Routing Based Multi-Agent System for Network Reliability in the Smart Microgrid

 , , ,
, , ,
Abstract
:1. Introduction
- the proposed methodology identifies the shortest routes to transmit and communicate generation to distribution information data in the microgrid network. This improves network quality based on three parameters i.e., delay, throughput and jitter, along with queueing metrics. The proposed model achieved from 35.3% to 43% improvement in the network delay performance based on the CBR traffic model for the microgrid for the ideal network. In the case of the fault model, the delay improvement varies from 41.1% to 44.5% with improved reliability
- the paper provides a fault model to improve communication reliability in the microgrid network
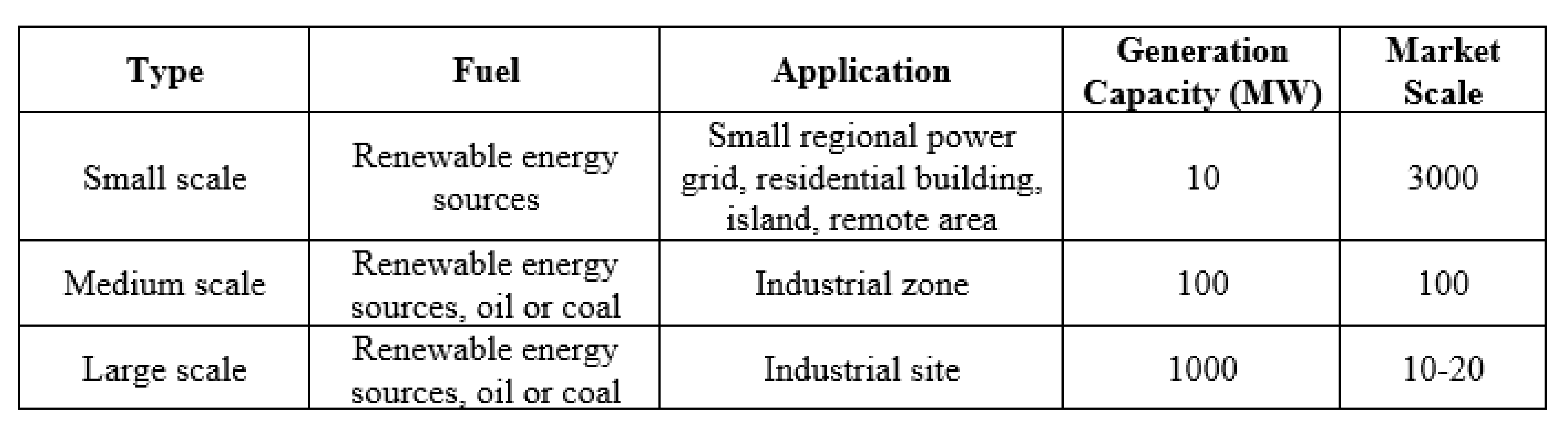
- to validate the proposed algorithm, testing was done for two different cases comparing with three variations in the size of the microgrid i.e., small, medium, and large-scale network
2. Related Work
2.1. Transmission Latency
2.2. Communication Reliability
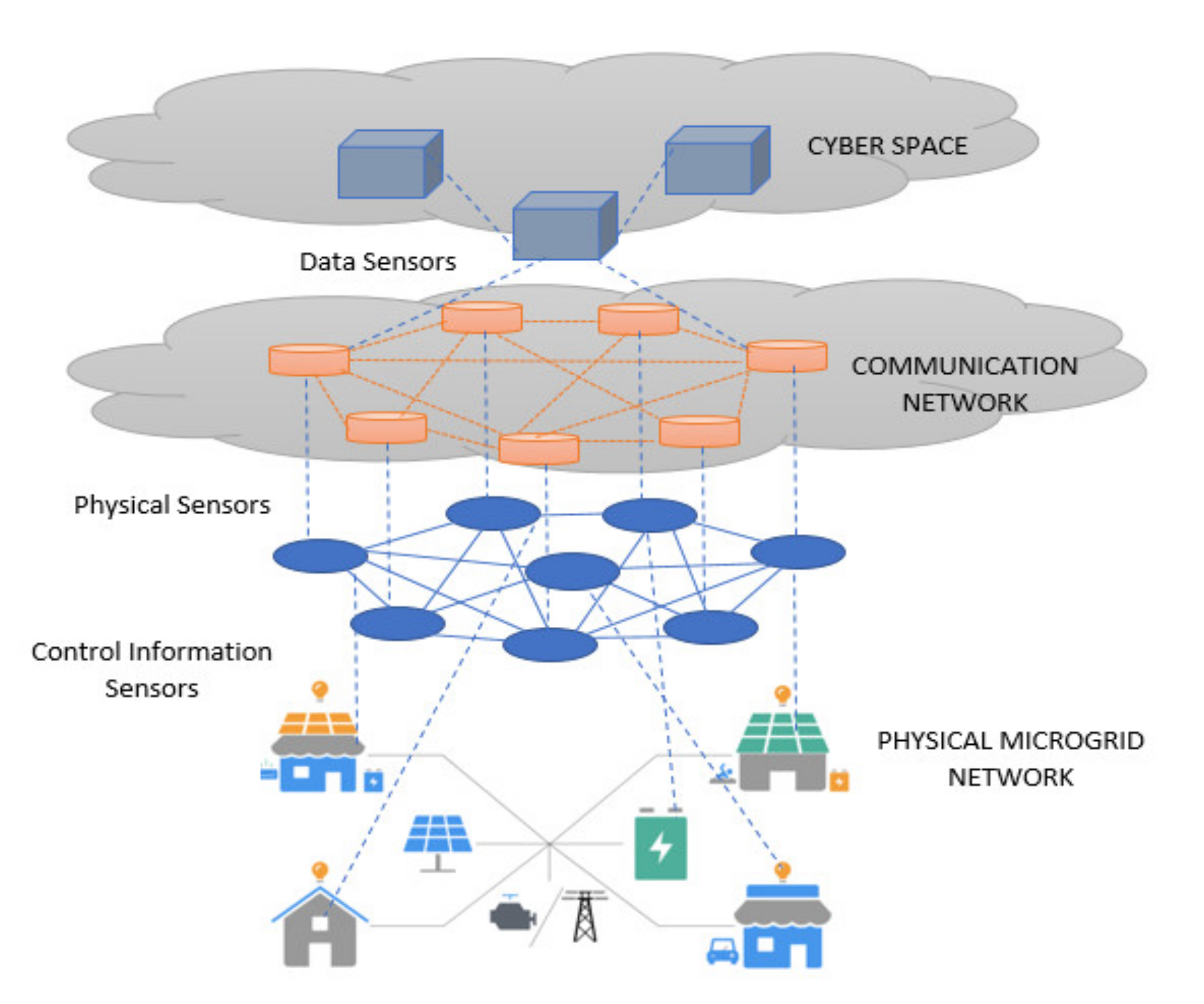
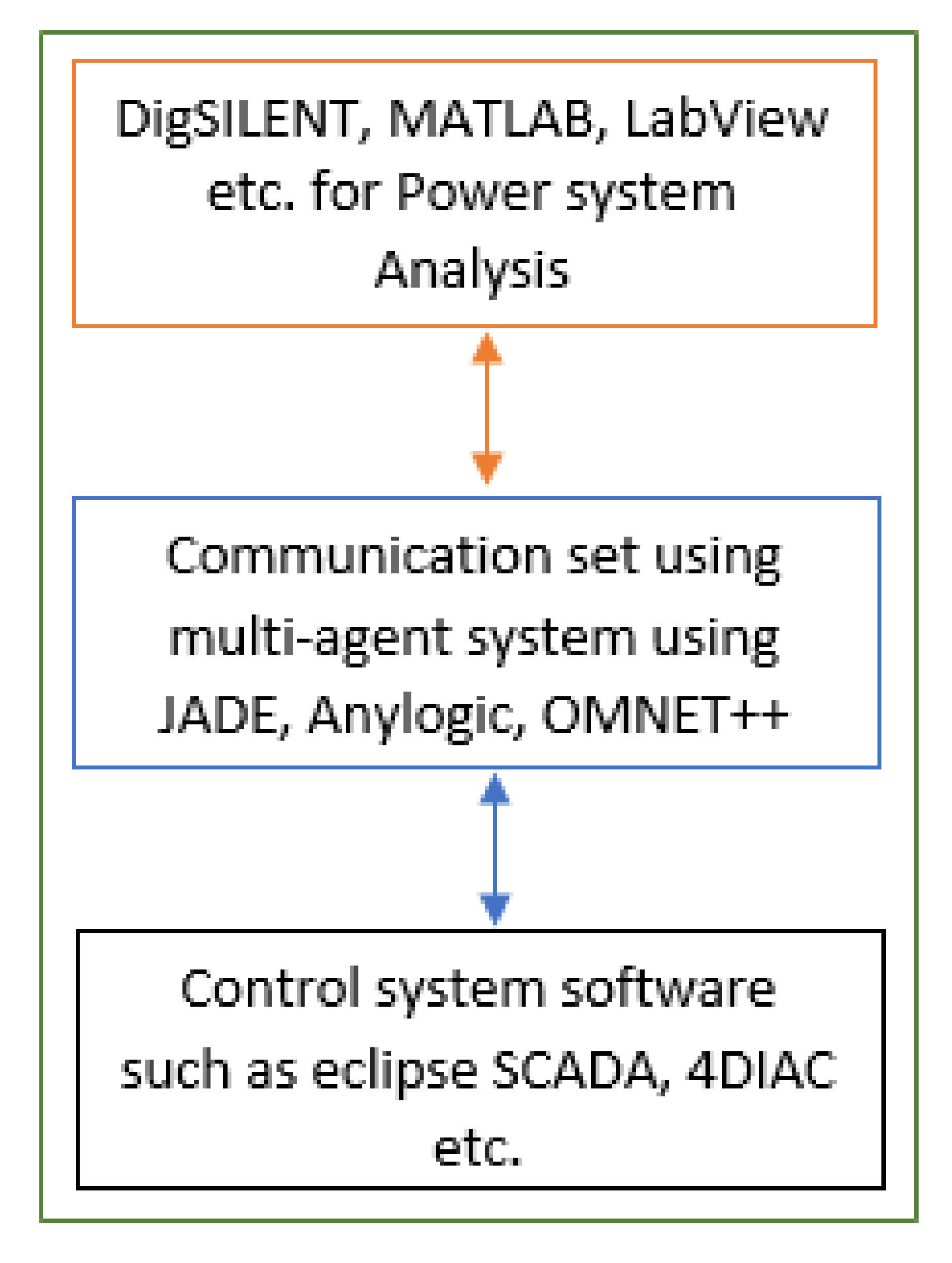
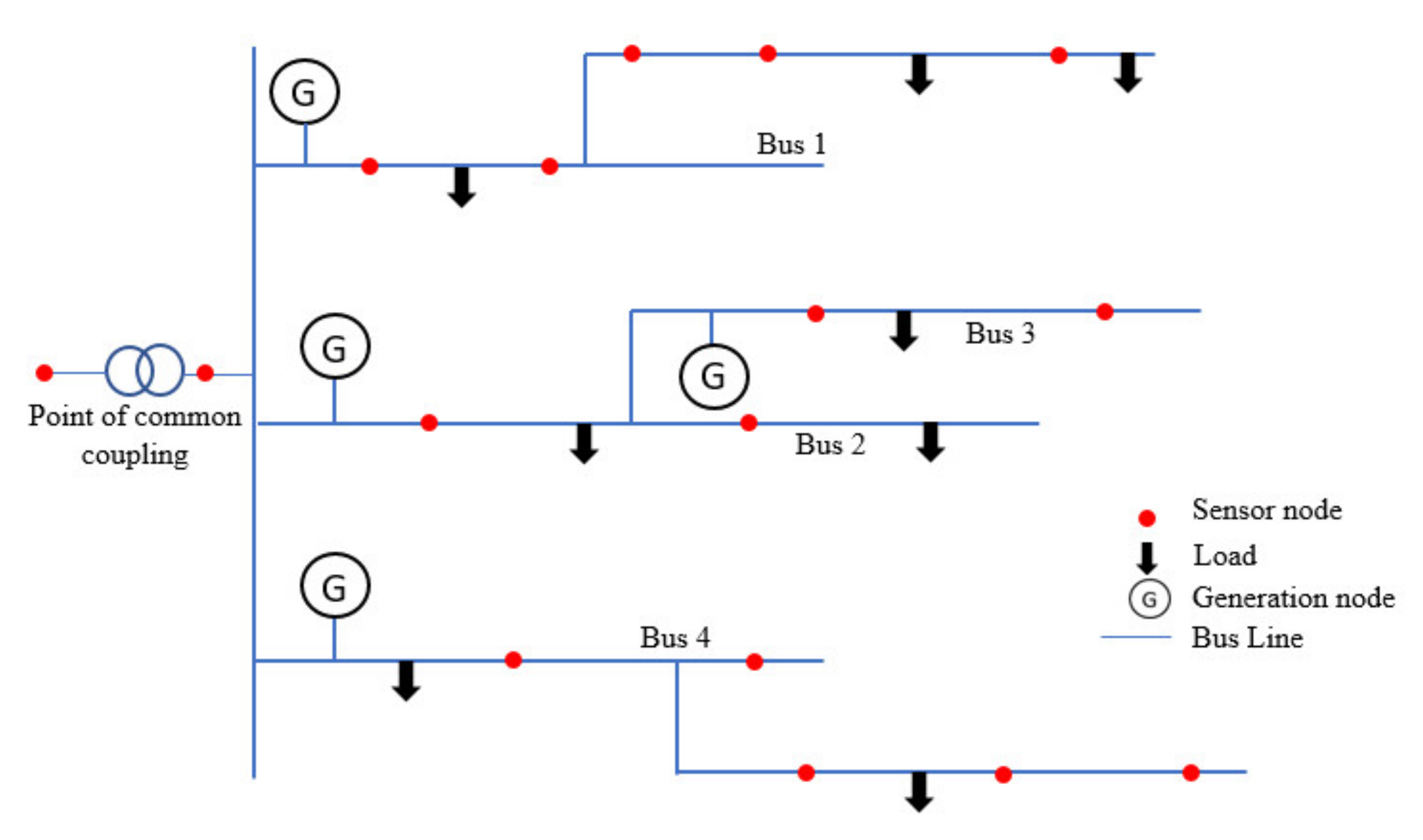
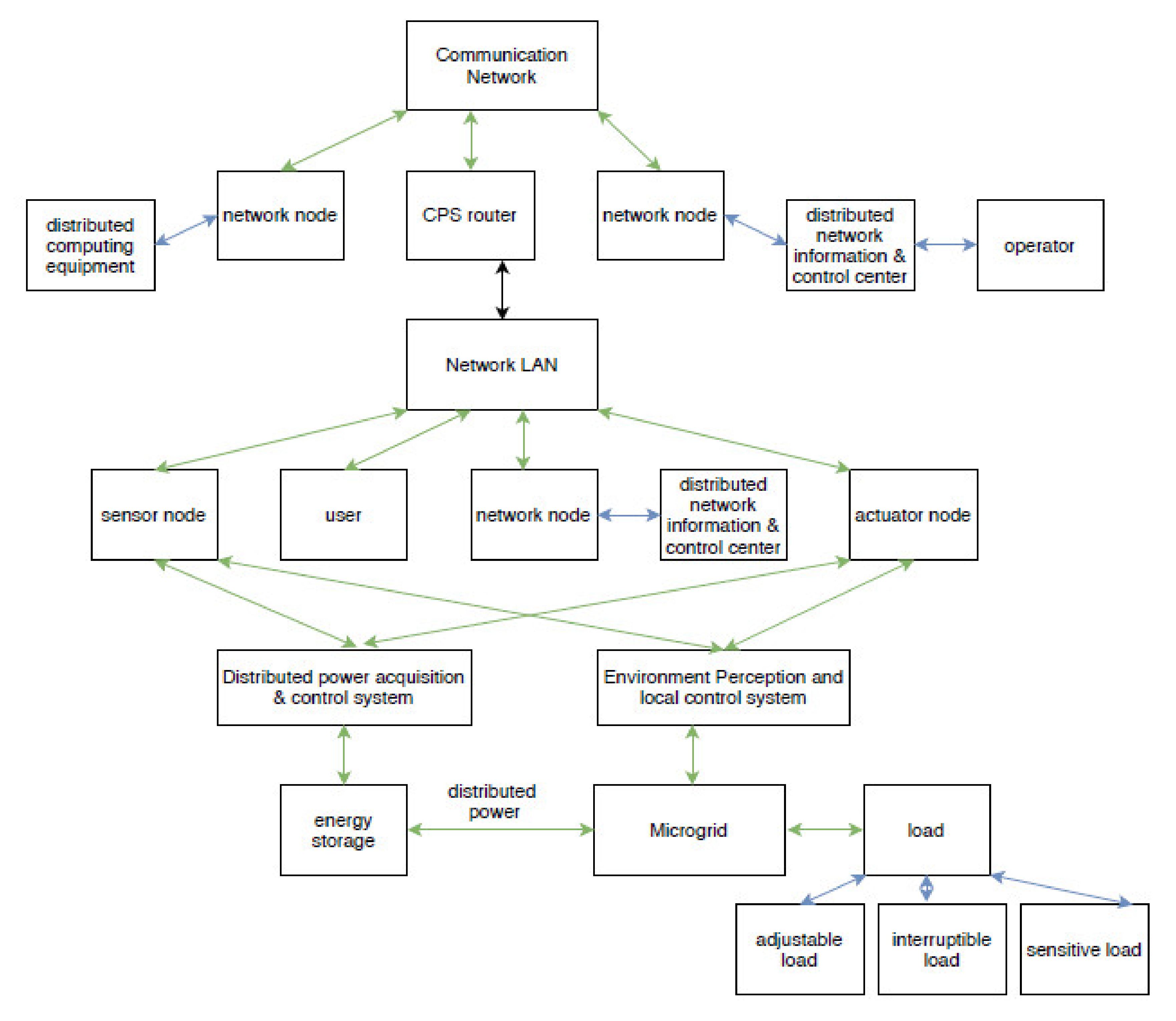
3. Network Construction
4. Methodology
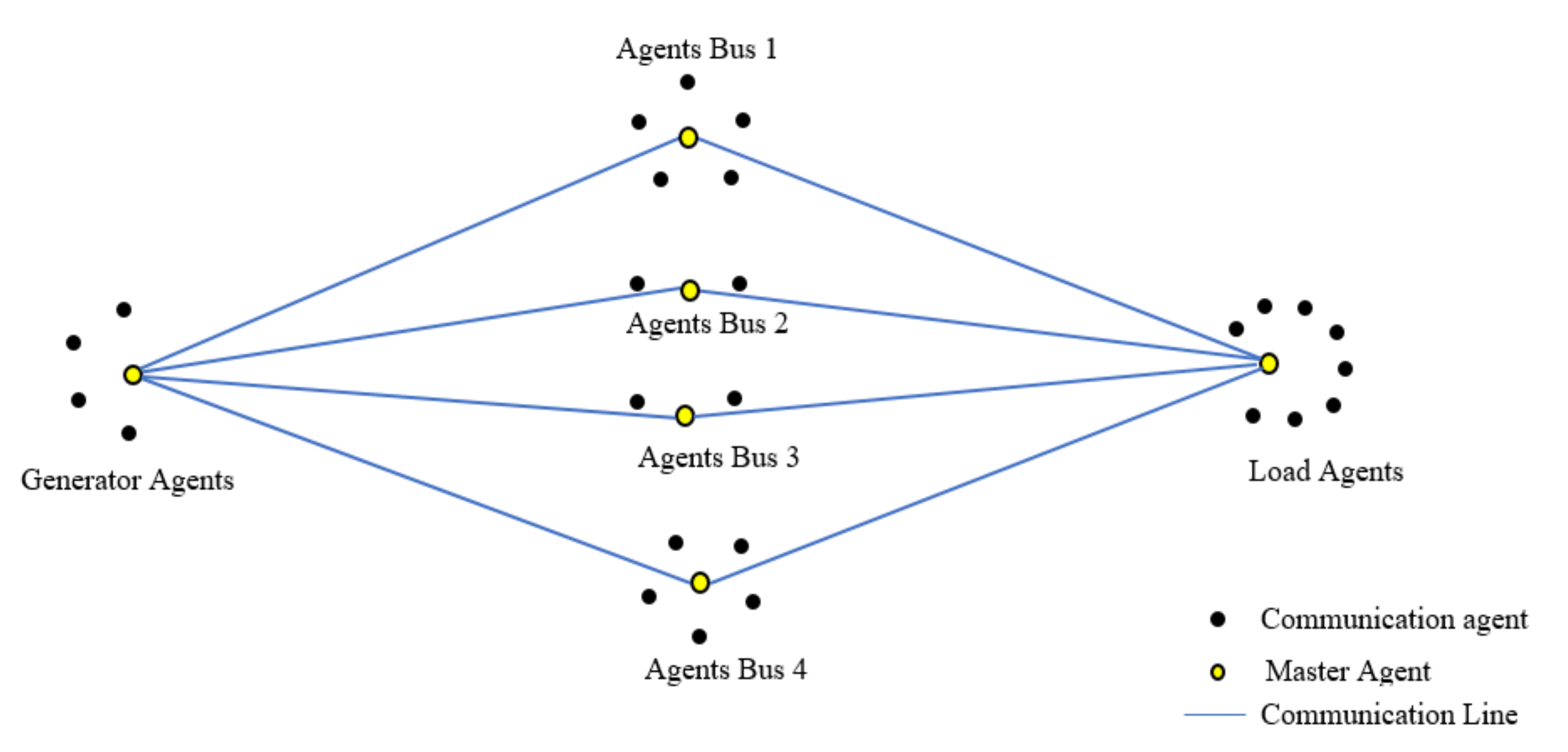
4.1. Proposed Agent Model
4.2. Network Performance Assessment
4.3. Proposed Agent Model
| Algorithm 1: Algorithm for the proposed agent model. |
| Input: number of nodes, Output: Increased Throughput measure and reduced delay and jitter
|
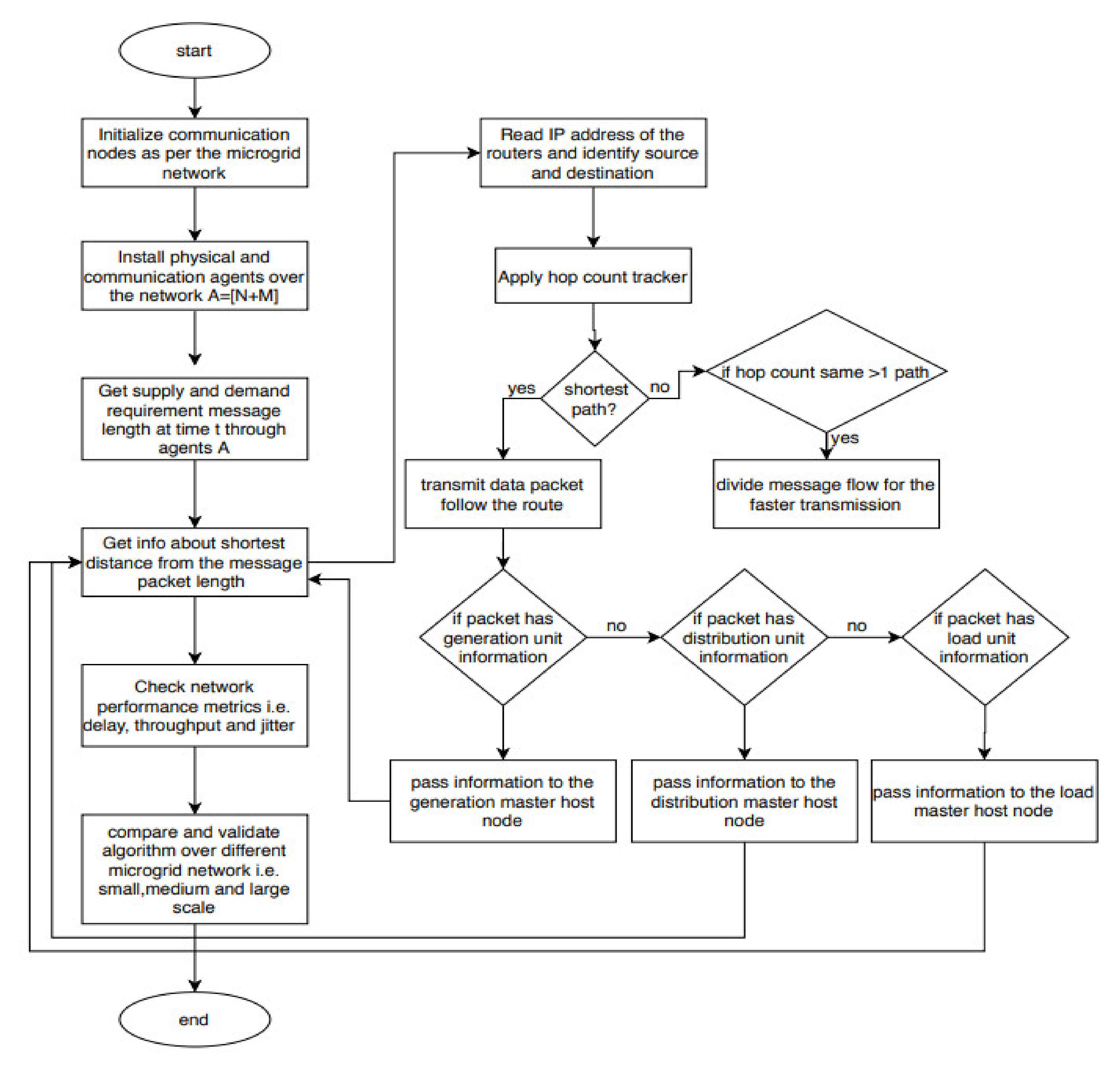
4.4. Flow Chart
5. Simulation Results
5.1. Performance Metrics
- Throughput: this is the average amount of packets received by the node per second.To calculate the throughput at the server:Case 1- Session Completed:Case2- Session incomplete:
- Delay: this is the function value of travel and processing time of the signal/data packet traversing between sender and receiver:where;
- Jitter: this is the delay inconsistency between each packet. Jitter occurs due to inconsistent delay pacing during packet transmission. To calculate the Average Jitter, the following equation is used:where;
5.2. Result Analysis
5.2.1. Case Study 1: Network Containing Single Fault
5.2.2. Case Study 2: Network Containing Two Faults
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, J.; Ulukus, S. Optimal Packet Scheduling in an Energy Harvesting Communication System. IEEE Trans. Commun. 2011, 60, 220–230. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.-M.; Kinoshita, T.; Lim, Y.; Kim, T.-H. A Bankruptcy Problem Approach to Load-shedding in Multiagent-based Microgrid Operation. Sensors 2010, 10, 8888–8898. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gurakan, B.; Ozel, O.; Yang, J.; Ulukus, S. Energy Cooperation in Energy Harvesting Communications. IEEE Trans. Commun. 2013, 61, 4884–4898. [Google Scholar] [CrossRef] [Green Version]
