Plummeting Broadcast Storm Problem in Highways by Clustering Vehicles Using Dominating Set and Set Cover


Abstract
:1. Introduction
- To mitigate broadcast storm problem: Cluster heads are selected based on minimum dominating set and gateways are selected using set cover that minimizes the number of vehicles involved in rebroadcasting the alert message.
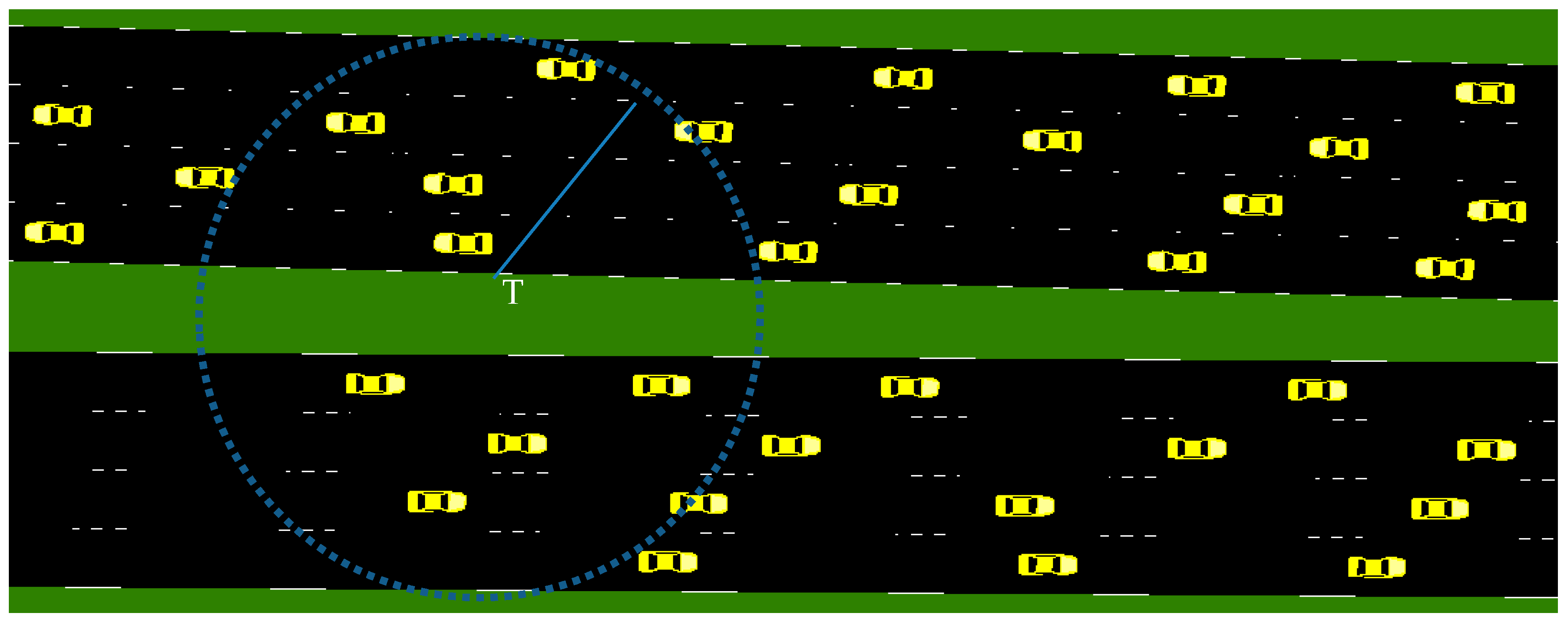
- To increase high reachability: During low-traffic density to address intermittent connectivity problem, vehicles moving in the opposite direction will carry the live messages and rebroadcast it, when a new vehicle within the zone of relevance moving towards the region of interest whose cluster state is not determined.
- To ensure high stability of clustering: The degree of cohesion (DC) of a vehicle among the neighborhood is computed using its relative speed, and the relative distance between vehicles and the vehicle with the highest DC is selected as a cluster head. Also, if a vehicle can hear from a gateway node, but not currently clustered, it is allowed to be un-clustered untill a vehicle with a high degree of cohesion with neighboring vehicles is found.
