4.1. Propagation Error
The range of acoustic sensors depends on various physical and environmental parameters, as listed in
Table 3. The ranging accuracy and resolution determine the performance of the range measurement device. The ranging equation is given by
where
where
Rm is the measured range,
Ra is the actual range from the transmitter (
xT,
yT,
zT) to the receiver (
xR,
yR,
zR), and
ε is the error in the measured range. The error term
ε comprises chiefly of error due to atmospheric effects (
εAtm), Doppler shift (
εDs) and multipath (
εMp). The uncertainty in range measurement (
σR) can be obtained by calculating the deviation in range measurement error from all possible error sources. The cumulative deviation of ranging error is given by
A case study was conducted to numerically validate the error budget modelling, taking representative numerical values of variables, as shown in
Table 4, giving an error of 0.09 m for the indoor test environment conditions. However, in operational situations, the hardware limitations associated with the real-world application of acoustic sensors for navigation can introduce additional errors, which are discussed in the subsequent sections.
4.2. Hardware Delays
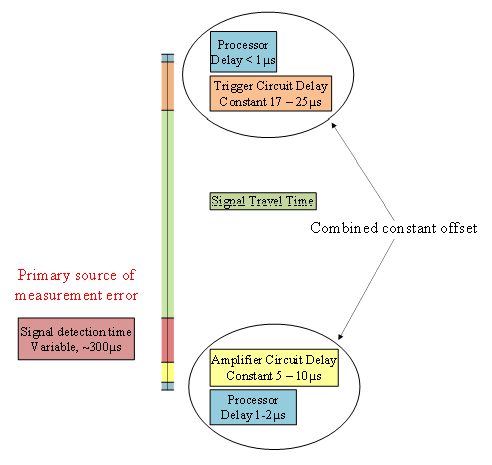
Besides the errors in sound propagation, there are certain hardware limitations at both the transmitter and receiver side which can introduce additional errors due to circuit delays. Most of the circuit delays, as shown in
