A Survey of Marker-Less Tracking and Registration Techniques for Health & Environmental Applications to Augmented Reality and Ubiquitous Geospatial Information Systems


Abstract
:1. Introduction
- We need a fast method to identify the entity in the real world and refer to the corresponding object in the database.
- We need a precise 3D model of the environment in an offline step.
- We need a precise enough registration method to augment the virtual model to the physical entity.
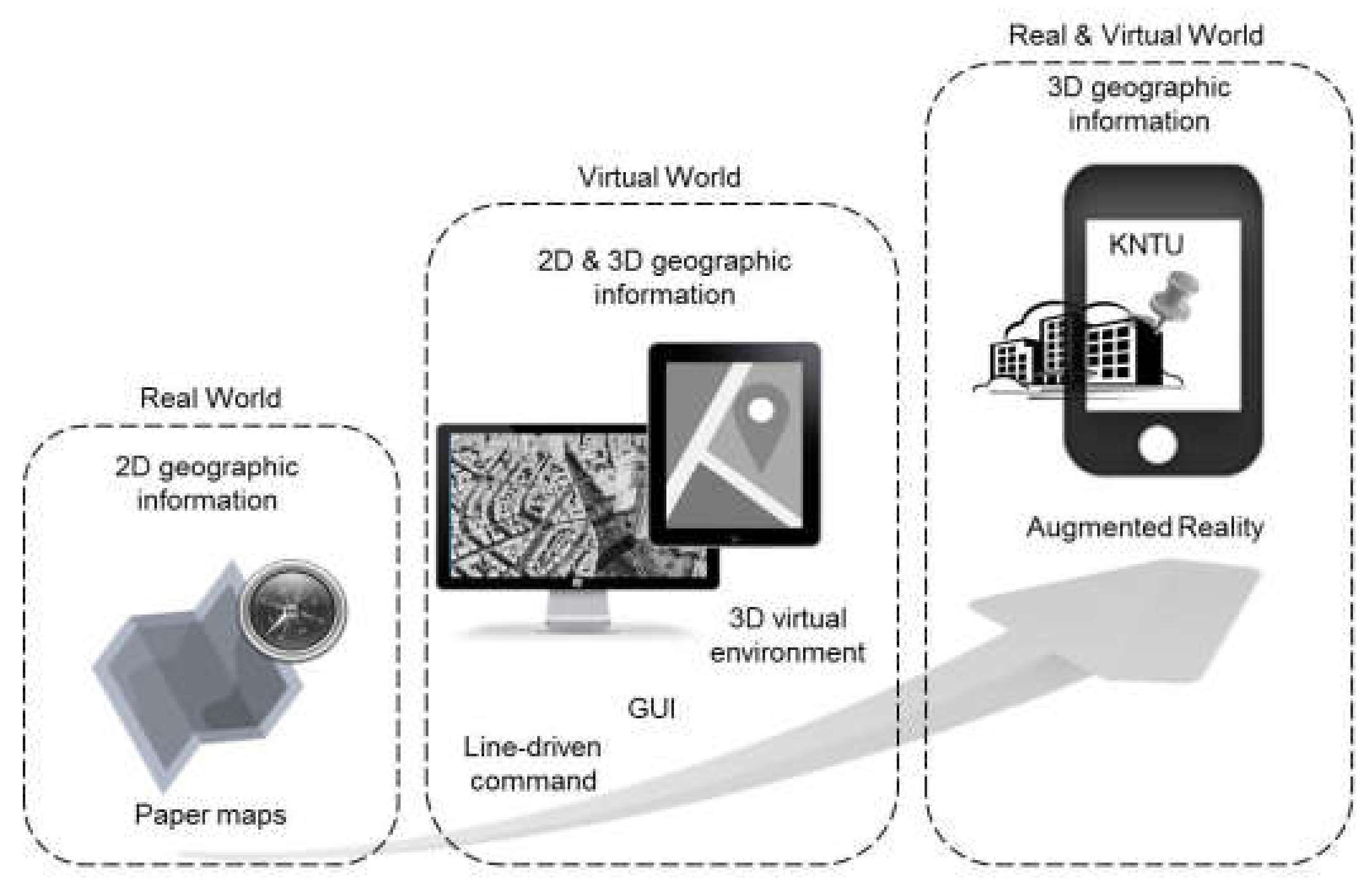
1.1. Evolution of GIS User Interfaces
1.2. AR Tracking and Registration
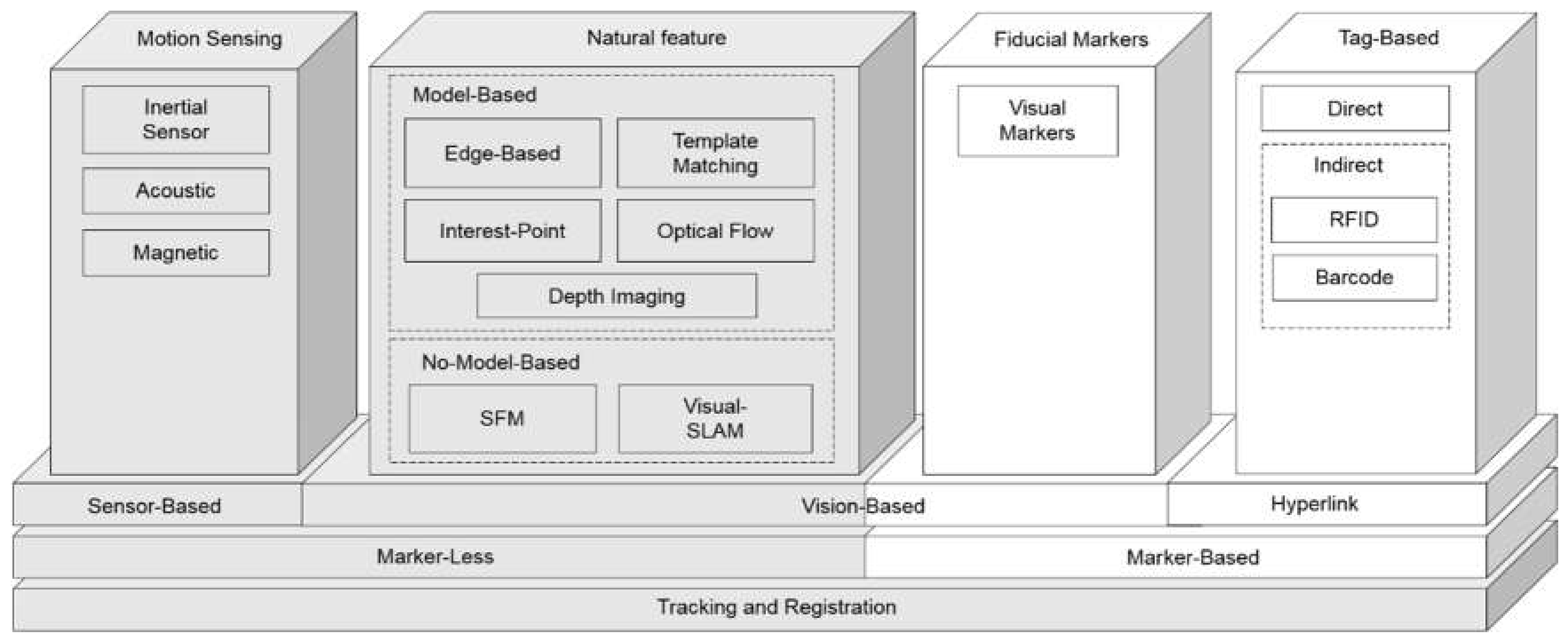
2. Marker-Less Techniques
2.1. Sensor-Based Techniques
2.1.1. Inertial Sensor Tracking
2.1.2. Acoustic Tracking
2.1.3. Magnetic Tracking
2.1.4. Sensor-Based Tracking and Registration Challenges
2.2. Vision-Based Tracking
2.2.1. Edge-Based Tracking
2.2.2. Interest-Point-Based Tracking
2.2.3. Template Matching
2.2.4. Optical Flow
2.2.5. Depth Imaging
2.2.6. No-Model-Based Tracking
2.2.7. Vision-Based Tracking and Registration Challenges
3. 3D Modeling
4. Critical Discussion
4.1. Hybrid Approach
4.2. Improvement Approaches
4.3. 3D Object Modelling Approach
5. Conclusions and Future Trends
Author Contributions
Funding
Conflicts of Interest
References
- King, G.R.; Piekarski, W.; Thomas, B.H. ARVino-Outdoor Augmented Reality Visualisation of Viticulture GIS Data. In Proceedings of the Fourth International Symposium on Mixed and Augmented Reality, Vienna, Austria, 5–7 October 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 52–55. [Google Scholar]
- Azuma, R.T. A survey of augmented reality. Presence Teleoper. Virtual Eviron. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Ratti, C.; Wang, Y.; Ishii, H.; Piper, B.; Frenchman, D. Tangible User Interfaces (TUIs): A novel paradigm for GIS. Trans. GIS 2004, 8, 407–421. [Google Scholar] [CrossRef]
- Bimber, O.; Raskar, R. Spatial Augmented Reality: Merging Real and Virtual Worlds; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Wagner, D.; Mulloni, A.; Langlotz, T.; Schmalstieg, D. Real-Time Panoramic Mapping and Tracking on Mobile Phones. In Proceedings of the IEEE Virtual Reality Conference (VR), Waltham, MA, USA, 20–24 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 211–218. [Google Scholar]
- Shah, K. Uhyperlink: An Organized Method to Collect, Manage and Store Object Hyperlinks Using Rfid. Available online: https://dalspace.library.dal.ca/handle/10222/15076 (accessed on 19 February 2020).
- Kindberg, T.; Barton, J.; Morgan, J.; Becker, G.; Caswell, D.; Debaty, P.; Gopal, G.; Frid, M.; Krishnan, V.; Morris, H. People, places, things: Web presence for the real world. Mob. Netw. Appl. 2002, 7, 365–376. [Google Scholar] [CrossRef]
- Shaer, O.; Hornecker, E. Tangible user interfaces: Past, present, and future directions. Found. Trends Hum. Comput. Interact. 2010, 3, 1–137. [Google Scholar] [CrossRef] [Green Version]
- Ong, S.K.; Yuan, M.; Nee, A.Y. Markerless augmented reality using a robust point transferring method. Lect. Notes Comput. Sci. 2007, 4352, 258. [Google Scholar]
- Siltanen, S. Theory and Applications of Marker-Based Augmented Reality; VTT: Espoo, Finland, 2012. [Google Scholar]
- Chia, K.W.; Cheok, A.D.; Prince, S.J. Online 6 DOF Augmented Reality Registration from Natural Features. In Proceedings of the 1st International Symposium on Mixed and Augmented Reality, Darmstadt, Germany, 1 October 2002; IEEE: Piscataway, NJ, USA, 2002; p. 305. [Google Scholar]
- Neri, R.B.; Lopez, G.M.; Barón, H.B.; Crespo, R.G. Annotation and visualization in android: An application for education and real time information. IJIMAI 2013, 2, 7–12. [Google Scholar]
- Robinson, S.; Eslambolchilar, P.; Jones, M. Exploring casual point-and-tilt interactions for mobile geo-blogging. Pers. Ubiquitous Comput. 2010, 14, 363–379. [Google Scholar] [CrossRef] [Green Version]
