Remote Monitoring of Human Vital Signs Based on 77-GHz mm-Wave FMCW Radar


Abstract
:1. Introduction
- (1)
- By briefly introducing the principle of FMCW radar, we induce the closed-form expression of the measurement accuracy of human heartbeat and respiration detection. In addition, the range determination of human body in the radar field of view and the vibration FFT of breathing and heartbeat are expounded.
- (2)
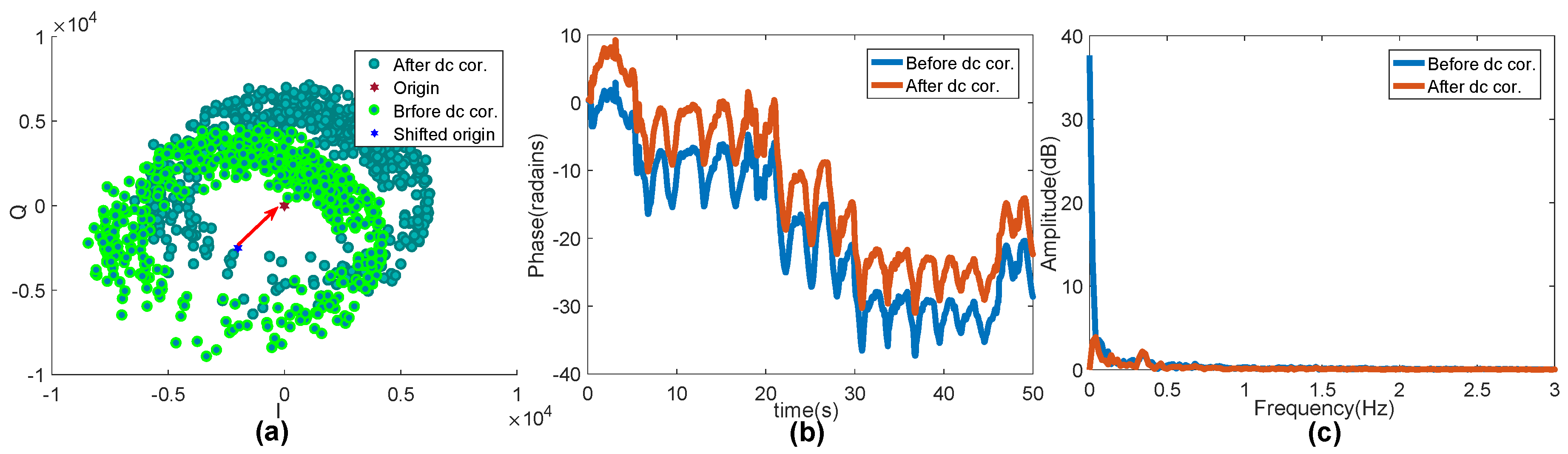
- The circular center dynamic tracking algorithm is applied to correct the DC offset. Then, the extended differential and cross-multiply (DACM) is applied for phase unwrapping to obtain correct phase change information of breathing and heartbeat signals, and the phase signal is further differentially enhanced.
