Laser and LIDAR in a System for Visibility Distance Estimation in Fog Conditions

Abstract
:1. Introduction
2. Related Work
- (i)
- Direct transmission measurements, which consists in measuring the optical power of a light beam after passing a fog layer.
- (ii)
- Backscattering measurements consist of measuring the reflected/scattered light from a fog layer.
3. Methods and Materials
3.1. Rayleigh Scattering
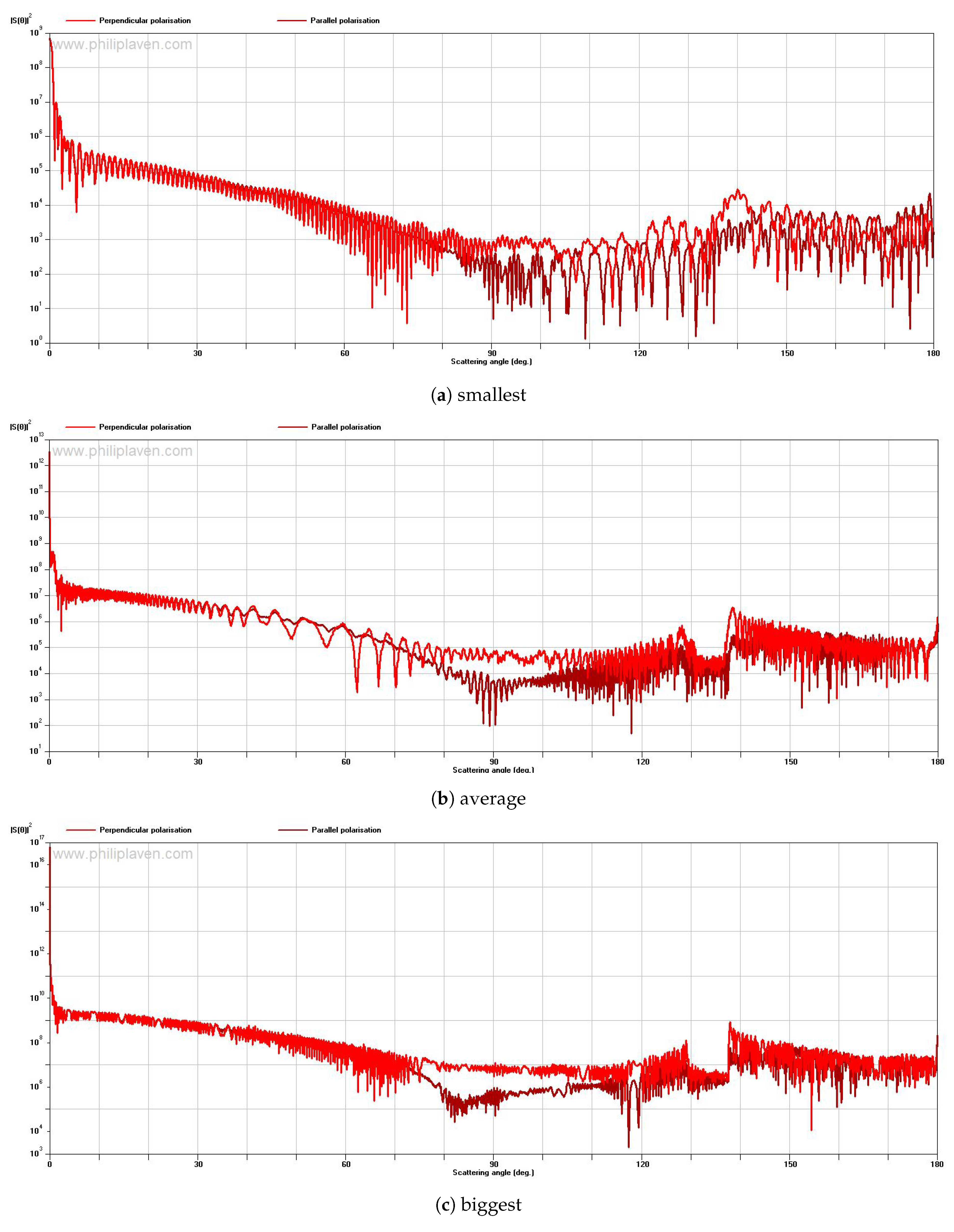
3.2. Mie Scattering
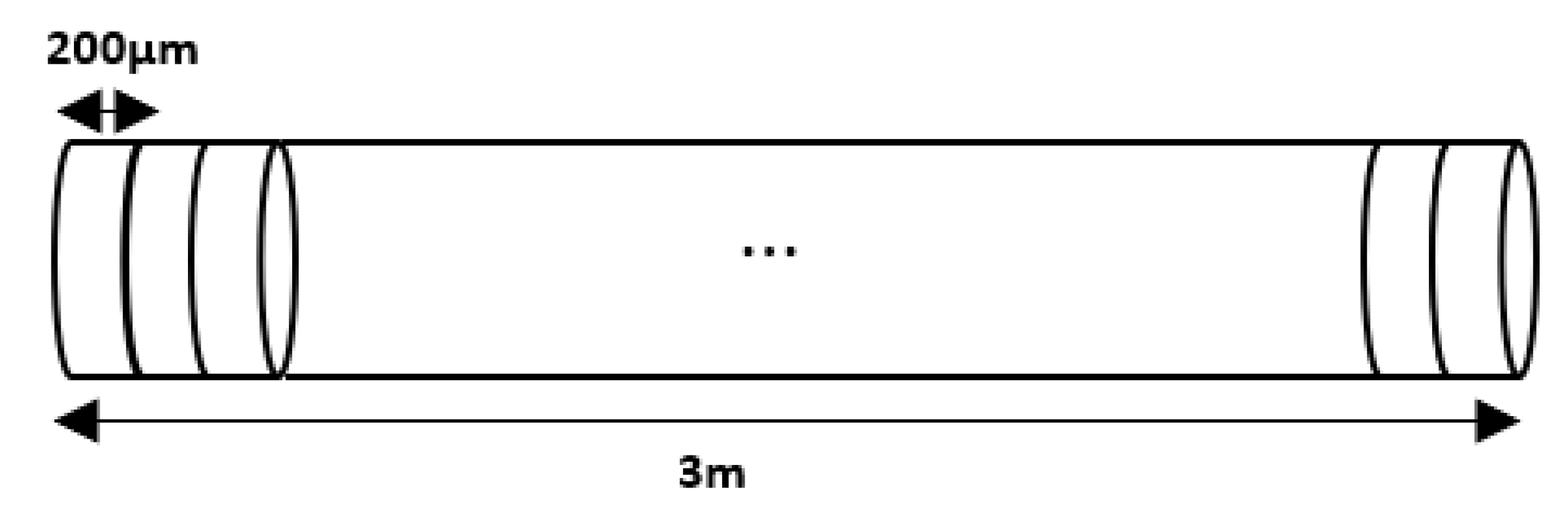
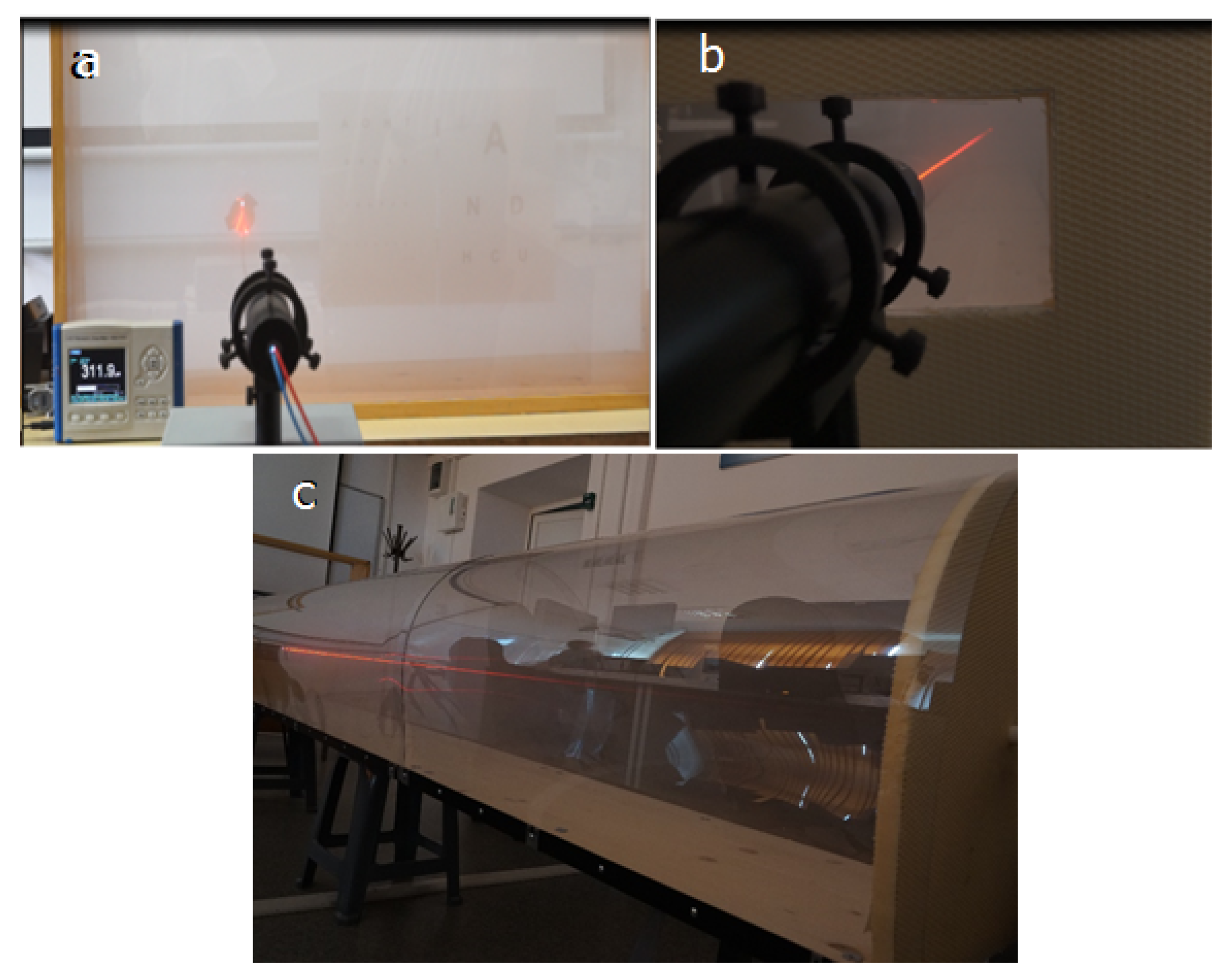
3.3. Setup Used
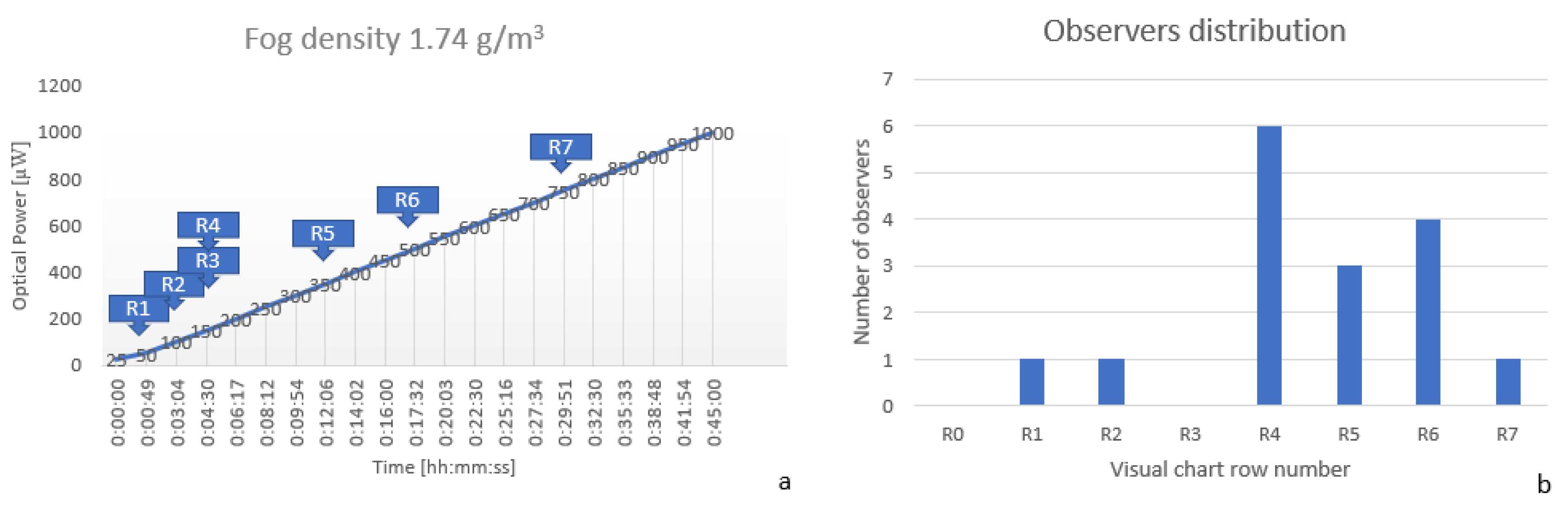
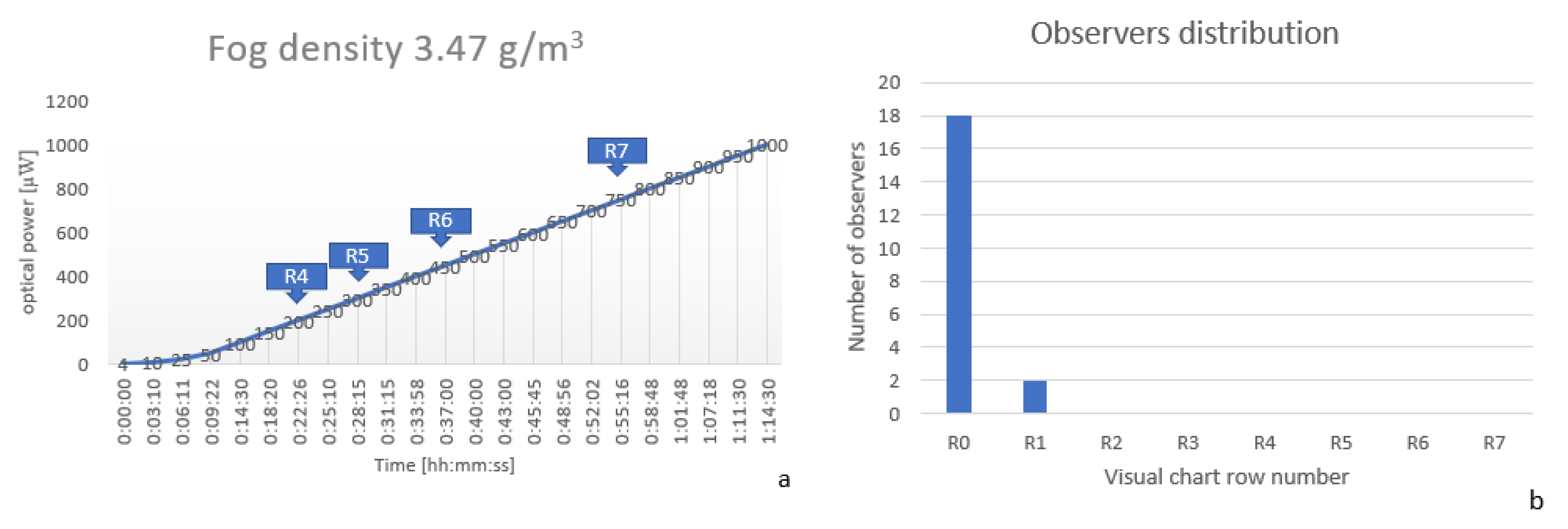
3.4. Measurement Methodology
4. Experiments and Results