- Simon, R.; Fröhlich, P.; Anegg, H. Beyond Location Based—The Spatially Aware Mobile Phone. In Proceedings of the International Symposium on Web and Wireless Geographical Information Systems, Hong Kong, China, 4–5 December 2006; Springer Nature Switzerland AG: Basel, Switzerland, 2006; pp. 12–21. [Google Scholar]
- Comport, A.I.; Marchand, E.; Pressigout, M.; Chaumette, F. Real-time markerless tracking for augmented reality: The virtual visual servoing framework. IEEE Trans. Vis. Comput. Graph. 2006, 12, 615–628. [Google Scholar] [CrossRef] [Green Version]
- Gupta, P.; da Vitoria Lobo, N.; Laviola, J.J. Markerless tracking and gesture recognition using polar correlation of camera optical flow. Mach. Vis. Appl. 2013, 24, 651–666. [Google Scholar] [CrossRef]
- Takacs, G.; Chandrasekhar, V.; Gelfand, N.; Xiong, Y.; Chen, W.C.; Bismpigiannis, T.; Grzeszczuk, R.; Pulli, K.; Girod, B. Outdoors Augmented Reality on Mobile Phone using Loxel-Based Visual Feature Organization. In Proceedings of the 1st ACM International Conference on Multimedia Information Retrieval, Vancouver, BC, Canada, 30–31 October 2008; Association for Computer Machinery: New York, NY, USA, 2008; pp. 427–434. [Google Scholar]
- Benser, E.T. Trends in Inertial Sensors and Applications. In Proceedings of the International Symposium on Inertial Sensors and Systems (ISISS), Hapuna Beach, HI, USA, 23–26 March 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. [Google Scholar]
- Zlatanova, S. Augmented Reality Technology; GISt Report No. 17; TU Delft: Delft, The Netherlands, 2002; p. 72. [Google Scholar]
- Abyarjoo, F.; Barreto, A.; Cofino, J.; Ortega, F.R. Implementing a Sensor Fusion Algorithm for 3d Orientation Detection with Inertial/Magnetic Sensors. In Innovations and Advances in Computing, Informatics, Systems Sciences, Networking and Engineering; Springer International Publishing: New York, NY, USA, 2015; pp. 305–310. [Google Scholar]
- Shaeffer, D.K. Mems inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Erdem, A.T.; Ercan, A.Ö. Fusing inertial sensor data in an extended Kalman filter for 3D camera tracking. IEEE Trans. Image Process. 2015, 24, 538–548. [Google Scholar] [CrossRef] [PubMed]
- Jatesiktat, P.; Anopas, D.; Ang, W.T. Personalized Markerless Upper-Body Tracking with a Depth Camera and Wrist-Worn Inertial Measurement Units. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Valencia-Jimenez, N.; Leal-Junior, A.; Avellar, L.; Vargas-Valencia, L.; Caicedo-Rodríguez, P.; Ramírez-Duque, A.A.; Lyra, M.; Marques, C.; Bastos, T.; Frizera, A. A Comparative Study of Markerless Systems Based on Color-Depth Cameras, Polymer Optical Fiber Curvature Sensors, and Inertial Measurement Units: Towards Increasing the Accuracy in Joint Angle Estimation. Electronics 2019, 8, 173. [Google Scholar] [CrossRef] [Green Version]
- Girard, G.; Côté, S.; Zlatanova, S.; Barette, Y.; St-Pierre, J.; Van Oosterom, P. Indoor pedestrian navigation using foot-mounted imu and portable ultrasound range sensors. Sensors 2011, 11, 7606–7624. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Walpola, M.; Roelant, D.; Zhu, H.; Yen, K. Self-organization of unattended wireless acoustic sensor networks for ground target tracking. Perv. Mobile Comput. 2009, 5, 148–164. [Google Scholar] [CrossRef]
- Kułakowski, P.; Vales-Alonso, J.; Egea-López, E.; Ludwin, W.; García-Haro, J. Angle-of-arrival localization based on antenna arrays for wireless sensor networks. Comput. Electr. Eng. 2010, 36, 1181–1186. [Google Scholar] [CrossRef]
- Tiponuţ, V.; Gacsádi, A.; Ţepelea, L.; Lar, C.; Gavriluţ, I. Integrated Environment for Assisted Movement of Visually Impaired. In Proceedings of the 15th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD), Balatonfured, Hungary, 15–17 June 2006; pp. 15–17. [Google Scholar]