Figure 3, are constant and hence can be removed except the signal detection delays at the receiver, which vary with the distance from the transmitters and have to be experimentally determined in order to be accounted for in the range measurements.
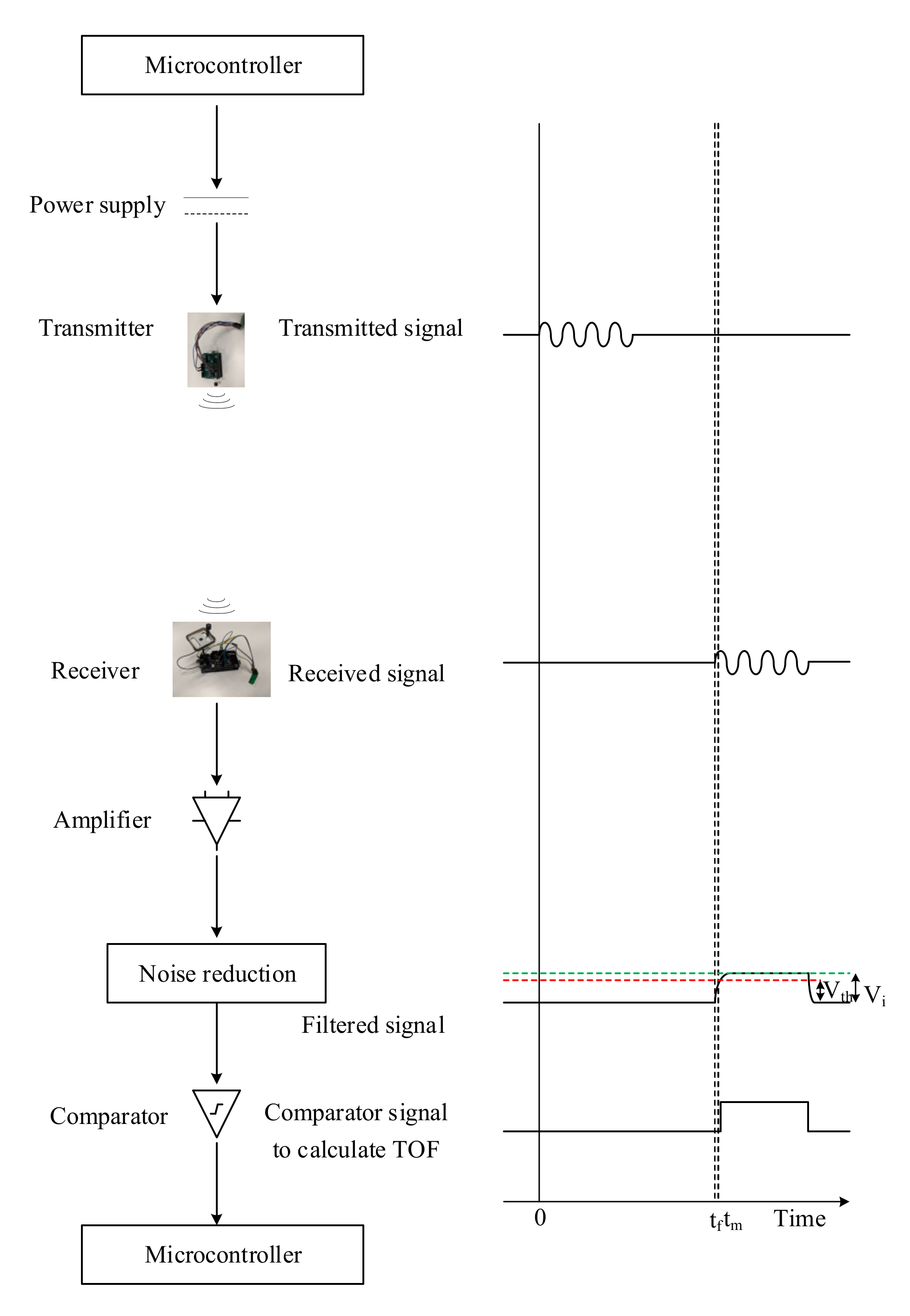
The variable delay at the receiver in detecting the incoming acoustic signal is due to the time it takes for the input voltage (
Vi) to reach threshold voltage (
Vth) [
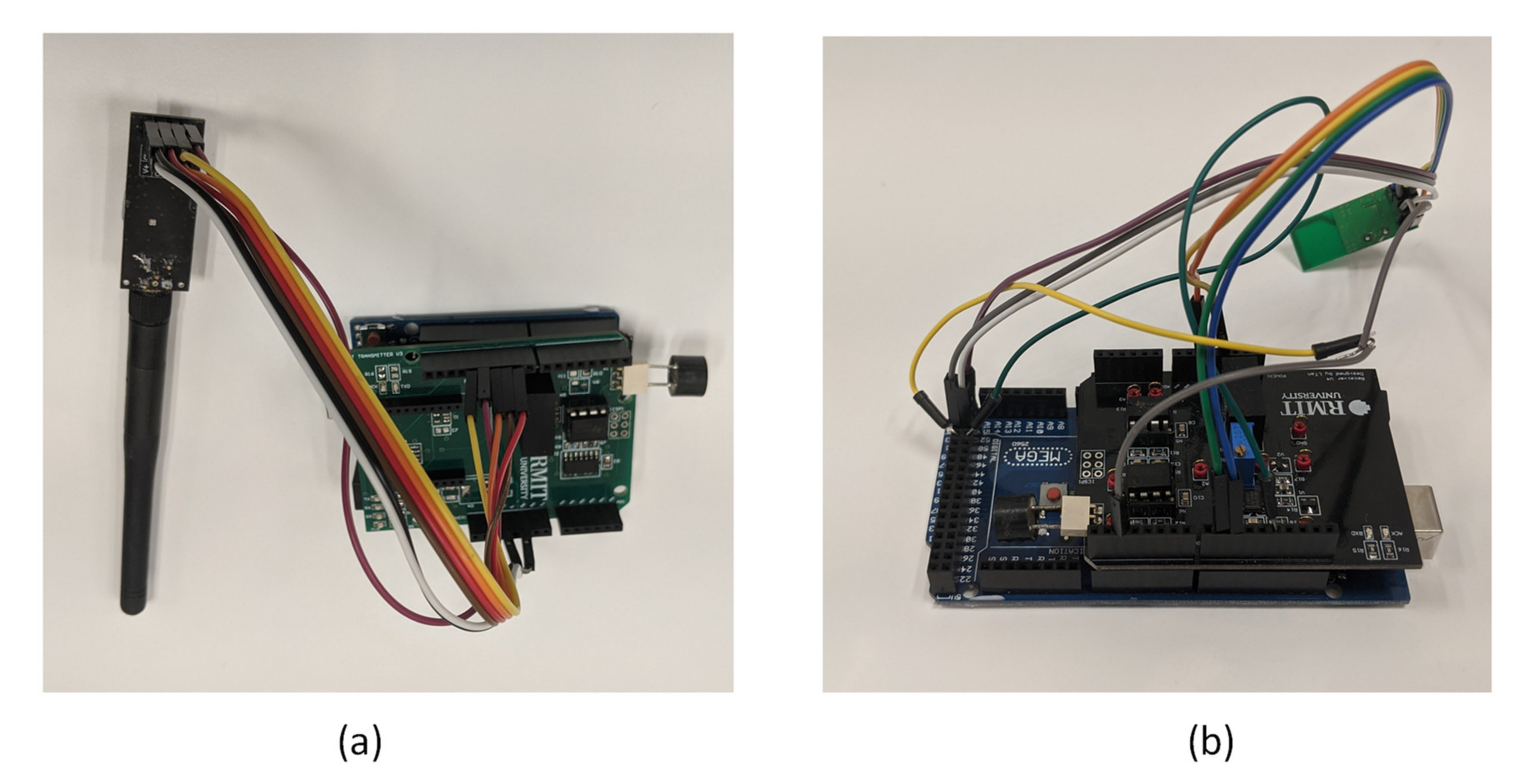
23], as shown in the APNS schematic in
Figure 4. The threshold voltage of the comparator circuit (
Vth) is related to the input voltage (
Vi) by
where
τ is the time constant, and
td is the time required for the input voltage (
Vi) to reach the level of threshold voltage (
Vth) of the comparator. Equation (7) can also be written in terms of
td as
Denoting other circuit and microcontroller delays at the transmitter and receiver side as
to and the measured time of arrival (ToA) as
tm, the actual ToA (
ta) can be written as
The model developed for sound attenuation considers both geometric divergence and atmospheric absorption, while assuming there are no reflections, for the sake of simplification. The input voltage at the receiver (
Vi) is inversely proportional to the distance of the receiver to the transmitter, assuming a constant amplifier gain and threshold voltage (
