A Distributed Radio Beacon/IMU/Altimeter Integrated Localization Scheme with Uncertain Initial Beacon Locations for Lunar Pinpoint Landing


Abstract
:1. Introduction
- Only lander-beacon range measurements are utilized as inter-beacon measurements and are easily blocked by obstacles, such as craters on the lunar surface.
- A batch-least-squares trilateration algorithm similar to [39] was adopted for the initialization of beacon locations, as their prior rough estimations are available and the inertial measurement unit (IMU) used in our application is much more accurate than that used in the majority of RO-SLAM applications.
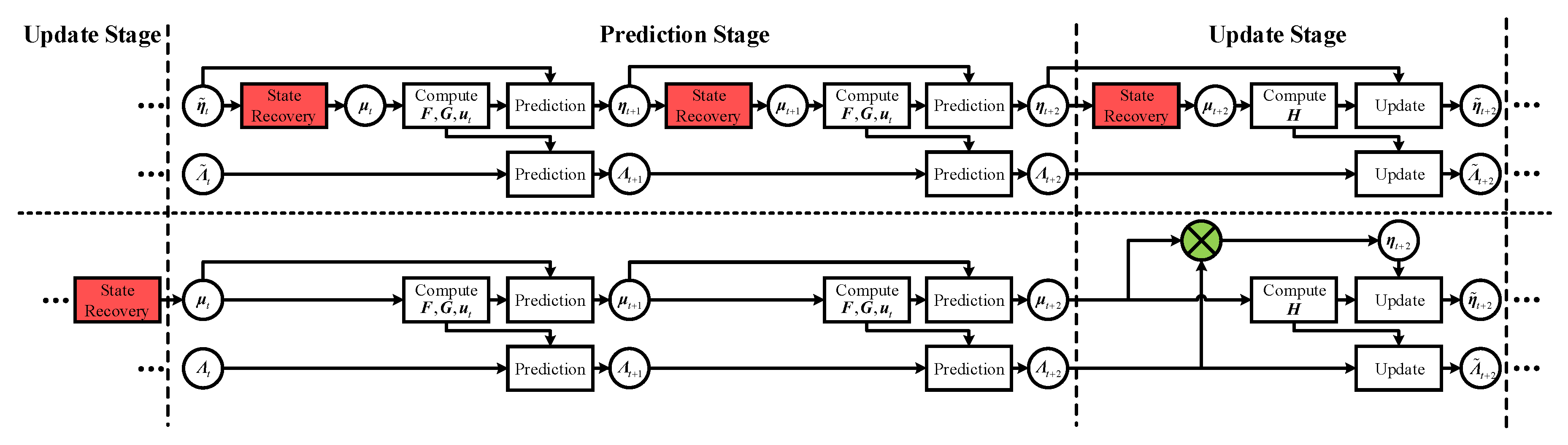
- The navigation state between two successive measurements was propagated by a hybrid form of the “mean vector + information matrix” to avoid the frequent conversion from the information vector to the mean vector, which can improve the computational efficiency of the prediction stage.
- An adaptive iteration algorithm with the damping factor was adopted in the update stage, which can both improve the accuracy and efficiency of the estimator.
