Precise Amplitude and Phase Determination Using Resampling Algorithms for Calibrating Sampled Value Instruments


Abstract
:1. Introduction
2. Designs and Methods
2.1. Resampling Process and Simulated Algorithms
2.1.1. Program structure of the Resampling Process
2.1.2. Interpolations Based on a Quadratic and a Cubic Function
2.1.3. Interpolation Based on a Modified Sinc Function
2.1.4. Phase Synchronisation
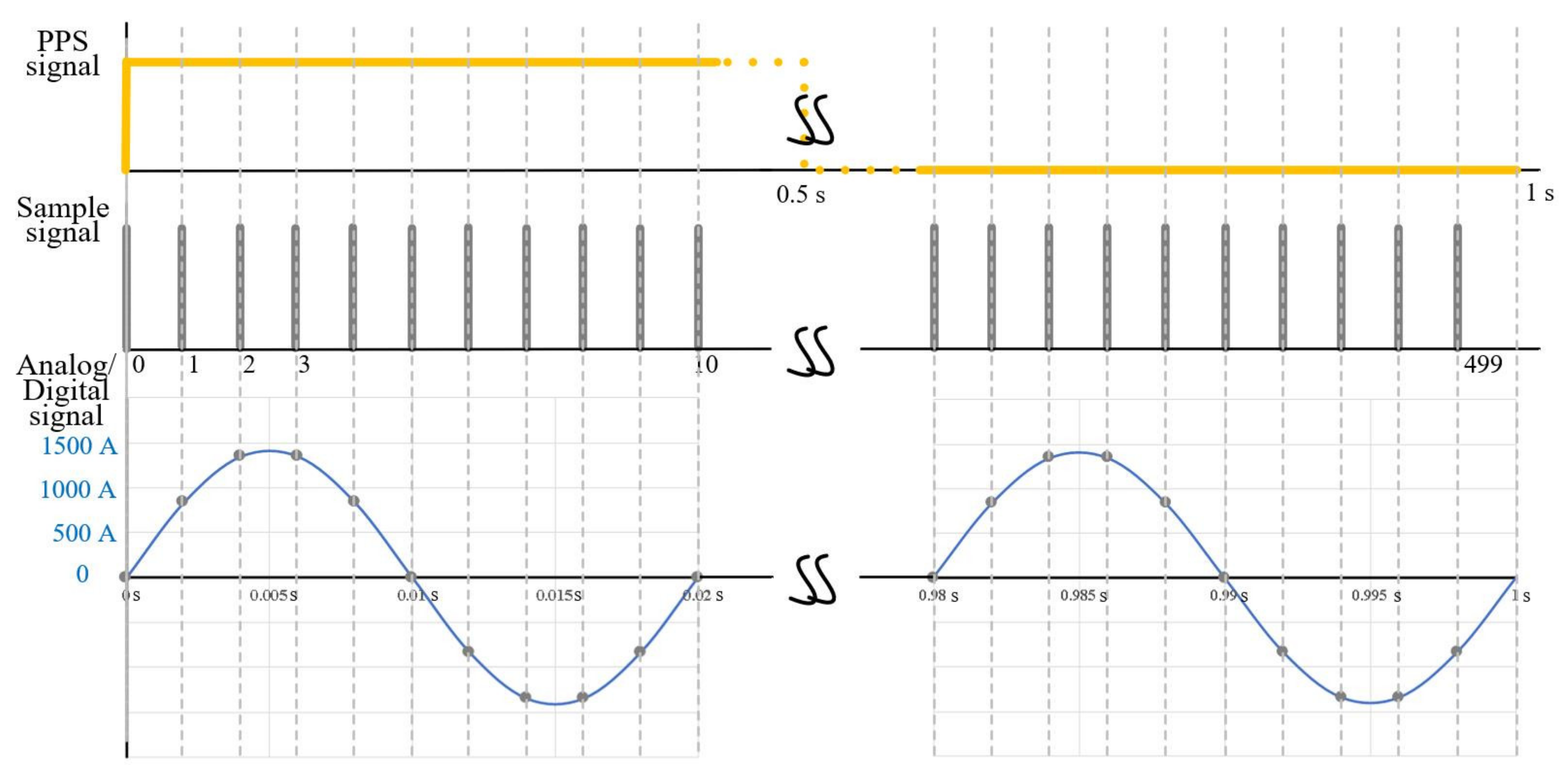
2.2. Emulation Scheme of the SV-Based Communication
3. Results and Validation of the Resampling Process
3.1. Simulation Results
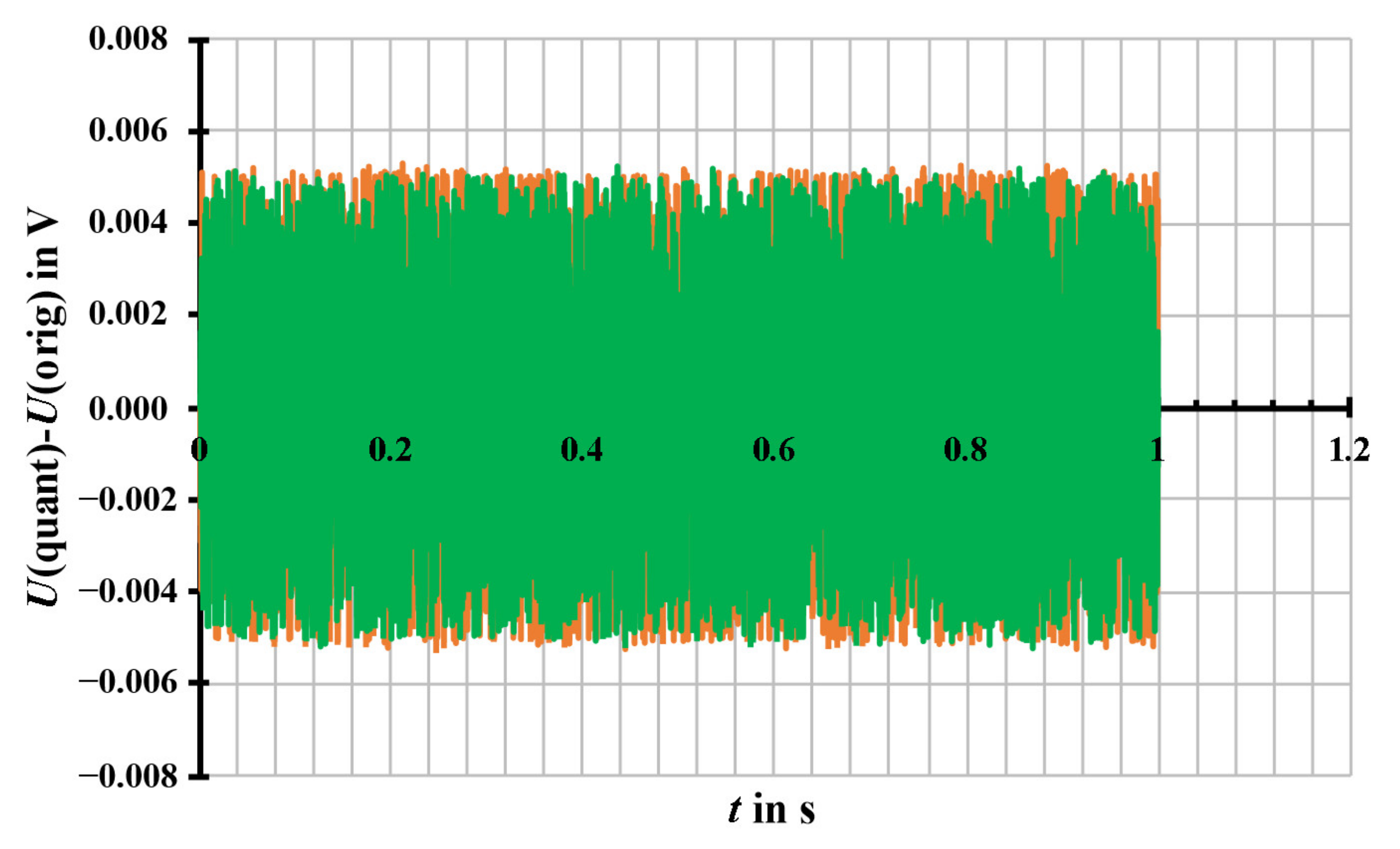
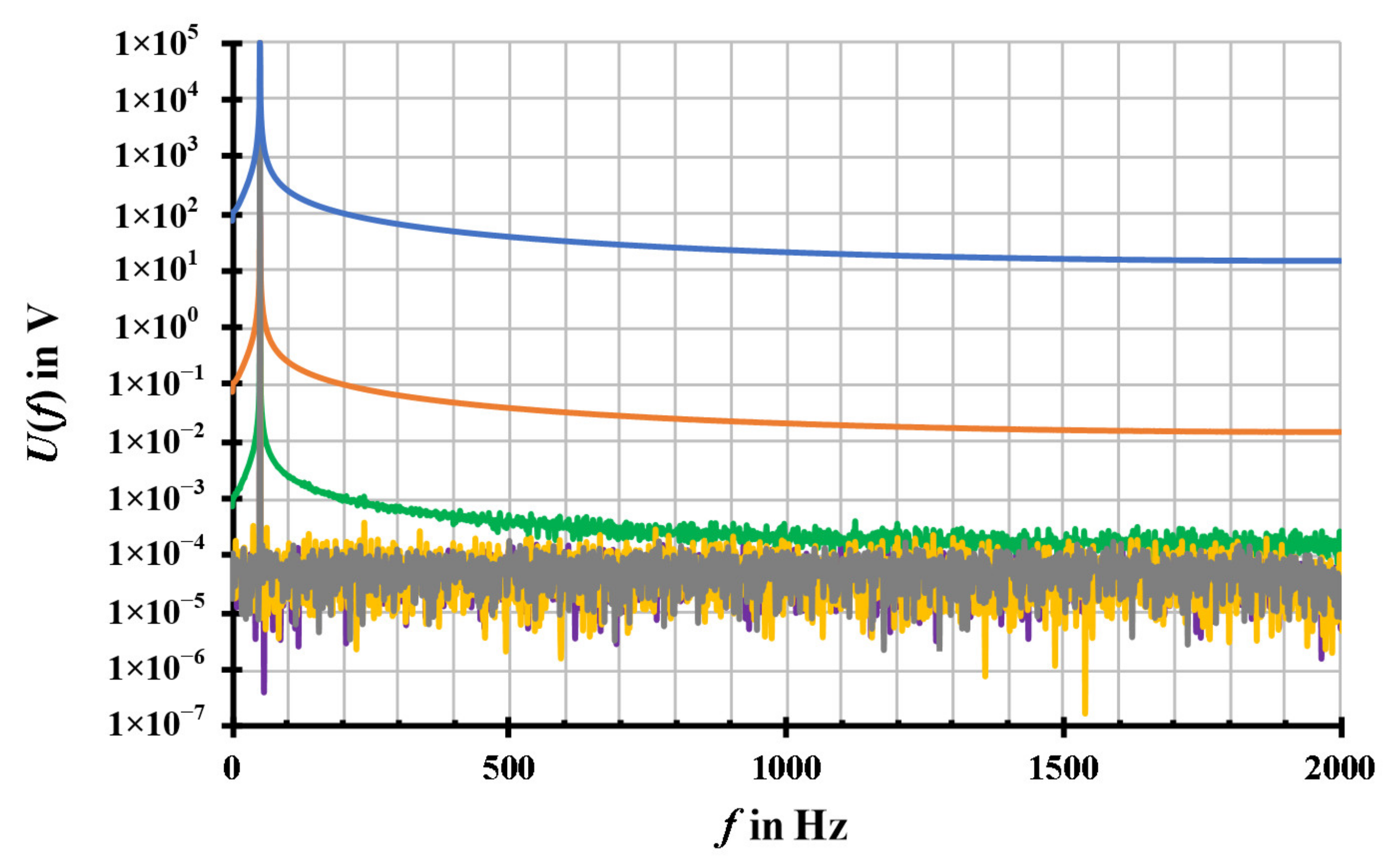
3.1.1. General Investigation Simulations
3.1.2. Frequency Response
3.1.3. Harmonics Interactions
3.2. Experimental Results Based on the Microcontroller-Based SV Devices
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Quadratic Interpolation

Appendix A.2. Cubic Interpolation

References
- Wilson, R.E. PMUs [phasor Measurement Unit]; IEEE: New York, NY, USA, 1994; Volume 13, pp. 26–28. [Google Scholar] [CrossRef]
- FutureGrid II—Metrology for the Next-Generation Digital Substation Instrumentation. Available online: https://projectsites.vtt.fi/sites/FutureGrid2/ (accessed on 28 September 2020).