Vth). The voltage at the transmitter and the receiver can be assumed to be directly proportional to the sound pressure at the respective ends, while the pressure of a planar sound wave at a distance
r from a point of pressure
P0, considering the effect of atmospheric absorption, can be calculated as
where
α is the attenuation coefficient for absorption of sound in air, which depends on frequency of sound, humidity, temperature and pressure [
13]. Thus, Equation (8) can be written as
With voltage threshold being constant,
P0 can also be assumed to be constant and account for atmospheric absorption. Due to the highly directional nature of the sound waves, the voltage at the receiver due to the transmitted signal depends upon the relative directivity of the transmitter–receiver pair. Denoting the directivity of transmitter and receiver by
kt and
kr, respectively, and inserting the value of
td in Equation (9), we obtain
where
K and
to are constants and
r is the distance between the transmitter and the receiver, which can be iteratively calculated as
vta, based on an initial estimate of
ta. Alternatively, the value of
r can also be determined independently and put in Equation (12). The constants
K and
to can be determined experimentally. The voltage at the receiver is also dependent upon the relative angle (θ) between the transmitter and the receiver. Hence, the transmitter and receiver directivities (
kt and
kr) can be represented by a single function
K(θ).
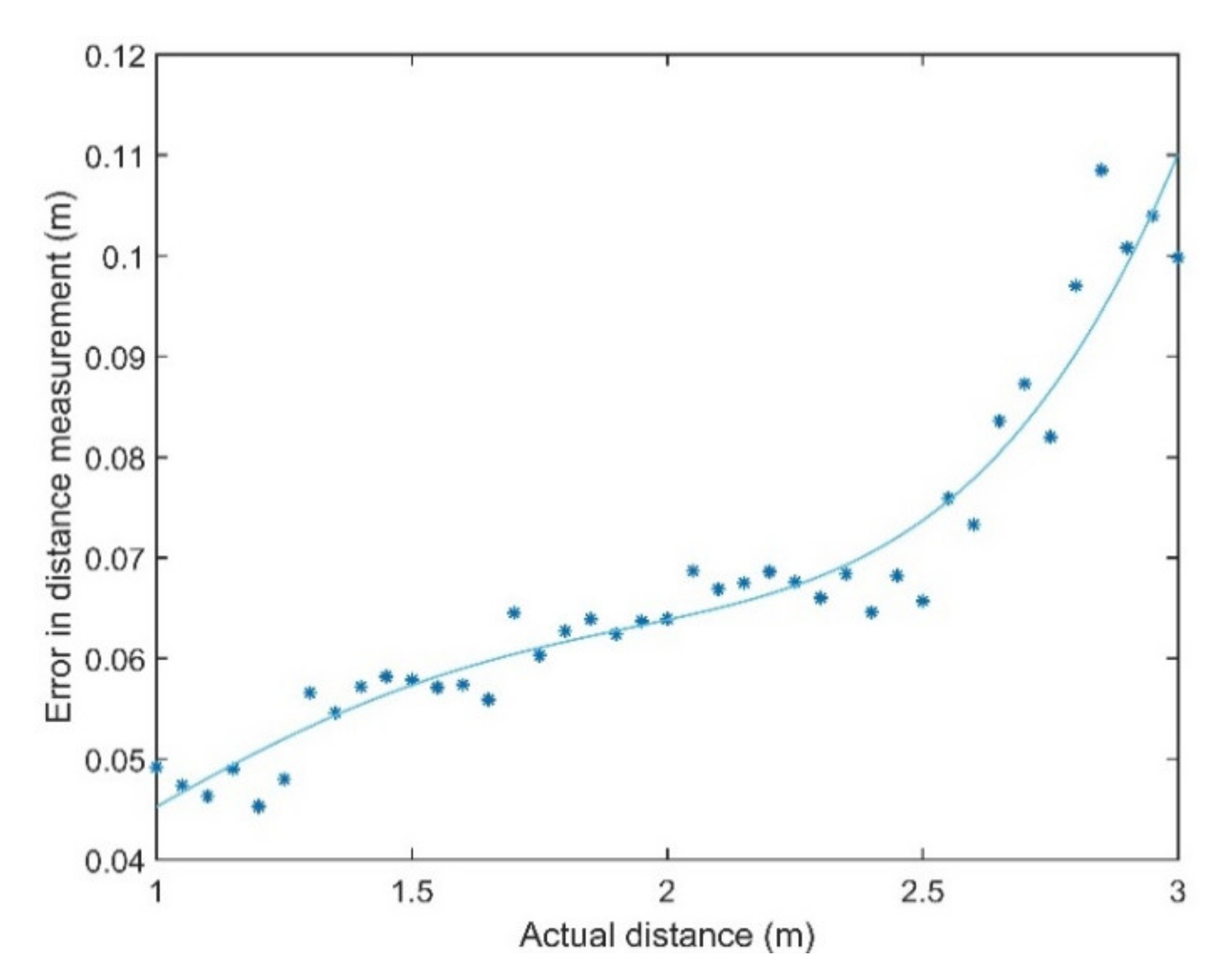
However, the variability in signal detection time is mostly due to propagation losses and its uncertainty.
Figure 5 shows the variation of delays at the receiver with the distance from the transmitter. It can be observed that there is a sharp increase in receiver delay between the transmitter and the receiver from 2.5 m onwards. A delay of 300 µs can introduce an error of about 10 cm.
4.3. Navigation Error
All navigation systems demonstrate a statistical dispersion in their indication of position and velocity, which, as the navigation system becomes more accurate, can be predicted and hence differentiated from the noise [
25]. The deterministic errors, like the propagation errors in APNS, are added algebraically, and the statistical errors are root sum squared, while their sum is referred to as total system error.
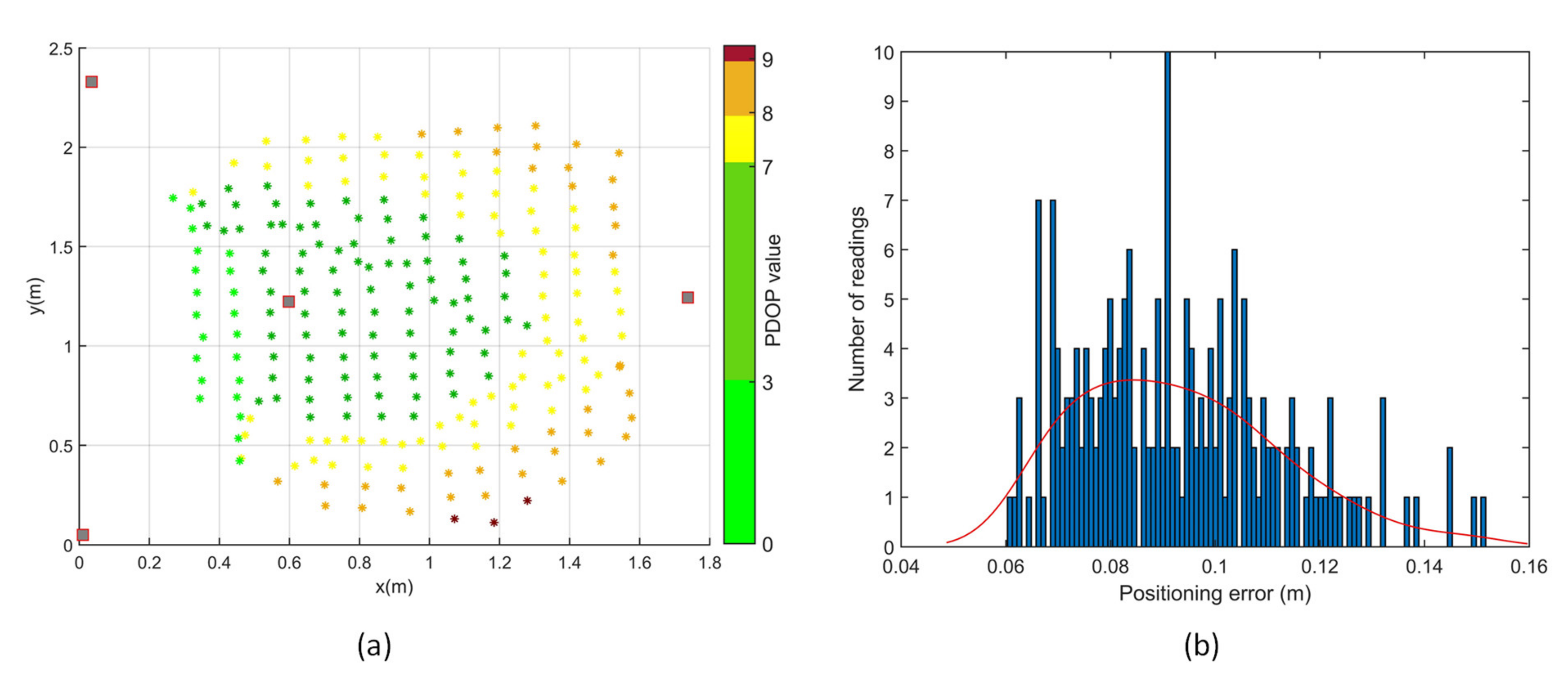
The mean error and the circular error probability (CEP), also known as the circular probable error (CPE), of the positioning solution are the two parameters that give a measure of the performance of a navigation system. The CEP is the radius of a circle that encloses 50% of the measurements, which in 3D can be represented by the spherical error probable (SEP), which is the radius of a sphere that encloses 50% of all three-dimensional errors. The principal axes