Acoustic Localization of Bragg Peak Proton Beams for Hadrontherapy Monitoring †


Abstract
:1. Introduction
2. Overview of Approach
Newton-Raphson Method
3. Thermoacoustic Simulation
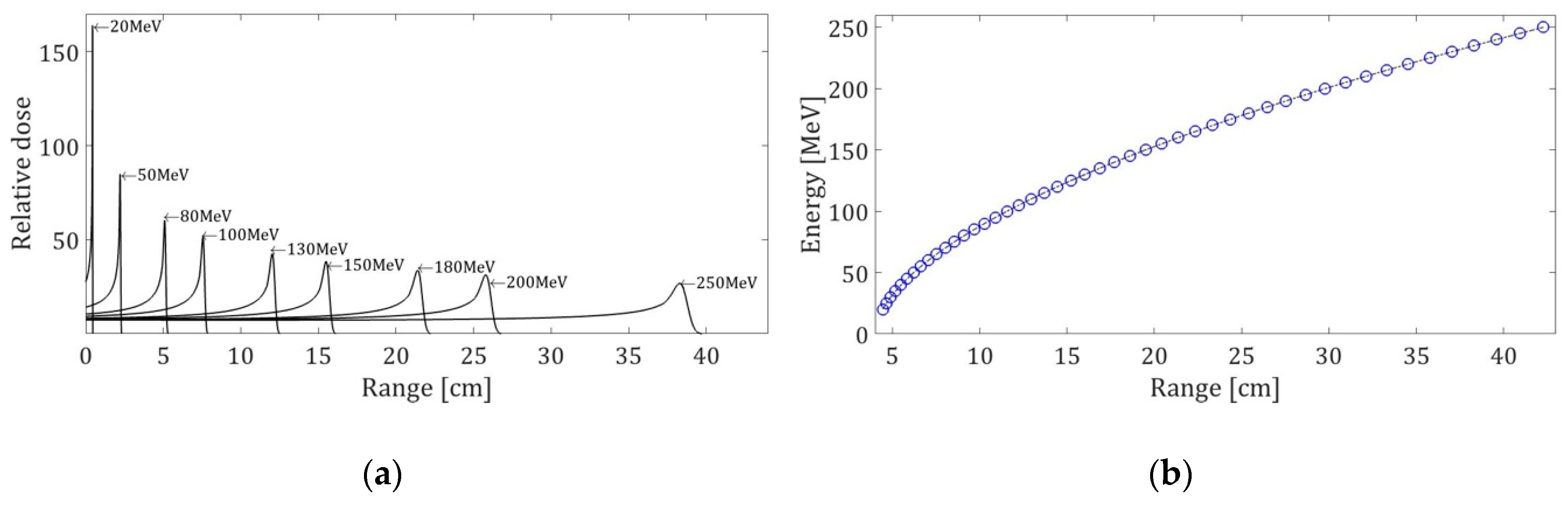
3.1. Bragg Peak
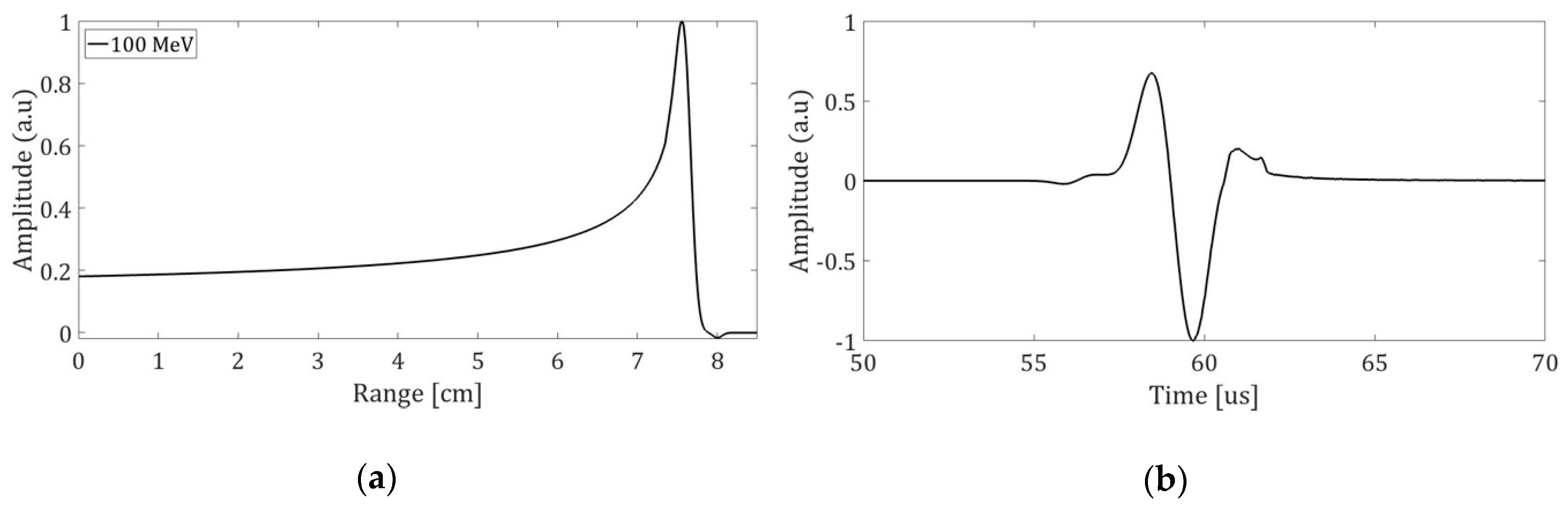
3.2. Thermoacoustic Model
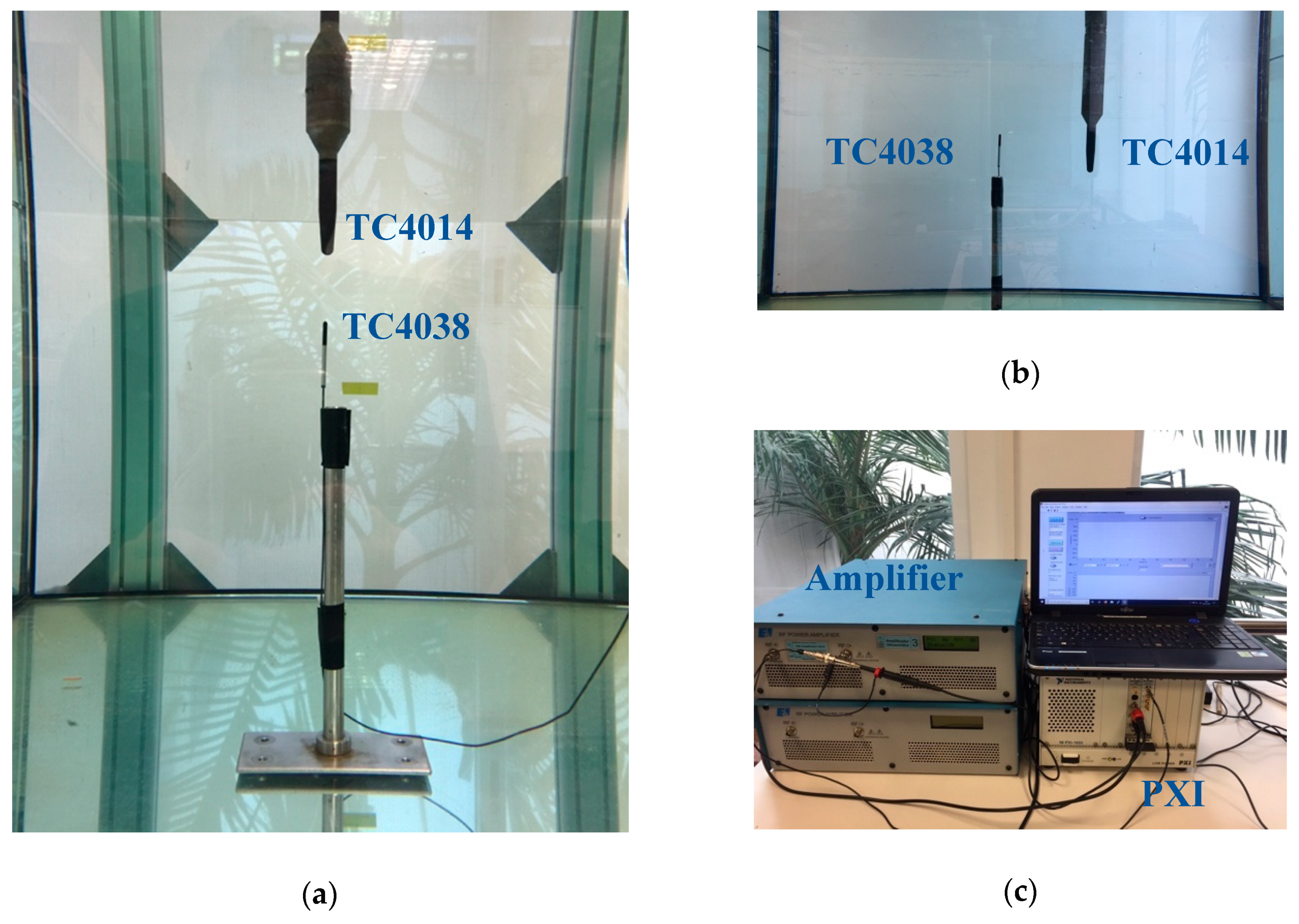
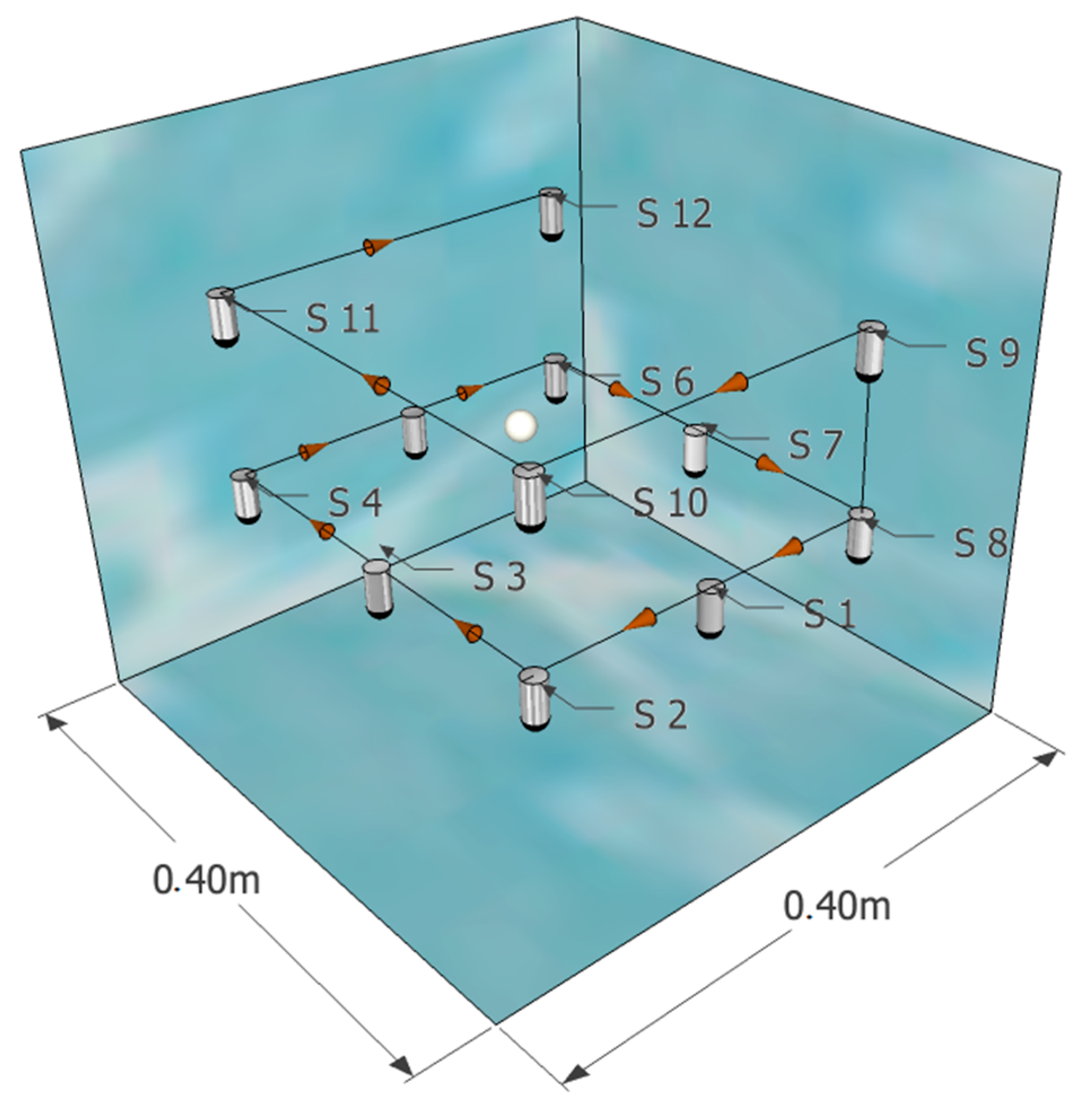
4. Experimental Setup
5. Studies and Results
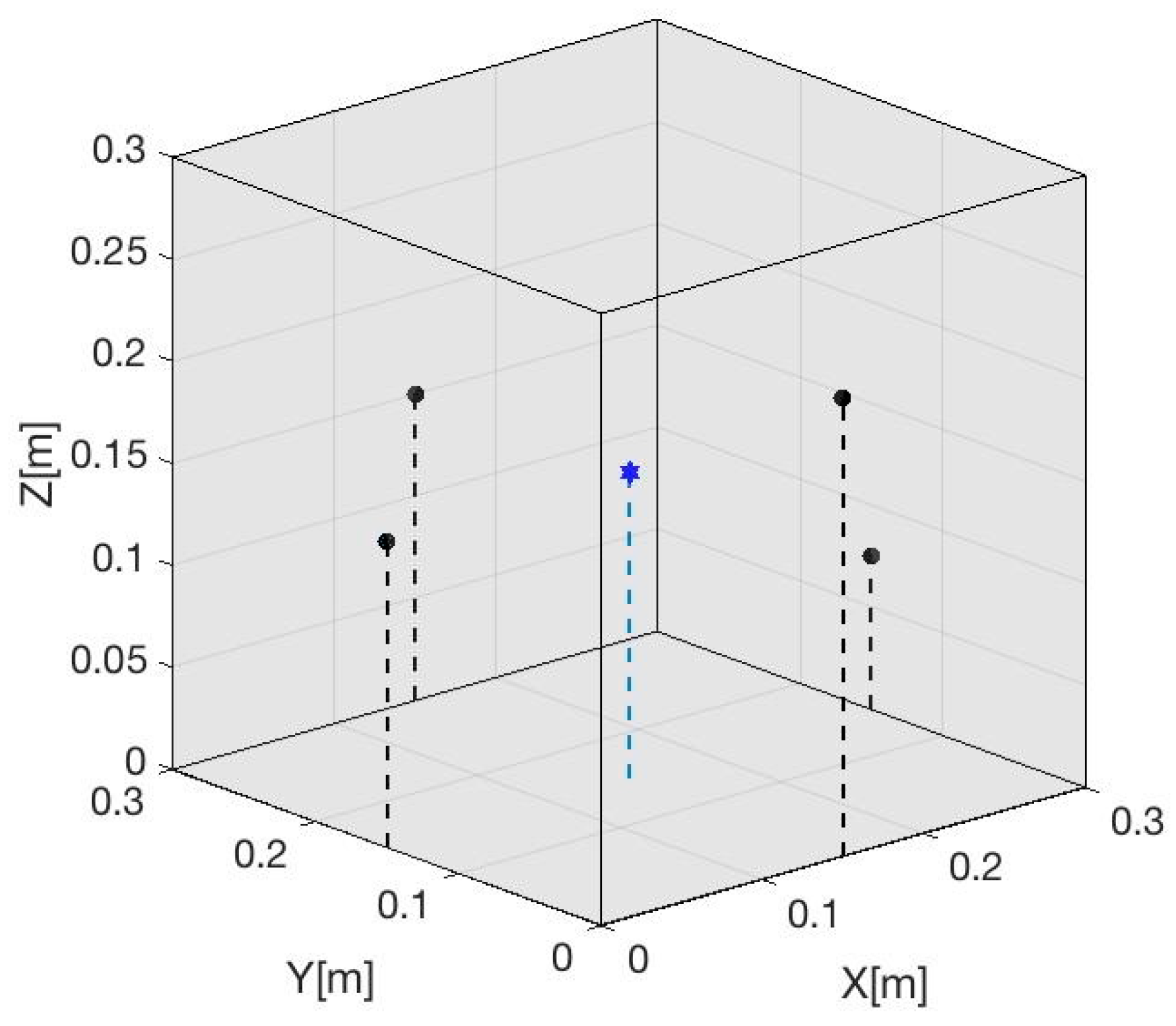
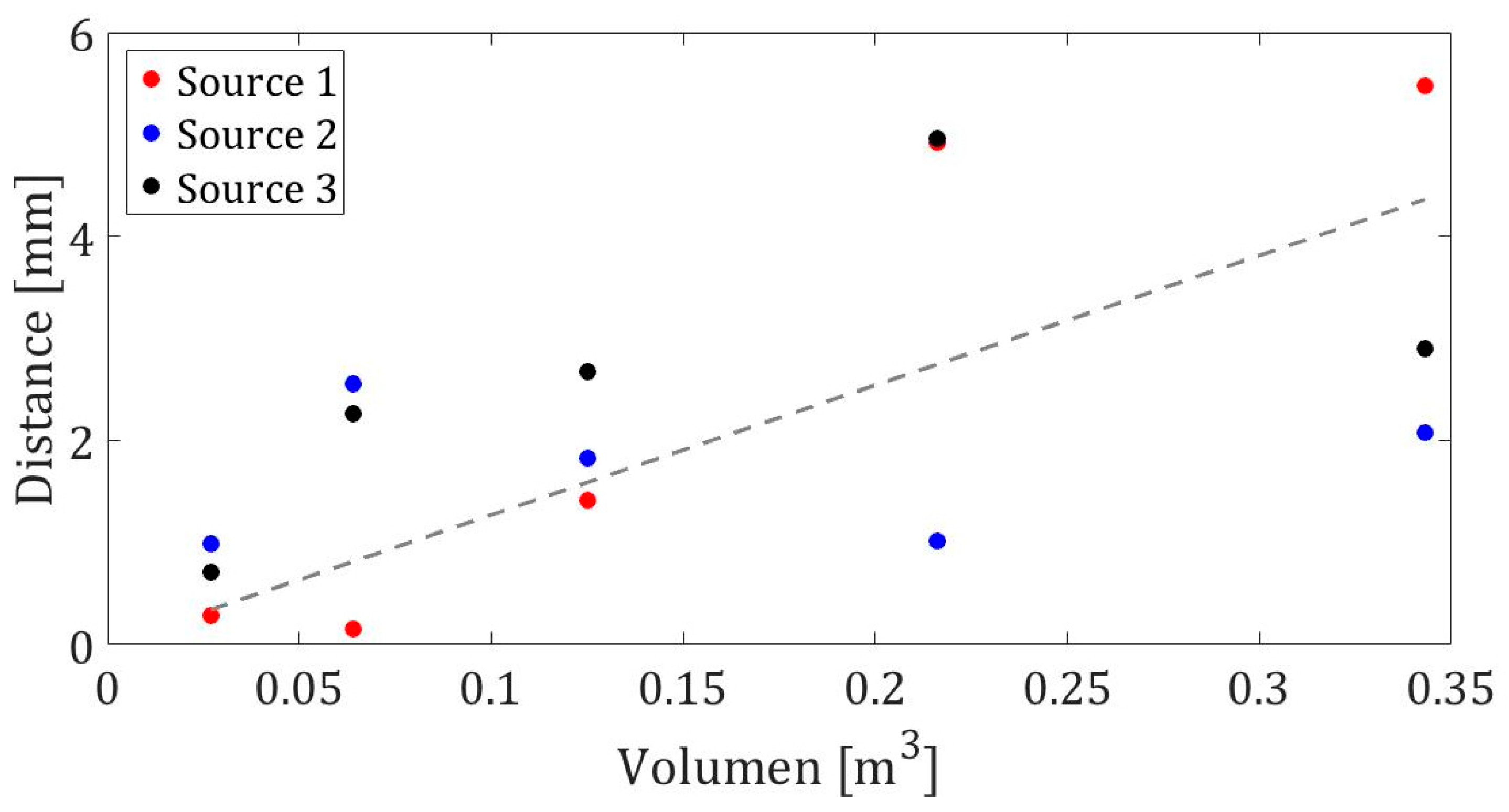
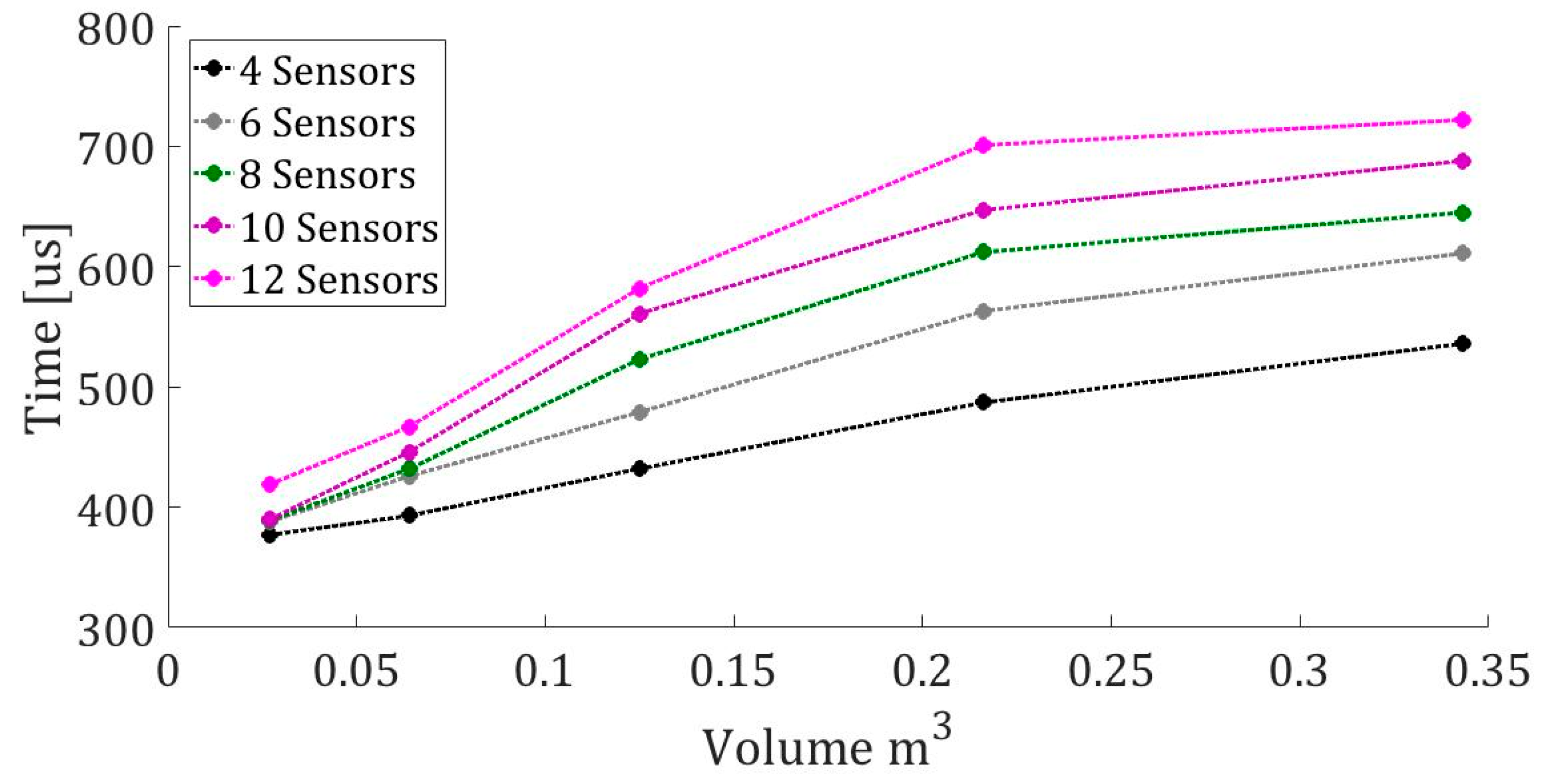
5.1. Numerical Simulation
5.2. Experimental Localization with Thermoacoustic Signals
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kundu, T. Acoustic source localization. Ultrasonics 2014, 54, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Moore, D.; Leonard, J.; Daniela, R.; Teller, S. Robust distributed network localization with noisy range measurements. In Proceedings of the 2nd International Conference on Enbedded Networked Sensor Systems SenSy 04, Baltimore, MD, USA, 3–5 November 2004. [Google Scholar]