- IEC 61869-9:2016 Instrument Transformers—Part 9: Digital Interface for Instrument Transformers; International Standardization Organization: Geneva, Switzerland, 2016.
- Cipolletta, G.; Delle Femine, A.; Gallo, D.; Landi, C.; Luiso, M. Design Approach for a Stand Alone Merging Unit. In Proceedings of the 16thIMEKO TC10 Conference, Berlin, Germany, 3–4 September 2019. [Google Scholar]
- Djokic, B.; Parks, H. Development of a system for the calibration of digital bridges for non-conventional instrument transformers. In Proceedings of the 2016 Conference on Precision Electromagnetic Measurements (CPEM 2016), Ottawa, ON, Canada, 10–15 July 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Mohns, E.; Mortara, A.; Cayci, H.; Houtzager, E.; Fricke, S.; Agustoni, M.; Ayhan, B. Calibration of Commercial Test Sets for Non-Conventional Instrument Transformers. In Proceedings of the IEEE International Workshop on Applied Measurements for Power Systems, AMPS 2017, Liverpool, UK, 20–22 September 2017. [Google Scholar] [CrossRef]
- Mohns, E.; Roeissle, G.; Fricke, S.; Pauling, F.; An, A.C. Current Transformer Standard Measuring System for Power Frequencies. IEEE Trans. Instrum. Meas. 2017, 66, 1433–1440. [Google Scholar] [CrossRef]
- Overney, F.; Mortara, A. Synchronization of Sampling-Based Measuring Systesm. IEEE Trans. Instrum. Meas. 2014, 63, 89–95. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, J.; Ou, Y.; Zhou, G.; Bai, F.; Zhao, X. The VPF harmonic analysis algorithm based on Quasi-synchronous DFT. Open Electr. Electron. Eng. J. 2017, 11, 114–124. [Google Scholar] [CrossRef] [Green Version]
- Štremfelj, J.; Agrez, D. Nonparametric Estimation of Power Quantities in the Frequency Domain Using Rife-Vincent Windows. IEEE Trans. Instrum. Meas. 2013, 63, 2171–2184. [Google Scholar] [CrossRef]
- Orallo, C.M.; Carugati, I.; Maestri, S.; Donato, P.G.; Carrica, D.; Benedetti, M. Harmonics Measurement with a Modulated Sliding Discrete Fourier Transform Algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 781–793. [Google Scholar] [CrossRef]
- Clarkson, P.; Wright, P. Evaluation of an asynchronous sampling correction technique suitable for power quality measurements. In Proceedings of the IEEE Trans. XIX IMEKO World Congress Fundamental and Applied Metrology, Lisbon, Portugal, 6–12 September 2009. [Google Scholar]
- Clark, F.J.J.; Stockton, J.R. Principles and theory of wattmeters operating on basis of regularly spaced sample pairs. J. Phys. E Sci. Instrum. 1982, 15, 645–652. [Google Scholar] [CrossRef]
- Ramm, G.; Moser, H.; Braun, A. A New Scheme for Generating and Measuring Active, Reactive, and Apparent Power at Power Frequencies with Uncertainties of 2.5·10−6. IEEE Trans. Instrum. Meas. 1999, 48, 422–426. [Google Scholar] [CrossRef]
- Ihlenfeld, W.G.K. Traceability of AC Voltage Ratios and AC Power by Synchronous Digital Synthesis and Sampling; PTB-Bericht, E76; Physikalisch-Technische Bundesanstalt: Braunschweig, Germany, 2001. [Google Scholar]
- Svensson, S. Power Measurement Techniques for Non-Sinusoidal Conditions—The Significance of Harmonics for the Measurement of Power and other AC Quantities. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 1999. [Google Scholar]
- Ihlenfeld, W.G.K.; Seckelmann, M. Simple Algorithm for Sampling Synchronization of ADCs. IEEE Trans. Instrum. Meas. 2009, 58, 781–785. [Google Scholar] [CrossRef]