- Klaimi, J.; Rahim-Amoud, R.; Merghem-Boulahia, L.; Jrad, A. A novel loss-based energy management approach for smart grids using multi-agent systems and intelligent storage systems. Sustain. Cities Soc. 2018, 39, 344–357. [Google Scholar] [CrossRef]
- Hernández-Callejo, L.; Baladron, C.; Aguiar, J.M.; Calavia, L.; Carro, B.; Sánchez-Esguevillas, A.; Cook, D.; Chinarro, D.; Gómez-Sanz, J.J. A Study of the Relationship between Weather Variables and Electric Power Demand inside a Smart Grid/Smart World Framework. Sensors 2012, 12, 11571–11591. [Google Scholar] [CrossRef] [Green Version]
- Hittini, H.; Abdrabou, A.; Zhang, L. FDIPP: False Data Injection Prevention Protocol for Smart Grid Distribution Systems. Sensors 2020, 20, 679. [Google Scholar] [CrossRef] [Green Version]
- Bani-Ahmed, A.; Weber, L.; Nasiri, A.; Hosseini, H. Microgrid communications: State of the art and future trends. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19–22 October 2014; pp. 780–785. [Google Scholar]
- Xi, Y.; Yeh, E.M. Node-Based Optimal Power Control, Routing, and Congestion Control in Wireless Networks. IEEE Trans. Inf. Theory 2008, 54, 4081–4106. [Google Scholar] [CrossRef] [Green Version]
- Cui, S.; Madan, R.; Goldsmith, A.J.; Lall, S. Cross-Layer Energy and Delay Optimization in Small-Scale Sensor Networks. IEEE Trans. Wirel. Commun. 2007, 6, 3688–3699. [Google Scholar] [CrossRef] [Green Version]
- Moon, H.H.; Lee, J.J.; Choi, S.Y.; Cha, J.S.; Kang, J.M.; Kim, J.T.; Shin, M.C. A Study Using a Monte Carlo Method of the Optimal Configuration of a Distribution Network in Terms of Power Loss Sensing. Sensors 2011, 11, 7823–7834. [Google Scholar] [CrossRef] [Green Version]
- De Lemos, R.; Gacek, C.; Romanovsky, A. Architecting dependable systems. J. Syst. Softw. 2006, 79, 1359–1360. [Google Scholar] [CrossRef]
- Lai, J.; Lu, X.; Yu, X.; Yao, W.; Wen, J.; Cheng, S. Distributed Multi-DER Cooperative Control for Master-Slave-Organized Microgrid Networks With Limited Communication Bandwidth. IEEE Trans. Ind. Informatics 2019, 15, 3443–3456. [Google Scholar] [CrossRef]
- Ai, S.; Chakravorty, A.; Rong, C. Household Power Demand Prediction Using Evolutionary Ensemble Neural Network Pool with Multiple Network Structures. Sensors 2019, 19, 721. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gurakan, B.; Ozel, O.; Ulukus, S. Optimal Energy and Data Routing in Networks With Energy Cooperation. IEEE Trans. Wirel. Commun. 2015, 15, 857–870. [Google Scholar] [CrossRef] [Green Version]
