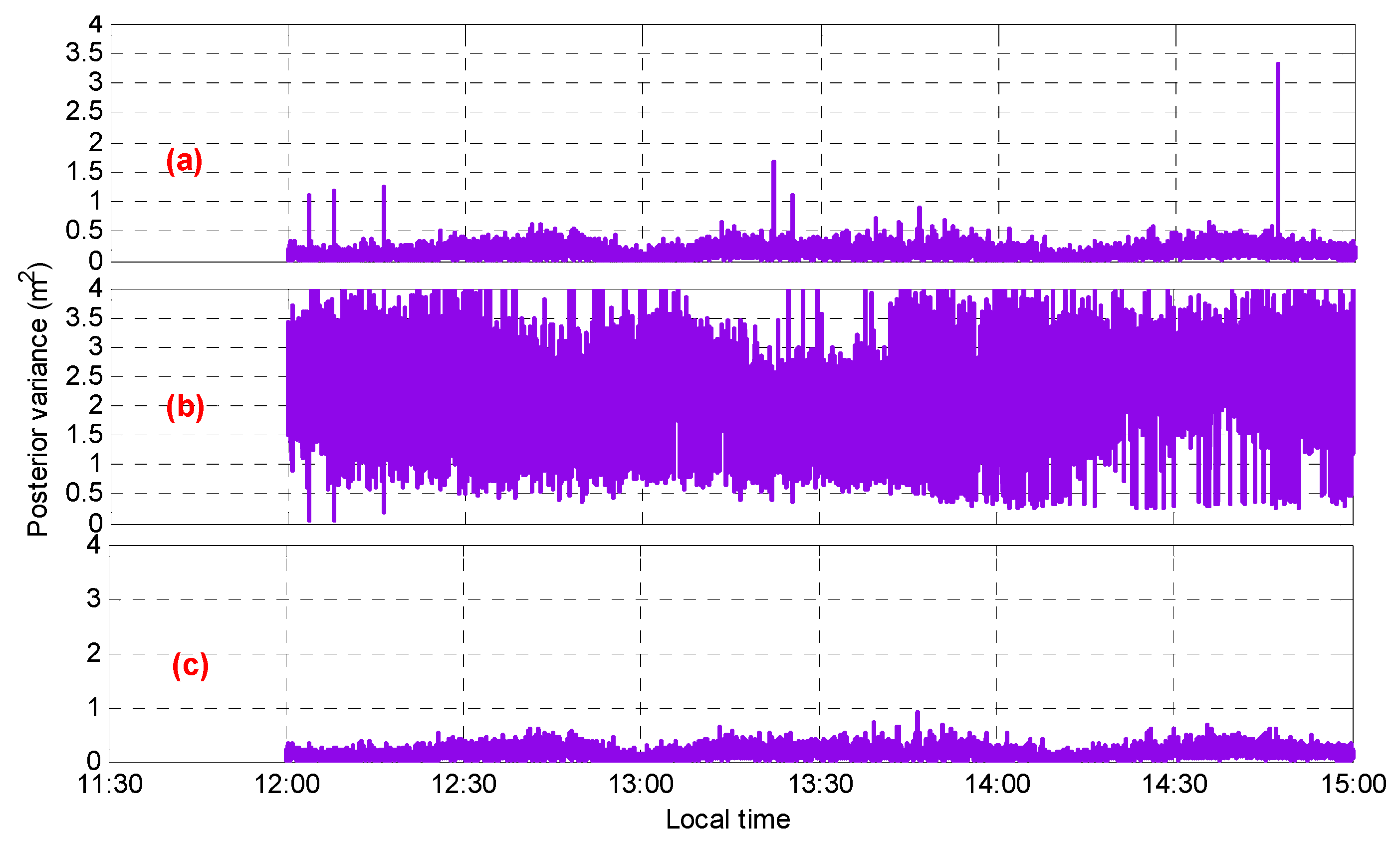
From Equation (17), assuming the combined pseudo-range
was selected, when there was one cycle error in the ambiguity, the DD ionospheric delay caused a bias of nearly 3 m.
Figure 3b shows the DD ionospheric delay for each epoch for satellite C05. It can be seen that when the ambiguity was incorrect, there was some abnormality in the corresponding DD ionospheric delay. However, due to the large noise and randomness of the observation, the abnormal values were not very prominent in the experiment. Therefore, it was difficult to give an appropriate threshold to validate the reliability of the ambiguity through ionospheric outliers.
In this paper, based on the theory of gross error detection, according to the AR characteristics of the EWL, we took the influence of the incorrect ambiguity on the observation as a gross error, with the principle of the smallest posterior variance being used to realize the validation of the EWL ambiguity.