are chosen as such that the components of the position errors along each axis are uncorrelated, such that the errors along each axis when plotted separately as cumulative distribution curves, show Gaussianity. One-sigma position errors can also give a measure of the performance of the navigation system. Navigation test data usually contains a bias, leading to non-Gaussian distribution of data, which can be accounted for by taking 95% of the test points centred on the desired navigation fix.
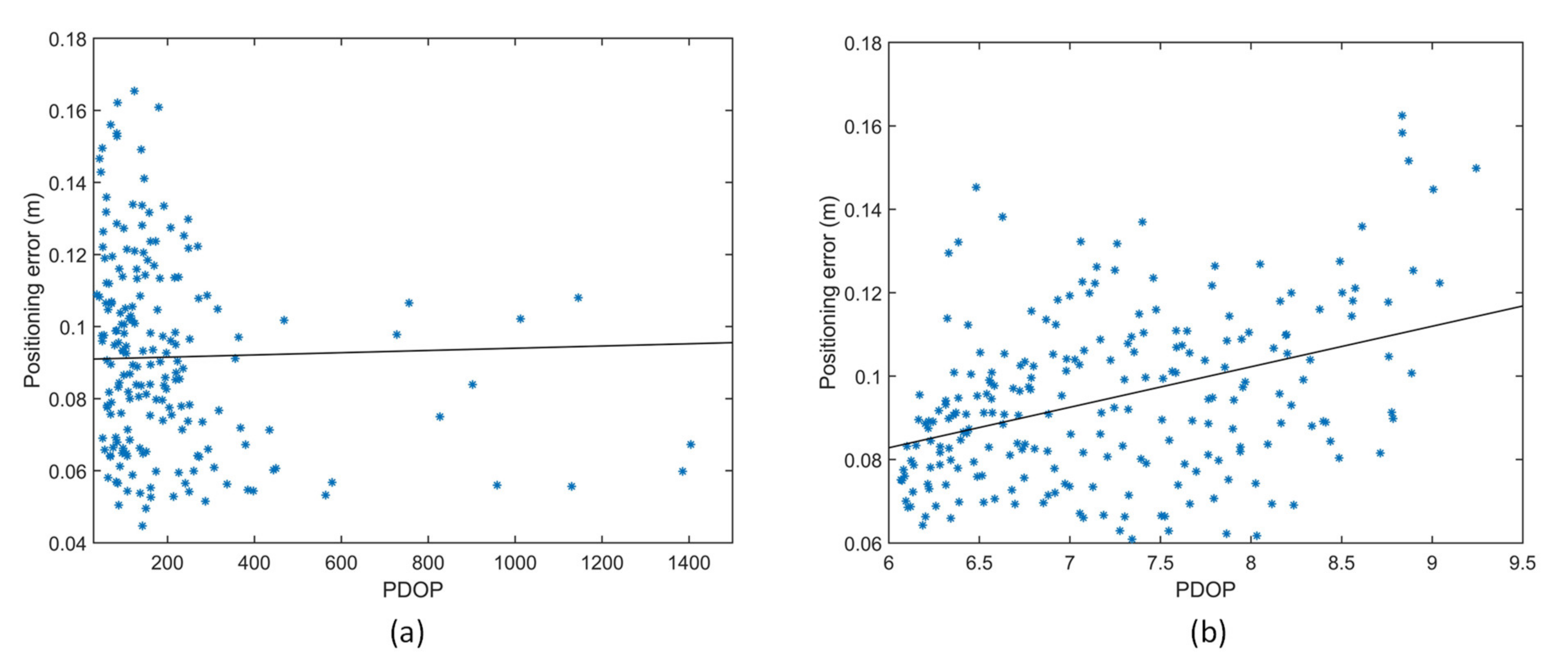
The ranging error is related to the dispersion in measured position by the term geometric dilution of precision (GDOP). If there are three range measurements in orthogonal directions, the standard deviations in position error are the same as those of the three range sensors. However, if the range measurements are more than three or non-orthogonal, the position error can be smaller or much larger than the error in each range measurement. Let
be the position and clock offset (Δ
t) error vector. Let
be the 1-sigma ranging error vector. Matrix A can be written as
where
is the unit vector pointing from the receiver to the
ith transmitter, with cos
ai, cos
bi and cos
ci being the direction cosines. The ranging error is related to the position and clock offset errors by
where
and
. Dilution of precision can be computed from the diagonal elements of
, which is the covariance matrix
C.