- Niculescu, D.S. Ad Hoc Positioning System (APS. In Proceedings of the Global Telecommunications Conference, San Francisco, CA, USA, 3–6 August 2001. [Google Scholar]
- Bortfeld, T. An analytical approximation of the Bragg curve for therapeutic proton beams. Med. Phys. 1998, 24, 2024–2033. [Google Scholar] [CrossRef] [PubMed]
- Gustafsson, F.; Gunnarsson, F. Positioning using time-difference of arrival measurements. In Proceedings of the International Conference on Acoustic, Speech and Signal Processing, Hong Kong, China, 6–10 April 2003. [Google Scholar]
- Otero, J.; Ardid, M.; Felis, I.; Herrero, A. Acoustic location of Bragg peak for Hadrontherapy Monitoring. In Proceedings of the 5th International Electronic Conference on Sensors and Applications, 15–30 November 2018. [Google Scholar]
- Ahmad, M.; Xiang, L.; Yousefi, S.; Xing, L. Theoretical detection threshold of the proton-acoustic range verification technique. Med. Phys. 2015, 42, 5735–5744. [Google Scholar] [CrossRef] [PubMed]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Adrián-Martínez, S.; Ardid, M.; Bou-Cabo, M.; Felis, I.; Llorens, C.; Martínez-Mora, J.A.; Saldaña, M. Acoustic signal detection through the cross-correlation method in experiments with different signal to noise ratio and reverberation conditions. Ad-Hoc Netw. Wirel. 2015, 8629, 66–79. [Google Scholar]