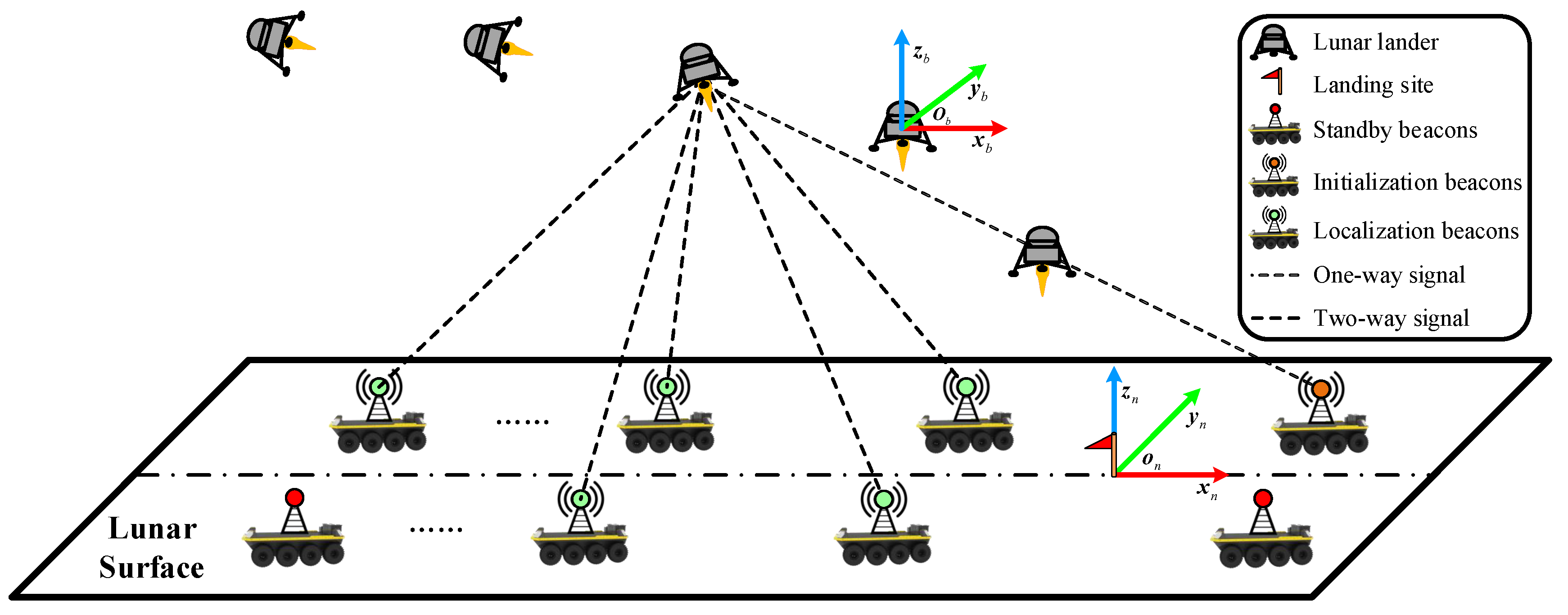
2. Problem Formulation
3. Adaptive Iterated Sparse Extended Hybrid Filter
3.1. State Definition and Jacobians
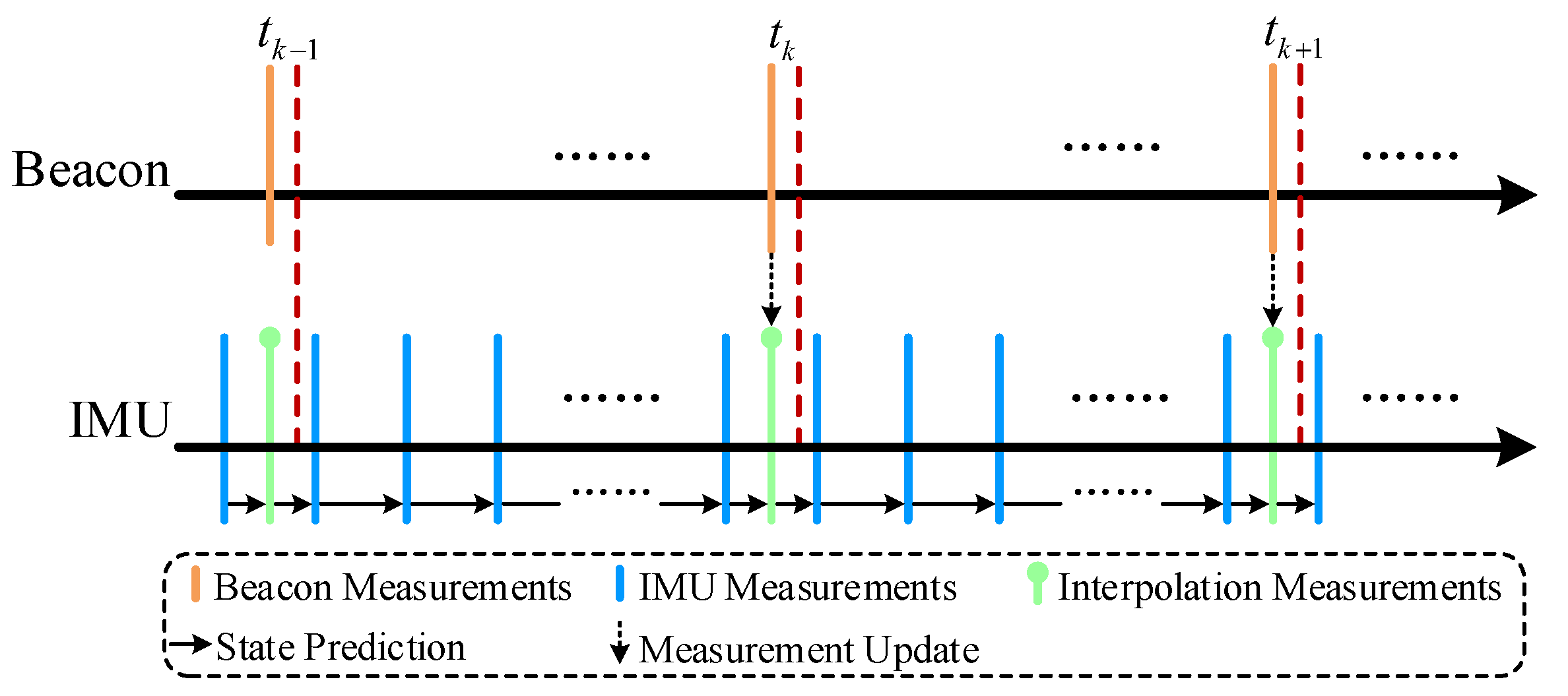
3.2. Temporal Alignment of Asynchronous Measurements
3.3. Hybrid State Prediction
3.4. Adaptive Iterated Measurement Update
3.4.1. Iterated Measurement Update
3.4.2. Iterated Measurement Update with Damping Factor
3.4.3. Damping Factor and Stopping Criteria
4. Results and Discussions
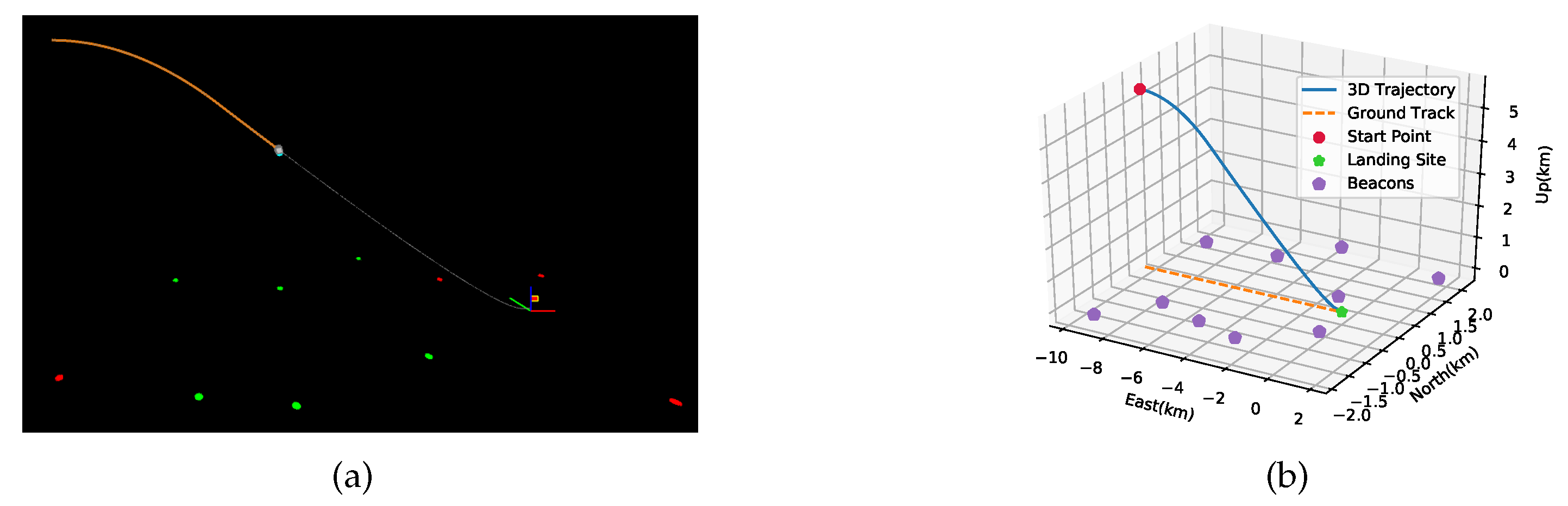
4.1. Simulation Scenario and Parameters
4.2. Simulation Results and Analyses
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Adaptive Iterated Update Algorithm
References
- Qin, T.; Zhu, S.; Cui, P.; Gao, A. An innovative navigation scheme of powered descent phase for Mars pinpoint landing. Adv. Space Res. 2014, 54, 1888–1900. [Google Scholar] [CrossRef]
- Yang, H.; Li, S.; Bai, X. Fast homotopy method for asteroid landing trajectory optimization using approximate initial costates. J. Guid. Control Dyn. 2019, 42, 585–597. [Google Scholar] [CrossRef]
- Bai, C.; Guo, J.; Zheng, H. Optimal Guidance for Planetary Landing in Hazardous Terrains. IEEE Trans. Aerosp. Electron. Syst. 2019, 99, 1–12. [Google Scholar] [CrossRef]
- Theil, S.; Bora, L. Multiple beacons for supporting lunar landing navigation. CEAS Space J. 2018, 10, 295–305. [Google Scholar] [CrossRef] [Green Version]
- Bora, L. Ground Beacons to Enhance Lunar Landing Autonomous Navigation Architectures. Master’s Thesis, Polytechnic University of Milan, Milan, Italy, April 2015. [Google Scholar]
