Joint Time-Reversal Space-Time Block Coding and Adaptive Equalization for Filtered Multitone Underwater Acoustic Communications

Abstract
:1. Introduction
2. Transmit Structure
2.1. System Model
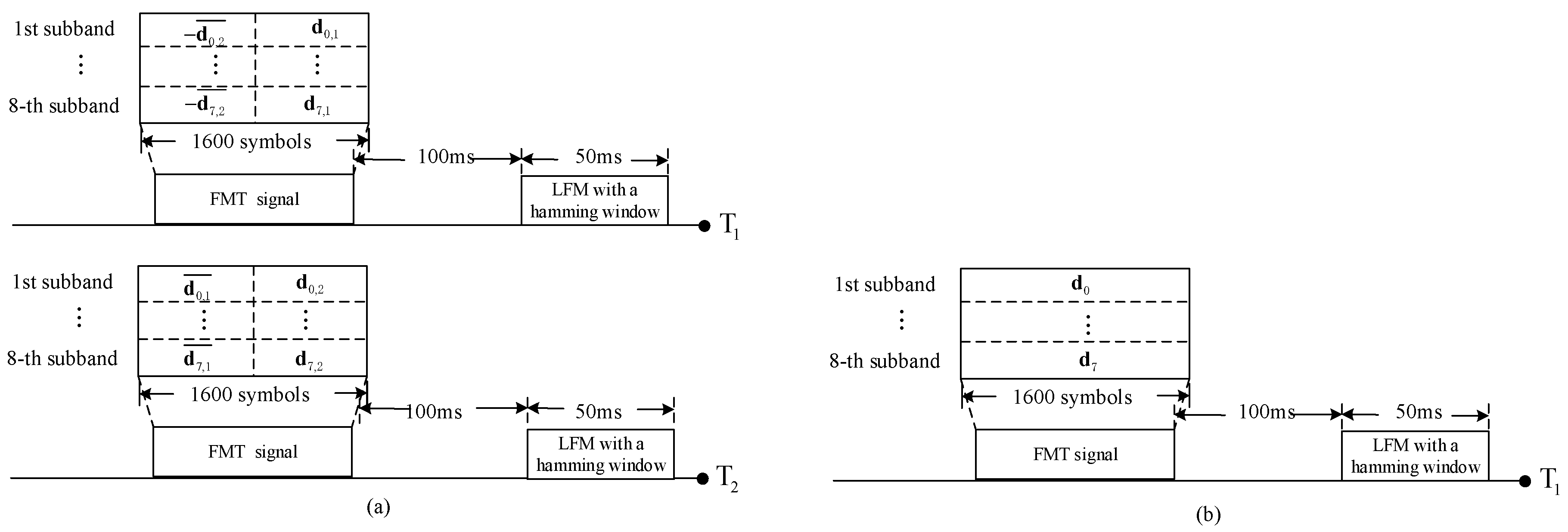
2.2. Time-Reversal Space-Time Block Coding (TR-STBC) Encoding and Filtered Multitone (FMT) Modulation
3. Receive Structure
3.1. System Model
3.2. FMT Demodulation
3.3. TR-STBC Decoding and Adaptive Equalization
4. Performance Assessment
4.1. Two Methods for Comparison
4.2. Simulation
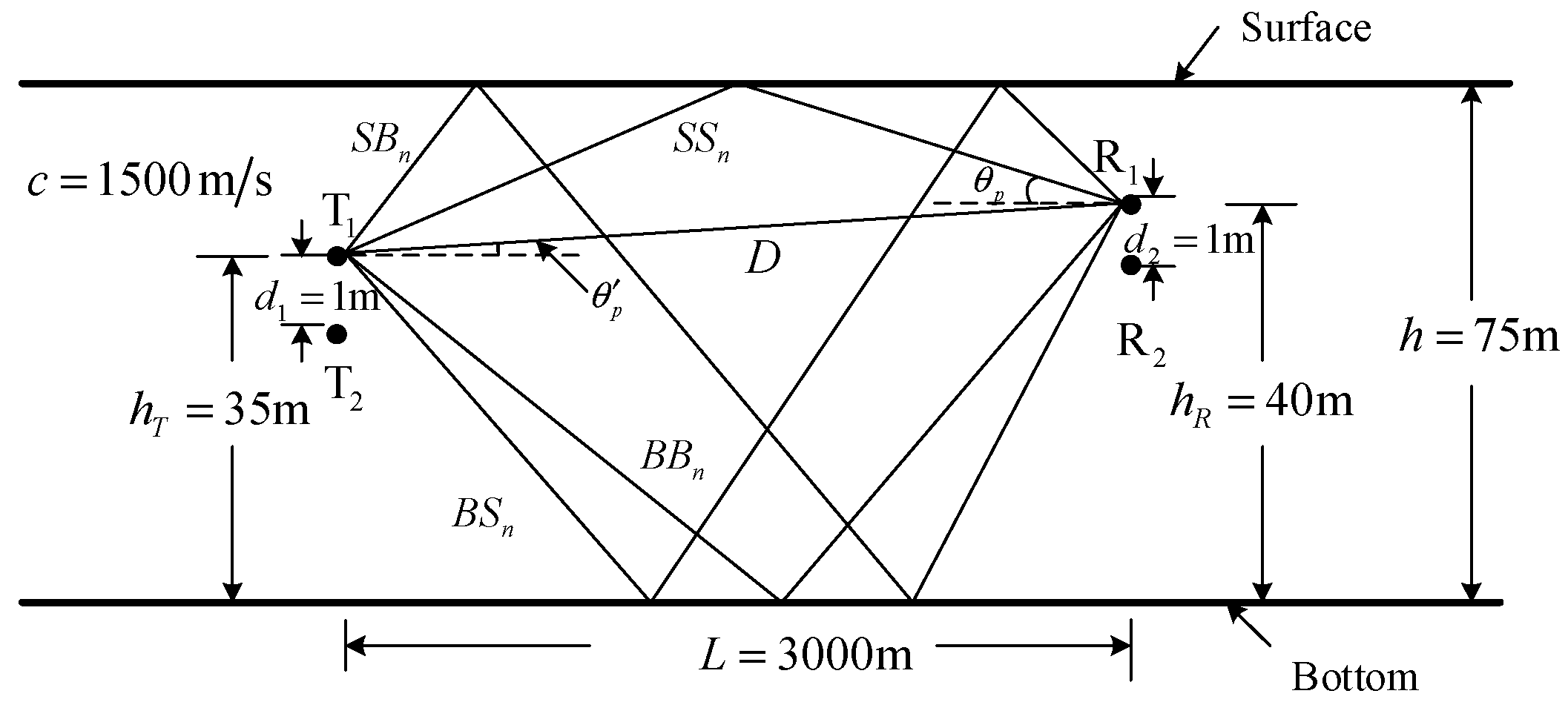
4.2.1. Channel Model
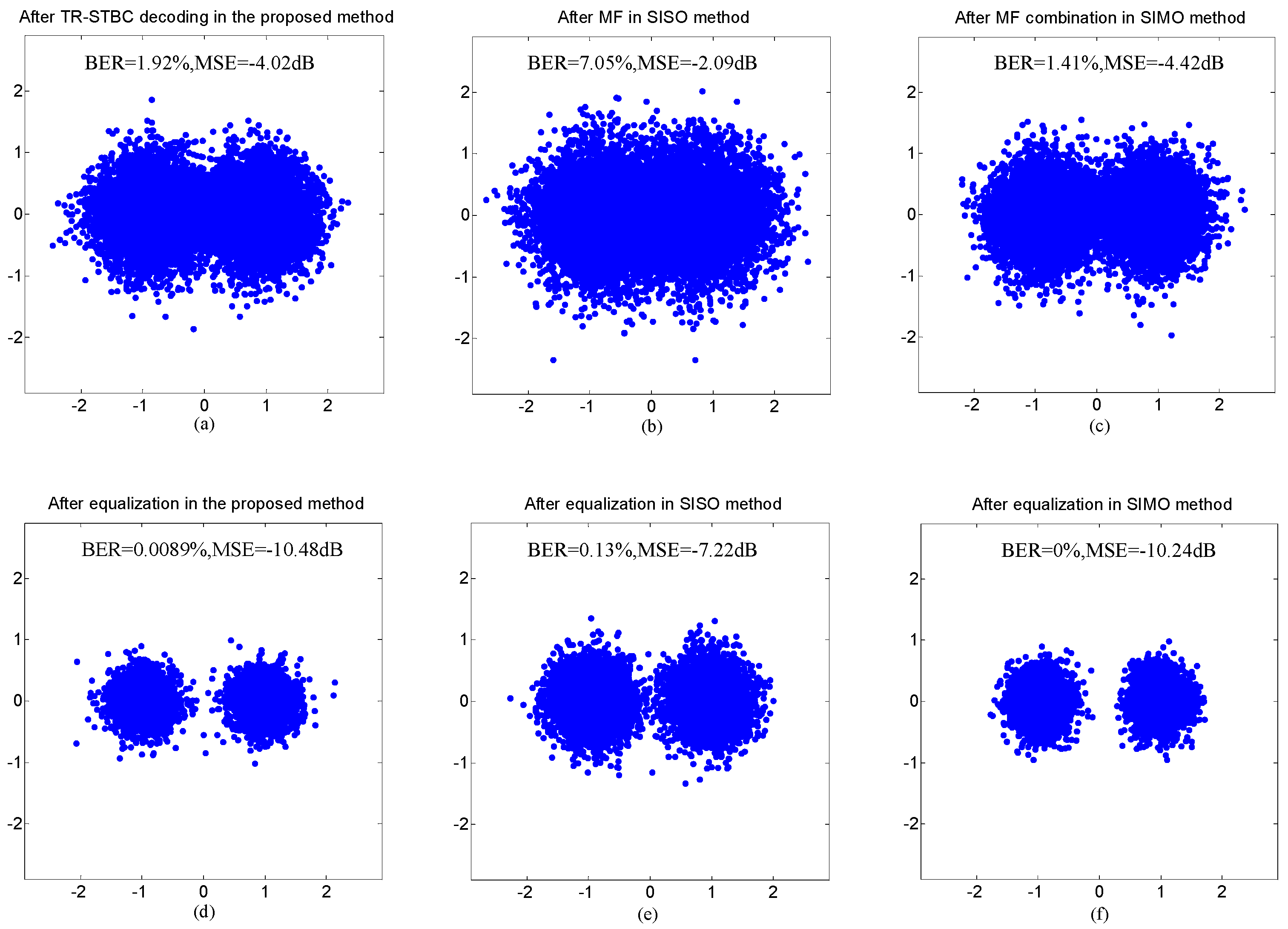
4.2.2. Simulation Results
4.3. Experiment
4.3.1. Experiment Setup
4.3.2. Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 1958, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Climent, S.; Sanchez, A.; Capella, J.; Meratnia, N.; Serrano, J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Singer, A.C.; Nelson, J.K.; Kozat, S.S. Signal processing for underwater acoustic communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Sun, D.; Liu, L.; Cui, H.; Zhang, Y. Single-carrier underwater acoustic communication combined with channel shortening and dichotomous coordinate descent recursive least squares with variable forgetting factor. IET Commun. 2015, 9, 1867–1876. [Google Scholar]
- Xia, M.L.; Rouseff, D.; Ritcey, J.A.; Xiang, Z.; Wen, X. Underwater acoustic communication in a highly refractive environment using SC–FDE. IEEE J. Ocean. Eng. 2014, 29, 491–499. [Google Scholar] [CrossRef]
- Xiao, H.; Yin, J.W.; Ge, Y.; Du, P.Y. Experimental demonstration of single carrier underwater acoustic communication using a vector sensor. Appl. Acoust. 2015, 98, 1–5. [Google Scholar]
- Han, X.; Guo, L.X.; Yin, J.W.; Sheng, X.L. Research on single carrier underwater acoustic communication based on multiband transmission. Acta Armamentarii 2016, 37, 1677–1683. [Google Scholar]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier communication over underwater acoustic channels with nonuniform doppler shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar]
