Conductance-Based Interface Detection for Multi-Phase Pipe Flow


Abstract
:1. Introduction
2. Sensor Architecture and Theory
2.1. Design of the Conductive Sensor
2.2. Theory
3. Methodology
3.1. Parameters for Physical Experiments and Parallel Simulations
3.2. Experiment Setup
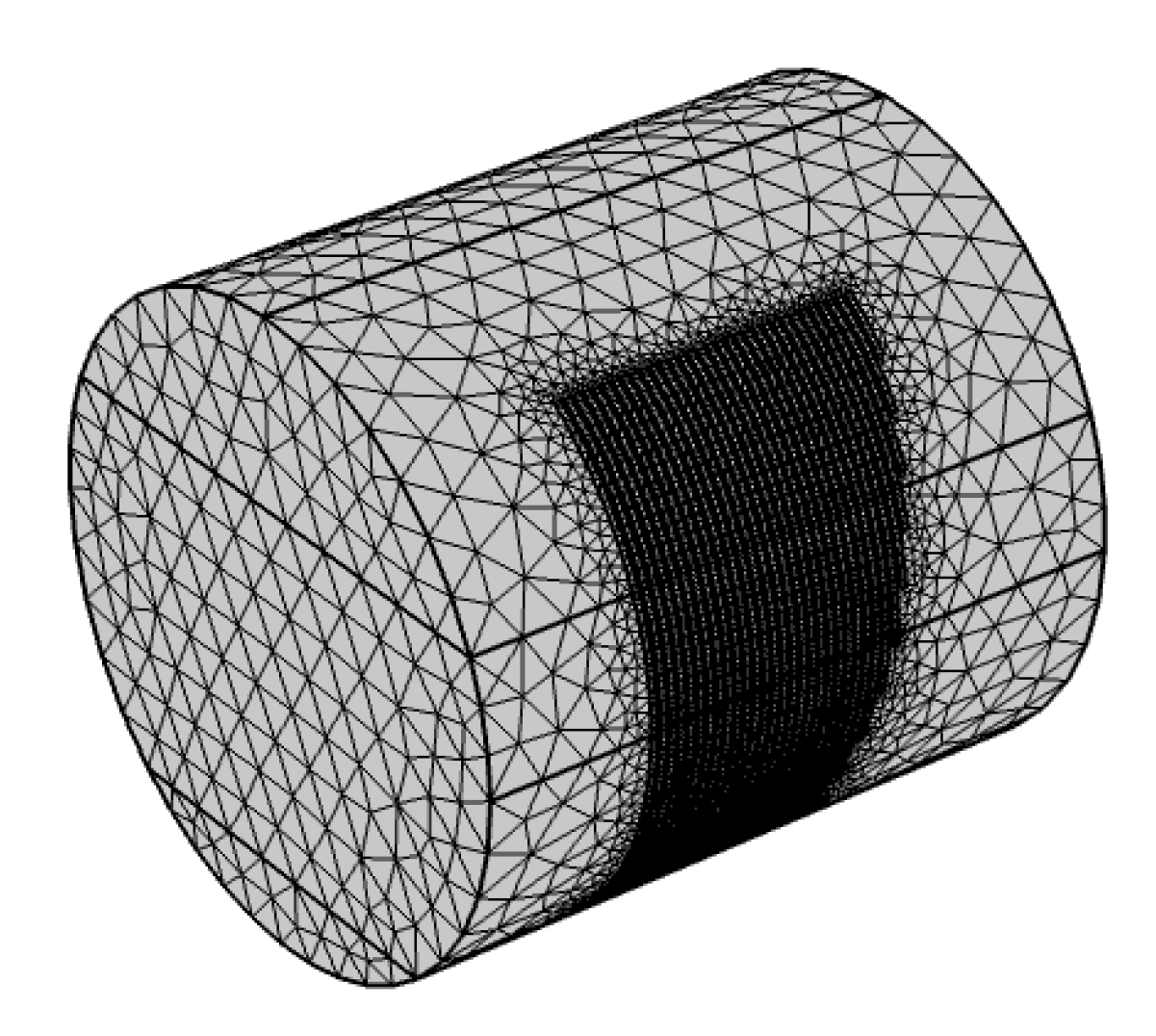
3.3. FEA Model of the Sensor
4. Results and Discussion
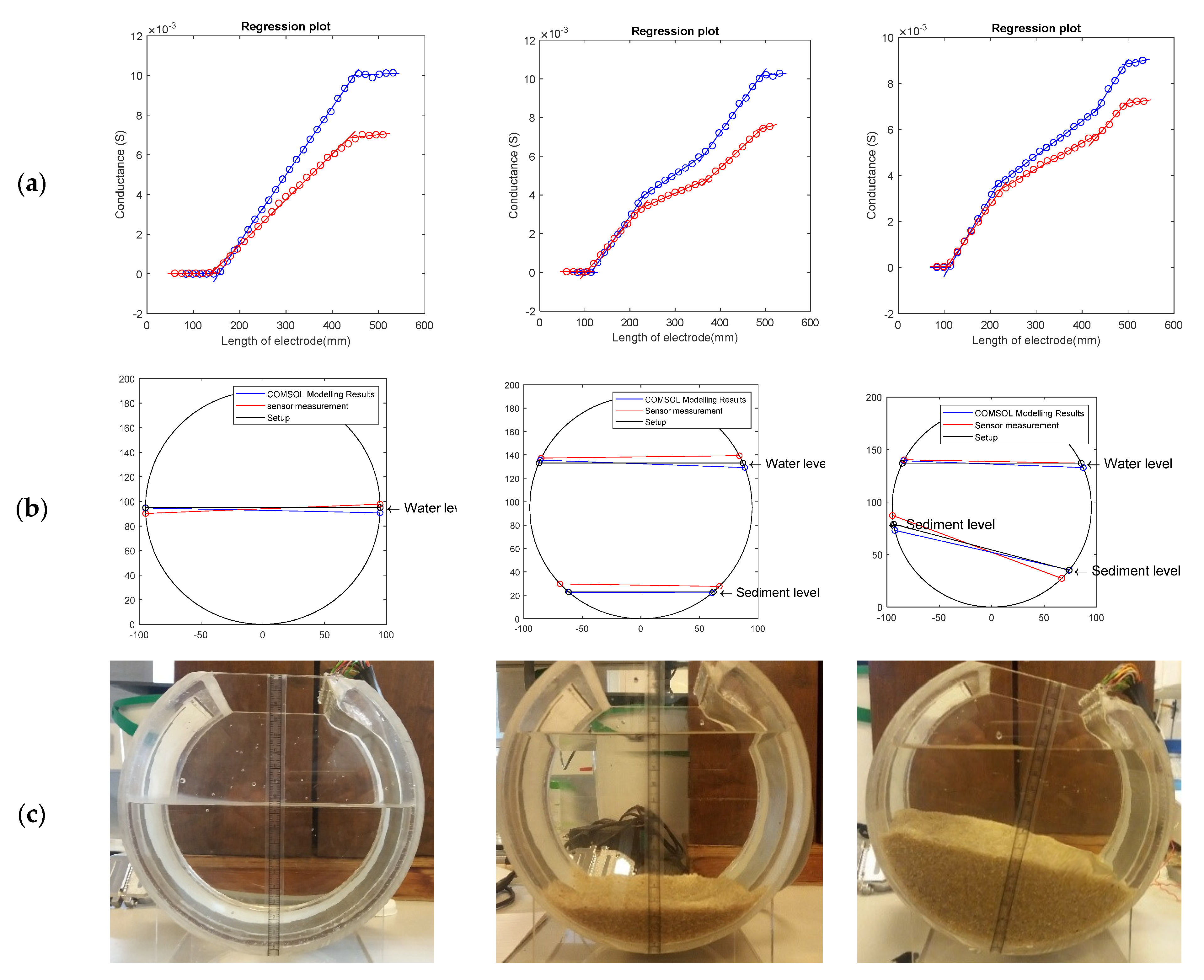
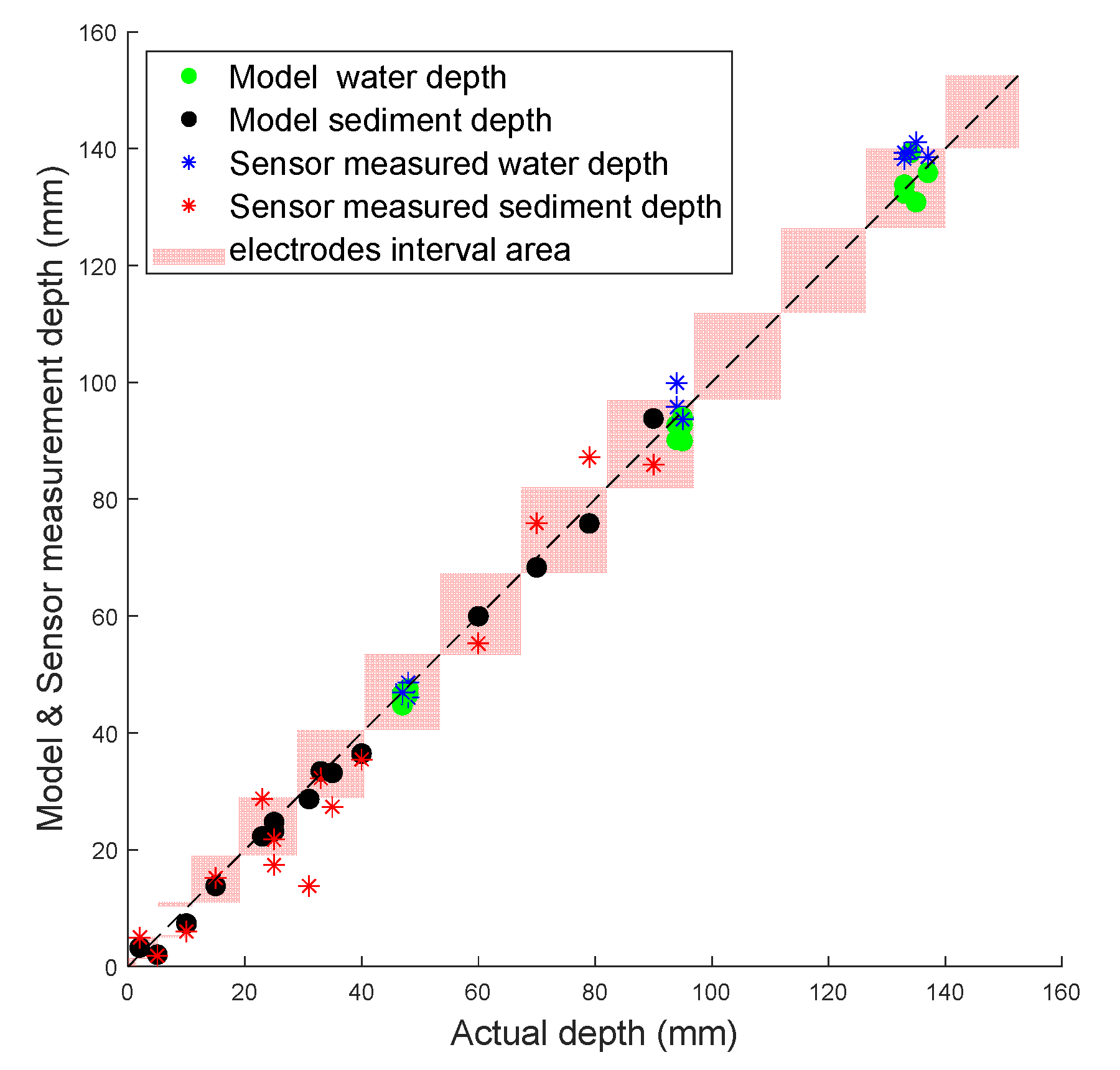
4.1. Depth Measurement Results
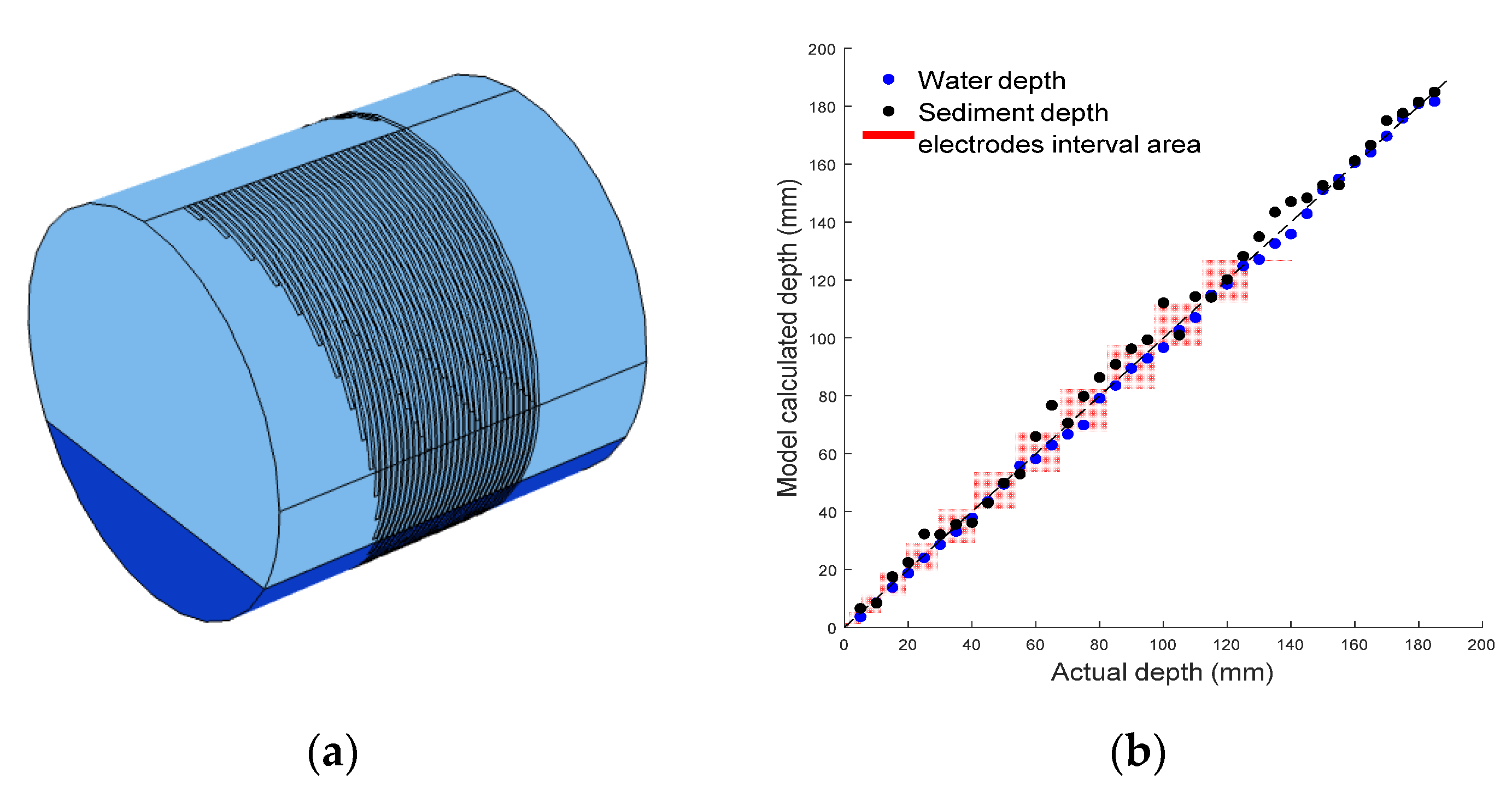
4.2. Sensor’s Resolution Analysis
4.3. Slope and Electrical Conductivity
4.4. Limitation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Celestini, R.; Silvagni, G.; Spizzirri, M.; Volpi, F. Sediment Transport in Sewers; WIT Transactions on Ecology and the Environment: Southampton, UK, 2007; Volume 103, pp. 273–282. ISBN 9781845640743. [Google Scholar]
- Jiang, G.; Sun, J.; Sharma, K.R.; Yuan, Z. Corrosion and odor management in sewer systems. Curr. Opin. Biotechnol. 2015, 33, 192–197. [Google Scholar] [CrossRef] [PubMed]
- Ashley, R.; Hvitved Jacobsen, T. Management of Sewer Sediments. In Wet-Weather Flow in the Urban Watershed; Lewis Publishing: Boca Raton, FL, USA, 2003; pp. 187–223. ISBN 1566769167. [Google Scholar]
- Riochet, B. Sedimentation in Large Combined Sewage Systems: Perspectives of an Operator/La Sédimentation dans les Réseaux Unitaires Visitables: Le Point de Vue d’un Exploitant. In Proceedings of the International Meeting on Measurements and Hydraulics of Sewers IMMHS’08, Summer School GEMCEA/LCPC, Bouguenais, France, 19–21 August 2008. [Google Scholar]