- Davis, J.L.; Striepe, S.A.; Maddock, R.W.; Hines, G.D.; Johnson, A.E. Advances in POST2 End-to-End Descent and Landing Simulation for the ALHAT Project. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference & Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Christensen, D.; Geller, D. Terrain-Relative and beacon-relative navigation for lunar powered descent and landing. J. Astronaut. Sci. 2011, 58, 121–151. [Google Scholar] [CrossRef] [Green Version]
- Pastor, P.R.R.; Gay, R.; Striepe, S.; Bishop, R. Mars Entry Navigation from EKF Processing of Beacon Data. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar]
- Yu, Z.; Cui, P.; Zhu, S. Observability-based beacon configuration optimization for Mars entry navigation. J. Guid. Control Dyn. 2015, 38, 643–650. [Google Scholar] [CrossRef]
- Zhao, Z.; Yu, Z.; Cui, P. A beacon configuration optimization method based on Fisher information for Mars atmospheric entry. Acta Astronaut. 2017, 133, 467–475. [Google Scholar] [CrossRef]
- Theil, S.; Bora, L. Beacons for supporting lunar landing navigation. CEAS Space J. 2017, 9, 77–95. [Google Scholar] [CrossRef] [Green Version]
- Zhao, T.; Wenying, L.; Wu, Z. High-precision navigation nethod for Lunar landing based on radio Beacons/IMU. In Proceedings of the 9th China Satellite Navigation Conference, Harbin, China, 23–25 May 2018. [Google Scholar]