Related Works
2. Materials and Methods
2.1. Network Architecture
2.2. Graph Theory
3. Proposed Method
3.1. Cluster Formation
3.2. Cluster Head Selection
3.3. Gateway Selection
3.4. Reduction of Cluster Head Broadcast
3.5. Cluster Maintenance
3.6. Pseudocode
3.6.1. Initialization (Executed by All Nodes)
3.6.2. Node ‘’, upon Receiving Beacon Message from Node (Executed by All Nodes)
3.6.3. Calculate Degree of Cohesion (Executed by All Candidate Cluster Heads)
- up to 2-hop neighbours
3.6.4. Upon Receiving Messages from Candidate Cluster Heads () within 2-Hop Neighbors (Executed by Candidate Cluster Heads Only)
3.6.5. Upon Receiving Neighborhood Information from Candidate Gateways () (Executed by Cluster Heads Only)
3.6.6. After Receiving Neighborhood Information from all Candidate Gateways () in Its Neighborhood (Executed by Cluster Heads Only)
3.6.7. Upon Receiving Gateway Selection Message: (Executed by Candidate Gateways only)
3.6.8. When a Clustered Node Did Not Receive a Beacon Message from Its for Continuous Three Beacon Intervals: (Executed by All Nodes)
4. Simulation Results and Performance Analysis
4.1. Experimental Setup
4.2. Simulation Settings
4.3. Performance Metrics
4.4. Existing Algorithms Used for Comparison
4.5. Comparison Charts
4.6. Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organisation Road Traffic Injuries. Available online: http://www.who.int/mediacentre/factsheets/fs358/en/ (accessed on 21 April 2018).
- Khaliq, K.; Chughtai, O.; Shahwani, A.; Qayyum, A.; Pannek, J.; Khaliq, K.A.; Chughtai, O.; Shahwani, A.; Qayyum, A.; Pannek, J. An Emergency Response System: Construction, Validation, and Experiments for Disaster Management in a Vehicular Environment. Sensors 2019, 19, 1150. [Google Scholar] [CrossRef]
- Ni, S.-Y.; Tseng, Y.-C.; Chen, Y.-S.; Sheu, J.-P. The Broadcast Storm Problem in a Mobile Ad hoc Network. In Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking—MobiCom ’99, Seattle, WA, USA, 15–19 August 1999; ACM Press: New York, NY, USA, 1999; pp. 151–162. [Google Scholar]
- Jakubiak, J.; Koucheryavy, Y. State of the Art and Research Challenges for VANETs. In Proceedings of the 2008 5th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 10–12 January 2008; pp. 912–916. [Google Scholar]