- Aschermann, M.; Müller, J.P. Similarity-Based Resource Retrieval in Multi-agent Systems by Using Locality-Sensitive Hash Functions. Computer Vision 2013, 8076, 4–18. [Google Scholar] [CrossRef]
- Basso, G.; Hilaire, V.; Lauri, F.; Paire, D.; Gaillard, A. A Principled Approach for Smart Microgrids Simulation Using MAS. In Proceedings of the Lecture Notes in Computer Science; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013; Volume 8076, pp. 193–207. [Google Scholar]
- Kantamneni, A.; Brown, L.; Parker, G.; Weaver, W.W. Survey of multi-agent systems for microgrid control. Eng. Appl. Artif. Intell. 2015, 45, 192–203. [Google Scholar] [CrossRef]
- Inga, E.; Campaña, M.; Hincapié, R.; Moscoso-Zea, O. Optimal Deployment of FiWi Networks Using Heuristic Method for Integration Microgrids with Smart Metering. Sensors 2018, 18, 2724. [Google Scholar] [CrossRef] [Green Version]
- Saleh, M.; Esa, Y.; El Hariri, M.; Mohamed, A. Impact of Information and Communication Technology Limitations on Microgrid Operation. Energies 2019, 12, 2926. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, M.; Erol-Kantarci, M.; Kantarci, B.; Wu, L.; Li, J. Low-Latency Communications for Community Resilience Microgrids: A Reinforcement Learning Approach. IEEE Trans. Smart Grid 2020, 11, 1091–1099. [Google Scholar] [CrossRef]
- Shabani, A.; Mazlumi, K. Evaluation of a Communication-Assisted Overcurrent Protection Scheme for Photovoltaic-Based DC Microgrid. IEEE Trans. Smart Grid 2020, 11, 429–439. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; AlAbdulwahab, A.; Abusorrah, A.M. Flexible Division and Unification Control Strategies for Resilience Enhancement in Networked Microgrids. IEEE Trans. Power Syst. 2020, 35, 474–486. [Google Scholar] [CrossRef]
- Serban, I.; Cespedes, S.; Marinescu, C.; Azurdia-Meza, C.A.; Gomez, J.S.; Hueichapan, D.S.; Saez, D. Communication Requirements in Microgrids: A Practical Survey. IEEE Access 2020, 8, 47694–47712. [Google Scholar] [CrossRef]
- Bolgouras, V.; Ntantogian, C.; Panaousis, E.; Xenakis, C. Distributed Key Management in Microgrids. IEEE Trans. Ind. Informatics 2020, 16, 2125–2133. [Google Scholar] [CrossRef]
- Prakash, V.C.; Sivraj, P.; Sasi, K.K. Communication Network of Wide Area Measurement System for Real-Time Data Collection on Smart Micro Grid. In Proceedings of the Advances in Intelligent Systems and Computing; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2016; Volume 394, pp. 163–172. [Google Scholar]
- Stifter, M.; Widl, E.; Andren, F.; Elsheikh, A.; Strasser, T.; Palensky, P.; Stifter, M. Co-simulation of components, controls and power systems based on open source software. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Lévesque, M.; Xu, D.Q.; Joós, G.; Maier, M. Communications and power distribution network co-simulation for multidisciplinary smart grid experimentations. In Proceedings of the ANSS’12: Proceedings of the 45th Annual Simulation Symposium, Orlando, FL, USA, 26–29 March 2012. [Google Scholar]