- Ashley, R.; Bertrand-Krajewski, J.; Hvitved-Jacobsen, T.; Verbanck, M. Solids in Sewers: Characteristics, Effects and Control of Sewer Solids and Associated Pollutants. Water Intell. Online 2015, 4, 9781780402727. [Google Scholar] [CrossRef]
- Shirazi, R.H.; Bouteligier, J.R. Berlamont Evaluation of sediment removal efficiency of flushing devices regarding sewer system characteristics. In Proceedings of the ICHE 2008, Nagoya, Japan, 8–12 September 2008. [Google Scholar]
- Lorenzen, A.; Willms, M.A.; Dinkelacker, A. The göttingen boat. Water Sci. Technol. 1992, 25, 57–62. [Google Scholar] [CrossRef]
- Lepot, M.; Pouzol, T.; Aldea Borruel, X.; Suner, D.; Bertrand-Krajewski, J.-L. Measurement of sewer sediments with acoustic technology: From laboratory to field experiments. Urban Water J. 2016, 14, 369–377. [Google Scholar] [CrossRef] [Green Version]
- Carnacina, I.; Larrarte, F. Coupling acoustic devices for monitoring combined sewer network sediment deposits. Water Sci. Technol. 2014, 69, 1653–1660. [Google Scholar] [CrossRef]
- Bertrand Krajewski, J.; Gibello, C. A New Technique to Measure Crosssection and Longitudinal Sediment Profiles in Sewers. In Proceedings of the 11th ICUD—International Conference on Urban Drainage, Edinburgh, UK, 31 August–5 September 2008. [Google Scholar]
- Web Exclusive: Measuring Level Interfaces—ISA. Available online: https://ww2.isa.org/standards-and-publications/isa-publications/intech-magazine/2012/april/web-exclusive-measuring-level-interfaces/ (accessed on 6 September 2020).
- Wang, C.; Jiang, H. Real-time monitoring of sediment bulking through a multi-anode sediment microbial fuel cell as reliable biosensor. Sci. Total Environ. 2019, 697, 134009. [Google Scholar] [CrossRef]