- Yousefi, S.; Mousavi, M.; Fathy, M. Vehicular Ad Hoc Networks (VANETs): Challenges and Perspectives. In Proceedings of the 2006 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 761–766. [Google Scholar]
- Bali, R.S.; Kumar, N.; Rodrigues, J.J.P.C. Clustering in Vehicular Ad hoc Networks: Taxonomy, Challenges and Solutions. Veh. Commun. 2014, 1, 134–152. [Google Scholar] [CrossRef]
- Wang, X.; Shroff, N.; Pitsillides, A. Speed Adaptive Probabilistic Flooding in Cooperative Emergency Warning. In Proceedings of the 4th Annual International Conference on Wireless Internet, Maui, HI, USA, 17–19 November 2008; ACM Press: Maui, HI, USA, 2008. [Google Scholar]
- Krishna, P.; Vaidya, N.H.; Chatterjee, M.; Pradhan, D.K. A Cluster-based Approach for Routing in Dynamic Networks. ACM SIGCOMM Comput. Commun. Rev. 1997, 27, 49–64. [Google Scholar] [CrossRef]
- Lin, C.R.; Gerla, M. Adaptive Clustering for Mobile Wireless Networks. IEEE J. Sel. Areas Commun. 2006, 15, 1265–1275. [Google Scholar]
- Hu, M.; Zhong, Z.; Ni, M.; Baiocchi, A.; Hu, M.; Zhong, Z.; Ni, M.; Baiocchi, A. Design and Analysis of A Beacon-Less Routing Protocol for Large Volume Content Dissemination in Vehicular Ad Hoc Networks. Sensors 2016, 16, 1834. [Google Scholar] [CrossRef]
- Vegni, A.M.; Natalizio, E. Forwarder smart selection protocol for limitation of broadcast storm problem. J. Netw. Comput. Appl. 2015, 47, 61–71. [Google Scholar] [CrossRef] [Green Version]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Multihop-Cluster-Based IEEE 802.11p and LTE Hybrid Architecture for VANET Safety Message Dissemination. IEEE Trans. Veh. Technol. 2016, 65, 2621–2636. [Google Scholar] [CrossRef]
- Dong, W.; Lin, F.; Zhang, H.; Yin, Y. A cluster-based recursive broadcast routing algorithm to propagate emergency messages in city VANETs. In Proceedings of the 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, China, 6–8 May 2017; pp. 187–190. [Google Scholar]
- Ruiz, P.; Dorronsoro, B.; Khadraoui, D.; Bouvry, P.; Tardón, L. BODYF-A Parameterless Broadcasting Protocol Over Dynamic Forest. In Proceedings of the Special Session on Parallel and Grid Computing for Optimization as Part of the 2008 International Conference High Performance Computing & Simulation (HPCS’08) and in Conjunction with the 22nd European Conference on Modeling and Simulation (ECMS 2008), Nicosia, Cyprus, 3–6 June 2008; pp. 297–303. [Google Scholar]
