1. Introduction
Accurate and reliable navigation information is a fundamental basis of many vehicular applications such as autonomous driving, location based services, and traffic management. With global coverage, all-weather capability, and good long-term accuracy, Global Navigation Satellite Systems (GNSS), such as the U.S. Global Positioning System (GPS), the Chinese BeiDou navigation satellite system (BDS), Russian GLObal NAvigation Satellite System (GLONASS), and European Galileo, are widely utilized in current vehicle navigation systems. However, using GNSS alone has certain limitations. First, the satellite visibility is completely or partially obscured in degraded environments such as urban canyons, tunnels, and buildings. Second, the GNSS signal is vulnerable to interference such as spoofing and jamming [
1]. Last, GNSS cannot provide full vehicle states including position, velocity, attitude, and angular rate, which are needed in the control systems [
2]. It is therefore necessary to introduce augmented sensors to enhance the overall performance.
Owing to its autonomy, high update rate and considerable short-term accuracy, Inertial Navigation System (INS) is a mutually complementary mate for GNSS [
3]. GNSS/INS integration can achieve more accurate and robust navigation than either stand-alone system. Especially, the great advances in low-cost GNSS receivers and Micro-Electro-Mechanical Systems (MEMS) have dramatically reduced the hardware cost for GNSS/INS integration, making it popular in vehicular navigation. At present, loose coupling (LC) and tight coupling (TC) are two well-developed integration strategies [
4]. LC fuses GNSS-derived position and velocity with INS. LC is simple in implementation and requires the least amount of GNSS knowledge. The disadvantages are that the computation of position and velocity is not feasible with less than four satellites, and if this computation in GNSS engine is implemented in a filtering way, cascade filtering problem in GNSS/INS integration will arise.
To avoid the above drawbacks, TC is preferable. TC directly uses GNSS raw observations for measurement update, thus continuous aiding is feasible even with fewer than four satellites. Consequently, TC performs better in GNSS partly blocked areas. Conventional TC adopts pseudorange and Doppler observations for state estimation (TC-PD), which is simple and applicable in a single receiver case. However, due to the high noise and multipath error, the position accuracy is comparable to single point positioning (SPP). Unlike pseudorange, carrier phase is less effected by multipath and the multipath error is generally 100 times smaller (centimeter level) [
5]. Carrier phase is able to achieve centimeter level positioning accuracy when successfully solving the ambiguities. Therefore, many researches have been concentrated on integrating carrier phase with INS in TC, including real time kinematic (RTK)/INS [
6,
7,
8] and precise point positioning (PPP)/INS [
9,
10,
11]. RTK requires aiding of the base station to fix the ambiguity parameters, which is not feasible in situations where the base station is not available or affordable. PPP can work in a single receiver case with precise orbit and clock products provided by a global reference network (e.g., the International GNSS Service network). However, it generally requires a comparatively long time to become (re)convergent, which is not tolerable in some real-time applications. To exploit the high accuracy of carrier phase for a single receiver in real-time navigation, time-differenced carrier phase (TDCP)/INS integration is developed [
12,
13,
14,
15]. The bothersome ambiguities are eliminated in TDCP since ambiguities remain constant if no cycle slips occur. In addition, the temporal correlated ionospheric and tronospheric delays are also mitigated for a short sampling interval, which further benefits the accuracy of carrier phase [
12,
13].