- Mason, S.; Berger, C.R.; Zhou, S.; Willett, P. Detection, synchronization, and doppler scale estimation with multicarrier waveforms in underwater acoustic communication. IEEE J. Sel. Areas Commun. 2008, 26, 1638–1649. [Google Scholar] [CrossRef]
- Radosevic, A.; Ahmed, R.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Adaptive OFDM Modulation for Underwater Acoustic Communications: Design Considerations and Experimental Results. IEEE J. Ocean. Eng. 2014, 39, 357–370. [Google Scholar] [CrossRef]
- Skinder, Z.; Szczepanek, M.; Wilczewski, E. Differentially Coherent Multichannel Detection of Acoustic OFDM Signals. IEEE J. Ocean. Eng. 2015, 4, 251–268. [Google Scholar]
- Wan, L.; Zhou, H.; Xu, X.; Huang, Y.; Zhou, S.; Shi, Z.; Cui, J.H. Adaptive Modulation and Coding for Underwater Acoustic OFDM. IEEE J. Ocean. Eng. 2015, 40, 327–336. [Google Scholar] [CrossRef]
- Chi, W.; Yin, J.; Huang, D.; Zielinski, A. Experimental demonstration of differential OFDM underwater acoustic communication with acoustic vector sensor. Appl. Acoust. 2015, 91, 1–5. [Google Scholar]
- Gomes, J.; Stojanovic, M. Performance Analysis of filtered multitone modulation systems for underwater communication. In Proceedings of the IEEE International Conference on Oceans, Biloxi, MS, USA, 26–29 October 2009; pp. 1–5. [Google Scholar]
- Amini, P.; Chen, R.R.; Farhang-boroujeny, B. Filterbank multicarrier communications for underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 115–130. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, G.H.; Li, H.S.; Lan, H.; Mei, W. Filtered Multitone Modulation Underwater Acoustic Communications using Low-complexity Channel-estimation-based MMSE Turbo Equalization. Sensors 2019, 19, 2714. [Google Scholar]