- Felis, I.; Martínez-Mora, J.; Ardid, M. Acoustic Sensor Design for Dark Matter Bubble Chamber Detectors. Sensors 2016, 16, 860. [Google Scholar] [CrossRef] [PubMed]
- Chapra, S.; Canale, R. Raíces de ecuaciones. In Métodos Numéricos para Ingenieros; Médico D.F, Edifi cio Punta Santa Fe: Ciudad de México, México, 2007; pp. 142–167. [Google Scholar]
- Bragg, W.; Kleeman, R. On the α-particles of radium and their loss of range in passing through various atoms and molecules. Lond. Edingurgh Dublin Philos. Mag. J. Sci. 1905, 10, 318–340. [Google Scholar] [CrossRef]
- Schardt, D. Hadronteraphy. In Basic Concepts in Nuclear Physics: Theory, Experiments and Applications; Suiza, Springer: Berlin, Germany, 2015; pp. 55–86. [Google Scholar]
- Janni, J.F. Energy loss, range, path lenght, time-of-flight, straggling, multiple scattering, and nuclear interaction probability: In two parts. Part 1. For 63 compounds Part 2. For elements 1 < Z < 92. At. Data Nucl. Data Tables 1982, 27, 147–339. [Google Scholar]
- Jones, K.; Seghal, C.; Avery, S. How proton pulse characteristics influence protoacoustic determination of proton-beam range: Silumation studies. Phys. Med. Biol. 2016, 61, 2213–2242. [Google Scholar] [CrossRef]
- Lai, H.M.; Young, K. Theory of the pulsed optoacoustic technique. J. Acoust. Soc. Am. 1982, 72, 2000. [Google Scholar] [CrossRef]
- Sigrist, M.W. laser generation of acoustic waves in liquids and gases. J. Appl. Phys. 1986, 60, R83. [Google Scholar] [CrossRef]
- Tam, A.C. Applications of photoacoustic sensing techniques. Rev. Mod. Phys. 1986, 58, 381–431. [Google Scholar]
- Xiang, L.; Carpenter, C.; Pratx, G.; Kuang, Y.; Xing, L. X-ray acoustic computed tomography with pulsed x-ray beam from a medical linear accelerator. Med. Phys. Lett. 2013, 40, 010701. [Google Scholar] [CrossRef] [PubMed]
- Assmann, W.; Kellnberger, S.; Reinhardt, S.; Lehrack, S.; Edlich, A.; Thirolf, P.G.; Moser, M.; Dollinger, G.; Omar, M.; Ntziachristos, V.; et al. Ionoacoustic characterization of the proton Bragg peak with submillimeter accuracy. Med. Phys. 2015, 42, 567–574. [Google Scholar] [CrossRef] [PubMed]