- Ruiz, P.; Dorronsoro, B.; Bouvry, P.; Tardón, L. Information dissemination in VANETs based upon a tree topology. Ad Hoc Netw. 2012, 10, 111–127. [Google Scholar] [CrossRef] [Green Version]
- Bilal, S.M.; Bernardos, C.J.; Guerrero, C. Position-based Routing in Vehicular Networks: A Survey. J. Netw. Comput. Appl. 2013, 36, 685–697. [Google Scholar] [CrossRef]
- Pal, R.; Gupta, N.; Prakash, A.; Tripathi, R. Adaptive Mobility and Range Based Clustering Dependent MAC Protocol for Vehicular Ad Hoc Networks. Wirel. Pers. Commun. 2018, 98, 1155–1170. [Google Scholar] [CrossRef]
- Darwish, T.; Abu Bakar, K. Traffic Density Estimation in Vehicular Ad hoc Networks: A Review. Ad Hoc Netw. 2015, 24, 337–351. [Google Scholar] [CrossRef]
- Benkerdagh, S.; Duvallet, C. Cluster-based Emergency Message Dissemination Strategy for VANET using V2V Communication. Int. J. Commun. Syst. 2019, e3897. [Google Scholar] [CrossRef]
- Busson, A. Analysis and Simulation of a Message Dissemination Algorithm for VANET. Int. J. Commun. Syst. 2011, 24, 1212–1229. [Google Scholar] [CrossRef]
- Mohammed Nasr, M.; Abdelgader, A.; Wang, Z.-G.; Shen, L.-F.; Mohammed Nasr, M.M.; Abdelgader, A.M.S.; Wang, Z.-G.; Shen, L.-F. VANET Clustering Based Routing Protocol Suitable for Deserts. Sensors 2016, 16, 478. [Google Scholar] [CrossRef]
- Na Nakorn, K.; Rojviboonchai, K. Non-GPS Data Dissemination for VANET. Int. J. Distrib. Sens. Netw. 2014, 10, 906084. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, X.; Lu, C.; Chen, S. Distributed and Weighted Clustering based on d-Hop Dominating Set for Vehicular Networks. KSII Trans. Internet Inf. Syst. 2016, 10, 1661–1678. [Google Scholar]
- Sun, M.T.; Feng, W.C.; Lai, T.H.; Yamada, K.; Okada, H.; Fujimura, K. GPS-based message broadcasting for inter-vehicle communication. In Proceedings of the 2000 International Conference on Parallel Processing, Toronto, ON, Canada, 21–24 August 2000; pp. 279–286. [Google Scholar]
- Sun, W.; Xia, F.; Ma, J.; Fu, T.; Sun, Y. An Optimal ODAM-Based Broadcast Algorithm for Vehicular Ad-Hoc Networks. KSII Trans. Internet Inf. Syst. 2012, 6, 3257–3274. [Google Scholar] [CrossRef]
- Casteigts, A.; Chaumette, S. Dynamicity Aware Graph Relabeling Systems (DA-GRS), A Local Computation based Model to Describe Manet Algorithms. In Proceedings of the Parallel and Distributed Computing and Systems, Innsbruck, Austria, 15–17 February 2005; pp. 231–236. [Google Scholar]