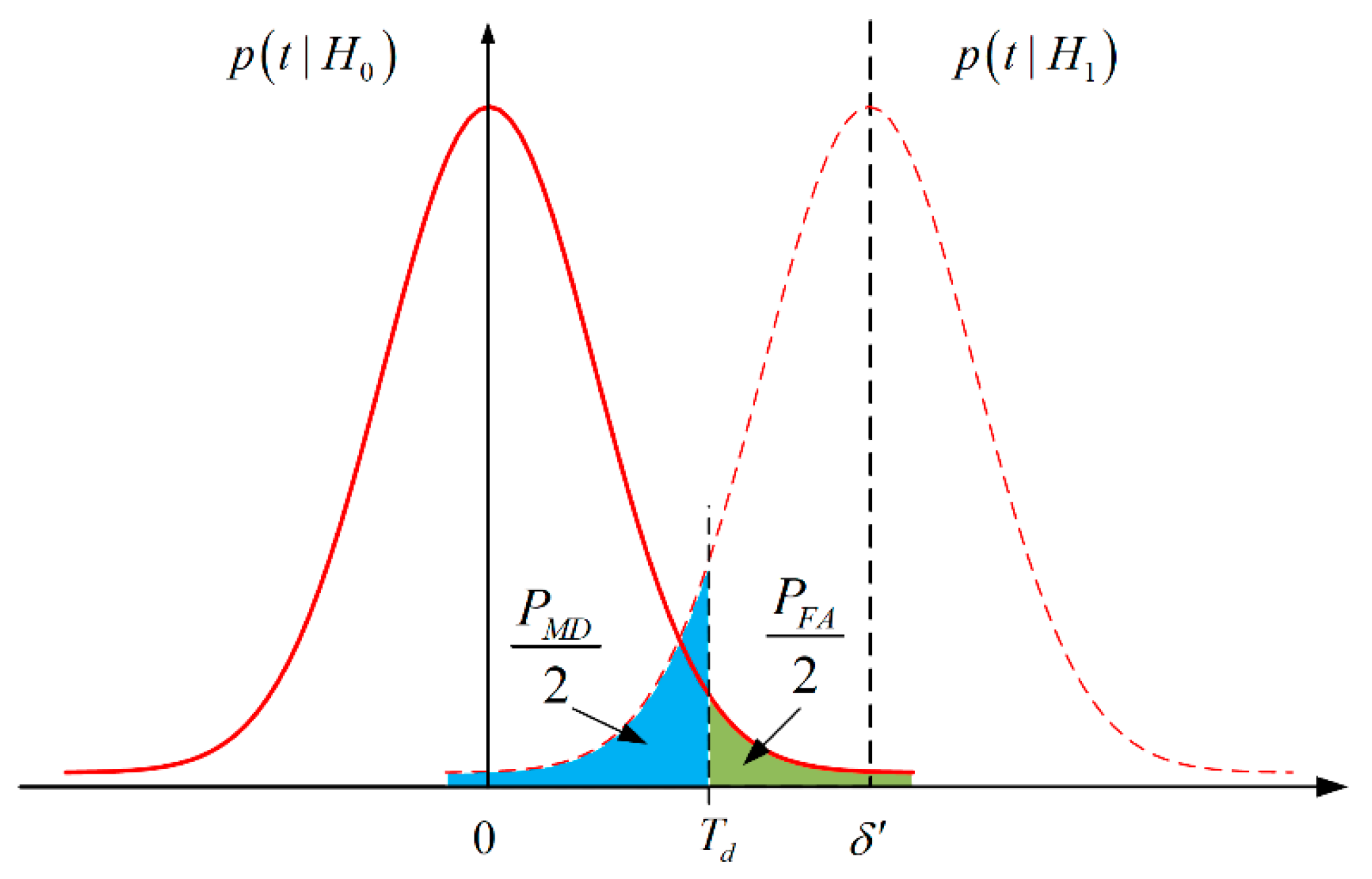
Apart from accuracy, the reliability of observations is also an important concern in TC. In blockage and foliage environments, GNSS faults, such as code outliers, phase slips, and ionosphere disturbances, may occur frequently due to the several multipath and fast-changing environments. The faulty observations violate the assumed GNSS stochastic model and if not properly handled, the integrated solutions would be deteriorated. In the literature, test-based outlier detection and robust estimation are two main streams for dealing with GNSS faults [
16,
17]. Baarda proposed to apply hypothesis test to detect outliers in geodetic measurement [
18]. Teunissen generalized it to recursive detection, identification, and adaptation (DIA) method [
19]. The DIA method has found its use in different GPS applications [
20,
21] and various configurations of integrated navigation systems [
19,
22]. Unlike DIA, the aim of robust estimation methods is to make the estimate insensitive to outliers or other statistical uncertainties, not to detect/identify/correct the outliers. In robust estimation community, with high efficient and accuracy, M-estimation is the prominent one which receives special attentions [
18]. Yang et al. proposed an adaptive robust KF which use M-estimation with fading factor for addressing both the system errors and measurement outliers [
23]. Moreover, M-estimation is also employed in nonlinear KF. e.g., the unscented Kalman filter [
24]. A robust KF based on the Mahalanobis distances and Chi-square test is devised to detect and then adapt the outliers [
25]. This method possesses some features of both the above two kinds and its efficacy was demonstrated in loosely-coupled GNSS/INS integration [
26]. However, the method uses all observations to form the test statistics and only one scaling factor is designed to inflate the covariance matrix of the innovation. In TC, it cannot effectively identify which measurement channels contain faults and the high accuracy of good observations will be sacrificed.