- Heise, D.T.S.G.; Steffes, S.R.; Theil, S. Filter design for small integrated navigator for planetary exploration. In Proceedings of the 61th Deutscher Luft- und Raumfahrtkongress, Berlin, Germany, 10–12 September 2012; Deutsche Gesellschaft für Luft- und Raumfahrt: Berlin, Germany, 2012. [Google Scholar]
- Yu, Z.; Cui, P.; Zhu, S. On the observability of Mars entry navigation using radiometric measurements. Adv. Space Res. 2014, 54, 1513–1524. [Google Scholar] [CrossRef]
- Wedler, A.; Hellerer, M.; Rebele, B.; Gmeiner, H.; Vodermayer, B.; Bellmann, T.; Barthelmes, S.; Rosta, R.; Lange, C.; Witte, L. ROBEX–Components and methods for the planetary exploration demonstration mission. In Proceedings of the 13th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), Noordwijk, The Netherlands, 11–13 May 2015; ESAWebsite: Cologne, Germany, 2015. [Google Scholar]
- Shuang, L.; Peng, Y. Radio beacons/IMU integrated navigation for Mars entry. Adv. Space Res. 2011, 47, 1265–1279. [Google Scholar]
- Jiang, X.; Li, S.; Huang, X. Radio/FADS/IMU integrated navigation for Mars entry. Adv. Space Res. 2018, 61, 1342–1358. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S.; Liu, Y.; Koller, D.; Ng, A.Y.; Ghahramani, Z.; Durrant-Whyte, H. Simultaneous localization and mapping with sparse extended information filters. Int. J. Rob. Res. 2004, 23, 693–716. [Google Scholar] [CrossRef]
- Paskin, M.A. Thin junction tree filters for simultaneous localization and mapping. In Proceedings of the International Joint Conference on Artificial Intelligence, Acapulco, Mexico, 9–15 August 2003; Available online: http://ai.stanford.edu/~paskin/pubs/Paskin2003a.pdf (accessed on 10 June 2020).