- Xu, Y.; Zhang, J.; Wang, W.; Juneja, A.; Bhattacharya, S. Energy router: Architectures and functionalities toward Energy Internet. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011; pp. 31–36. [Google Scholar]
- Xie, Z.; Manimaran, G.; Vittal, V.; Phadke, A.; Centeno, V. An information architecture for future power systems and its reliability analysis. IEEE Trans. Power Syst. 2002, 17, 857–863. [Google Scholar] [CrossRef] [Green Version]
- Kounev, V.; Tipper, D.; Yavuz, A.A.; Grainger, B.M.; Reed, G.F. A Secure Communication Architecture for Distributed Microgrid Control. IEEE Trans. Smart Grid 2015, 6, 2484–2492. [Google Scholar] [CrossRef]
- Duan, Y.; Luo, L.; Li, Y.; Cao, Y.; Rehtanz, C.; Küch, M. Co-simulation of distributed control system based on JADE for smart distribution networks with distributed generations. IET Gener. Transm. Distrib. 2017, 11, 3097–3105. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2017, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Choi, B.J.; Zhuang, W.; Shen, X.; Awad, A.S.A.; Abdr, A. Multiagent coordination in microgrids via wireless networks. IEEE Wirel. Commun. 2012, 19, 14–22. [Google Scholar] [CrossRef]
- Kim, H.-M.; Lim, Y. A Communication Framework in Multiagent System for Islanded Microgrid. Int. J. Distrib. Sens. Networks 2012, 8, 382316. [Google Scholar] [CrossRef]
- Marzal, S.; Gonzalez-Medina, R.; Salas-Puente, R.A.; Figueres, E.; Sanfeliú, G.G. A Novel Locality Algorithm and Peer-to-Peer Communication Infrastructure for Optimizing Network Performance in Smart Microgrids. Energies 2017, 10, 1275. [Google Scholar] [CrossRef] [Green Version]
- Ren, L.; Qin, Y.; Li, Y.; Zhang, P.; Wang, B.; Luh, P.B.; Han, S.; Orekan, T.; Gong, T. Enabling resilient distributed power sharing in networked microgrids through software defined networking. Appl. Energy 2018, 210, 1251–1265. [Google Scholar] [CrossRef]
- Al Suwaidan, H.M. A communication framework for a self-organized ad hoc microgrid. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 2015. Corpus ID: 114553115. [Google Scholar]
- Cavendish, D.; Gerla, M. Internet QoS Routing using the Bellman-Ford Algorithm in International Conference on High Performance Networking; Springer: Berlin/Heidelberg, Germany, 1998; pp. 627–646. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, A.; Parag, Y.; Guerrero, J.M. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Wyld, D.C.; Wozniak, M.; Chaki, N.; Meghanathan, N.; Nagamalai, D. Trends in network and communications, International Conferences; Springer Nature Switzerland AG: Basel, Switzerland, 2011; Volume 197, pp. 1–730. [Google Scholar]