- Tai, T.C.; Lin, K.C.J.; Tseng, Y.C. Toward Reliable Localization by Unequal AoA Tracking. In Proceedings of the 17th Annual International Conference on Mobile Systems, Applications, and Services, Seoul, Korea, 17–21 June 2019; Association for Computer Machinery: New York, NY, USA, 2019; pp. 444–456. [Google Scholar]
- Carotenuto, R.; Merenda, M.; Iero, D.; G. Della Corte, F. Mobile Synchronization Recovery for Ultrasonic Indoor Positioning. Sensors 2020, 20, 702. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Michelena, M. Small magnetic sensors for space applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef]
- Ripka, P.; Tipek, A. Modern Sensors Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Marshall, J. Magnetic field swimmer positioning. IEEE Sens. J. 2015, 15, 172–179. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Qiao, W.; Li, B.; Hu, C.; Ren, H.; Meng, M.Q.H. An efficient magnetic tracking method using uniaxial sensing coil. IEEE Trans. Magn. 2014, 50, 1–7. [Google Scholar] [CrossRef]
- Ma, L.; Zhao, Z.; Zhang, B.; Jiang, W.; Fu, L.; Zhang, X.; Liao, H. Three-dimensional augmented reality surgical navigation with hybrid optical and electromagnetic tracking for distal intramedullary nail interlocking. Int. J. Med. Robot. Comput. Assist. Surg. 2018, 14, e1909. [Google Scholar] [CrossRef]
- Tang, R.; Ma, L.F.; Rong, Z.X.; Li, M.D.; Zeng, J.P.; Wang, X.D.; Liao, H.E.; Dong, J.H. Augmented reality technology for preoperative planning and intraoperative navigation during hepatobiliary surgery: A review of current methods. Hepatobil. Pancreat. Dis. Int. 2018, 17, 101–112. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Lee, Y.; Cha, S.; Choi, C.; Lee, S. Development of a network rtk positioning and gravity-surveying application with gravity correction using a smartphone. Sensors 2013, 13, 8879–8894. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, Glonass, Galileo and Beidou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Fröhlich, P.; Baldauf, M.; Reichl, P.; Tobler, R. Visual Presentation Challenges for Mobile Spatial Applications: Three Case Studies. In Proceedings of the 12th International Conference on Information Visualisation, London, UK, 9–11 July 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 533–538. [Google Scholar]
- Boulos, M.N.K.; Blanchard, B.J.; Walker, C.; Montero, J.; Tripathy, A.; Gutierrez-Osuna, R. Web gis in practice x: A microsoft kinect natural user interface for google earth navigation. Int. J. Health Geogr. 2011, 10, 45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Larnaout, D.; Gay-Bellile, V.; Bourgeois, S.; Dhome, M. Vehicle 6-Dof Localization Based on Slam Constrained by GPS And Digital Elevation Model Information. In Proceedings of the International Conference on Image Processing (ICIP), Melbourne, Australia, 15–18 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2504–2508. [Google Scholar]
- Montiel, J.; Davison, A.J. A Visual Compass Based on Slam. In Proceedings of the International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1917–1922. [Google Scholar]
- Zhang, R.; Hoflinger, F.; Reindl, L. Inertial sensor based indoor localization and monitoring system for emergency responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies; ETH Zurich: Zurich, Switzerland, 2012. [Google Scholar]
- Colleu, T.; Sourimant, G.; Morin, L. Automatic Initialization for The Registration of GIS and Video Data. In Proceedings of the 3DTV Conference: The True Vision-Capture, Transmission and Display of 3D Video, Istanbul, Turkey, 28–30 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 49–52. [Google Scholar]
- Bioret, N.; Servières, M.; Moreau, G. Urban Localization Based on Correspondences Between Street Photographs and 2D Building GIS Layer. Available online: https://www.researchgate.net/profile/Myriam_Servieres/publication/245031405_Urban_Localization_based_on_Correspondences_between_Street_Photographs_and_2D_Building_GIS_Layer/links/0046353a403b1975aa000000.pdf (accessed on 19 February 2020).