- Ridd, P.V. A sediment level sensor for erosion and siltation detection. Estuar. Coast. Shelf Sci. 1992, 35, 353–362. [Google Scholar] [CrossRef]
- De Rooij, F.; Dalziel, S.B.; Linden, P.F. Electrical measurement of sediment layer thickness under suspension flows. Exp. Fluids 1999, 26, 470–474. [Google Scholar] [CrossRef]
- Jansen, E.; Blum, P.; Shipboard Scientific Party. Carbonates and Bulk Sediment Geochemistry of ODP Hole 162-986D; PANGAEA: Bremerhaven, Germany, 2005. [Google Scholar]
- Li, X.; Lei, T.; Wang, W.; Xu, Q.; Zhao, J. Capacitance sensors for measuring suspended sediment concentration. CATENA 2005, 60, 227–237. [Google Scholar] [CrossRef]
- Tollefsen, J.; Hammer, E.A. Capacitance sensor design for reducing errors in phase concentration measurements. Flow Meas. Instrum. 1998, 9, 25–32. [Google Scholar] [CrossRef]
- Schlaberg, H.I.; Baas, J.H.; Wang, M.; Best, J.L.; Williams, R.A.; Peakall, J. Electrical Resistance Tomography for Suspended Sediment Measurements in Open Channel Flows Using a Novel Sensor Design. Part. Particle Syst. Charact. 2006, 23, 313–320. [Google Scholar] [CrossRef]
- Wang, H.; Yang, W. Application of electrical capacitance tomography in circulating fluidised beds—A review. Appl. Therm. Eng. 2020, 176, 115311. [Google Scholar] [CrossRef]
- Deabes, W.; Sheta, A.; Bouazza, K.E.; Abdelrahman, M. Application of Electrical Capacitance Tomography for Imaging Conductive Materials in Industrial Processes. J. Sens. 2019, 2019, 1–22. [Google Scholar] [CrossRef]
- Goncharsky, A.V.; Romanov, S.; Seryozhnikov, S.Y. Supercomputer technologies in tomographic imaging applications. Supercomput. Front. Innov. 2016, 3, 41–66. [Google Scholar]
