Analysis of the Frequency Shift versus Force Gradient of a Dynamic AFM Quartz Tuning Fork Subject to Lennard-Jones Potential Force

Abstract
:1. Introduction
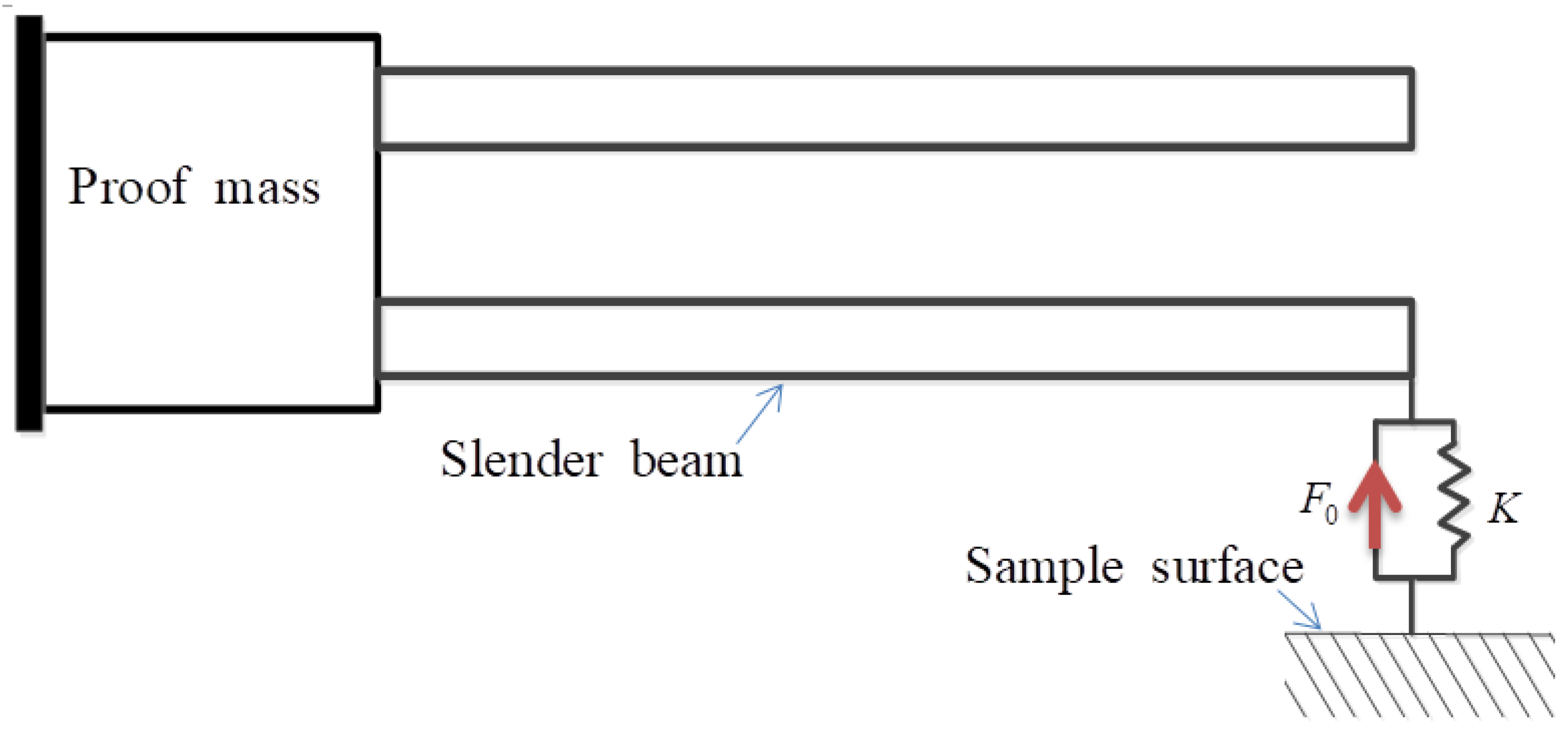