- Bonis, G.D. Acoustic signals from proton beam interaction in water—Comparing experimental data and Monte Carlo simulation. Nucl. Instrum. Methods Phys. Res. Sect. A 2009, 604, 199–202. [Google Scholar] [CrossRef]
- Kraan, A.C.; Battistoni, G.; Belcari, N.; Camarlinghi, N.; Cirrone, G.A.; Cuttone, G.; Ferretti, S.; Ferrari, A.; Pirrone, G.; Romano, F.; et al. Proton range monitoring with in-beam PET: Monte Carlo activity predictions and comparision with cyclotron data. Phys. Med. 2014, 30, 559–569. [Google Scholar] [CrossRef] [PubMed]
- Patch, S.; Hoff, D.; Webb, T.; Sobotka, G.; Zhao, T. Two-stage ionoacoustic range verification leveraging Monte Carlo and acoustic simulations to stably account for tissue inhomogeneity and accelerator–specific time structure—A simulation study. Med. Phys. 2017, 45, 783–793. [Google Scholar] [CrossRef] [PubMed]
- Lehrack, S.; Assmann, W.; Bertrand, D.; Henrotin, S.; Herault, J.; Heymans, V.; Stappen, F.V.; Thirolf, P.G.; Vidal, M.; Van de Walle, J.; et al. Submillimeter ionoacoustic range determination for protons in water at a clinical synchrocyclotron. Phys. Med. Biol. 2017, 62, 20–30. [Google Scholar] [CrossRef] [PubMed]