- (3)
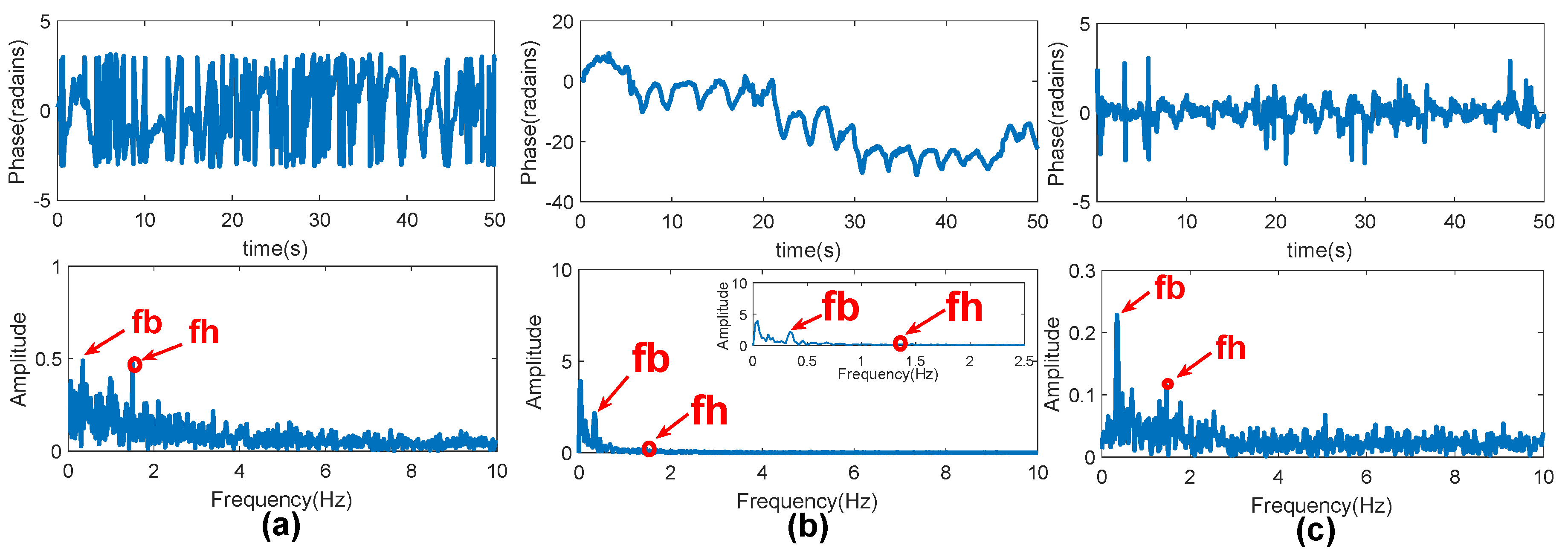
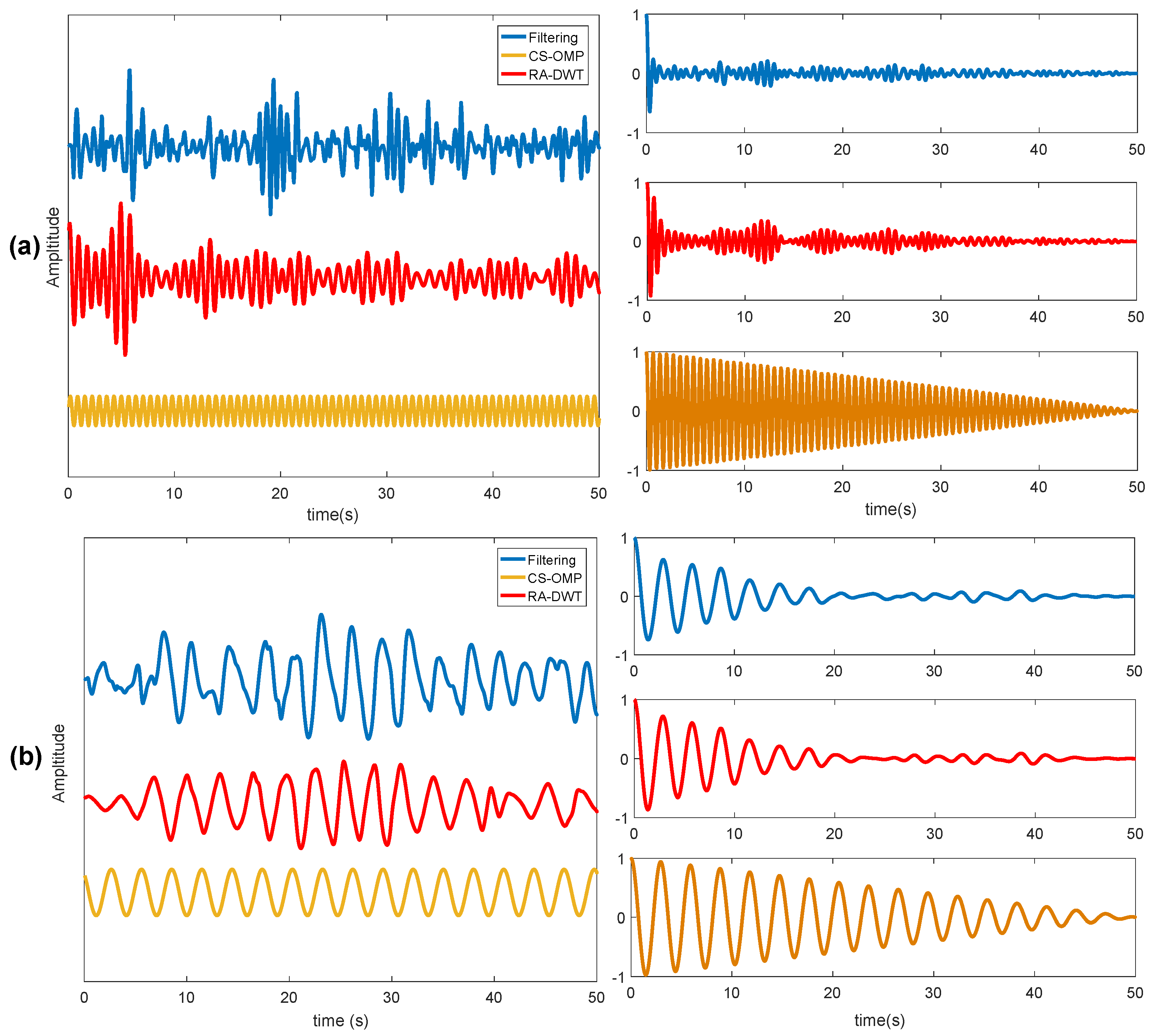
- We propose two methods, compressive sensing based on orthogonal matching pursuit (CS-OMP) and rigrsure adaptive soft threshold noise reduction based on discrete wavelet transform (RA-DWT), to separate and reconstruct the heartbeat and respiratory signals, and obtain interference-suppressed heartbeat and respiratory signals. Then, the two methods, namely frequency FFT algorithm and time domain autocorrelation algorithm, are presented to calculate the heartbeat and respiratory rates.
- (4)
- To verify the effectiveness of the proposed algorithms, the obtained heartbeat rate and respiration rate are respectively compared with the two contact-based sensors (smart bracelet Mi 3 and airflow sensors). The results show that the proposed CS-OMP and RA-DWT algorithms effectively suppress the harmonics and interference, and greatly improve the detection accuracy of heartbeat rate and respiratory rate.
2. Theory of FMCW Radar
3. Proposed Algorithm
3.1. Overview
3.2. Target Detection
3.3. Phase Extraction
3.4. Signal Separation and Reconstruction
3.4.1. CS-OMP Algorithm
| Algorithm 1. CS-OMP algorithm for breathing signal. |
| Input: perception matrix , Observation vector y, Signal spectrum peak frequency , and the noise boundary . |
| Output: 1-sparse reconstructed signal for x, . |
|
3.4.2. RA-DWT Algorithm
3.5. Estimation of Respiration and Heartbeat Rates
4. Experimental Results and Discussion
4.1. Experimental Parameters
4.2. Experimental Results
4.2.1. Target Detection
4.2.2. Phase Extraction of Heartbeat and Breathing
4.2.3. Separation and Reconstruction of Heartbeat and Breathing Signals
4.3. Performance Comparison
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shafiq, G.; Veluvolu, K.C. Surface chest motion decomposition for cardiovascular monitoring. Sci. Rep. 2014, 4, 5093. [Google Scholar] [CrossRef] [Green Version]
- Kwak, Y.H.; Kim, W.; Park, K.B.; Kim, K.; Seo, S. Flexible heartbeat sensor for wearable device. Biosens. Bioelectron. 2017, 94, 250–255. [Google Scholar] [CrossRef] [PubMed]
- Yamashita, S. Biological Signal Detection Electrode and Biological Signal Detection Apparatus. U.S. Patent 8,620,401, 31 December 2013. [Google Scholar]