The PDOP is given by the diagonal elements of the covariance matrix [
26]:
The horizontal dilution of precision (HDOP) and vertical dilution of precision (VDOP) are given by
In pseudoranging systems, the
GDOP is given by
where
TDOP is the time dilution of precision given by
. Additionally,
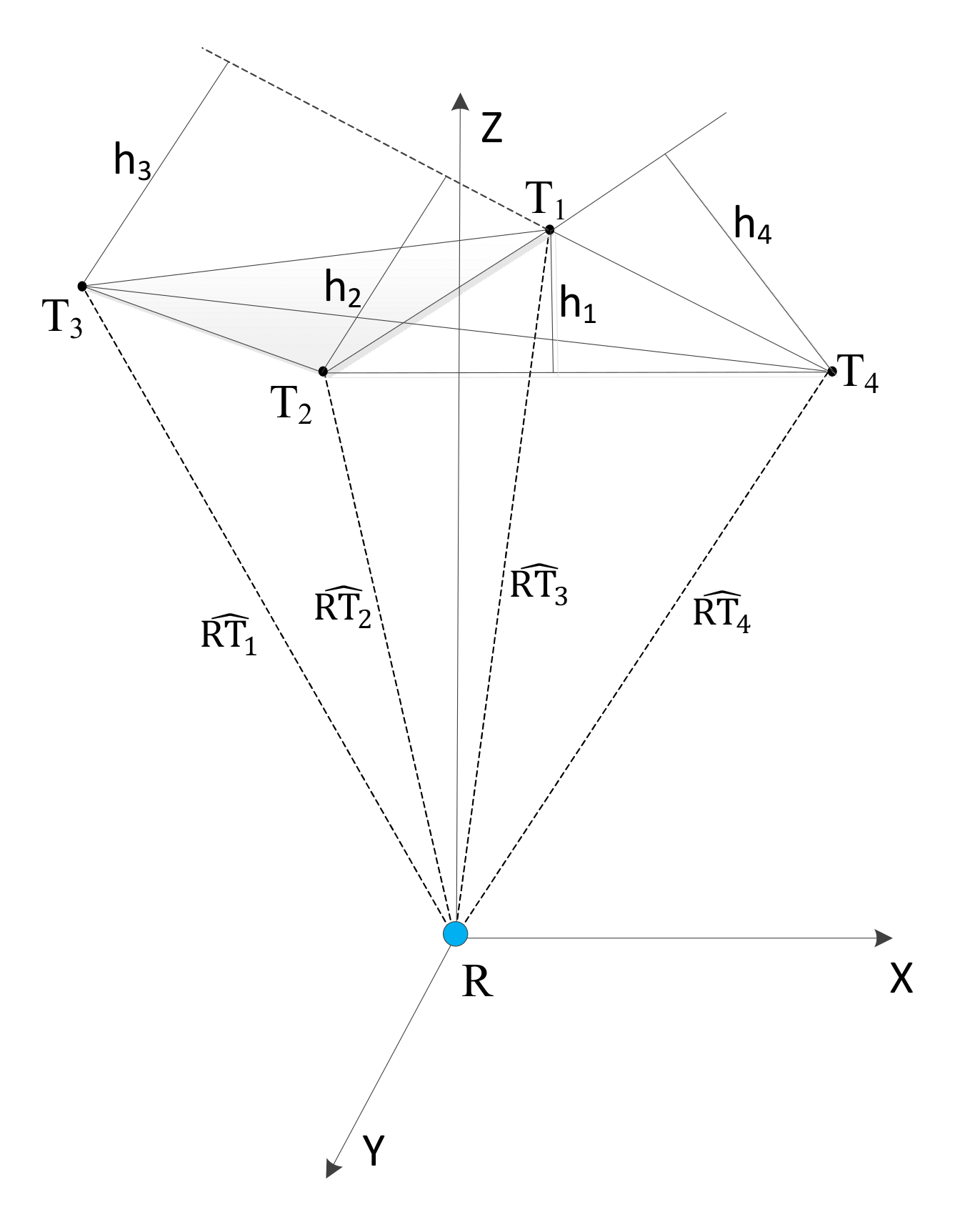
PDOP can also be represented in terms of residual sum of squares of variances of the position errors or from altitudes of the tetrahedron formed by joining unit vectors from four transmitters and one receiver [
27].