- Ros, F.J.; Ruiz, P.M.; Stojmenovic, I. Acknowledgment-Based Broadcast Protocol for Reliable and Efficient Data Dissemination in Vehicular Ad Hoc Networks. IEEE Trans. Mob. Comput. 2012, 11, 33–46. [Google Scholar] [CrossRef]
- Khan, A.; Cho, Y.-Z. Beacon-Less Broadcast Protocol for Vehicular Ad Hoc Networks. KSII Trans. Internet Inf. Syst. 2014, 8, 1223–1236. [Google Scholar]
- Farhan Aadil, S.K.; Bajwa, K.B.; Ali, M.F.K.A. Intelligent Clustering in Vehicular ad hoc Networks. KSII Trans. INTERNET Inf. Syst. 2016, 10, 3512–3526. [Google Scholar]
- Renê, O.; Carlos, M.; Azzedine, B.; Michelle, S.W. Reliable Data Dissemination Protocol for VANET Traffic Safety Applications. Ad Hoc Netw. 2017, 63, 30–44. [Google Scholar]
- Nguyen, T.D.T.; Le, T.-V.; Pham, H.-A. Novel Store–Carry–Forward Scheme for Message Dissemination in Vehicular Ad-hoc Networks. ICT Express 2017, 3, 193–198. [Google Scholar] [CrossRef]
- Clark, B.N.; Colbourn, C.J.; Johnson, D.S. Unit Disk Graphs. Ann. Discret. Math. 1991, 48, 165–177. [Google Scholar]
- Karp, R.M. Reducibility among Combinatorial Problems. In Complexity of Computer Computations; Springer: Boston, MA, USA, 1972; pp. 85–103. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Authors | Protocol Used | Technique Used | Performance Metrics | Advantages | Disadvantages |
|---|---|---|---|---|---|---|
| 1. | Sun et al. (2000) [24] | V-TRADE | Distanced-based; select the farthest vehicle in each direction | Bandwidth Utilization, Reachability | Less bandwidth consumption | Intermittent connectivity not addressed |
| 2. | Sun et al. (2000) [24] | HV-TRADE | Distanced-based; select the farthest vehicle in each direction | Bandwidth Utilization, Reachability | High reachability | Intermittent connectivity not addressed |
| 3. | Ruiz et al. (2008) [14] | BODYF | Topology-based; select the internal nodes of the superimposed tree topology | Bandwidth Utilization, Reachability | Less bandwidth consumption, high reachability | The existence of tree topology constructed by some unicast protocol is assumed; Dissemination is slower since the forwarder has to wait for its turn to get the token |