- Hickling, S.; Lei, H.; Hobson, M.; Léger, P.; Wang, X.; EI Naqa, I. Experimental evaluation of x-ray acoustic computed tomography for radiotherapy dosimetry applications. Med. Phys. 2016, 44, 608–617. [Google Scholar] [CrossRef] [PubMed]
- Ardid, M.; Felis, I.; Martínez-Mora, J.A.; Otero, J. Optimization of Dimensions of Cylindrical Piezoceramics as Radio-Clean Low Frequency Acoustic Sensors. J. Sens. 2017, 2017, 8179672. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axis | Sensors | Source (mm) | |||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 1 | 2 | 3 | |
| X | H/2 | 0.0 | H/2 | H | 100 | 100 | 80 |
| Y | 0.0 | H/2 | H | H/2 | 100 | 180 | 100 |
| Z | 3H/4 | H/2 | H/2 | H/4 | 100 | 150 | 180 |
| Coord. | Real Position (mm) | Estimated Position (mm) for the Volume (m3) | ||||
|---|---|---|---|---|---|---|
| X | 100 | 99.89 ± 0.07 | 100.03 ± 0.02 | 100.79 ± 0.55 | 101.97 ± 1.72 | 97.84 ± 1.50 |
| Y | 100 | 99.94 ± 0.04 | 100.02 ± 0.01 | 100.63 ± 0.45 | 102.26 ± 1.91 | 97.19 ± 2.02 |
| Z | 100 | 99.75 ± 0.17 | 99.85 ± 0.10 | 100.99 ± 0.70 | 103.90 ± 2.06 | 95.83 ± 2.91 |