where
is the variance of range, assuming the value to be equal for each range measurement;
,
, and
are the variances of the position errors along each axis; and
,
,
, and
are altitudes of the tetrahedron. The unit vector from a point
Ri to a transmitter
Ti is given by
The tetrahedron formed by joining the unit vectors
,
,
and
, from the receiver to the four transmitters
T1,
T2,
T3 and
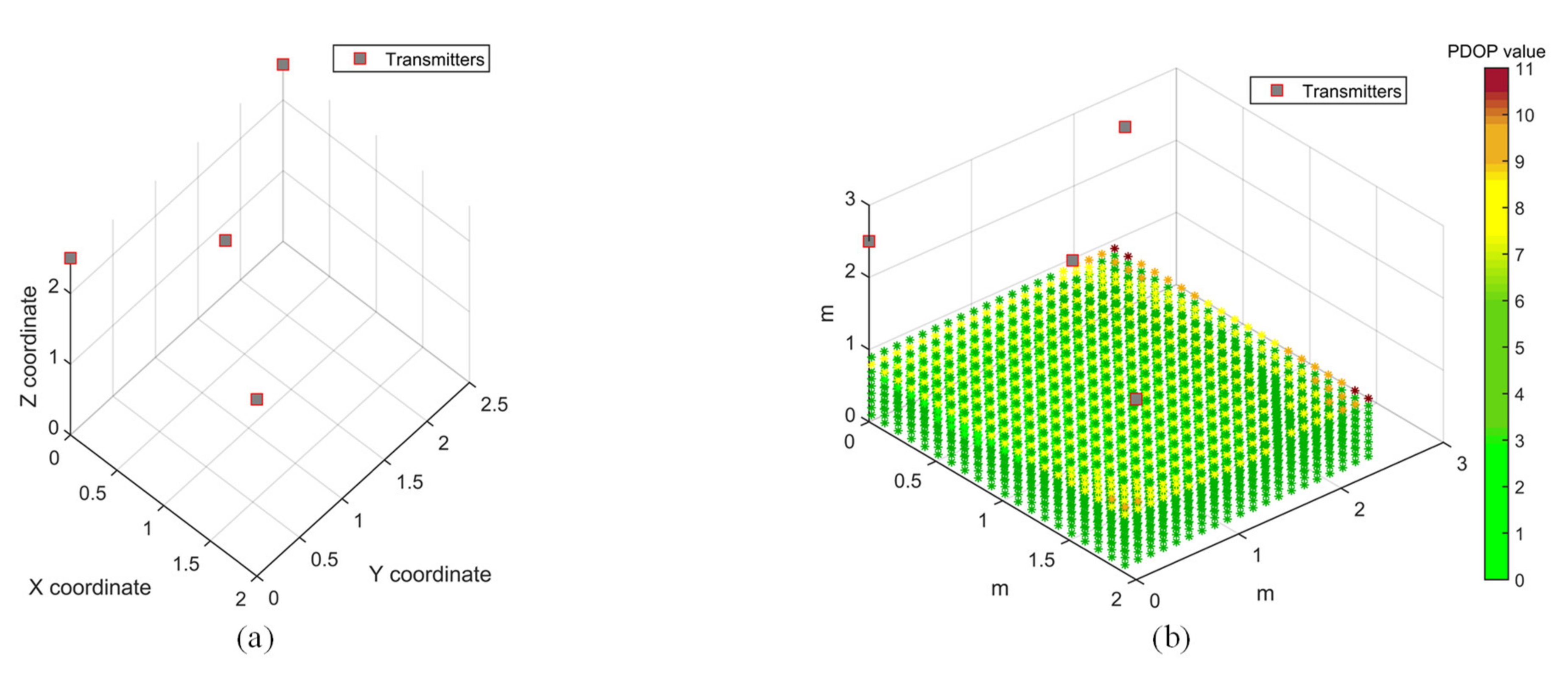
T4, as shown in
Figure 6, is used for geometrically evaluating the PDOP values. Alternatively, the statistical values of PDOP can also be used to analyse the optimal sensor arrangement [
28]. The calculation of statistical values of PDOP requires a priori knowledge of the variances of position errors along each axis as well as the variance in range measurements, which can only be determined experimentally. This paper follows the geometric approach to evaluate the PDOP and performs optimisation of transmitter arrangement for minimizing PDOP in the test volume in the next section, which will subsequently lead to positioning experiments. If there are more than four transmitters, the number of possible combinations (
N) of four transmitters required to calculate PDOP is given by Equation (22), where
m is the number of transmitters.