| 4. | Sun et al. (2012) [25] | ODAM-C | Select the farthest vehicle; discard duplicate packets by maintaining lists | Packet Delivery Ratio, End-to-End Delay, Redundancy in transmission | High reachability | Maintenance of timers for each packet received to identify duplicate packets |
| 5. | Khan and Cho, (2014) [28] | BL-CAST | Distance-based; select the farthest vehicle by initialising wait timers which are inversely proportional to the distance from the sender | End-to-End Delay, Message Delivery Ratio, Network Overhead | Less delay, high reachability, less bandwidth consumption | Maintenance of timers for each packet received |
| 6. | Aadil et al. (2016) [29] | ACONET | Distance and speed based; select the forwarder using ant colony optimization | Cluster size, LBF (Load Balancing Factor) | Stable c lustering, optimum number of cluster members per cluster | Proper tuning of parameters (weights assigned to each factor) is necessary |
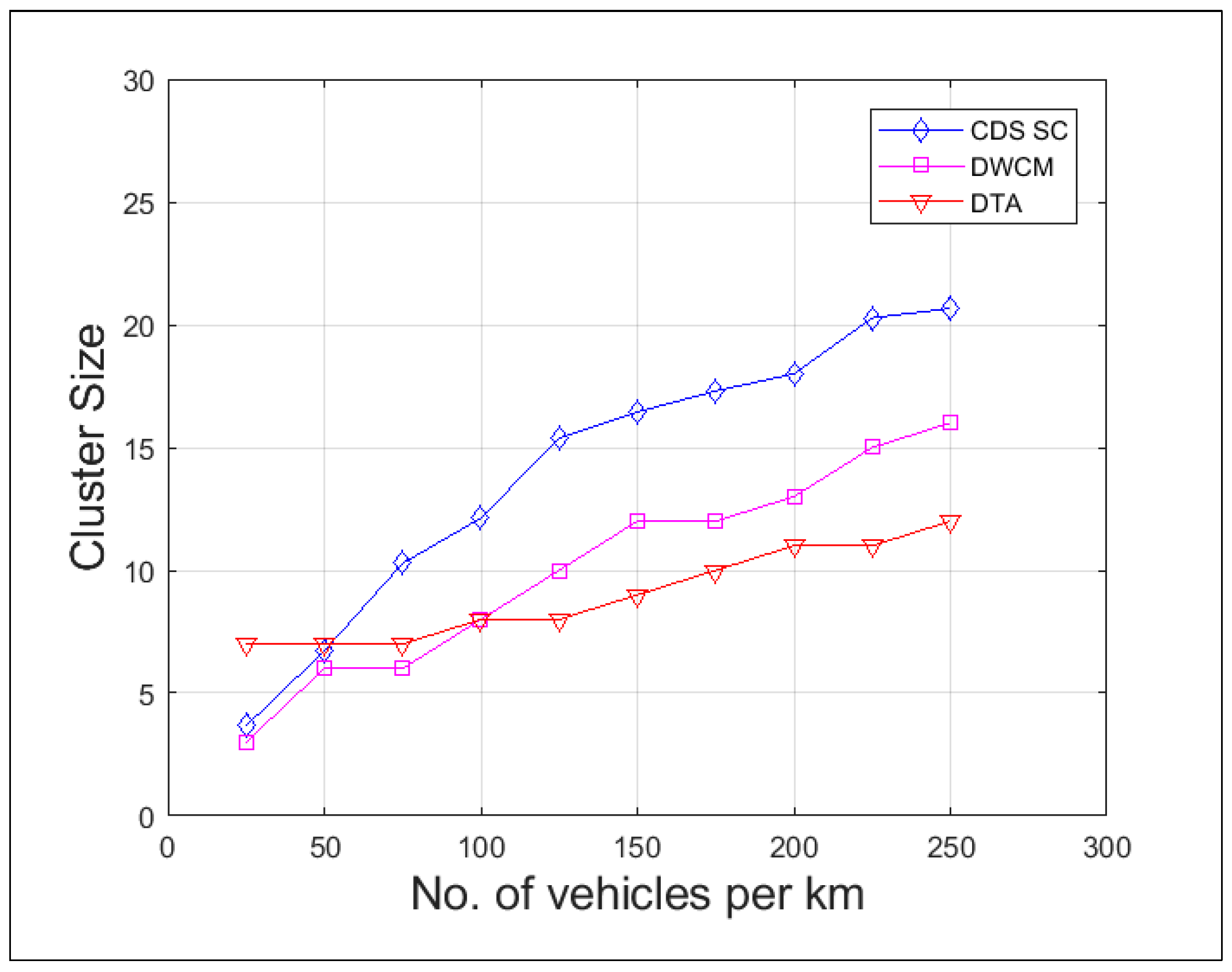
| 7. | Nakorn and Rojviboonchai (2014) [22] | DTA | Density and topology-based; select dominators of approximate connected dominating set as cluster heads | Reachability, Cluster head Density | High reachability, fast dissemination | High bandwidth consumption |
| 8. | Shi et al. (2016) [23] | DWCM | Topology and speed based; selects the vehicle that has the highest priority among its d-hop neighbours or its d-hop neighbours of d-hop neighbours | Mean cluster head lifetime, Mean re-affiliation time, Number of clusters | Stable clustering | Maintenance of neighbours in d hops and their neighbours; In dense networks, more number of cluster gateways results in unnecessary rebroadcasts |
| 9. | Ros et al. (2012) [27] | ABSM | Location-based; connected dominating set with neighbour elimination scheme | Packet Delivery Ratio, Control Overhead, End-to-End Delay | High reachability, less delay, low overhead, fast dissemination | Maintenance of timers for each packet received; Existence of an efficient algorithm for computing CDS is assumed; |
| 10. | Renê et al. (2017) [30] | Mobility-based scheme for dynamic clustering | Location and speed based; all vehicles within given safer distance will become the CM; The farthest vehicle outside the safer distance in each direction is notified to be a CH | No. of Clusters, CH duration, CM duration, CH change rate, CM connection frequency, Clustering Efficiency | High cluster stability | Temporary CH is required to initiate the clustering process; CH has to maintain a list of its CMs, High bandwidth overhead |