4.1. The Influence of Fog Particles Size
4.2. Visual Acuity—Measurement Systems vs. Observers
4.3. Lidar and Telemeter Measurements
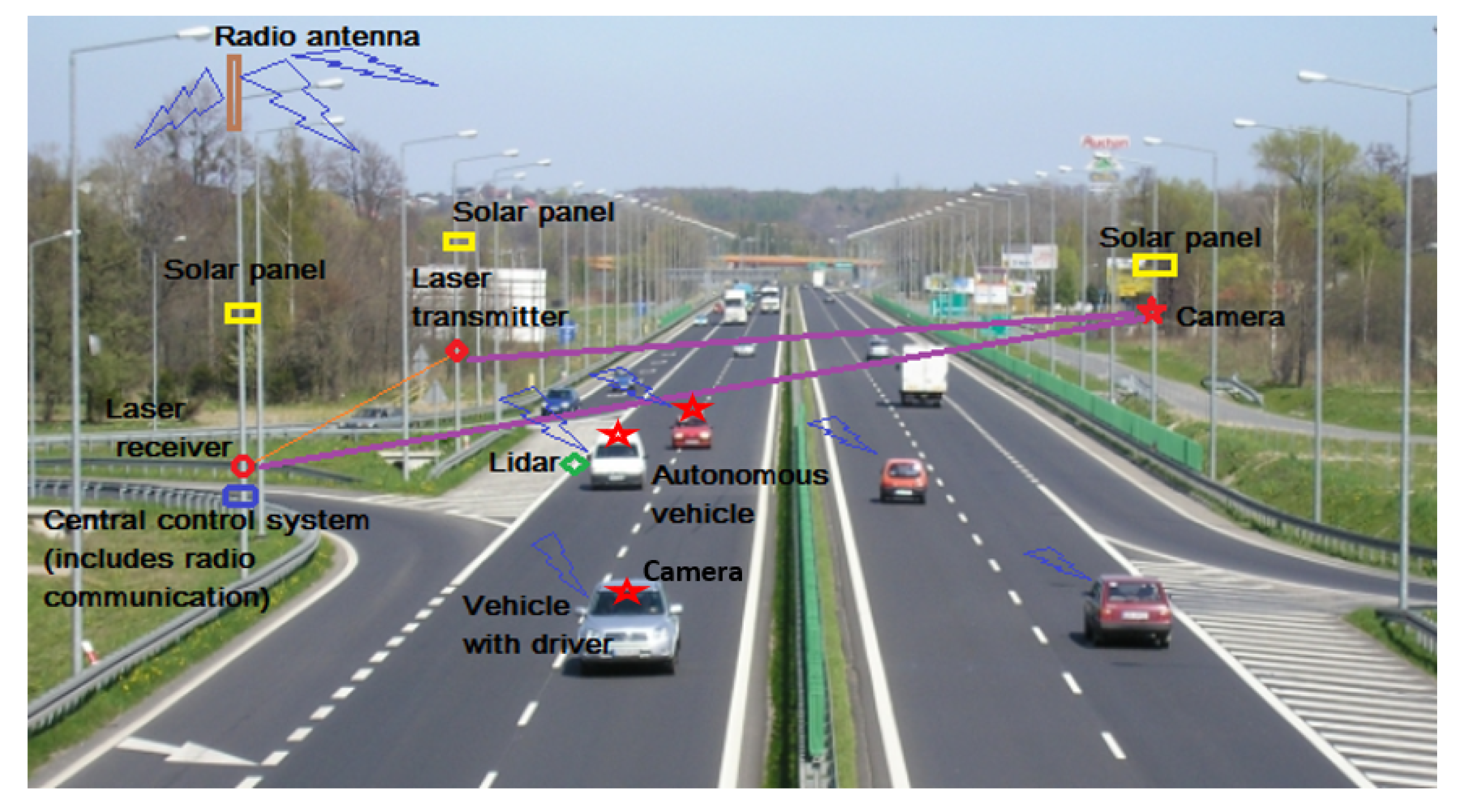
4.4. Safety System for Visibility Distance Estimation
5. Discussion and Conclusions
- We managed to realize a laboratory setup where we succeeded to test different fog detection (and visibility estimation) methods in similar and repeatable conditions;
- We presented the fog effect on direct transmission and on backscattering;
- We presented a way in which a visibility distance can be estimated from an optical power measurement (link between the loss of optical power in different fog conditions and the visual acuity of human observers);
- -
- The dimension of a road sign is 70 cm, so at an attenuation of around 75% of the input optical power (measured after passing the fog cloud), it is visible from a distance of around 50 m (considering the biggest optotype in the determination) while from a distance of around 10 m, the smallest details are noticeable (when considering the fifth row of optotypes).