- Chen, K.M.; Huang, Y.; Zhang, J.; Norman, A. Microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Lin, J.; Xiao, Y. Robust overnight monitoring of human vital signs by a non-contact respiration and heartbeat detector. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 2235–2238. [Google Scholar]
- Liu, Y.; Weisberg, R.H.; Merz, C. Assessment of CODAR Seasonde and WERA HF Radars in Mapping Surface Currents on the West Florida Shelf. J. Atmos. Ocean. Technol. 2014, 31, 1363–1382. [Google Scholar] [CrossRef]
- Zhao, C.; Zezong, C.; He, C.; Xie, F.; Chen, X.; Mou, C. Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array. Remote. Sens. 2018, 10, 184. [Google Scholar] [CrossRef] [Green Version]
- Wyatt, L.R. Use of HF radar for marine renewable applications. In Proceedings of the 2012 Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–5. [Google Scholar]
- Yavari, E.; Jou, H.; Lubecke, V.; Boric-Lubecke, O. Doppler radar sensor for occupancy monitoring. In Proceedings of the 2013 IEEE Topical Conference on Power Amplifiers for Wireless and Radio Applications, Santa Clara, CA, USA, 20 January 2013; pp. 145–147. [Google Scholar]
- Yavari, E.; Song, C.; Lubecke, V.; Boric-Lubecke, O. Is there anybody in there?: Intelligent radar occupancy sensors. IEEE Microw. Mag. 2014, 15, 57–64. [Google Scholar] [CrossRef]
- Wang, F.K.; Tang, M.C.; Chiu, Y.C.; Horng, T.S. Gesture sensing using retransmitted wireless communication signals based on Doppler radar technology. IEEE Trans. Microw. Theory Tech. 2015, 63, 4592–4602. [Google Scholar] [CrossRef]
- Liu, C.; Gu, C.; Li, C. Non-contact hand interaction with smart phones using the wireless power transfer features. In Proceedings of the 2015 IEEE Radio and Wireless Symposium (RWS), San Diego, CA, USA, 25–28 January 2015; pp. 20–22. [Google Scholar]
- Hosseini, S.A.T.; Amindavar, H. UWB radar signal processing in measurement of heartbeat features. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 1004–1007. [Google Scholar]
- Li, J.; Zeng, Z.; Sun, J.; Liu, F. Through-Wall Detection of Human Being’s Movement by UWB Radar. IEEE Geosci. Remote. Sens. Lett. 2012, 9, 1079–1083. [Google Scholar] [CrossRef]
- Li, C.; Lubecke, V.M.; Boric-Lubecke, O.; Lin, J. A review on recent advances in Doppler radar sensors for noncontact healthcare monitoring. IEEE Trans. Microw. Theory Tech. 2013, 61, 2046–2060. [Google Scholar] [CrossRef]
- Dong, S.; Zhang, Y.; Ma, C.; Zhu, C.; Gu, Z.; Lv, Q.; Zhang, B.; Li, C.; Ran, L. Doppler Cardiogram: A Remote Detection of Human Heart Activities. IEEE Trans. Microw. Theory Tech. 2019, 68, 1132–1141. [Google Scholar] [CrossRef]