- Menegatti, E.; Danieletto, M.; Mina, M.; Pretto, A.; Bardella, A.; Zanconato, S.; Zanuttigh, P.; Zanella, A. Autonomous discovery, localization and recognition of smart objects through WSN and image features. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010; pp. 1653–1657. [Google Scholar]
- Boots, B.; Gordon, G. A spectral learning approach to range-only SLAM. In Proceedings of the International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; pp. 19–26. Available online: http://proceedings.mlr.press/v28/boots13.pdf (accessed on 5 May 2020).
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor wifi graphslam. In Proceedings of the 2011 IEEE international conference on robotics and automation, Shanghai, China, 9–13 May 2011; pp. 1038–1043. [Google Scholar]
- Torres-González, A.; Martinez-De Dios, J.R.; Ollero, A. Efficient robot-sensor network distributed SEIF range-only SLAM. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1319–1326. [Google Scholar]
- Herranz, F.; Llamazares, Á.; Molinos, E.; Ocaña, M. A comparison of SLAM algorithms with range only sensors. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4606–4611. [Google Scholar]
- Eustice, R.; Walter, M.; Leonard, J. Sparse extended information filters: Insights into sparsification. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3281–3288. [Google Scholar]
- Walter, M.; Hover, F.; Leonard, J. SLAM for ship hull inspection using exactly sparse extended information filters. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1463–1470. [Google Scholar]
- Wang, X.; Ma, L. Sparse extended information filter for feather-based SLAM. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 2290–2293. [Google Scholar]
- Zhang, H.; He, B.; Luan, N. Sparse Extended Information Filter for AUV SLAM: Insights into the Optimal Sparse Time. Appl. Mech. Mater. 2013, 427–429, 1670–1673. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, H.; He, B.; Yan, T.; Liu, Y. Autonomous Navigation Based on SEIF with Consistency Constraint for C-Ranger AUV. Math. Probl. Eng. 2015, 2015, 752360. [Google Scholar] [CrossRef] [Green Version]
- Walter, M.R.; Eustice, R.M.; Leonard, J.J. Exactly sparse extended information filters for feature-based SLAM. Int. J. Rob. Res. 2007, 26, 335–359. [Google Scholar] [CrossRef] [Green Version]
- Eustice, R.M.; Singh, H.; Leonard, J.J. Exactly Sparse Delayed-State Filters for View-Based SLAM. IEEE Trans. Rob. 2006, 22, 1100–1114. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Zhao, C. An improved SLAM algorithm with sparse extended information filters. Pattern Recognit. Artif. Intell. 2009, 22, 263–269. [Google Scholar]
- Shojaei, K.; Mohammad Shahri, A. Experimental study of iterated kalman filters for simultaneous localization and mapping of autonomous mobile robots. J. Intell. Inf. Syst. Theory Appl. 2011, 63, 575–594. [Google Scholar] [CrossRef]
- He, B.; Liu, Y.; Dong, D.; Shen, Y.; Yan, T.; Nian, R. Simultaneous localization and mapping with iterative sparse extended information filter for autonomous vehicles. Sensors 2015, 15, 19852–19879. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y.; Bogdan, M.W. Levenberg-Marquardt Training. In Industrial Electronics Handbook; CRC Press: Boca Raton, FL, USA, 2011; Chapter 12; pp. 1–15. [Google Scholar]