| X | 100 | 100.63 ± 0.45 | 99.64 ± 0.03 | 100.19 ± 0.01 | 100.41 ± 0.01 | 98.94 ± 0.40 |
| Y | 180 | 179.45 ± 0.38 | 178.55 ± 0.10 | 180.68 ± 0.01 | 180.39 ± 0.01 | 179.44 ± 0.42 |
| Z | 150 | 150.52 ± 0.37 | 147.92 ± 1.55 | 151.68 ± 0.12 | 150.84 ± 0.01 | 148.31 ± 1.12 |
| X | 80 | 79.80 ± 0.13 | 80.87 ± 0.60 | 78.65 ± 1.02 | 78.43 ± 1.11 | 78.52 ± 1.01 |
| Y | 100 | 100.04 ± 0.03 | 101.04 ± 0.71 | 98.67 ± 0.92 | 96.33 ± 2.61 | 98.43 ± 1.10 |
| Z | 100 | 99.32 ± 0.47 | 101.81 ± 1.30 | 98.20 ± 1.32 | 97.05 ± 2.08 | 98.07 ± 1.42 |
| Axis | Sources Position | Sensor Positions [cm] | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | ||
| X | 54.0 | 70.5 | 70.5 | 56.5 | 42.5 | 42.5 | 42.5 | 56.5 | 70.5 | 70.5 | 70.5 | 42.5 | 42.5 |
| Y | 53.0 | 53.0 | 40.5 | 40.5 | 40.5 | 53.0 | 65.0 | 65.0 | 65.0 | 65.0 | 40.5 | 40.5 | 65.0 |
| Z | 38.0 | 31.0 | 31.0 | 31.0 | 31.0 | 31.0 | 31.0 | 31.0 | 31.0 | 43.0 | 43.0 | 43.0 | 43.0 |
| Group | Number of Sensors | Sensor | Estimated Location [cm] | ||
|---|---|---|---|---|---|
| X | Y | Z | |||
| 1 | 4 | 2, 4, 6, 8 | 53.080.87 | 53.10.31 | 30.20.72 |
| 2 | 4 | 9, 10, 11, 12 | 53.170.18 | 53.120.25 | 27.310.21 |