- Anghel, A.; Vasile, G.; Cacoveanu, R.; Ioana, C.; Ciochina, S. Short-range wideband FMCW radar for millimetric displacement measurements. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5633–5642. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; O’Young, S. Method of doubling range resolution without increasing bandwidth in FMCW radar. Electron. Lett. 2015, 51, 933–935. [Google Scholar] [CrossRef]
- Sharpe, S.M.; Seals, J.; MacDonald, A.H.; Crowgey, S.R. Non-Contact Vital Signs Monitor. U.S. Patent 4,958,638, 25 September 1990. [Google Scholar]
- Zhang, D.; Kurata, M.; Inaba, T. FMCW radar for small displacement detection of vital signal using projection matrix method. Int. J. Antennas Propag. 2013, 2013, 571986. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Kim, B.H.; Park, J.K.; Yook, J.G. A Novel Vital-Sign Sensing Algorithm for Multiple Subjects Based on 24-GHz FMCW Doppler Radar. Remote Sens. 2019, 11, 1237. [Google Scholar] [CrossRef] [Green Version]
- Anitori, L.; de Jong, A.; Nennie, F. FMCW radar for life-sign detection. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6. [Google Scholar]
- Gu, C.; Wang, G.; Inoue, T.; Li, C. Doppler radar vital sign detection with random body movement cancellation based on adaptive phase compensation. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; pp. 1–3. [Google Scholar]
- Ahmad, A.; Roh, J.C.; Wang, D.; Dubey, A. Vital signs monitoring of multiple people using a FMCW millimeter-wave sensor. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1450–1455. [Google Scholar]
- Alizadeh, M.; Shaker, G.; De Almeida, J.C.M.; Morita, P.P.; Safavi-Naeini, S. Remote monitoring of human vital signs using mm-wave FMCW radar. IEEE Access 2019, 7, 54958–54968. [Google Scholar] [CrossRef]
- Brooker, G.M. Understanding millimetre wave FMCW radars. In Proceedings of the 1st International Conference on Sensing Technology, Palmerston North, New Zealand, 21–23 November 2005; pp. 152–157. [Google Scholar]
- Budge, M.C.; Burt, M.P. Range correlation effects in radars. In Proceedings of the Record of the 1993 IEEE National Radar Conference, Lynnfield, MA, USA, 20–22 April 1993; pp. 212–216. [Google Scholar]
- Barrick, D.E. FM/CW Radar Signals and Digital Processing. Available online: http://www.codar.com/images/about/1973Barrick_FMCW.pdf (accessed on 20 May 2020).