- Sophocleous, M.; Atkinson, J.K. A novel thick-film electrical conductivity sensor suitable for liquid and soil conductivity measurements. Sens. Actuators B Chem. 2015, 213, 417–422. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wang, X.; Zhao, Q.; Zhang, Y.; Zhou, Q. In Situ Representation of Soil/Sediment Conductivity Using Electrochemical Impedance Spectroscopy. Sensors 2016, 16, 625. [Google Scholar] [CrossRef] [Green Version]
- Nichols, A. Device and Method for Measuring the Depth of Media; PCT WO-2014027208-A3; University of Bradford: Sheffield, UK, 2014. [Google Scholar]
- Chetpattananondh, K.; Tapoanoi, T.; Phukpattaranont, P.; Jindapetch, N. A self-calibration water level measurement using an interdigital capacitive sensor. Sens. Actuators A Phys. 2014, 209, 175–182. [Google Scholar] [CrossRef]
- Bai, W.; Kong, L.; Guo, A. Effects of physical properties on electrical conductivity of compacted lateritic soil. J. Rock Mech. Geotech. Eng. 2013, 5, 406–411. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.-R.; Tzeng, G.-H.; Li, H.-L. General fuzzy piecewise regression analysis with automatic change-point detection. Fuzzy Sets Syst. 2001, 119, 247–257. [Google Scholar] [CrossRef]
- Yang, L.; Liu, S.; Tsoka, S.; Papageorgiou, L.G. Mathematical programming for piecewise linear regression analysis. Expert Syst. Appl. 2016, 44, 156–167. [Google Scholar] [CrossRef] [Green Version]
- Building Regulations. Approved document H: Drainage and Waste Disposal (2015 Edition). HM Government, 2010. Available online: https://www.gov.uk/government/uploads/system/uploads/attachment_data/file/442889/BR_PDF_AD_H_2015.pdf (accessed on 9 September 2020).