2. The Equations of Motion and the General Solution of the Prong Loaded with Tip-Sample Interaction Force
2.1. The Linearization of the Lennard-Jones Potential Force
2.2. The Deformation and Equations of Motion
2.3. The General Solution of the Lower Loaded Prong
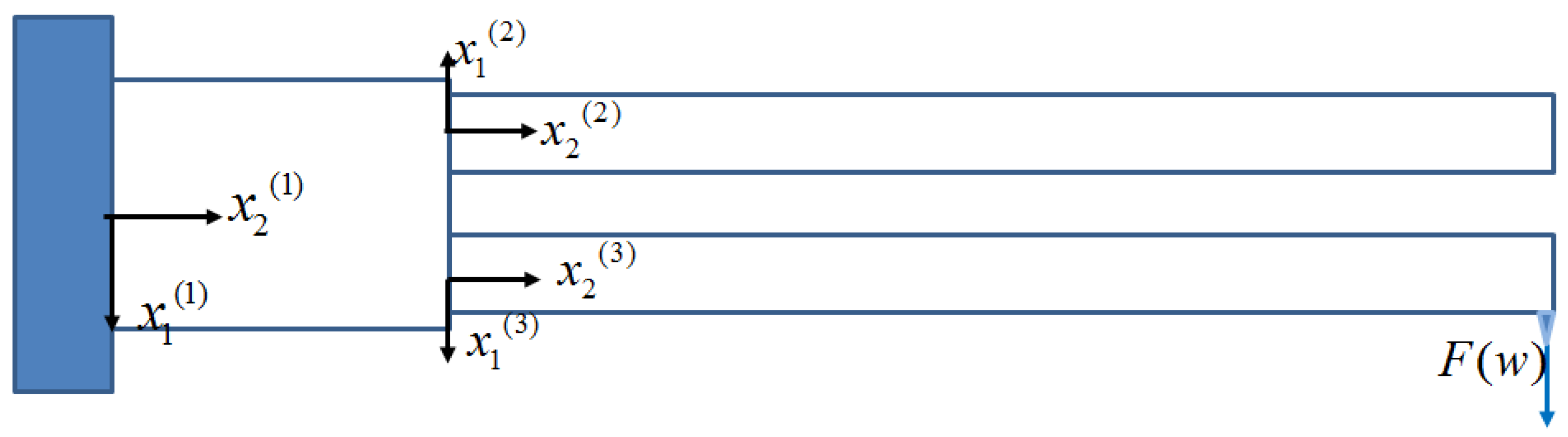
3. The Deformation and Equations of Motion of the Proof Mass
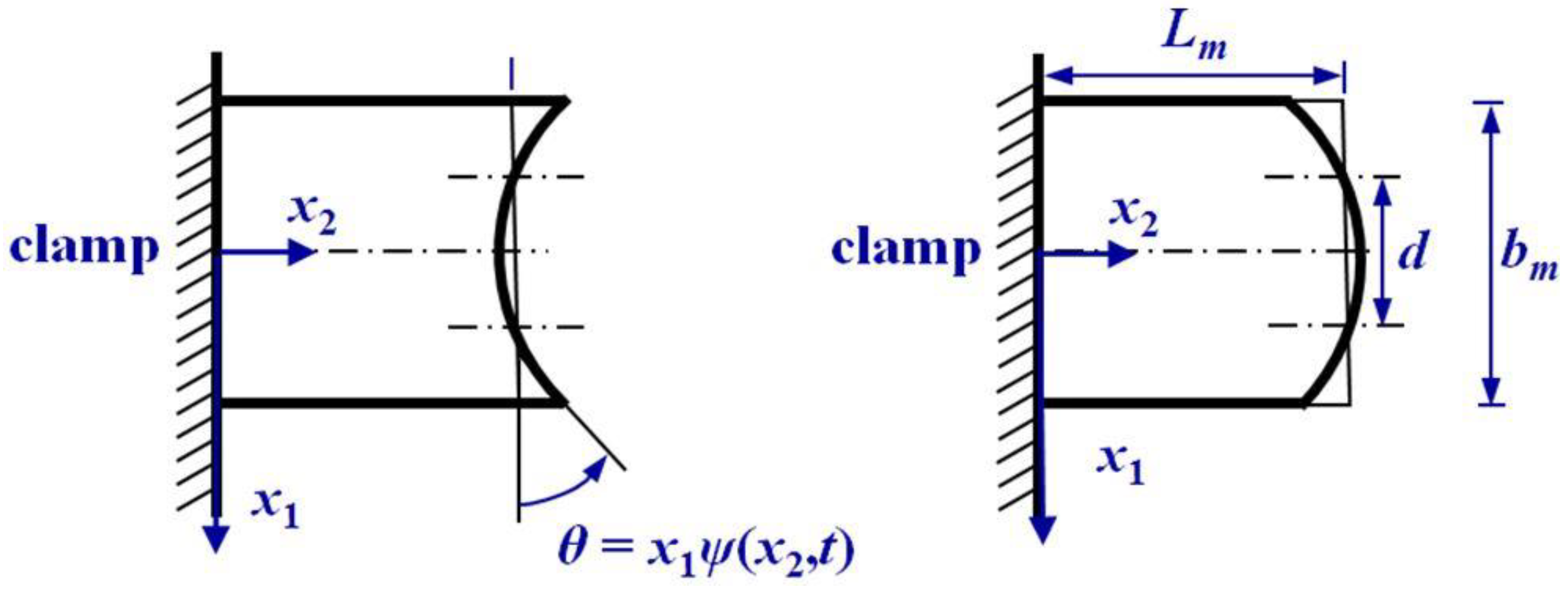
3.1. The Deformation of the Proof Mass
3.1.1. Deformation Due to the Bending Moment of the Tip-Sample Interaction