- -
- A pedestrian of 1.7 m high, in the same fog conditions described above, is visible from a distance of around 115 m, the smallest details being distinguishable from around 23 m. Based on this distance (estimated using optical power measurements and applying some mathematical algorithms) and when considering the vehicle type can be recommended a safety travel speed, using the following relationship [31]:
- Using the experimental set up described in our work, the methods that are based on image processing can also be tested in real time and under repeatable conditions.
Author Contributions
Funding
Conflicts of Interest
References
- Middleton, W.E.K. Vision through the Atmosphere; University of Toronto Press: Toronto, ON, Canada, 1952. [Google Scholar]
- McCartney, E.J. Optics of the Atmosphere: Scattering by Molecules and Particles; NYJW: New York, NY, USA, 1976. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Vision and the atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Technical Report; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2015. [Google Scholar]
- Edelstein, S. Waymo Self-Driving Cars Are Getting Confused by Rain, Passenger Says—The Drive. 2019. Available online: https://www.thedrive.com/tech/26083/waymo-self-driving-cars-are-getting-confused-by-rain-passenger-says (accessed on 27 August 2020).
- Guardian, T. Tesla Driver Dies in First Fatal Crash While Using Autopilot Mode|Technology|The Guardian. 2016. Available online: https://www.theguardian.com/technology/2016/jun/30/tesla-autopilot-death-self-driving-car-elon-musk (accessed on 27 August 2020).
- Maddox, T. How Autonomous Vehicles Could Save Over 350K Lives in the US and Millions Worldwide|ZDNet. 2018. Available online: https://www.zdnet.com/article/how-autonomous-vehicles-could-save-over-350k-lives-in-the-us-and-millions-worldwide/ (accessed on 27 August 2020).
- Trends in Automotive Lighting|OSRAM Automotive. Available online: https://www.osram.com/am/specials/trends-in-automotive-lighting/index.jsp (accessed on 27 August 2020).
- US to Allow Brighter, Self-Dimming Headlights on New Cars. 2018. Available online: https://www.thecarconnection.com/news/1119327_u-s-to-allow-brighter-self-dimming-headlights-on-new-cars (accessed on 27 August 2020).