5. Ambiguity Validation Based on Gross Error Detection
With an estimated DD ionospheric delay and fixed EWL ambiguity, a model for relative positioning was constructed. For relative positioning, the coordinates of the base station A are usually known. As a point to be determined, the initial coordinates of station B can generally be obtained using single-point positioning, assuming the initial coordinates are
and the corresponding correction is
. For the tropospheric delay, this can be expressed as the product of the zenith total delay (ZTD) and the mapping function (MF), which is a function of the elevation angle of the satellite. The ZTD is composed of the zenith hydrostatic delay (Zhd) and the zenith wet delay (Zwd). The dry component Zhd is estimated through the global pressure and temperature (GPT) model, while the wet component Zwd is estimated as unknown parameters in the observation model. As for the mapping function, the Hopfield model was adopted here. The error equation is obtained after linearization, that is:
where
;
is the single difference (SD) operator between satellites;
are the linearization coefficients in all directions;
E represents the elevation of the satellite; and
.
can be expressed as:
where
denotes the distance between the satellite and the receiver with the initial coordinate value of station
B, and
is the dry component of the tropospheric delay.
Assuming that the weighting of each satellite observation is the same, the parameter estimates and the residuals can be obtained through the LS method. The residual can reflect the quality of the corresponding observations to a certain extent, and we considered the influence of the incorrect ambiguity on the observation as a gross error. Combining Equations (17) and (19), it was deduced that when the ambiguity
has a
-cycles error, the added gross error
in the observation may be expressed as:
where the first term on the right side of the equation is the influence of the incorrect ambiguity on the DD ionospheric delay. For example, if the observation
is used to estimate the DD ionospheric delay, when
cycle, the gross error
will be ±4.519 m, which will affect the residuals of all observations to different degrees; that is, we can validate the ambiguity using the residual. The standardized residual is more commonly used and can be denoted as:
where
is the a priori variance and
is the redundancy number. If the observations have equal weight, the matrix
R of the redundancy number can be expressed as:
where
I is the identity matrix. When the number of observations with gross errors is
q, the effect on the
ith residual
is:
That is, the residual
contains the influence of all the gross errors, the size of which depends on the redundancy number corresponding to each gross error. In particular, if only one observation has a gross error, the impact of this gross error on each residual is
. The experiment showed that
; that is, the gross error affected its own residuals much more than other residuals. Similarly, the corresponding standardized residuals may have a greater probability of being larger than others. However, when multiple observations contain gross errors, the effects of the gross errors on the residuals may cancel each other out. At this time, regarding the residuals, it is more difficult to reflect on whether the observations contain gross errors, but as long as only one or two observations contain a gross error, it is feasible to detect the gross error from the abnormal residuals [
41]. At this point, it is generally the case that the first two gross errors that are detected are responsible. Moreover, the EWL ambiguity resolutions for each satellite are independent of each other, and they also have a high success rate, as was the case in the previous section. Furthermore, the probability that many ambiguities are incorrect in the same epoch is generally small. Therefore, in a single epoch, when only one or two satellites have incorrect ambiguities, it is feasible to perform ambiguity validation using gross error detection.
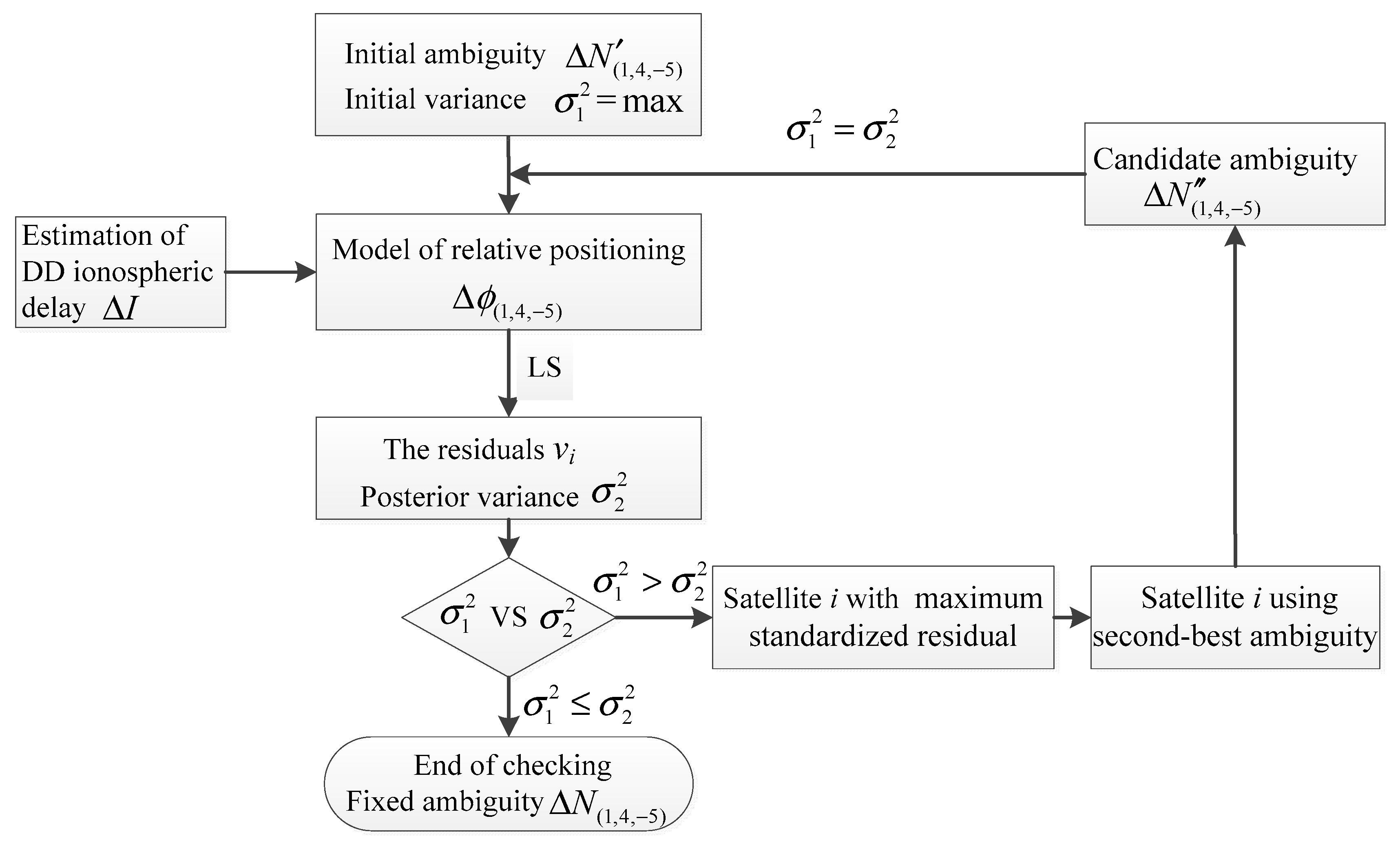