- Chugani, M.; Samant, A.; Cerna, M. LabVIEW Signal Processing; Prentice Hall: Upper Saddle River, NJ, USA, 1998; pp. 97–110. [Google Scholar]
- Chen, Y.; Mohns, E.; Badura, H.; Räther, P.; Luiso, M. Setup and Characterisation of Reference Current-to-Voltage Transformers for Wideband Current Transformers Calibration up to 2 Ka. In Proceedings of the 2019 IEEE 10th International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 25–27 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Duda, K.; Barczentewicz, S. Interpolated DFT for Windows. IEEE Trans. Instrum. Meas. 2014, 63, 754–760. [Google Scholar] [CrossRef]
- Dodgson, N.A. Quadratic interpolation for image resampling. IEEE Trans. Instrum. Meas. 1997, 6, 1322–1326. [Google Scholar] [CrossRef] [PubMed]
- Hamila, R.; Gunnarsson, G.; Renfors, M. New design approach for polynomial-based interpolation. In Proceedings of the 1999 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM 1999), Victoria, BC, Canada, 22–24 August 1999; pp. 544–547. [Google Scholar] [CrossRef]
- Handel, P. Properties of the IEEE-STD-1057 four-parameter sine wave fit algorithm. IEEE Trans. Instrum. Meas. 2000, 49, 1189–1193. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W.; Buck, J.R. Zeitdiskrete Signalverarbeitung, 2nd ed.; MunPearson Studium: Munich, Germany, 2004; pp. 206–238. [Google Scholar]
- Sinc Function. Available online: https://en.wikipedia.org/wiki/Sinc_function (accessed on 28 September 2020).
- Whittaker–Shannon Interpolation Formula. Available online: https://en.wikipedia.org/wiki/Whittaker–Shannon_interpolation_formula (accessed on 28 September 2020).
- IEC 61850-9-2:2011 Communication Networks and Systems in Substations–Part 9-2: Specific Communication Service Mapping (SCSM)–Sampled Values over ISO/IEC 8802-3; International Electrotechnical Commission: Geneva, Switzerland, 2011.
- IEC 61869-13:2019 Instrument transformers–Part 13: Standalone Merging Unit; International Standardization Organization: Geneva, Switzerland, 2019.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Rate in Hz | ASDU Per Frame | Publishing Rate Frame/s | Frequency in Hz |
|---|---|---|---|
| 4000 | 1 | 4000 | 50 |
| 4800 | 1 | 4800 | 50/60 |
| 4800 * | 2 | 2400 | 50/60 |
| 5760 | 1 | 5760 | 60 |
| 12,800 | 8 | 1600 | 50 |
| 14,400 * | 6 | 2400 | 50/60 |
| 15,360 | 8 | 1920 | 60 |
| 96,000 * | 1 | 96,000 | wideband |
| U1 in V | Φ1 In Rad | f1 in Hz | UDFT(f1) in V | φDFT(f1) in Rad | (UDFT(f1) − U1)/U1 in % | φDFT(f1) − φ1 in Crad |
|---|---|---|---|---|---|---|
| 1 | 0 | 50.100058 | 9.998 × 10−1 | 1.77 × 10−4 | −0.020 | 0.018 |
| 100 | 0 | 50.100001 | 1.000 × 102 | 1.56 × 10−6 | 0.000 | 0.000 |
| 100,000 | 0 | 50.100000 | 1.000 × 105 | 2.13 × 10−9 | 0.000 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Mohns, E.; Seckelmann, M.; de Rose, S. Precise Amplitude and Phase Determination Using Resampling Algorithms for Calibrating Sampled Value Instruments. Sensors 2020, 20, 7345. https://doi.org/10.3390/s20247345
Chen Y, Mohns E, Seckelmann M, de Rose S. Precise Amplitude and Phase Determination Using Resampling Algorithms for Calibrating Sampled Value Instruments. Sensors. 2020; 20(24):7345. https://doi.org/10.3390/s20247345
Chicago/Turabian StyleChen, Yeying, Enrico Mohns, Michael Seckelmann, and Soeren de Rose. 2020. "Precise Amplitude and Phase Determination Using Resampling Algorithms for Calibrating Sampled Value Instruments" Sensors 20, no. 24: 7345. https://doi.org/10.3390/s20247345