- Hu, J.; Zhang, T.; Du, S.; Zhao, Y. An Overview on Analysis and Control of Micro-grid System. Int. J. Control. Autom. 2015, 8, 65–76. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microgrid Bus System (100 Mbps Bandwidth) | UDP: Unicast | CBR Server | UDP: Broadcast | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Throughput (bits/s) | Delay (s) | Unicast End to End Throughput (bits/s) | Unicast End to End Delay (s) | Throughput (bits/s) | Delay (s) | Jitter (s) | Hop count | Queue Length (in bytes) | Longest Time in Queue | ||
| IEEE 9 (CBR node 7 to node 6) | |||||||||||
| Proposed agent-based approach | 3400 | 0.00131 | 4400 | 0.0013 | 1200 | 0.0011 | 5.5 × 10−8 | 5 | 9 × 10−6 | 5 × 10−6 | |
| No agent involvement | RIP protocol | 4400 | 0.0073 | 3200 | 0.0073 | 800 | 0.0013 | 0.00017 | 3 | 0.0009 | 0.00044 |
| OLSR | 3050 | 0.0073 | 4400 | 0.0073 | 2000 | 0.0012 | 5 × 106 | 1 | 0.0009 | 0.00045 | |
| OSPFv2 | 2700 | 0.0074 | 4600 | 0.0074 | 1700 | 0.0013 | 5.5 × 106 | 5 | 0.0009 | 0.00026 | |
| IEEE 14 (CBR node 2 to node 14) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0073 | 4250 | 0.0073 | 9000 | 0.0013 | 0.000019 | 2 | 0.008 | 0.00043 | |
| No agent involvement | RIP protocol | 3400 | 0.0074 | 4200 | 0.0074 | 9000 | 0.00134 | 0.000185 | 2 | 0.0085 | 0.00044 |
| OLSR | 3050 | 0.0074 | 4400 | 0.0074 | 9700 | 0.0015 | 7.5 × 106 | 1 | 0.01 | 0.0006 | |
| OSPFv2 | 2700 | 0.0074 | 4500 | 0.0074 | 3700 | 0.0017 | 0.00055 | 3 | 0.034 | 0.0095 | |
| IEEE 34 (CBR node 17 to node 26) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0145 | 4300 | 0.014 | 11,600 | 0.001 | 0.000185 | 3 | 0.0095 | 0.00055 | |
| No agent involvement | RIP protocol | 2100 | 0.015 | 5100 | 0.00145 | 3500 | 0.0014 | 0.0002 | 2 | 0.0135 | 0.00065 |
| OLSR | 2900 | 0.0145 Jitter (1.7 × 10−5) | 4400 | 0.0145 Jitter (1.7 × 10−5) | 13,000 | 0.0011 | 0.00055 | 1 | 0.0115 | 0.00065 | |
| OSPFv2 | 1850 | 0.0155 | 5500 | 0.0145 | 3,200 | 0.0011 | 0.00055 | 4 | 0.08 | 0.0097 | |
| IEEE 39 (CBR node 18 to node 15) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0013 | 4400 | 0.0013 | 9000 | 0.000125 | 0.00015 | 3 | 0.01 | 0.000457 | |
| No agent involvement | RIP protocol | 2900 | 0.0073 | 4450 | 0.0073 | 2200 | 0.0014 | 0.0002 | 3 | 0.013 | 0.00075 |
| OLSR | 3000 | 0.0073 | 4450 | 0.0073 | 46,000 | 0.0011 | 0.0006 | 1 | 0.024 | 0.00061 | |
| OSPFv2 | 1850 | 0.0073 | 5500 | 0.0073 | 4500 | 0.001 | 0.0006 | 2 | 1.1 | 0.019 | |
| IEEE 57 (CBR node 38 to node 46) | |||||||||||
| Proposed agent-based approach | 3450 | 0.00145 | 4450 | 0.0014 | 19,000 | 0.00014 | 0.00015 | 3 | 0.009 | 0.00059 | |