| 11. | Nguyen et al. (2017) [31] | SCF | Distance-based; A vehicle at the edge of a cluster is selected as store-and-carry forwarder if there is no other neighbor vehicle exists within the normalized heading direction between the source and current forwarder | Coverage, Delay, Collision ratio, Message overhead, Efficiency | High reachability | Delay during low-vehicle density; Higher collision ratio during high vehicle density |
| Notation | Description |
|---|---|
| Vehicle Id | |
| Direction of Movement of Vehicle | |
| State of Vehicle (white, black, blue, red, yellow, grey) | |
| Speed of Vehicle | |
| Cluster Id | |
| Set of all Neighbour Vehicles’ Ids | |
| Cluster Head | |
| Gateway | |
| Candidate Cluster Head | |
| Candidate Gateway | |
| Degree of Cohesion of Vehicle | |
| Relative Mobility between Vehicle and Vehicle | |
| Distance between Vehicle and Vehicle |
| Parameter | Value |
|---|---|
| Total No. of vehicles injected | 1000 |
| No. of lanes per direction | 4 |
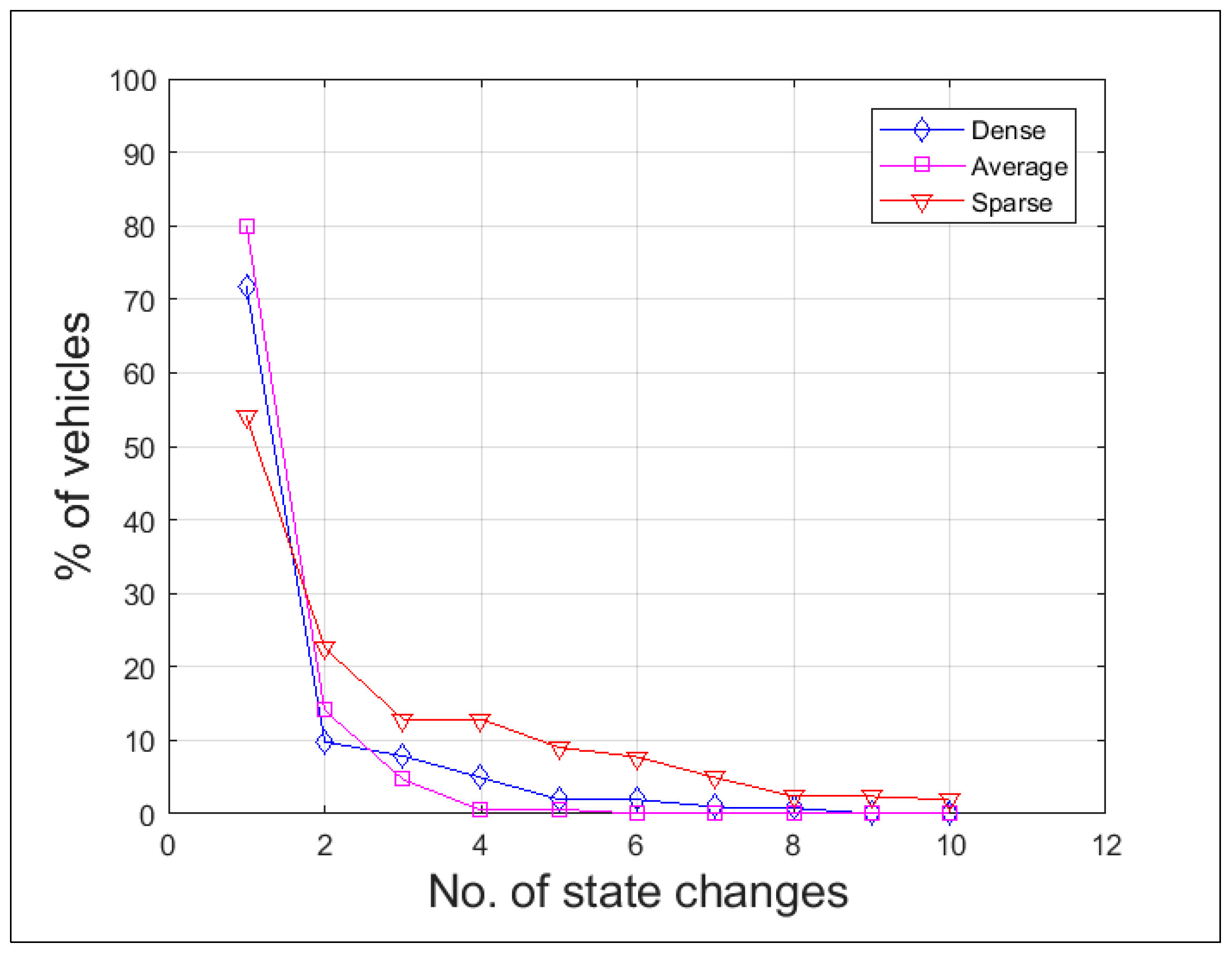
| No. of vehicles per km per direction | 0–15 (Sparse), 16–30 (Average), 31–50 (Dense) |
| Beacon interval | 100 ms (Sparse), 150 ms (Average), 300 ms (Dense) |
| Transmission range | 250 m |
| MAC Protocol standard | IEEE 802.11p |
| Propagation model | Two-Ray Ground |
| Vehicle speed | 7 m/s to 27 m/s |
| Simulation time | 2 h |
| Lifetime for message | 30 min |
| Region of interest | 5 km from the place of incident |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamakshi, S.; Shankar Sriram, V.S. Plummeting Broadcast Storm Problem in Highways by Clustering Vehicles Using Dominating Set and Set Cover. Sensors 2019, 19, 2191. https://doi.org/10.3390/s19092191
Kamakshi S, Shankar Sriram VS. Plummeting Broadcast Storm Problem in Highways by Clustering Vehicles Using Dominating Set and Set Cover. Sensors. 2019; 19(9):2191. https://doi.org/10.3390/s19092191
Chicago/Turabian StyleKamakshi, S., and V. S. Shankar Sriram. 2019. "Plummeting Broadcast Storm Problem in Highways by Clustering Vehicles Using Dominating Set and Set Cover" Sensors 19, no. 9: 2191. https://doi.org/10.3390/s19092191