With the advent of multi-constellation multi-frequency GNSS, multi-type observations such as pseudorange, Doppler, and carrier phase of multiple satellites are available for measurement update in TC of GNSS/INS integration. The computational burden when processing observation vectors of high dimension must be considered, especially for an embedded CPU. In conventional KF, the observation vector is processed in one single measurement update, which is time consuming due to the inversion of high-dimensional matrix. Alternatively, the high-dimensional observations can be decomposed into multiple low-dimensional or scaler observations and then the measurement update is performed sequentially [
27]. The current researches about TC mainly focus on the modeling and robustness enhancement of GNSS/INS integration. Few papers are devoted to analyzing the computation cost of integration algorithms.
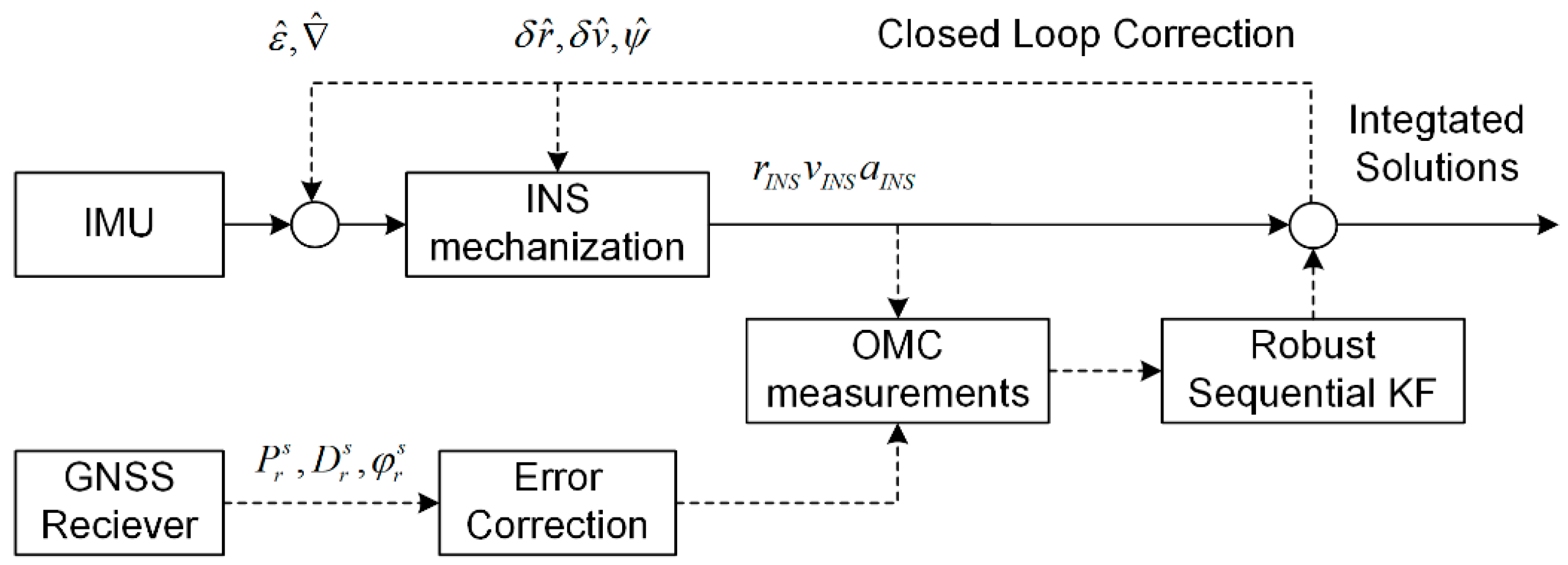
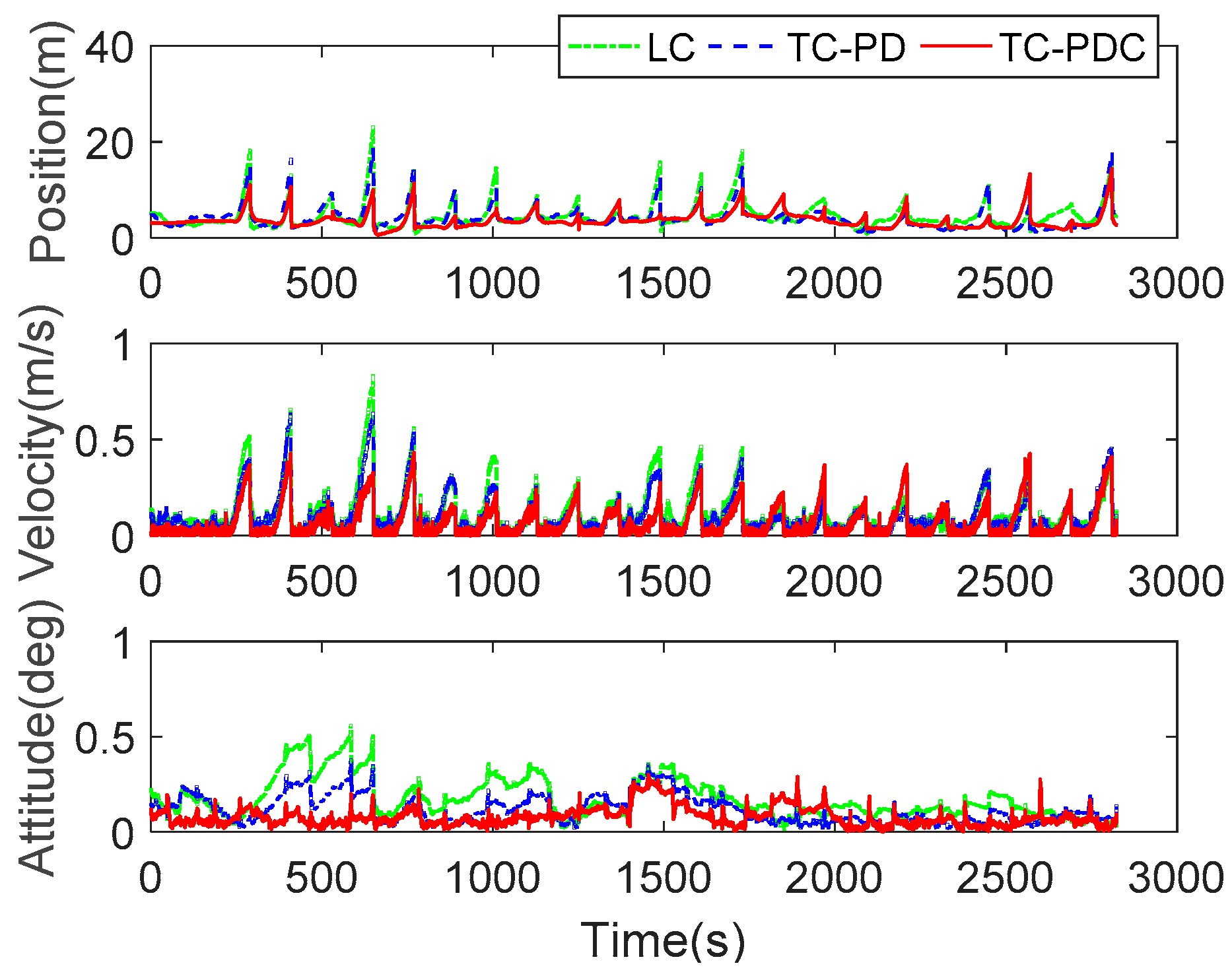
Considering the accuracy, robustness, and computational efficiency problems, we propose a robust and efficient implementation of tightly coupled GNSS/INS integration. All type observations, including pseudorange, Doppler, and carrier phase, are fused with INS to achieve the maximum possible navigation accuracy for a single receiver (TC-PDC). To improve the computational efficiency, sequential KF is employed to process the high-dimensional observations. Based on the innovation of sequential KF, a robust estimation method with Gaussian test is designed to detect and adapt the faults in individual channels. The performance of the proposed method, in terms of accuracy, robustness and computational efficiency, is analyzed by two vehicular field tests. Our contribution differs from previous work in the following aspects. (1) A complete performance comparison among LC, TC-PD, and TC-PDC is conducted to show the improvements of position, velocity, and attitude accuracy brought by the TDCP measurement. (2) A sequential robust estimation method is devised to utilize the faulty and good observations rationally. (3) The computation times are analyzed to reveal the superiority of sequential over batch mode.