- DB Group (Holdings) Ltd. Available online: https://dbgholdings.com/ (accessed on 9 September 2020).
- Gabreil, E.; Tait, S.J.; Shao, S.; Nichols, A. SPHysics simulation of laboratory shallow free surface turbulent flows over a rough bed. J. Hydraul. Res. 2018, 56, 727–747. [Google Scholar] [CrossRef] [Green Version]
- Horoshenkov, K.V.; Nichols, A.; Tait, S.J.; Maximov, G.A. The pattern of surface waves in a shallow free surface flow. J. Geophys. Res. Earth Surf. 2013, 118, 1864–1876. [Google Scholar] [CrossRef]
- Horoshenkov, K.V.; Van Renterghem, T.; Nichols, A.; Krynkin, A. Finite difference time domain modelling of sound scattering by the dynamically rough surface of a turbulent open channel flow. Appl. Acoust. 2016, 110, 13–22. [Google Scholar] [CrossRef] [Green Version]
- Nichols, A. Free Surface Dynamics in Shallow Turbulent Flows. Ph.D. Thesis, University of Bradford, West Yorkshire, UK, 2015. [Google Scholar]
- Nichols, A.; Rubinato, M. Lowcost. Remote sensing of environmental processes via low-cost 3D free-surface mapping. In Proceedings of the 4th IHAR Europe Congress, Liege, Belgium, 27–29 July 2016; pp. 186–192, ISBN 9781138029774. [Google Scholar]
- Nichols, A.; Tait, S.J.; Horoshenkov, K.V.; Shepherd, S.J. A model of the free surface dynamics of shallow turbulent flows. J. Hydraul. Res. 2016, 54, 516–526. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Code | Water Depth (mm) | Sediment Depth (mm) | Rotation Angle (Degrees) |
|---|---|---|---|
| W1 | 134 | - | - |
| W2 | 95 | - | - |
| W3 | 47 | - | - |
| S1 | 133 | 23 | 0 |
| S2 | 135 | 60 | 0 |