| No agent involvement | RIP protocol | 2200 | 0.0023 | 5100 | 0.00145 | 3500 | 0.0014 | 0.0002 | 2 | 0.0135 | 0.00065 |
| OLSR | 2950 | 0.0155 Jitter (1.7 × 10−6) | 4600 | 0.0155 Jitter (1.7 × 10−6) | 21,000 | 0.0012 | 0.00045 | 1 | 0.0135 | 0.00075 | |
| OSPFv2 | 1250 | 0.0135 | 5500 | 0.0145 | 13,200 | 0.0012 | 0.00045 | 4 | 0.089 | 0.0095 | |
| Microgrid Bus System (100 Mbps bandwidth) | UDP: Unicast | CBR Server | UDP: Broadcast | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Throughput (bits/s) | Delay (s) | Unicast End to End Throughput (bits/s) | Unicast End to End Delay (s) | Throughput (bits/s) | Delay (s) | Jitter (s) | Hop Count | Queue Length (in bytes) | Longest Time in Queue | ||
| IEEE 9 | |||||||||||
| Proposed agent-based approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| No agent involvement | RIP protocol | ||||||||||
| OLSR | ✓ | ✓ | |||||||||
| OSPFv2 | ✓ | ✓ | |||||||||
| IEEE 14 | |||||||||||
| Proposed agent-based approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| No agent involvement | RIP protocol | ||||||||||
| OLSR | ✓ | ✓ | |||||||||
| OSPFv2 | ✓ | ||||||||||
| IEEE 34 | |||||||||||
| Proposed agent-based approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| No agent involvement | RIP protocol | ||||||||||
| OLSR | ✓ | ✓ | |||||||||
| OSPFv2 | ✓ | ||||||||||
| IEEE 39 | |||||||||||
| Proposed agent-based approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| No agent involvement | RIP protocol | ||||||||||
| OLSR | ✓ | ✓ | |||||||||
| OSPFv2 | ✓ | ||||||||||
| IEEE 57 | |||||||||||
| Proposed agent-based approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| No agent involvement | RIP protocol | ||||||||||
| OLSR | ✓ | ✓ | |||||||||
| OSPFv2 | ✓ | ||||||||||
| Microgrid Bus System (100 Mbps bandwidth) | UDP: Unicast | CBR Server | UDP: Broadcast | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Throughput (bits/s) | Delay (s) | Unicast End to End Throughput (bits/s) | Unicast End to End Delay (s) | Throughput (bits/s) | Delay (s) | Jitter (s) | Hop Count | Queue Length (in bytes) | Longest Time in Queue | ||
| IEEE 9 (fault injected in node 7) | |||||||||||
| Proposed agent-based approach | 3500 | 0.00131 | 4300 | 0.0013 | 1200 | 0.0011 | 5.5 × 10−8 | 4 | 9 × 10−6 | 5 × 10−6 | |
| No agent involvement | RIP protocol | 4400 | 0.0073 | 3200 | 0.0073 | 800 | 0.0012 | 0.00017 | 2 | 0.0009 | 0.00045 |
| OLSR | 3050 | 0.0073 | 4400 | 0.0073 | 2000 | 0.0014 | 5 × 10−6 | 2 | 0.0009 | 0.00045 | |
| OSPFv2 | 2700 | 0.0074 | 4700 | 0.0074 | 1700 | 0.0013 | 5.5 × 10−6 | 5 | 0.0009 | 0.00026 | |
| IEEE 14 (fault injected in node 2) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0073 | 4250 | 0.0072 | 9000 | 0.0013 | 0.000019 | 2 | 0.008 | 0.00043 | |