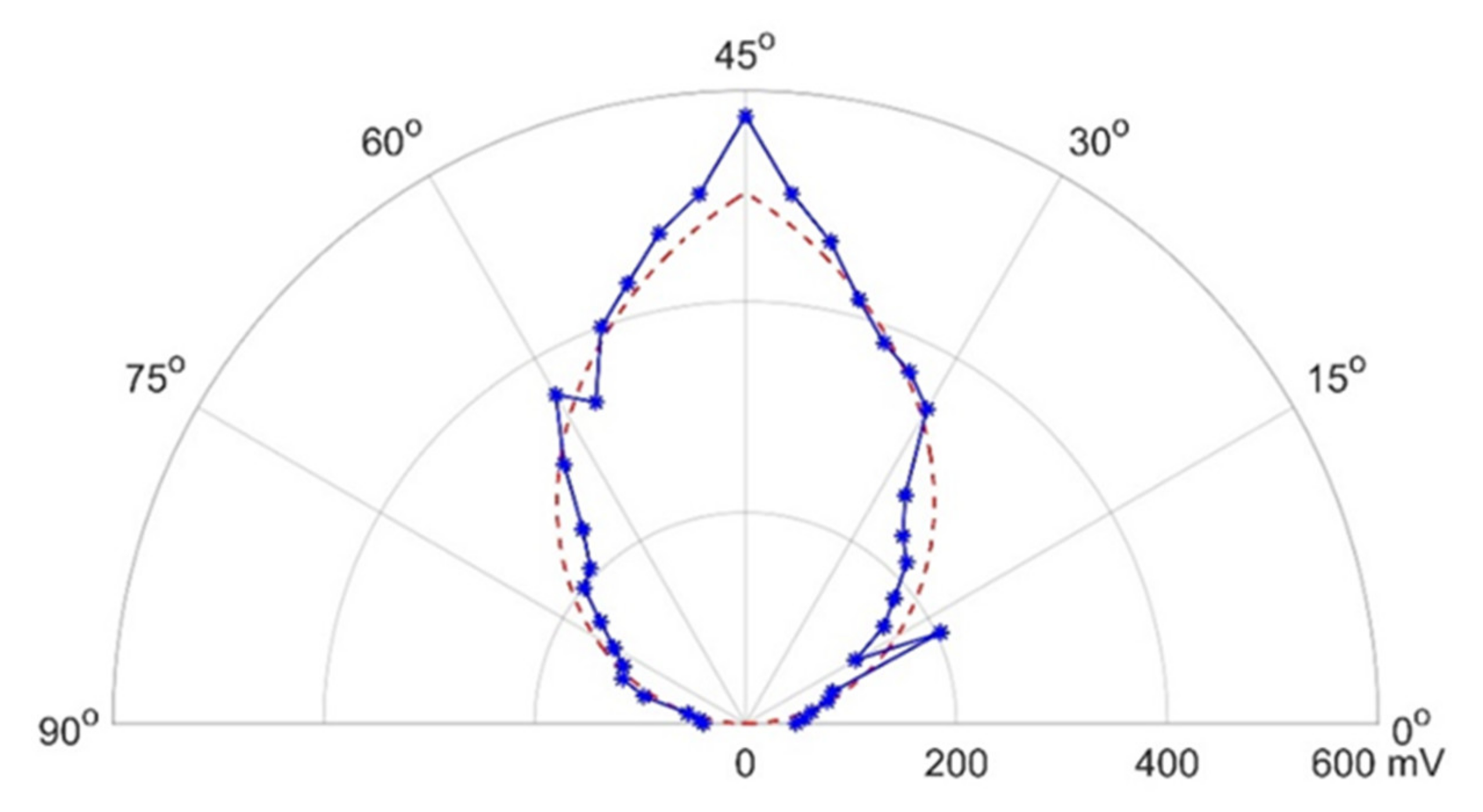
Figure 7 shows the angular variation of directivity of the transmitter–receiver pair. The optimisation of transmitter deployments, therefore, depends not just on the PDOP values but also on the relative directivity of the transmitter–receiver pair, which determines the transmitter availability [
28].
The optimisation of transmitter arrangement can be described by the function defined in Equation (23), where
W1 and
W2 are the respective weights for
PDOP and transmitter–receiver directivity function
K(θ):
The curve fitting equation in
Figure 7 is given by
where
θ is the relative angle between the transmitter and the receiver.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}