| S3 | 133 | 90 | 0 |
| S4 | 94 | 70 | 0 |
| S5 | 94 | 40 | 0 |
| S6 | 95 | 25 | 0 |
| S7 | 48 | 25 | 0 |
| S8 | 47 | 10 | 0 |
| S9 | 48 | 5 | 0 |
| SA1 | 137 | 56 | 15 |
| SA2 | 95 | 13 | 28 |
| SA3 | 47 | 23 | 8 |
| SA4 | 85 | 75 | 38 |
| Material | Electrical Conductivity (S/m) | Relative Permittivity |
|---|---|---|
| Copper | 5.87 × 107 | − |
| Water | 0.0284 | 81 |
| Saturated sand (sediment) | 0.0129 | 15.84 |
| Air | 1 × 10−20 | 1 |
| Test Code | Water Depth (mm) | Sediment Depth (mm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Actual | COMSOL Modelling | Model Error | Sensor Measured | Measured Error | Actual | COMSOL Modelling | Model Error | Sensor Measured | Measured Error | |
| W1 | 134 | 139.26 | 5.26 | 139.35 | 5.35 | − | − | − | ||
| W2 | 95 | 92.75 | −2.25 | 93.99 | −1.01 | − | − | − | ||
| W3 | 47 | 44.71 | −2.29 | 46.99 | −0.01 | − | − | − | ||
| S1 | 133 | 132.33 | −0.67 | 138.28 | 5.28 | 23 | 22.34 | −0.66 | 28.72 | 5.72 |
| S2 | 135 | 130.97 | −4.03 | 141.07 | 6.07 | 60 | 59.83 | −0.17 | 55.31 | −4.69 |
| S3 | 133 | 133.58 | 0.58 | 139.28 | 6.28 | 90 | 93.02 | 3.02 | 85.89 | −4.11 |
| S4 | 94 | 92.67 | −1.33 | 99.90 | 5.9 | 70 | 68.73 | −1.27 | 75.92 | 5.92 |
| S5 | 94 | 89.64 | −4.36 | 95.77 | 1.77 | 40 | 36.27 | −3.73 | 35.45 | −4.55 |
| S6 | 95 | 89.56 | −5.44 | 93.91 | −1.09 | 25 | 23.05 | −1.95 | 17.37 | −7.63 |
| S7 | 48 | 47.63 | −0.37 | 48.61 | 0.61 | 25 | 24.82 | −0.18 | 21.74 | −3.26 |
| S8 | 47 | 45.96 | −1.04 | 47.24 | 0.24 | 10 | 8.72 | −1.28 | 5.99 | −4.01 |
| S9 | 48 | 46.50 | −1.5 | 46.04 | −1.96 | 5 | 1.95 | −3.05 | 1.84 | −3.16 |
| Test Code | Water Depth (mm) | ||||
|---|---|---|---|---|---|