- Reitmayr, G.; Drummond, T. Going Out: Robust Model-Based Tracking for Outdoor Augmented Reality. In Proceedings of the 5th IEEE and ACM International Symposium on Mixed and Augmented Reality, Santa Barbara, CA, USA, 22–25 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 109–118. [Google Scholar]
- Maierhofer, S.; Simon, R.; Tobler, R.F. Simplified Guided Visibility Sampling for Location Based Services. Available online: http://www.realcorp.at/archive/corp2007_MAIERHOFER.pdf (accessed on 19 February 2020).
- Höllerer, T.; Feiner, S.; Terauchi, T.; Rashid, G.; Hallaway, D. Exploring mars: Developing indoor and outdoor user interfaces to a mobile augmented reality system. Comput. Graph. 1999, 23, 779–785. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Harris, C.; Stennett, C. Rapid-A Video Rate Object Tracker. In Proceedings of the British Machine Conference; BMVC Press: Manchester, UK, 1990; pp. 1–6. [Google Scholar]
- Zhu, S.; Morin, L.; Pressigout, M.; Moreau, G.; Servieres, M. Video/GIS Registration System Based on Skyline Matching Method. In Proceedings of the IEEE Conference on Image Processing (ICIP), Melbourne, Australia, 15–18 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 3632–3636. [Google Scholar]
- Rother, C. A new approach to vanishing point detection in architectural environments. Image Vis. Comput. 2002, 20, 647–655. [Google Scholar] [CrossRef]
- Derpanis, K.G. Overview of the ransac algorithm. Image Rochester NY 2010, 4, 2–3. [Google Scholar]
- Guo, Y.; Qingyun, Y.L.; Zhang, W.; Xu, L. Application of augmented reality GIS in architecture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 331–336. [Google Scholar]
- Bird, J.; Arden, D. Indoor navigation with foot-mounted strapdown inertial navigation and magnetic sensors [emerging opportunities for localization and tracking]. IEEE Wirel. Commun. 2011, 18, 28–35. [Google Scholar] [CrossRef]
- Larnaout, D.; Bourgeois, S.; Gay-Bellile, V.; Dhome, M. Towards Bundle Adjustment with GIS Constraints for Online Geo-Localization of a Vehicle in Urban Center. In Proceedings of the Second International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Zurich, Switzerland, 13–15 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 348–355. [Google Scholar]
- Henry, D.; Yao, Y.; Fulton, R.; Kyme, A. An Optimized Feature Detector for Markerless Motion Tracking in Motion-Compensated Neuroimaging. In Proceedings of the IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Atlanta, GA, USA, 21–28 October 2008; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Tan, S.Y.; Arshad, H.; Abdullah, A. Distinctive accuracy measurement of binary descriptors in mobile augmented reality. PLoS ONE 2019, 14, e0207191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Lei, T.; Zhao, C.; Huang, J.; Yuan, M.; Wang, J. Research on Improved Image Registration Algorithm Based on PROSAC Algorithm. In Proceedings of the Eleventh International Conference on Digital Image Processing (ICDIP 2019), Guangzhou, China, 10–13 May 2019; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; p. 111792K. [Google Scholar]
- Jiao, J.; Wang, X.; Deng, Z.; Cao, J.; Tang, W. A fast template matching algorithm based on principal orientation difference. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418778223. [Google Scholar] [CrossRef] [Green Version]
- Fleet, D.; Weiss, Y. Optical Flow Estimation. In Handbook of Mathematical Models in Computer Vision; Springer: New York, NY, USA, 2006; pp. 237–257. [Google Scholar]
- Xie, W.; Liang, Y.; Johnson, J.; Mower, A.; Burns, S.; Chelini, C.; Alessandro, P.D.; Weibel, N.; Schulze, J.P. Interactive multi-user 3D visual analytics in augmented reality. arXiv 2020, arXiv:2002.05305. [Google Scholar]
- Moun, C.; Netramai, C. Localization and Building Identification in Outdoor Environment for Smartphone Using Integrated GPS And Camera. In Proceedings of the Fourth International Conference on Digital Information and Communication Technology and Its Applications (DICTAP), Bangkok, Thailand, 6–8 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 327–332. [Google Scholar]