- Ding, L.; Ali, M.; Patole, S.; Dabak, A. Vibration parameter estimation using FMCW radar. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2224–2228. [Google Scholar]
- Lv, Q.; Chen, L.; An, K.; Wang, J.; Li, H.; Ye, D.; Huangfu, J.; Li, C.; Ran, L. Doppler Vital Signs Detection in the Presence of Large-Scale Random Body Movements. IEEE Trans. Microw. Theory Tech. 2018, 66, 4261–4270. [Google Scholar] [CrossRef]
- Park, B.K.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent demodulation with DC offset compensation in quadrature Doppler radar receiver systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1079. [Google Scholar] [CrossRef]
- Lv, Q.; Ye, D.; Qiao, S.; Salamin, Y.; Huangfu, J.; Li, C.; Ran, L. High dynamic-range motion imaging based on linearized Doppler radar sensor. IEEE Trans. Microw. Theory Tech. 2014, 62, 1837–1846. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory. 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Wassell, I. Energy efficient signal acquisition via compressive sensing in wireless sensor networks. In Proceedings of the 2011 6th International Symposium on Wireless and Pervasive Computing (ISWPC), Hong Kong, China, 23–25 February 2011; Volume 2325, p. 16. [Google Scholar]
- Tsaig, Y.; Donoho, D.L. Extensions of compressed sensing. Signal Process. 2006, 86, 549–571. [Google Scholar] [CrossRef]
- Sun, H.; Ni, L. Compressed sensing data reconstruction using adaptive generalized orthogonal matching pursuit algorithm. In Proceedings of the 2013 3rd International Conference on Computer Science and Network Technology, Dalian, China, 12–13 October 2013; pp. 1102–1106. [Google Scholar]
- Soman, K. Insight into Wavelets: From Theory to Practice; PHI Learning Pvt. Ltd.: Delhi, India, 2010. [Google Scholar]
- Choi, C.H.; Park, J.H.; Lee, H.N.; Yang, J.R. Heartbeat detection using a Doppler radar sensor based on the scaling function of wavelet transform. Microw. Opt. Technol. Lett. 2019, 61, 1792–1796. [Google Scholar] [CrossRef]
- Valencia, D.; Orejuela, D.; Salazar, J.; Valencia, J. Comparison analysis between rigrsure, sqtwolog, heursure and minimaxi techniques using hard and soft thresholding methods. In Proceedings of the 2016 XXI Symposium on Signal Processing, Images and Artificial Vision (STSIVA), Bucaramanga, Colombia, 31 August–2 September 2016; pp. 1–5. [Google Scholar]
- AWR1642 Single-Chip 76-GHz to 81-GHz Automotive Radar Sensor Evaluation Module. Available online: http://www.ti.com/tool/AWR1642BOOST (accessed on 15 January 2020).