| 3 | 4 | 6, 8, 9, 12 | 54.45 | 60.04.61 | 37.79.02 |
| 4 | 4 | 2, 4, 10, 11 | 53.11 | 53.050.50 | 38.280.41 |
| 5 | 4 | 3, 4, 9, 11 | 53.980.44 | 53.010.44 | 37.980.70 |
| 6 | 4 | 1, 4, 9, 12 | 53.990.20 | 53.030.70 | 37.97.21 |
| 7 | 6 | 2, 5, 7, 9, 11, 12 | 53.990.10 | 53.010.26 | 38.000.20 |
| 8 | 8 | 1, 3, 4, 6, 7, 8, 10, 11 | 54.010.24 | 53.010.12 | 38.010.35 |
| 9 | 10 | 1, 3, 4, 5, 7, 8, 9, 10, 11, 12 | 54.000.17 | 53.000.14 | 38.010.24 |
| 10 | 12 | All of them | 54.010.17 | 53.000.12 | 37.990.38 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Otero, J.; Felis, I.; Ardid, M.; Herrero, A. Acoustic Localization of Bragg Peak Proton Beams for Hadrontherapy Monitoring. Sensors 2019, 19, 1971. https://doi.org/10.3390/s19091971
Otero J, Felis I, Ardid M, Herrero A. Acoustic Localization of Bragg Peak Proton Beams for Hadrontherapy Monitoring. Sensors. 2019; 19(9):1971. https://doi.org/10.3390/s19091971
Chicago/Turabian StyleOtero, Jorge, Ivan Felis, Miguel Ardid, and Alicia Herrero. 2019. "Acoustic Localization of Bragg Peak Proton Beams for Hadrontherapy Monitoring" Sensors 19, no. 9: 1971. https://doi.org/10.3390/s19091971