- Bae, H.; Golparvar-Fard, M.; White, J. High-precision vision-based mobile augmented reality system for context-aware architectural, engineering, construction and facility management (aec/fm) applications. Vis. Eng. 2013, 1, 3. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zheng, Y.; Killeen, B.; Ishii, M.; Hager, G.D.; Taylor, R.H.; Unberath, M. Extremely Dense Point Correspondences using a Learned Feature Descriptor. arXiv 2003, arXiv:00619 2020. [Google Scholar]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (slam): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.Z.; Corso, N.; Turner, E.; Zakhor, A. Image Based Localization in Indoor Environments. In Proceedings of the Fourth International Conference on Computing for Geospatial Research and Application (COM. Geo), San Jose, CA, USA, 22–24 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 70–75. [Google Scholar]
- Balasundaram, A.; Ashok Kumar, S.; Magesh Kumar, S. Optical Flow Based Object Movement Tracking. Int. J. Eng. Adv. Technol. (IJERT) 2019, 9, 3913–3916. [Google Scholar]
- Yuan, M.; Ong, S.K.; Nee, A.Y. Registration using natural features for augmented reality systems. IEEE Trans. Vis. Comput. Graph. 2006, 12, 569–580. [Google Scholar] [CrossRef]
- Kahn, S.; Kuijper, A. Fusing Real-Time Depth Imaging with High Precision Pose Estimation by a Measurement Arm. In Proceedings of the International Conference on Cyberworlds (CW), Darmstadt, Germany, 25–27 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 256–260. [Google Scholar]
- Xiang, S.; Yu, L.; Yang, Y.; Liu, Q.; Zhou, J. Interfered depth map recovery with texture guidance for multiple structured light depth cameras. Signal. Process. Image Commun. 2015, 31, 34–46. [Google Scholar] [CrossRef]
- Pauwels, K.; Rubio, L.; Ros, E. Real-time pose detection and tracking of hundreds of objects. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 2200–2214. [Google Scholar] [CrossRef]
- Hansard, M.; Lee, S.; Choi, O.; Horaud, R.P. Time-of-Flight Cameras: Principles, Methods and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Sun, K. Six Degrees of Freedom Object Pose Estimation with Fusion Data from a Time-Of-Flight Camera and a Color Camera. Ph.D. Thesis, Julius Maximilian University of Würzburg, Würzburg, Germany, 2014. [Google Scholar]
- Sarbolandi, H.; Lefloch, D.; Kolb, A. Kinect range sensing: Structured-light versus time-of-flight kinect. Comput. Vis. Image Underst. 2015, 139, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.; Liu, H.; Dong, Z.; Zhang, G.; Bao, H. Robust Monocular Slam in Dynamic Environments. In Proceedings of the Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 209–218. [Google Scholar]
- Rokhsaritalemi, S.; Sadeghi-Niaraki, A.; Choi, S.M. A Review on Mixed Reality: Current Trends, Challenges and Prospects. Appl. Sci. 2020, 10, 636. [Google Scholar] [CrossRef] [Green Version]
- Adam, N.; Purnamasari, D.; Ibrahim, A. Implementation of Object Tracking Augmented Reality Markerless using FAST Corner Detection on User Defined-Extended Target Tracking in Multivarious Intensities. J. Phys. Conf. Ser. 2019, 1201, 012041. [Google Scholar]
- Meinhold, R.J.; Singpurwalla, N.D. Understanding the kalman filter. Am. Stat. 1983, 37, 123–127. [Google Scholar]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In International Workshop on Vision Algorithms; Springer: Berlin/Heidelberg, Germany, 1999; pp. 298–372. [Google Scholar]
- Mouragnon, E.; Lhuillier, M.; Dhome, M.; Dekeyser, F.; Sayd, P. Real Time Localization and 3d Reconstruction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 363–370. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. Freak: Fast Retina Keypoint. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 510–517. [Google Scholar]
- Lothe, P.; Bourgeois, S.; Dekeyser, F.; Royer, E.; Dhome, M. Towards Geographical Referencing of Monocular Slam Reconstruction Using 3d City Models: Application to Real-Time Accurate Vision-Based Localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2882–2889. [Google Scholar]
- de Souza Cardoso, L.F.; Mariano, F.C.M.Q.; Zorzal, E.R. A survey of industrial augmented reality. Comput. Ind. Eng. 2020, 139, 106159. [Google Scholar] [CrossRef]
- Haag, M.; Nagel, H.H. Combination of edge element and optical flow estimates for 3d-model-based vehicle tracking in traffic image sequences. Int. J. Comput. Vis. 1999, 35, 295–319. [Google Scholar] [CrossRef]
- Sourimant, G.; Morin, L.; Bouatouch, K. GPS, GIS and Video Fusion for Urban Modeling. Available online: https://www.irisa.fr/temics/publis/2007/sourimant07a.pdf (accessed on 19 February 2020).