| No agent involvement | RIP protocol | 3350 | 0.0074 | 4200 | 0.0074 | 8500 | 0.00114 | 0.000185 | 1 | 0.0085 | 0.00044 |
| OLSR | 3050 | 0.0075 | 4400 | 0.0074 | 9000 | 0.0015 | 7.5 × 10−6 | 1 | 0.01 | 0.0006 | |
| OSPFv2 | 2700 | 0.0074 | 4500 | 0.0074 | 3700 | 0.0017 | 0.00055 | 3 | 0.035 | 0.0095 | |
| IEEE 34 (fault injected in node 17) | |||||||||||
| Proposed agent-based approach | 3450 | 0.015 | 4300 | 0.014 | 11,600 | 0.001 | 0.000185 | 2 | 0.0095 | 0.00055 | |
| No agent involvement | RIP protocol | 2100 | 0.015 | 5100 | 0.00155 | 3500 | 0.0014 | 0.0002 | 2 | 0.0135 | 0.00065 |
| OLSR | 2800 | 0.0145 Jitter (1.7 × 10−5) | 4400 | 0.0145 Jitter (1.7 × 10−5) | 13,000 | 0.0011 | 0.00055 | 1 | 0.0115 | 0.00065 | |
| OSPFv2 | 1850 | 0.0155 | 5500 | 0.0145 | 3200 | 0.0011 | 0.00055 | 4 | 0.08 | 0.0097 | |
| IEEE 39 (fault injected in node 18) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0013 | 4400 | 0.0013 | 9000 | 0.000125 | 0.00015 | 3 | 0.01 | 0.000457 | |
| No agent involvement | RIP protocol | 2900 | 0.0073 | 4450 | 0.00735 | 2200 | 0.0014 | 0.0002 | 4 | 0.013 | 0.00075 |
| OLSR | 3100 | 0.0073 | 4450 | 0.0073 | 46,000 | 0.0011 | 0.0006 | 1 | 0.024 | 0.00061 | |
| OSPFv2 | 1850 | 0.0073 | 5500 | 0.0073 | 4500 | 0.001 | 0.0006 | 2 | 1.1 | 0.019 | |
| IEEE 57 (fault injected in node 38) | |||||||||||
| Proposed agent-based approach | 3450 | 0.00145 | 4450 | 0.0014 | 19,000 | 0.00014 | 0.00015 | 3 | 0.009 | 0.00059 | |
| No agent involvement | RIP protocol | 3450 | 0.00145 | 4450 | 0.0014 | 19,000 | 0.00011.5 | 0.00015 | 3 | 0.009 | 0.00059 |
| OLSR | 2300 | 0.0023 | 5100 | 0.00145 | 3500 | 0.0014 | 0.0002 | 2 | 0.0135 | 0.00065 | |
| OSPFv2 | 2950 | 0.0155 Jitter (1.7 × 10−6) | 4600 | 0.0155 Jitter (1.7 × 10−6) | 21,000 | 0.0012 | 0.00045 | 1 | 0.0145 | 0.00075 | |
| Microgrid Bus System (100 Mbps bandwidth) | UDP: Unicast | CBR Server | UDP: Broadcast | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Throughput (bits/s) | Delay (s) | Unicast End to End Throughput (bits/s) | Unicast End to End Delay (s) | Throughput (bits/s) | Delay (s) | Jitter (s) | Hop Count | Queue Length (in bytes) | Longest Time in Queue | ||
| IEEE 9 (fault injected in node 7 and 8) | |||||||||||
| Proposed agent-based approach | 3500 | 0.00131 | 4300 | 0.0013 | 1200 | 0.0011 | 5.5 × 10−8 | 4 | 9 × 10−6 | 5 × 10−6 | |
| No agent involvement | RIP protocol | 4200 | 0.0074 | 3200 | 0.0073 | 800 | 0.0013 | 0.00017 | 4 | 0.0009 | 0.00045 |
| OLSR | 3050 | 0.0073 | 4400 | 0.0073 | 2300 | 0.0014 | 5 × 10−6 | 2 | 0.0009 | 0.00047 | |
| OSPFv2 | 2500 | 0.0074 | 4700 | 0.0074 | 1700 | 0.0013 | 5.5 × 10−6 | 5 | 0.0009 | 0.00026 | |