- Li, H.S.; Sun, L.; Du, W.D.; Zhou, T.; Chen, B.W. Multiple-input multiple-output passive time reversal acoustic communication using filtered multitone modulation. Appl. Acoust. 2017, 119, 29–38. [Google Scholar] [CrossRef]
- Silva, L.; Gomes, J. Sparse Channel Estimation and Equalization for Underwater Filtered Multitone. In Proceedings of the OCEANS 2015–Genova, Genoa, Italy, 18–21 May 2015; pp. 18–21. [Google Scholar]
- Tarokh, V.; Jafarkhani, H.; Calderbank, A.R. Space-time block codes from orthogonal designs. IEEE Trans. Inf. Theory 1999, 45, 1456–1467. [Google Scholar] [CrossRef]
- Başar, E.; Aygolu, U.; Panayirci, E.; Poor, H.V. Space-time block coded spatial modulation. IEEE Trans. Commun. 2011, 59, 823–832. [Google Scholar] [CrossRef]
- Vajapeyam, M.; Vedantam, S.; Mitra, U.; Preisig, J.C.; Stojanovic, M. Distributed space-time cooperative schemes for underwater acoustic communications. IEEE J. Ocean. Eng. 2008, 33, 489–501. [Google Scholar] [CrossRef] [Green Version]
- Qu, F.; Wang, Z.; Yang, L. Differential orthogonal space-time block coding modulation for time-variant underwater acoustic channels. IEEE J. Ocean. Eng. 2016, 42, 188–198. [Google Scholar] [CrossRef]
- Roy, S.; Tolga, M.D.; Mcdonald, V.; Proakis, J.G. High-rate communication for underwater acoustic channels using multiple transmitters and space-time coding: Receiver structures and experimental results. IEEE J. Ocean. Eng. 2007, 32, 663–688. [Google Scholar] [CrossRef]
- Diggavi, S.N.; Al-dhahir, N.; Stamoulis, A.; Calderbank, A.R. Differential space-time coding for frequency-selective channels. IEEE Commun. Lett. 2002, 6, 253–255. [Google Scholar] [CrossRef]
- Yun, L.; Wei, Z.; Ching, P.C. Time-Reversal Space-Time Codes in Asynchronous Two-Way Relay Networks. IEEE Trans. Wirel. Commun. 2015, 15, 1174–1729. [Google Scholar]