- de La Gorce, M.; Paragios, N.; Fleet, D.J. Model-Based Hand Tracking with Texture, Shading and Self-Occlusions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–8. [Google Scholar]
- Simon, G.; Fitzgibbon, A.W.; Zisserman, A. Markerless Tracking Using Planar Structures in The Scene. In Proceedings of the International Symposium on Augmented Reality (ISAR), Munich, Germany, 5–6 October 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 120–128. [Google Scholar]
- Fritz, G.; Seifert, C.; Paletta, L. A Mobile Vision System for Urban Detection with Informative Local Descriptors. In Proceedings of the IEEE International Conference on Computer Vision Systems, New York, NY, USA, 4–7 January 2006; IEEE: Piscataway, NJ, USA, 2006; p. 30. [Google Scholar]
- La Cascia, M.; Sclaroff, S.; Athitsos, V. Fast, reliable head tracking under varying illumination: An approach based on registration of texture-mapped 3d models. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 322–336. [Google Scholar] [CrossRef] [Green Version]
- Zlatanova, S.; Prosperi, D. Large-Scale 3D Data Integration: Challenges and Opportunities; CRC Press: Boca Ranton, FL, USA, 2005. [Google Scholar]
- Zlatanova, S.; Stoter, J.; Isikdag, U. Standards for Exchange and Storage of 3D Information: Challenges and Opportunities for Emergency Response. In Proceedings of the 4th International Conference on Cartography & GIS, Albena, Bulgaria, 18–22 June 2012; International Cartographic Association: Bern, Switzerland, 2012; Volume 2, pp. 17–28. [Google Scholar]
- Santana, J.M.; Wendel, J.; Trujillo, A.; Suárez, J.P.; Simons, A.; Koch, A. Multimodal Location Based Services—Semantic 3D City Data as Virtual and Augmented Reality. In Progress in Location-Based Services 2016; Springer: New York, NY, USA, 2017; pp. 329–353. [Google Scholar]
- Jo, D.; Kim, G.J. AR Enabled IoT for a Smart and Interactive Environment: A Survey and Future Directions. Sensors 2019, 19, 4330. [Google Scholar] [CrossRef] [Green Version]
- Afif, F.N.; Basori, A.H. Orientation control for indoor virtual landmarks based on hybrid-based markerless augmented reality. Procedia Soc. Behav. Sci. 2013, 97, 648–655. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Jonsson, T.; Seipel, S. Evaluation of Augmented Reality-Based Building Diagnostics Using Third Person Perspective. ISPRS Int. J. Geo. Inf. 2020, 9, 53. [Google Scholar] [CrossRef] [Green Version]
- Timmi, A.; Coates, G.; Fortin, K.; Ackland, D.; Bryant, A.L.; Gordon, I.; Pivonka, P. Accuracy of a novel marker tracking approach based on the low-cost Microsoft Kinect v2 sensor. Med. Eng. Phys. 2018, 59, 63–69. [Google Scholar] [CrossRef] [PubMed]
- Krishnammal, N.; Lakshmi, G.M. A Survey on Real Time 3-D Object Detection and Tracking Techniques for Marker-Less Augmented Reality. Int. J. Sci. Res. 2019, 8, 18111901. [Google Scholar]
- Bicho, D.; Girão, P.; Paulo, J.; Garrote, L.; Nunes, U.J.; Peixoto, P. Markerless Multi-View-based Multi-User Head Tracking System for Virtual Reality Applications. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2645–2652. [Google Scholar]
- Miezal, M.; Bleser, G.; Schmitz, N.; Stricker, D. A Generic Approach to Inertial Tracking of Arbitrary Kinematic Chains. In Proceedings of the 8th International Conference on Body Area Networks, Boston, MA, USA, 30 September–2 October 2013; ICST: Ghent, Belgium, 2013; pp. 189–192. [Google Scholar]
- Lachapelle, G.; Alves, P.; Fortes, L.P.; Cannon, M.E.; Townsend, B. DGPS RTK positioning using a reference network. In Proceedings of the ION-GPS, Salt Lake City, UT, USA, 19–22 September 2000; The Institute of Naviagation: Manassas, VA, USA, 2000; pp. 19–22. [Google Scholar]
- Larnaout, D.; Gay-Bellile, V.; Bourgeois, S.; Labbé, B.; Dhome, M. Fast and Automatic City-Scale Environment Modeling for an Accurate 6dof Vehicle Localization. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 265–266. [Google Scholar]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. A model-based 3d template matching technique for pose acquisition of an uncooperative space object. Sensors 2015, 15, 6360–6382. [Google Scholar] [CrossRef] [Green Version]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. Monoslam: Real-time single camera slam. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 679–698. [Google Scholar]
- Han, P.; Zhao, G. A review of edge-based 3D tracking of rigid objects. Virtual Real. Intell. Hardw. 2019, 1, 580–596. [Google Scholar] [CrossRef]
- Omerčević, D.; Leonardis, A. Hyperlinking reality via camera phones. Mach. Vis. Appl. 2011, 22, 521–534. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Computer Vision—ECCV 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 430–443. [Google Scholar]
- Wagner, D.; Reitmayr, G.; Mulloni, A.; Drummond, T.; Schmalstieg, D. Real-time detection and tracking for augmented reality on mobile phones. IEEE Trans. Vis. Comput. Graph. 2010, 16, 355–368. [Google Scholar] [CrossRef]
- Xiaokang, R.; Danling, C.; Jie, R.; Bianli, D. Research on Augmented Reality Method Based on Improved ORB Algorithm. J. Phys. Conf. Ser. 2020, 1453, 012024. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (surf). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Teichrieb, V.; do Monte Lima, J.P.S.; Apolinário, E.L.; de Farias, T.S.M.C.; Bueno, M.A.S.; Kelner, J.; Santos, I.H. A survey of online monocular markerless augmented reality. Int. J. Model. Simul. Petrol. Ind. 2007, 1, 1–7. [Google Scholar]
- Zollhöfer, M.; Nießner, M.; Izadi, S.; Rehmann, C.; Zach, C.; Fisher, M.; Wu, C.; Fitzgibbon, A.; Loop, C.; Theobalt, C. Real-time non-rigid reconstruction using an rgb-d camera. ACM Trans. Graph. (ToG) 2014, 33, 156. [Google Scholar] [CrossRef] [Green Version]
- Serrão, M.; Shahrabadi, S.; Moreno, M.; José, J.; Rodrigues, J.I.; Rodrigues, J.M.; du Buf, J.H. Computer vision and gis for the navigation of blind persons in buildings. Univ. Access Inf. Soc. 2015, 14, 67–80. [Google Scholar] [CrossRef]
- Korman, S.; Milam, M.; Soatto, S. OATM: Occlusion Aware Template Matching by Consensus Set Maximization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2675–2683. [Google Scholar]
- Sun, K.; Heß, R.; Xu, Z.; Schilling, K. Real-time robust six degrees of freedom object pose estimation with a time-of-flight camera and a color camera. J. Field Robot. 2015, 32, 61–84. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, Z.; Cong, P.; Wu, F. Robust depth sensing with adaptive structured light illumination. J. Vis. Commun. Image Represent. 2014, 25, 649–658. [Google Scholar] [CrossRef]
- Marchand, E. Visual Tracking. In Encyclopedia of Robotics; Springer: Berlin/Heidelberg, Germany; pp. 1–16, in press.