This paper is organized as follows.
Section 2 describes the GNSS observation equations and the error mitigation strategies.
Section 3 establishes the mathematical model for TC GNSS/INS integration. The corresponding robust sequential KF is presented in
Section 4. The experimental results and analysis are given in
Section 5. Finally,
Section 6 concludes the whole paper.
2. GNSS Observations
The generic basic observation equations for pseudorange, Doppler, and carrier phase are given as follows
where
,
, and
are respectively pseudorange, Doppler, and carrier phase observations,
is the geometric range between a receiver-satellite pair,
and
are the receiver and satellite clock error,
and
are the ionospheric and tropospheric delay,
is the integer ambiguity,
is the speed of light,
is carrier phase wavelength, and
,
, and
represent the code, Doppler, and carrier phase noise, respectively.
To mitigate the nuisance errors and delays above, difference and combination techniques are adopted. We apply between-satellite single difference to eliminate receiver clock error. For carrier phase, time difference is also added to remove the ambiguity parameter. For pseudorange observation, the ionospheric delay is compensated using the dual-frequency ionosphere-free combination, and the tropospheric delay is mostly corrected by the Saastamoinen model [
28]. Considering atmospheric delays are temporally correlated, they less affect the Doppler observable and time difference carrier phase (TDCP). Denoting the between-satellite single difference and time difference operators by
then the compensated equations for Equation (1) read
with
and
the calculated ionospheric and tropospheric delays by the above methods.
6. Conclusions
With the rise of multi-constellation multi-frequency GNSS, tightly coupled integration of GNSS/INS benefits a lot in terms of accuracy, availability, and reliability. However, some nuisance issues also arise such as high computation burden and frequently encountered GNSS observation faults. In this research, we proposed a tightly coupled GNSS/INS integration algorithm using robust sequential KF for accurate vehicular navigation. Apart from pseudorange and Doppler used in traditional tight coupling, the time differenced carrier phase measurement is also incorporated to implement GNSS/INS data fusion. Considering the high dimension of observations, the measurement update step in KF is performed in a sequential way to improve the computational efficiency. Based on this sequential KF innovation, a robust estimation method is further developed to detect and resist the faults in individual channels. By doing so, the good observations can be kept as much as possible. Test results of suburban and urban field experiments are presented and performance comparison with traditional LC and TC-PD is made to validate the effectiveness and superiority of the proposed algorithm. Based on the results and analysis above, we can draw the following conclusions:
- (1)
Compared with TC-PD and LC, TC-PDC can significantly improves the velocity and attitude accuracy of integrated solutions, and further smooths the positioning error, which shows the superiority of the introduction of high-precision time differenced carrier phase observations.
- (2)
The innovation-based robust estimation method could effectively detect and resist the GNSS faults in individual channels, which guarantees the reliability of state estimation in GNSS challenging environments. With high-precision time-differenced carrier phase and robust estimation method, TC-PDC also shows better navigation accuracy even during long GNSS outages.
- (3)
For sequential KF, the computation cost will increase linearly with the increasing of the number of observations, while for batch KF, it is approximately proportional to the third order of the number of observations. The computational efficiency can be improved to a great extent if there are a large number of observations. Therefore, when implementing multi-constellation multi-frequency multi-type-observation tightly couple GNSS/INS integration, it is advised to adopt sequential KF to improve the computational efficiency.
In the future, the algorithm will be implemented on an embedded system consisting of low-cost MEMS and receiver to provide real-time navigation data, which plays a key role in vehicular applications. In addition, the integration with multiple auxiliary sensors such as odometer, radars, digital maps, cameras, etc., will also be considered as future work.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}