- DCA1000EVM Real-time Data-capture Adapter For Radar Sensing Evaluation Module. Available online: http://www.ti.com/tool/DCA1000EVM (accessed on 15 January 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | S | C | |||||
|---|---|---|---|---|---|---|---|
| Value | s | 50 ms | 70 MHz/s | 4 Msps | 20 Hz | 200 | 1000 |
| Parameter | Range (m) | Vibration Frequency (Hz) |
|---|---|---|
| Max | 6.7 | 10 |
| Min | 0.0335 | 0.020 |
| Decomposition Level | ||||
|---|---|---|---|---|
| 2 | 0.46 | - | 0.1217 | - |
| 3 | 0.46 | 1.78 | 0.2092 | 0.0614 |
| 4 | 0.46 | 1.46 | 0.4032 | 0.4155 |
| 5 | 0.28 | 1.3 | 0.3915 | 0.3868 |
| 6 | 0.14 | 0.34 | 0.3817 | 0.9229 |
| 7 | - | 0.14 | - | 0.5384 |
| Subjects | Mi 3 (Reference Heartbeat Rate) | AWR1642 Radar Sensor | |||||
|---|---|---|---|---|---|---|---|
| Filtering [25] | CS-OMP | RA-DWT | |||||
| FFT | Auto- Correlation | FFT | Auto- Correlation | FFT | Auto- Correlation | ||
| Male 1 | 88 | 92 | 85 | 92 | 92 | 87 | 85 |
| Male 2 | 77 | 85 | 75 | 73 | 73 | 79 | 77 |
| Male 3 | 74 | 80 | 79 | 74 | 74 | 75 | 74 |
| Male 4 | 60 | 75 | 65 | 58 | 58 | 60 | 58 |
| Male 5 | 67 | 80 | 77 | 65 | 65 | 65 | 62 |
| Female 1 | 81 | 97 | 83 | 83 | 83 | 82 | 80 |
| Female 2 | 71 | 82 | 76 | 78 | 78 | 75 | 73 |
| Female 3 | 85 | 93 | 88 | 87 | 87 | 89 | 82 |
| Female 4 | 73 | 86 | 82 | 72 | 72 | 70 | 70 |
| Female 5 | 82 | 95 | 90 | 80 | 80 | 85 | 83 |
| MSD (%) | - | 4.63 | 5.43 | 4.38 | 4.38 | 3.16 | 2.92 |
| PCC (%) | - | 88 | 86 | 95 | 95 | 97 | 97 |
| Subjects | Airflow Sensor (Reference Breathing Rate) | AWR1642 Radar Sensor | |||||
|---|---|---|---|---|---|---|---|
| Filtering [25] | CS-OMP | RA-DWT | |||||
| FFT | Auto- Correlation | FFT | Auto- Correlation | FFT | Auto- Correlation | ||
| Male 1 | 17 | 21 | 18 | 17 | 17 | 17 | 17 |
| Male 2 | 19 | 24 | 21 | 20 | 20 | 19 | 19 |
| Male 3 | 23 | 26 | 25 | 22 | 22 | 25 | 23 |
| Male 4 | 16 | 19 | 17 | 15 | 15 | 17 | 15 |
| Male 5 | 22 | 21 | 19 | 20 | 20 | 22 | 21 |
| Female 1 | 23 | 28 | 25 | 25 | 25 | 23 | 22 |
| Female 2 | 18 | 19 | 16 | 18 | 18 | 19 | 17 |
| Female 3 | 28 | 32 | 28 | 28 | 28 | 28 | 25 |
| Female 4 | 24 | 28 | 27 | 26 | 26 | 25 | 25 |
| Female 5 | 25 | 27 | 23 | 23 | 23 | 25 | 24 |
| MSD (%) | - | 7.70 | 9.43 | 6.78 | 6.78 | 3.21 | 5.09 |
| PCC (%) | - | 90 | 88 | 94 | 94 | 98 | 96 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, W.; Zhou, M.; Ren, A.; Tian, Z. Remote Monitoring of Human Vital Signs Based on 77-GHz mm-Wave FMCW Radar. Sensors 2020, 20, 2999. https://doi.org/10.3390/s20102999
Wang Y, Wang W, Zhou M, Ren A, Tian Z. Remote Monitoring of Human Vital Signs Based on 77-GHz mm-Wave FMCW Radar. Sensors. 2020; 20(10):2999. https://doi.org/10.3390/s20102999
Chicago/Turabian StyleWang, Yong, Wen Wang, Mu Zhou, Aihu Ren, and Zengshan Tian. 2020. "Remote Monitoring of Human Vital Signs Based on 77-GHz mm-Wave FMCW Radar" Sensors 20, no. 10: 2999. https://doi.org/10.3390/s20102999