- Li, Y.; Hoogeboom, P.; Russchenberg, H. Radar observations and modeling of fog at 35 GHz. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 1053–1057. [Google Scholar]
- Pérez-Díaz, J.L.; Ivanov, O.; Peshev, Z.; Álvarez-Valenzuela, M.A.; Valiente-Blanco, I.; Evgenieva, T.; Dreischuh, T.; Gueorguiev, O.; Todorov, P.V.; Vaseashta, A. Fogs: Physical basis, characteristic properties, and impacts on the environment and human health. Water 2017, 9, 807. [Google Scholar] [CrossRef] [Green Version]
- Koschmieder, H. Theorie der horizontalen Sichtweite. In Beitrage zur Physik der Freien Atmosphare; VS Verlag für Sozialwissenschaften: Wiesbaden, Germany, 1924; pp. 33–53. [Google Scholar]
- Senthilkumar, K.; Sivakumar, P. A Review on Haze Removal Techniques. In Computer Aided Intervention and Diagnostics in Clinical and Medical Images; Springer: Berlin, Germany, 2019; pp. 113–123. [Google Scholar]
- Ioan, S.; Razvan-Catalin, M.; Florin, A. System for visibility distance estimation in fog conditions based on light sources and visual acuity. In Proceedings of the 2016 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 19–21 May 2016; pp. 1–6. [Google Scholar]
- Pesek, J.; Fiser, O. Automatically low clouds or fog detection, based on two visibility meters and FSO. In Proceedings of the 2013 Conference on Microwave Techniques (COMITE), Pardubice, Czech Republic, 17–18 April 2013; pp. 83–85. [Google Scholar]
- Brazda, V.; Fiser, O.; Rejfek, L. Development of system for measuring visibility along the free space optical link using digital camera. In Proceedings of the 2014 24th International Conference Radioelektronika, Pardubice, Czech Republic, 17–18 April 2014; pp. 1–4. [Google Scholar]
- Brazda, V.; Fiser, O. Estimation of fog drop size distribution based on meteorological measurement. In Proceedings of the 2015 Conference on Microwave Techniques (COMITE), Pardubice, Czech Republic, 22–23 April 2015; pp. 1–4. [Google Scholar]
- Gruyer, D.; Cord, A.; Belaroussi, R. Vehicle detection and tracking by collaborative fusion between laser scanner and camera. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5207–5214. [Google Scholar]
- Dannheim, C.; Icking, C.; Mäder, M.; Sallis, P. Weather detection in vehicles by means of camera and LIDAR systems. In Proceedings of the 2014 Sixth International Conference on Computational Intelligence, Communication Systems and Networks, Tetova, Macedonia, 27–29 May 2014; pp. 186–191. [Google Scholar]
- Sallis, P.; Dannheim, C.; Icking, C.; Maeder, M. Air pollution and fog detection through vehicular sensors. In Proceedings of the 2014 8th Asia Modelling Symposium, Taipei, Taiwan, 23–25 September 2014; pp. 181–186. [Google Scholar]
- Ovsenik, L.; Turan, J.; Misencik, P.; Bito, J.; Csurgai-Horvath, L. Fog density measuring system. Acta Electrotech. Inform. 2012, 12, 67. [Google Scholar] [CrossRef]
- Alami, S.; Ezzine, A.; Elhassouni, F. Local fog detection based on saturation and RGB-correlation. In Proceedings of the 2016 13th International Conference on Computer Graphics, Imaging and Visualization (CGiV), Beni Mellal, Morocco, 29 March–1 April 2016; pp. 1–5. [Google Scholar]
- Pavlić, M.; Belzner, H.; Rigoll, G.; Ilić, S. Image based fog detection in vehicles. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 1132–1137. [Google Scholar]
- Spinneker, R.; Koch, C.; Park, S.B.; Yoon, J.J. Fast fog detection for camera based advanced driver assistance systems. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1369–1374. [Google Scholar]
- Zhang, D.; Sullivan, T.; O’Connor, N.E.; Gillespie, R.; Regan, F. Coastal fog detection using visual sensing. In Proceedings of the OCEANS 2015-Genova, Genoa, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar]
- Xian, J.; Sun, D.; Amoruso, S.; Xu, W.; Wang, X. Parameter optimization of a visibility LiDAR for sea-fog early warnings. Opt. Express 2020, 28, 23829–23845. [Google Scholar] [CrossRef]
- Piazza, R.; Degiorgio, V. Scattering, Rayleigh. 2005. Available online: https://www.sciencedirect.com/topics/chemistry/rayleigh-scattering (accessed on 27 August 2020).
- Surjikov, S. Mie Scattering. 2011. Available online: http://www.thermopedia.com/content/956/ (accessed on 27 August 2020).