- Stefan, G.; Lang, T.; Scaglione, A. Time-reversal space-time coding for doubly-selective channels. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC 2006), Las Vegas, NV, USA, 18 September 2006; pp. 1638–1643. [Google Scholar]
- Stojanovic, M. Retrofocusing techniques for high rate acoustic communications. J. Acoust. Soc. Am. 2005, 117, 1173–1185. [Google Scholar] [CrossRef]
- Yoon, Y.H. High-Rate Digital Acoustic Communications in a Shallow Water Channel. Ph.D. Thesis, University of Victoria, Victoria, BC, Canada, 1999; pp. 38–68. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | The Proposed Method | SISO Method | SIMO Method |
|---|---|---|---|
| The number of transmit elements | 2 | 1 | 1 |
| The number of receive elements | 1 | 1 | 2 |
| Communication band (kHz) | 8–16 | 8–16 | 8–16 |
| The number of sub-bands of filtered multitone (FMT) modulation | 8 | 8 | 8 |
| Roll-off factor of each transmit filter | 0.5 | 0.5 | 0.5 |
| Mapping pattern | Binary phase shift keying (BPSK) | BPSK | BPSK |
| Number of symbols on each sub-band | 1600 | 1600 | 1600 |
| Number of training symbols on each sub-band | 200 | 200 | 200 |
| The number of equalization coefficients on each sub-band | 13 | 13 | 13 |
| Forgetting factor of recursive least square (RLS) | 0.999 | 0.999 | 0.999 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Yan, M.; Li, H.; Xu, Y. Joint Time-Reversal Space-Time Block Coding and Adaptive Equalization for Filtered Multitone Underwater Acoustic Communications. Sensors 2020, 20, 379. https://doi.org/10.3390/s20020379
Sun L, Yan M, Li H, Xu Y. Joint Time-Reversal Space-Time Block Coding and Adaptive Equalization for Filtered Multitone Underwater Acoustic Communications. Sensors. 2020; 20(2):379. https://doi.org/10.3390/s20020379
Chicago/Turabian StyleSun, Lin, Ming Yan, Haisen Li, and Yanjie Xu. 2020. "Joint Time-Reversal Space-Time Block Coding and Adaptive Equalization for Filtered Multitone Underwater Acoustic Communications" Sensors 20, no. 2: 379. https://doi.org/10.3390/s20020379