However, for gross error detection, it is difficult to specify a suitable threshold for standardized residuals to validate whether the observation contains a gross error. Due to the long wavelength of EWL observation, the total error of AR is generally within 0.5 cycles, and the fixed ambiguity with the highest reliability is usually the two that are nearest to the floating ambiguity. For example, if the floating ambiguity is 8.3 cycles, the maximum probability of the fixed value is 8 or 9, while it is almost impossible to be 7 or 10 cycles because this would mean that the total error of the observation reaches 1.3 cycles (8.2 m) or 1.7 cycles (10.8 m). For this reason, we can choose the two ambiguities with the highest reliability as the candidate values and further determine the exact one by comparing the posterior variance. Based on the above analysis, this study proposed a method for validating the reliability of the EWL ambiguity
, as shown in
Figure 4. The approach mainly relied on the following steps:
Step 1: The initial fixed ambiguity is obtained based on the GF model.
Step 2: The DD ionospheric delay is estimated, and the model of the relative positioning is constructed with the estimated DD ionospheric delay and the initial fixed ambiguity.
Step 3: The residual and the posterior variance are obtained through the LS method. Assuming that the initial ambiguity corresponding to the maximum standardized residual is incorrect and replaced by the second-best ambiguity of this observation, while the other ambiguity values are unchanged, a new set of candidate ambiguities can be reconstructed. The new posterior variance will be obtained through the LS method.
Step 4: When comparing the two posterior variance values, if , it is considered that the original hypothesis is wrong and there is no gross error in the observation; that is, the initial ambiguity is correct. On the contrary, if the original hypothesis is established, the candidate ambiguity is selected as the accurate value and the process returns to step 2 to continue to validate the reliability of other ambiguities.
7. Conclusions
Ambiguity reliability plays an important role in ensuring the accuracy and timeliness of GNSS high-precision positioning. The Chinese BDS is the first fully available triple-frequency GNSS system that provides positioning, navigation, and timing services independent of a GPS, and brings opportunities and challenges for GNSS positioning. Regarding the resolution and validation of EWL ambiguity , this research first compared and analyzed the AR performance for four different combined observations from both a theoretical basis and with measured data. The study showed that the GIF model constructed with optimal pseudo-range observation had the lowest AR success rate, which was only 68.26%, while the ambiguities obtained by the other three observations gave approximately the same accuracy, with the success rates all being over 98%, but none reaching 100%. On this basis, because the AR for each satellite was relatively independent and the candidate ambiguity with high reliability usually had only two values, combined with the principle of gross error detection, a method for validating the reliability of the EWL ambiguity using a single epoch was proposed.
The data for six different baselines were selected from HNCORS and SZCORS in China. This experiment showed that in a single epoch when only one or two satellites have incorrect ambiguities, the gross error caused by the incorrect ambiguity will affect the standardized residuals of all observations to different degrees whilst having the greatest influence on its observation. The ambiguity validation based on gross error detection can be used for a real-time EWL ambiguity check and correction using a single epoch in TCAR; especially for the medium baseline, the AR success rate after validation could reach 100%. For a long baseline, due to the increase in atmospheric error, the result was affected to a certain extent. However, compared with the initial ambiguity, the success rates increased from 96.82% and 98.44% to 98.80%, and 99.67%, respectively. Due to the limitations of gross error detection, the ambiguity validation method proposed in this paper applies to the condition where only one or two satellites have incorrect ambiguities in one epoch. Further research is needed on the case where multiple satellites have incorrect ambiguities for observations performed at the same time.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}