- Torres-González, A.; Martínez-de Dios, J.R.; Ollero, A. Robot-Beacon Distributed Range-Only SLAM for Resource-Constrained Operation. Sensors 2017, 17, 903. [Google Scholar] [CrossRef] [Green Version]
- Torres-González, A.; Martinez-de Dios, J.R.; Ollero, A. Range-only SLAM for robot-sensor network cooperation. Auton. Robot. 2018, 42, 649–663. [Google Scholar] [CrossRef]
- Leonard, J.J.; Rikoski, R.J.; Newman, P.M.; Bosse, M. Mapping Partially Observable Features from Multiple Uncertain Vantage Points. Int. J. Rob. Res. 2002, 21, 943–976. [Google Scholar] [CrossRef]
- Zhou, Y. An efficient least-squares trilateration algorithm for mobile robot localization. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 3474–3479. [Google Scholar]
- Menegatti, E.; Zanella, A.; Zilli, S.; Zorzi, F.; Pagello, E. Range-only slam with a mobile robot and a wireless sensor networks. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 8–14. [Google Scholar]
- Olson, E.; Leonard, J.J.; Teller, S. Robust range-only beacon localization. IEEE J. Oceanic Eng. 2006, 31, 949–958. [Google Scholar] [CrossRef] [Green Version]
- Caballero, F.; Merino, L.; Maza, I.; Ollero, A. A particle filtering method for wireless sensor network localization with an aerial robot beacon. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 596–601. [Google Scholar]
- Blanco, J.L.; González, J.; Fernández-Madrigal, J.A. A pure probabilistic approach to range-only SLAM. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1436–1441. [Google Scholar]
- Yang, P. Efficient particle filter algorithm for ultrasonic sensor-based 2D range-only simultaneous localisation and mapping application. IET Wirel. Sens. Syst. 2012, 2, 394–401. [Google Scholar] [CrossRef]
- Wang, Z.M.; Du, Z.J. Simultaneous localization and mapping for mobile robot based on an improved particle filter algorithm. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1106–1110. [Google Scholar]
- Blanco, J.L.; Fernández-Madrigal, J.A.; González, J. Efficient probabilistic range-only SLAM. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1017–1022. [Google Scholar]
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Undelayed 3d RO-SLAM based on gaussian-mixture and reduced spherical parametrization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1555–1561. [Google Scholar]
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Robust range-only SLAM for aerial vehicles. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 750–755. [Google Scholar]
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Robust Range-Only SLAM for Unmanned Aerial Systems. J. Intell. Rob. Syst. 2016, 84, 297–310. [Google Scholar] [CrossRef]
- Geneve, L.; Kermorgant, O.; Laroche, E. A composite beacon initialization for EKF range-only SLAM. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1342–1348. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Stmpdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2007. [Google Scholar]
- Crassidis, J.L. Sigma-point Kalman filtering for integrated GPS and inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 750–756. [Google Scholar] [CrossRef]
- Madsen, K.; Nielsen, H.B.; Tingleff, O. Methods for Non-Linear least Squares Problems. 2004. Available online: https://orbit.dtu.dk/en/publications/methods-for-non-linear-least-squares-problems-2nd-ed (accessed on 24 April 2020).