- Yu, H.; Shen, J.; Wei, Y. Geometrical optics approximation for light scattering by absorbing spherical particles. J. Quant. Spectrosc. Radiat. Transf. 2009, 110, 1178–1189. [Google Scholar] [CrossRef]
- Varhelyi, A. Dynamic speed adaptation in adverse conditions: A system proposal. IATSS Res. 2002, 26, 52–59. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Distance | Measurement Time | Liquid Quantity [g] | Fog Density [g/m] | Optical Power [uW] | Visual Acuity System | Visual Acuity Human |
|---|---|---|---|---|---|---|
| 3 m | 60 s | 0 | - | 1400 | R7 | R7 |
| 0.5 | 0.87 | 420 | R5 | R5/R4 | ||
| 1 | 1.74 | 60 | R2 | R4 | ||
| 1.5 | 2.6 | noise | - | R2 | ||
| 2 | 3.47 | noise | - | - |
| Generated Fog Density [g/m] | Fog Particles Mass in Laser Beam [g] | Time Elapsed, t [min:sec] | Visual Acuity | Total Attenuation Coefficient, | Attenuation Coefficient/Slice, | Extrapolate Attenuation to a Specific Distance, d | Extrapolate Visual Acuity to a Specific Distance, d |
|---|---|---|---|---|---|---|---|
| 0.87 | 2048 × | 0:50 | 0.418 × | 0.277 × | |||
| 1.74 | 4097 × | 12:06 | R5 | 0.462 × | 0.306 × | d = | d = 13.75 |
| 2.6 | 6132 × | 23:10 | 0.513 × | 0.340 × | × (d/d) | × object dim | |
| 3.47 | 8171 × | 25:15 | 0.513 × | 0.340 × |
| Measurement Distance [m] | Liquid Quantity [g] | Fog Density [g/m] | Lidar Results [m] | Telemeter Results [m] |
|---|---|---|---|---|
| 3 | 0 | - | 3 | 3 |
| 3 | 0.5 | 0.87 | 2.86 | 3 |
| 3 | 1 | 1.74 | 1.27 | 3 |
| 3 | 1.5 | 2.6 | 0.86 | Error |
| 3 | 2 | 3.47 | 0.64 | Error |
| Measurement Distance | Visual Acuity | Optical Power [uW] | Liquid Quantity [g] | Fog Density [g/m] |
|---|---|---|---|---|
| 3 m Fog layer thickness = 30 cm | 0 | 57 | 2 | 11.11 |
| 1 | 120 | 1.75 | 9.72 | |
| 2 | 140 | 1.5 | 8.34 | |
| 3 | 220 | 1.25 | 6.95 | |
| 4 | 280 | 1 | 5.56 | |
| 5 | 340 | 0.75 | 4.17 | |
| 6 | 550 | 0.5 | 2.78 | |
| 7 | 950 | 0.25 | 1.39 |
| Measurement Distance | Visual Acuity | Optical Power [uW] | Liquid Quantity [g] | Fog Density [g/m] |
|---|---|---|---|---|
| 3 m Fog layer thickness = 30 cm | 0 | 57 | 2 | 3.47 |
| 1 | 120 | 1.75 | 3.05 | |
| 2 | 140 | 1.5 | 2.60 | |
| 3 | 220 | 1.25 | 2.14 | |
| 4 | 280 | 1 | 1.74 | |
| 5 | 340 | 0.75 | 1.31 | |
| 6 | 550 | 0.5 | 0.87 | |
| 7 | 900 | 0.25 | 0.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miclea, R.-C.; Dughir, C.; Alexa, F.; Sandru, F.; Silea, I. Laser and LIDAR in a System for Visibility Distance Estimation in Fog Conditions. Sensors 2020, 20, 6322. https://doi.org/10.3390/s20216322
Miclea R-C, Dughir C, Alexa F, Sandru F, Silea I. Laser and LIDAR in a System for Visibility Distance Estimation in Fog Conditions. Sensors. 2020; 20(21):6322. https://doi.org/10.3390/s20216322
Chicago/Turabian StyleMiclea, Razvan-Catalin, Ciprian Dughir, Florin Alexa, Florin Sandru, and Ioan Silea. 2020. "Laser and LIDAR in a System for Visibility Distance Estimation in Fog Conditions" Sensors 20, no. 21: 6322. https://doi.org/10.3390/s20216322