| IEEE 14 (fault injected in node 2 and 5) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0073 | 4250 | 0.0072 | 9000 | 0.0013 | 0.000019 | 2 | 0.008 | 0.00043 | |
| No agent involvement | RIP protocol | 3350 | 0.0074 | 4100 | 0.0074 | 8500 | 0.00114 | 0.000185 | 1 | 0.0085 | 0.00044 |
| OLSR | 3050 | 0.0075 | 4400 | 0.0074 | 9000 | 0.0015 | 7.5 × 10−6 | 1 | 0.01 | 0.00062 | |
| OSPFv2 | 2700 | 0.0074 | 4500 | 0.0075 | 3700 | 0.0017 | 0.00055 | 3 | 0.035 | 0.0095 | |
| IEEE 34 (fault injected in node 17 and 6) | |||||||||||
| Proposed agent-based approach | 3450 | 0.015 | 4300 | 0.014 | 11,600 | 0.001 | 0.000185 | 2 | 0.0095 | 0.00055 | |
| No agent involvement | RIP protocol | 2100 | 0.015 | 5100 | 0.00155 | 3500 | 0.0014 | 0.0002 | 3 | 0.0135 | 0.0007 |
| OLSR | 2800 | 0.0145 Jitter (1.7 × 10−5) | 4400 | 0.0145 Jitter (1.7 × 10−5) | 14,000 | 0.0012 | 0.00055 | 1 | 0.0115 | 0.00065 | |
| OSPFv2 | 1850 | 0.0155 | 5500 | 0.0145 | 3200 | 0.0011 | 0.00055 | 5 | 0.08 | 0.0097 | |
| IEEE 39 (fault injected in node 18 and 17) | |||||||||||
| Proposed agent-based approach | 3450 | 0.0013 | 4400 | 0.0013 | 9000 | 0.000125 | 0.00015 | 3 | 0.01 | 0.000457 | |
| No agent involvement | RIP protocol | 2900 | 0.0075 | 4500 | 0.00735 | 2200 | 0.0014 | 0.0002 | 4 | 0.013 | 0.00075 |
| OLSR | 3100 | 0.0073 | 4450 | 0.0073 | 45,000 | 0.0011 | 0.0006 | 1 | 0.024 | 0.00061 | |
| OSPFv2 | 1850 | 0.0073 | 5500 | 0.0073 | 4500 | 0.001 | 0.0006 | 2 | 1.1 | 0.0192 | |
| IEEE 57 (fault injected in node 38 and 27) | |||||||||||
| Proposed agent-based approach | 3550 | 0.00145 | 4450 | 0.00135 | 19,000 | 0.00014 | 0.00015 | 3 | 0.009 | 0.00059 | |
| No agent involvement | RIP protocol | 3450 | 0.00145 | 4450 | 0.0014 | 19,000 | 0.00013 | 0.00015 | 3 | 0.009 | 0.00059 |
| OLSR | 2300 | 0.0023 | 5100 | 0.00145 | 3500 | 0.0014 | 0.0002 | 2 | 0.0135 | 0.00065 | |
| OSPFv2 | 2950 | 0.0155 Jitter (1.8 × 10−6) | 4600 | 0.0155 Jitter (1.7 × 10−6) | 21,000 | 0.0012 | 0.00055 | 1 | 0.0145 | 0.00075 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, N.; Elamvazuthi, I.; Nallagownden, P.; Ramasamy, G.; Jangra, A. Routing Based Multi-Agent System for Network Reliability in the Smart Microgrid. Sensors 2020, 20, 2992. https://doi.org/10.3390/s20102992
Singh N, Elamvazuthi I, Nallagownden P, Ramasamy G, Jangra A. Routing Based Multi-Agent System for Network Reliability in the Smart Microgrid. Sensors. 2020; 20(10):2992. https://doi.org/10.3390/s20102992
Chicago/Turabian StyleSingh, Niharika, Irraivan Elamvazuthi, Perumal Nallagownden, Gobbi Ramasamy, and Ajay Jangra. 2020. "Routing Based Multi-Agent System for Network Reliability in the Smart Microgrid" Sensors 20, no. 10: 2992. https://doi.org/10.3390/s20102992