| Actual | COMSOL Modelling | Model Error | Sensor Measured | Measured Error | |
| SA1 | 137 | 136.04 | −0.96 | 138.59 | 1.59 |
| SA2 | 95 | 93.91 | −1.09 | 93.63 | −1.37 |
| SA3 | 47 | 46.64 | −0.36 | 46.55 | −0.45 |
| Test Code | Sediment Depth (Left) (mm) | ||||
| Actual | COMSOL Modelling | Model Error | Sensor Measured | Measured Error | |
| SA1 | 79.00 | 73.07 | −5.93 | 87.16 | 8.16 |
| SA2 | 2.00 | 3.04 | 1.04 | 0.22 | −1.78 |
| SA3 | 33.00 | 33.74 | 0.74 | 36.34 | 3.34 |
| Test Code | Sediment Depth (Right) (mm) | ||||
| Actual | COMSOL Modelling | Model Error | Sensor Measured | Measured Error | |
| SA1 | 35.33 | 0.33 | 27.35 | −7.65 | 35.33 |
| SA2 | 28.71 | −2.29 | 29.01 | −1.99 | 28.71 |
| SA3 | 13.71 | −1.29 | 12.43 | −2.57 | 13.71 |
| Actual Conductivity | Model Conductivity | Sensor Measured Conductivity | Actual: Model | Actual: Sensor Measured | |
|---|---|---|---|---|---|
| Air | 0 | 0.4 | 0.8 | − | − |
| Water | 28 | 33 | 23 | 1:1.18 | 1:0.82 |
| Sediment | 13 | 15 | 9.5 | 1:1.15 | 1:0.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Corredor Garcia, J.L.; Davidson, J.; Nichols, A. Conductance-Based Interface Detection for Multi-Phase Pipe Flow. Sensors 2020, 20, 5854. https://doi.org/10.3390/s20205854
Wang S, Corredor Garcia JL, Davidson J, Nichols A. Conductance-Based Interface Detection for Multi-Phase Pipe Flow. Sensors. 2020; 20(20):5854. https://doi.org/10.3390/s20205854
Chicago/Turabian StyleWang, Shiyao, Jesus Leonardo Corredor Garcia, Jonathan Davidson, and Andrew Nichols. 2020. "Conductance-Based Interface Detection for Multi-Phase Pipe Flow" Sensors 20, no. 20: 5854. https://doi.org/10.3390/s20205854