- Reitmayr, G.; Eade, E.; Drummond, T.W. Semi-Automatic Annotations in Unknown Environments. In Proceedings of the Mixed and Augmented Reality, Nara, Japan, 13–16 November 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 67–70. [Google Scholar]
- Qiao, X.; Ren, P.; Dustdar, S.; Liu, L.; Ma, H.; Chen, J. Web AR: A Promising Future for Mobile Augmented Reality—State of the Art, Challenges, and Insights. Proc. IEEE 2019, 107, 651–666. [Google Scholar] [CrossRef]
- Adão, T.; Pádua, L.; Narciso, D.; Sousa, J.J.; Agrellos, L.; Peres, E.; Magalhães, L. MixAR: A Multi-Tracking Mixed Reality System to Visualize Virtual Ancient Buildings Aligned Upon Ruins. J. Inf. Tech. Res. 2019, 12, 1–33. [Google Scholar] [CrossRef]
- Takahashi, W.; Oshikawa, S.; Mori, S. Real-time markerless tumour tracking with patient-specific deep learning using a personalised data generation strategy: Proof of concept by phantom study. Br. J. Radiol. 2020, 93, 20190420. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Baena, F.R.Y. Automatic Markerless Registration and Tracking of the Bone for Computer-Assisted Orthopaedic Surgery. IEEE Access. 2020, 8, 42010–42020. [Google Scholar] [CrossRef]
- Nath, T.; Mathis, A.; Chen, A.C.; Patel, A.; Bethge, M.; Mathis, M.W. Using DeepLabCut for 3D markerless pose estimation across species and behaviors. Nat. Protoc. 2019, 14, 2152–2176. [Google Scholar] [CrossRef] [PubMed]
- Roetenberg, D.; Slycke, P.J.; Veltink, P.H. Ambulatory position and orientation tracking fusing magnetic and inertial sensing. IEEE Trans. Biomed. Eng. 2007, 54, 883–890. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, S.; Ullah, S. Feature-Based Tracking via SURF Detector and BRISK Descriptor. In Proceedings of the International Symposium on Artificial Intelligence and Robotics, Nanjing, China, 23–25 November 2018; Springer: Cham, Switzerland, 2018; pp. 147–157. [Google Scholar]
- Kaji, S.; Kolivand, H.; Madani, R.; Salehinia, M.; Shafaie, M. Augmented Reality in Smart Cities: A Multimedia Approach. J. Eng. Technol. 2018, 6, 28–45. [Google Scholar]
- Belghit, H.; Bellarbi, A.; Zenati, N.; Otmane, S. Vision-based Pose Estimation for Augmented Reality: A Comparison Study. arXiv 2018, arXiv:1806.09316. [Google Scholar]
- Wang, J.; Shen, Y.; Yang, S. A practical marker-less image registration method for augmented reality oral and maxillofacial surgery. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 763–773. [Google Scholar] [CrossRef]
- Termeh-Razavi, V.; Sadeghi-Niaraki, A. Design and Implementation of Ubiquitous Health System (U-Health) using Smart-Watches Sensors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 607. [Google Scholar] [CrossRef] [Green Version]
- Nikparvar, B.; Sadeghi-Niaraki, A.; Azari, P. Ubiquitous Indoor Geolocation: A Case Study of Jewellery Management System. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 215. [Google Scholar] [CrossRef] [Green Version]
- Oskiper, T.; Sizintsev, M.; Branzoi, V.; Samarasekera, S.; Kumar, R. Augmented reality binoculars. IEEE Trans. Vis. Comput. Graph. 2015, 21, 611–623. [Google Scholar] [CrossRef]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. Enhanced inertial-aided indoor tracking system for wireless sensor networks: A review. IEEE Sens. J. 2014, 14, 2921–2929. [Google Scholar] [CrossRef]
- Park, K.; Shin, H.; Cha, H. Smartphone-based pedestrian tracking in indoor corridor environments. Pers. Ubiquitous Comput. 2013, 17, 359–370. [Google Scholar] [CrossRef]
- Curey, R.K.; Ash, M.E.; Thielman, L.; Barker, C. Proposed IEEE Inertial Systems Terminology Standard and Other Inertial Sensor Standards. In Proceedings of the Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 83–90. [Google Scholar]
- Mangas, E.; Bilas, A. Flash: Fine-Grained Localization in Wireless Sensor Networks Using Acoustic Sound Transmissions and High Precision Clock Synchronization. In Proceedings of the 29th IEEE Conference on Distributed Computing Systems, Montreal, QC, Canada, 22–26 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 289–298. [Google Scholar]
- Kim, H.S.; Choi, J.S. Advanced Indoor Localization Using Ultrasonic Sensor and Digital Compass. In Proceedings of the International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 223–226. [Google Scholar]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Magnetic Field Based Heading Estimation for Pedestrian Navigation Environments. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–10. [Google Scholar]
- Hu, C.; Li, M.; Meng, M.Q.H.; Song, S. A new tracking system for three magnetic objectives. IEEE Trans. Magn. 2010, 46, 4023–4029. [Google Scholar]
- Caron, G.; Dame, A.; Marchand, E. Direct model based visual tracking and pose estimation using mutual information. Image Vis. Comput. 2014, 32, 54–63. [Google Scholar] [CrossRef] [Green Version]
- Dame, A.; Marchand, E. Accurate Real-Time Tracking Using Mutual Information. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), Seoul, Korea, 13–16 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 47–56. [Google Scholar]
- Zhang, J.; Hallquist, A.; Liang, E.; Zakhor, A. Location-Based Image Retrieval for Urban Environments. In Proceedings of the International Conference on Image Processing (ICIP), Brussels, Belgium, 11–14 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 3677–3680. [Google Scholar]
- Arth, C.; Klopschitz, M.; Reitmayr, G.; Schmalstieg, D. Real-Time Self-Localization from Panoramic Images on Mobile Devices. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), Basel, Switzerland, 26–29 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 37–46. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. Orb: An Efficient Alternative to Sift or Surf. In Proceedings of the International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2564–2571. [Google Scholar]