- Nielsen, H.B. Damping Parameter in Marquardt’s Method; Technical Report 2; Technical University of Denmark: Copenhagen, Denmark, 2004. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beacon ID | Locations in (m) | Beacon ID | Locations in (m) |
|---|---|---|---|
| 1 | 2 | ||
| 3 | 4 | ||
| 5 | 6 | ||
| 7 | 8 | ||
| 9 | 10 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Accelerometer bias level | Gyro bias level | ||
| Accelerometer random walk | Gyro random walk | ||
| Accelerometer white noise | Gyro white noise | ||
| Beacon range noise | Altimeter range noise |
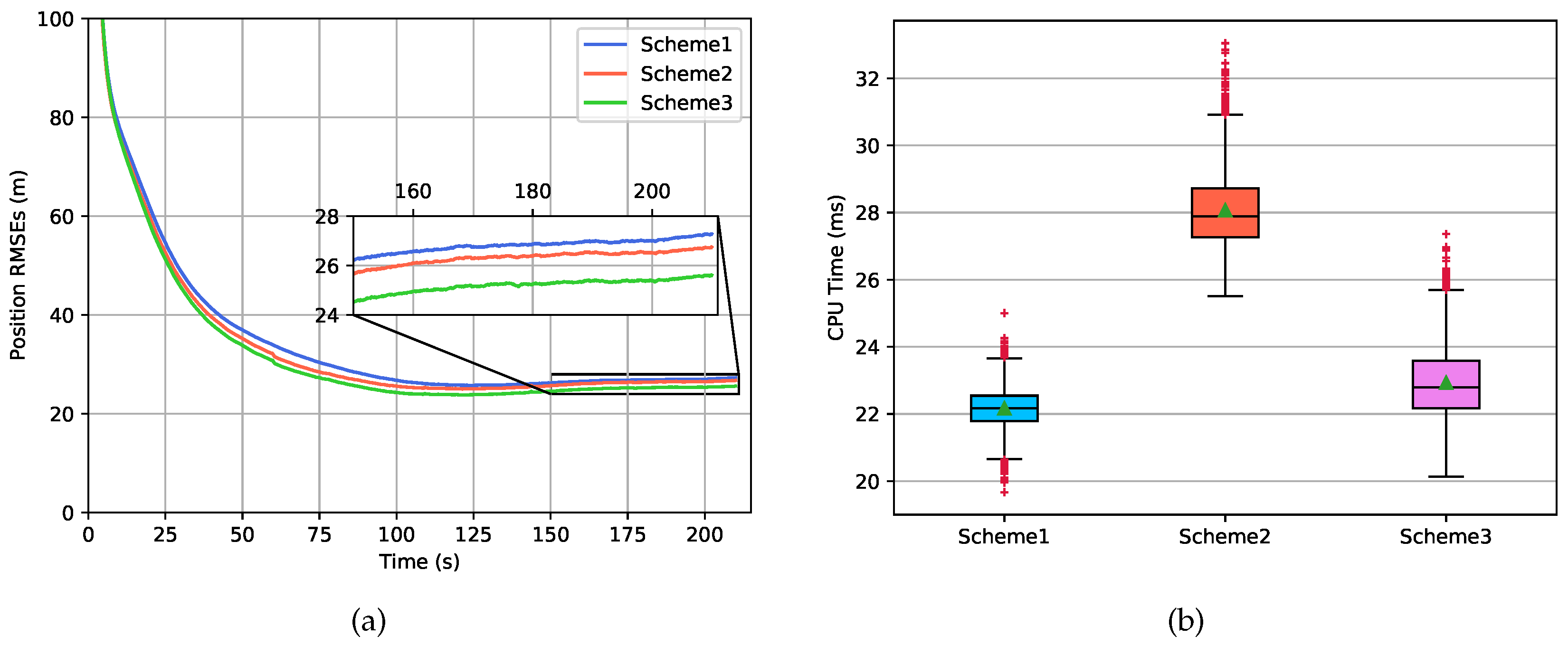
| Algorithm | Position Averaged RMSE (ARMSE) (m) | Velocity ARMSE (m/s) | CPU Times (ms) |
|---|---|---|---|
| Scheme 1 | 29.71 | 2.69 | 20.26 |
| Scheme 2 | 28.60 | 2.75 | 26.06 |
| Scheme 3 | 27.30 | 2.68 | 20.93 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, R.; Li, Y.; Luo, R.; Su, B.; Shan, Y. A Distributed Radio Beacon/IMU/Altimeter Integrated Localization Scheme with Uncertain Initial Beacon Locations for Lunar Pinpoint Landing. Sensors 2020, 20, 5643. https://doi.org/10.3390/s20195643
Mu R, Li Y, Luo R, Su B, Shan Y. A Distributed Radio Beacon/IMU/Altimeter Integrated Localization Scheme with Uncertain Initial Beacon Locations for Lunar Pinpoint Landing. Sensors. 2020; 20(19):5643. https://doi.org/10.3390/s20195643
Chicago/Turabian StyleMu, Rongjun, Yuntian Li, Rubin Luo, Bingzhi Su, and Yongzhi Shan. 2020. "A Distributed Radio Beacon/IMU/Altimeter Integrated Localization Scheme with Uncertain Initial Beacon Locations for Lunar Pinpoint Landing" Sensors 20, no. 19: 5643. https://doi.org/10.3390/s20195643