- Lepetit, V.; Vacchetti, L.; Thalmann, D.; Fua, P. Fully Automated and Stable Registration for Augmented Reality Applications. In Proceedings of the 2nd IEEE/ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 10 October 2003; IEEE: Piscataway, NJ, USA, 2003; p. 93. [Google Scholar]
- Baumberg, A. Reliable Feature Matching Across Widely Separated Views. In Proceedings of the International Conference on Computer Vision and Pattern Recognition, Hilton Head Island, SC, USA, 15 June 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 774–781. [Google Scholar]
- Mooser, J.; You, S.; Neumann, U.; Wang, Q. Applying Robust Structure from Motion to Markerless Augmented Reality. In Proceedings of the Workshop on Applications of Computer Vision (WACV), Snowbird, UT, USA, 7–8 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–8. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and resolution of kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed] [Green Version]



{kind=link}
{kind=link}
| Classification Criteria | References |
|---|---|
| 1. Marker-Less | |
| 1.1. Sensor-Based | |
| 1.1.1. Inertial | [2,15,36,37,38,39,40,41,42,43,44,45,46,47,48,49] |
| 1.1.2. Acoustic | [50,51,52,53,54,55,56,57] |
| 1.1.3. Magnetic | |
| 1.2. Vision-Based | [7,33,54,58,59,60,61,62,63] |
| 1.2.1. Model-Based | |
| 1.2.1.1. Edge-Based | [64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80] |
| 1.2.1.2. Template matching | [1,63,81,82,83] |
| 1.2.1.3. Interest-Point- Based | [84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101] |
| 1.2.1.4. Optical flow | |
| 1.2.1.5. Depth imaging | |
| 1.2.2. No-Model-Based |
| Challenges. | Inertial | Acoustic | Magnetic |
|---|---|---|---|
| Accuracy | [40,41,42] | [44,45,48] | [51,54,55,56,57], |
| Drift | [37,40,41] | [44,48] | [10,50,55], |
| Visibility | [44] | [32] | |
| GIS model | [2,15] | [106] | [19] |
| Indoor | [41,42] | [44,48,49] | [50,56] |
| Outdoor | [15,40,42], | [48] | [10,29] |
| Challenges | Edge-Based | Template Matching | Interest Point | Optical Flow | Depth Imaging | No-Model-Based |
|---|---|---|---|---|---|---|
| Automatic initialization | [58] | [64,65,69] | [72] | [1] | [88,89] | [84,99] |
| Manual initialization | [33,54,59,63] | [80] | [63], | [85] | [95,100] | |
| Occlusion handling | [33,54,60,63] | [65,66,69] | [8,72] | [1,63,81] | [85,87,88,89] | [84,94,95] |
| Jitter | [33] | [72,118], | [83] | [84] | ||
| Handling illumination changes | [33,60,63] | [69] | [71,76,79,80], | [63,81,83], | [90,92] | [94] |
| Compatible with GIS environments | [58,59,61] | [100,111] | ||||
| Compatible with CAD environments | [7,33,54] | [64] | ||||
| Indoor | [7,33,60] | [65,66] | [128] | [1,83] | [89,92] | [84,97] |
| Outdoor | [54,58,59,61], | [69] | [60,64] | [1,83] | [85,90] | [59,84,97,99,111] |
| Category | Device/Algorithm/Method | Advantage | Disadvantage | ||
|---|---|---|---|---|---|
| Sensor-based | Inertial | Gyroscope, | Self-contained, popular in mobile devices, fusion possible to overcome errors, applicable to indoor/outdoor, real-time | Bias & rectification required, gyros have inseparable white noise, accumulate errors, drift up to 10 degrees/min, need positioning systems | |
| Accelerometer | |||||
| Acoustic | ToA, TDoA, AoA | 6 DoF pose estimation | Sound travels slowly, sensitive to environment (humid, temp, etc.), not popular in mobile devices | ||
| Magnetic | Compass | 3 DoF (orientations) & 6 DoF (not popular) pose estimation possible, real-time | Less accurate than inertial methods, subject to magnetic field distortion & jitter, need positioning systems in case of 3 DoF, error up to 6 degrees | ||
| Vision-Based | Model based | Edge-Based | Mar-Hilldreth edge detector, | Compatible with GIS/CAD models, excellent for texture-less objects, applicable to indoor/outdoor, very reliable, automatic initialization possible | Background clutter errors, not fast enough for real-time applications, rotation error about 2 degrees, position error 10–15 cm |
| Hough transform | |||||
| Interest Point Based | SIFT, SURF, FAST, RANSAC, FREAK | very reliable in feature extraction (scale, orientation, affine transformation, and illumination invariant), very accurate registration, applicable to indoor/outdoor | Mostly compatible with point clouds & image databases, initialization to GIS models is challenging | ||
| Template Matching | Efficient for poorly textured views, automatic initialization, applicable to indoor/outdoor | Heavy computation time, not applicable to vector based GIS, | |||
| Optical Flow | KLT | Useful for tracking movement, applicable to indoor/outdoor | Not robust to illumination change & large camera displacement, cumulative error | ||
| Depth imaging | Structured Light (SL), Time of Flight (ToF) | IR sensors are becoming popular in mobile devices, applicable to indoor/outdoor | Narrow sensor range (SL, 3 m; ToA, 4 m), subject to errors caused by ambient background light, depth inhomogeneity, motion, multi-path effects, and temperature drift | ||
| No-Model Based | SFM, Visual-SLAM, bundle, KF, EKF | Very popular, useful for applications in unknown environments, applicable to indoor/outdoor | Initialization and matching to a reference mode is not easy, accumulate error, | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadeghi-Niaraki, A.; Choi, S.-M. A Survey of Marker-Less Tracking and Registration Techniques for Health & Environmental Applications to Augmented Reality and Ubiquitous Geospatial Information Systems. Sensors 2020, 20, 2997. https://doi.org/10.3390/s20102997
Sadeghi-Niaraki A, Choi S-M. A Survey of Marker-Less Tracking and Registration Techniques for Health & Environmental Applications to Augmented Reality and Ubiquitous Geospatial Information Systems. Sensors. 2020; 20(10):2997. https://doi.org/10.3390/s20102997
Chicago/Turabian StyleSadeghi-Niaraki, Abolghasem, and Soo-Mi Choi. 2020. "A Survey of Marker-Less Tracking and Registration Techniques for Health & Environmental Applications to Augmented Reality and Ubiquitous Geospatial Information Systems" Sensors 20, no. 10: 2997. https://doi.org/10.3390/s20102997