3.1.2. The Wrapping Deformation of the Proof Mass
3.2. Equations of Motion of the Proof Mass
3.3. General Solution of the Proof Mass
4. Anti-Phase Resonant Frequency of QTF
4.1. Mode Shapes with Undetermined Coefficients
4.2. The Twelve Boundary and Interface Conditions
- ,
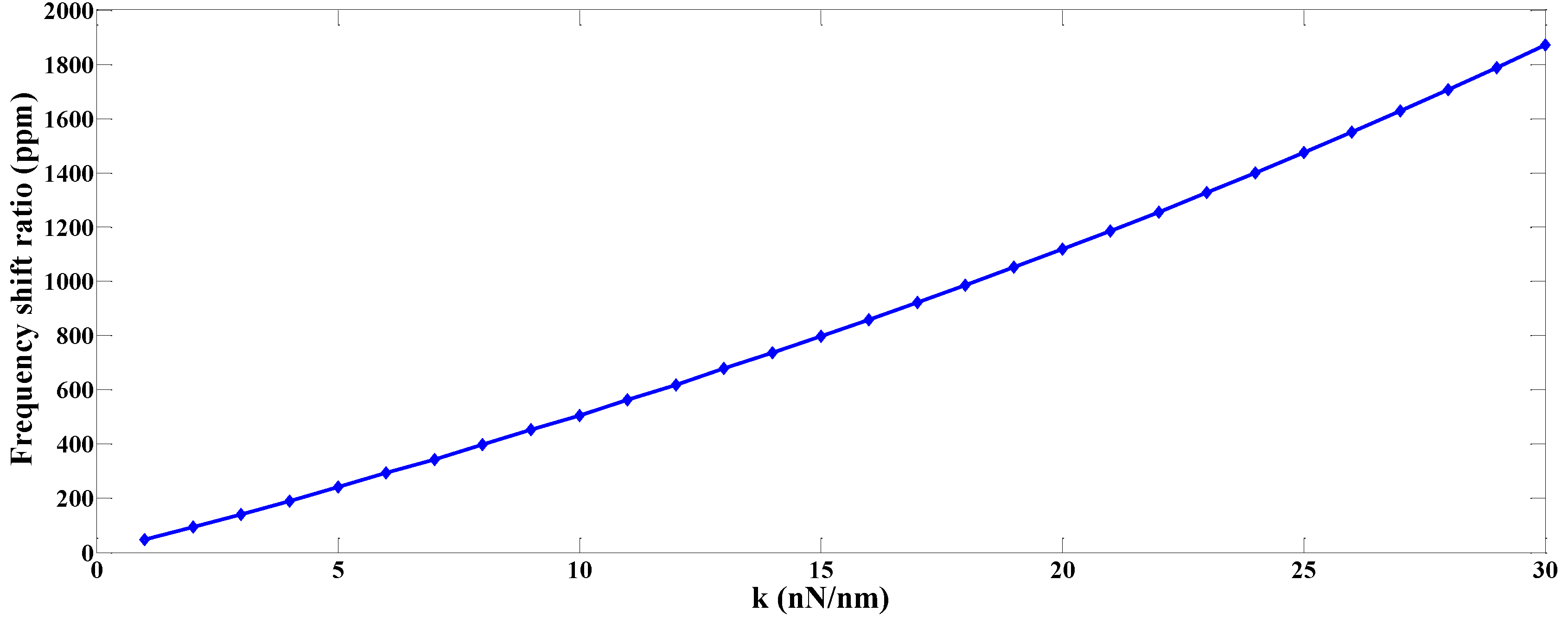
4.3. Results and Discussions
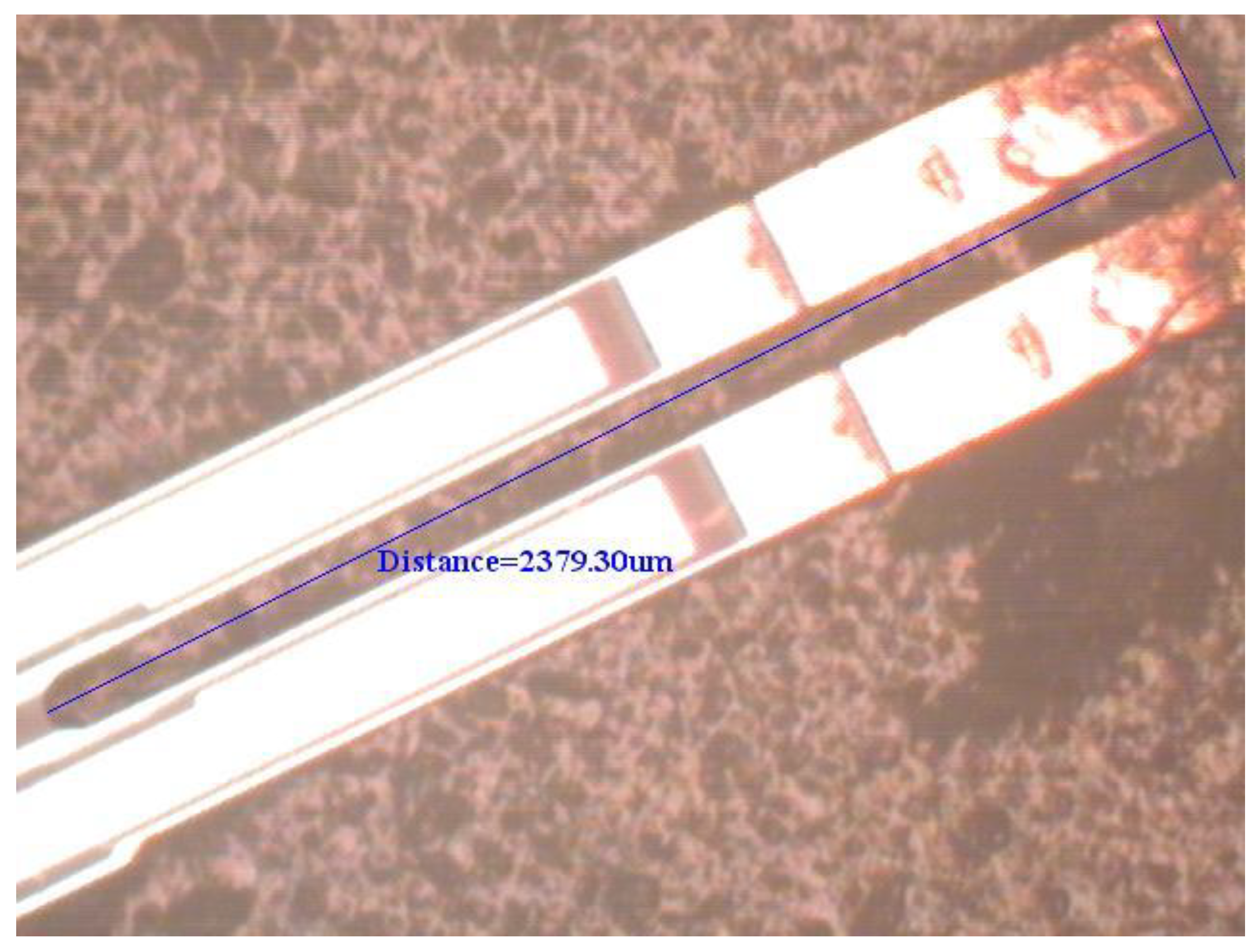
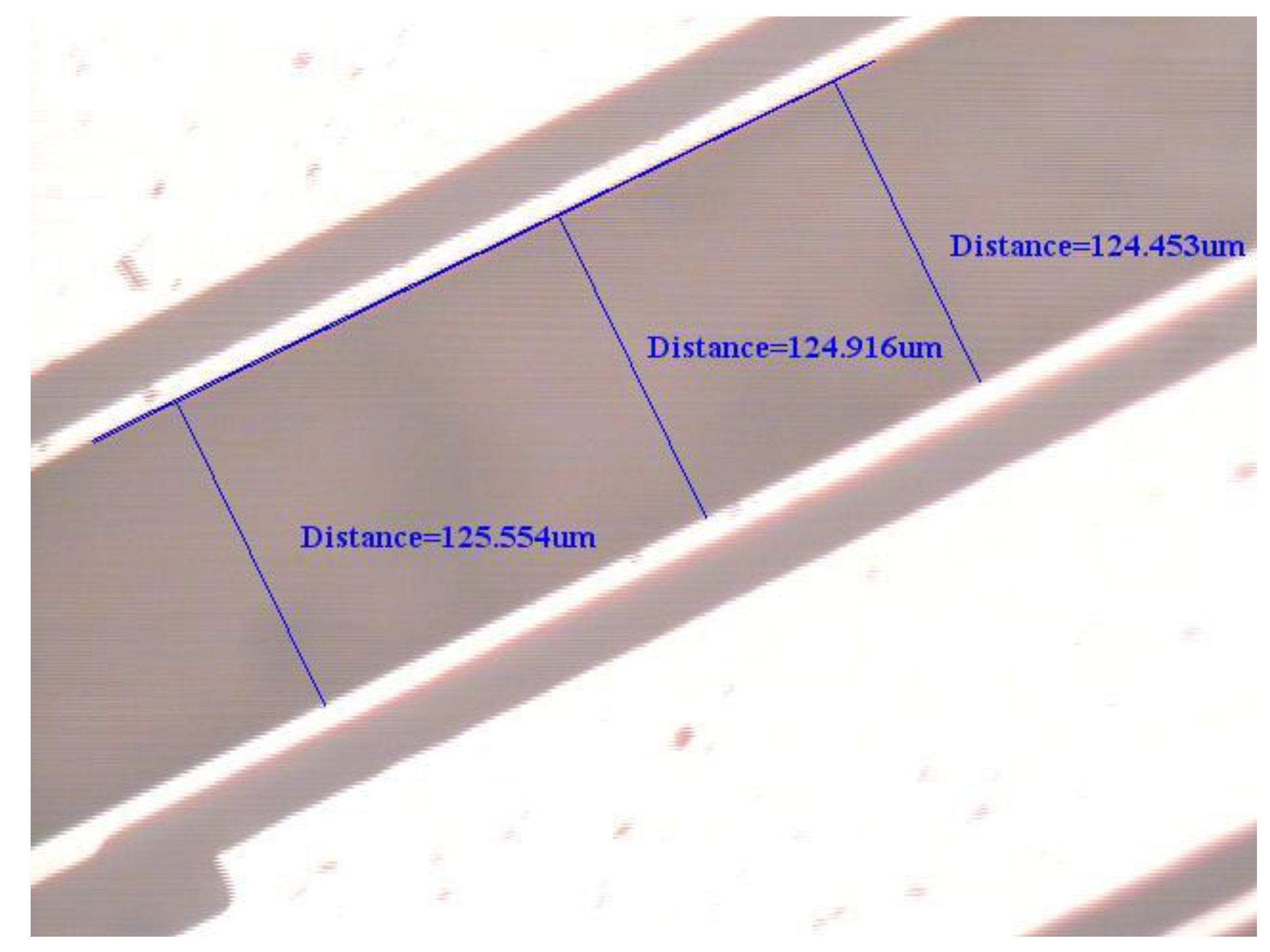
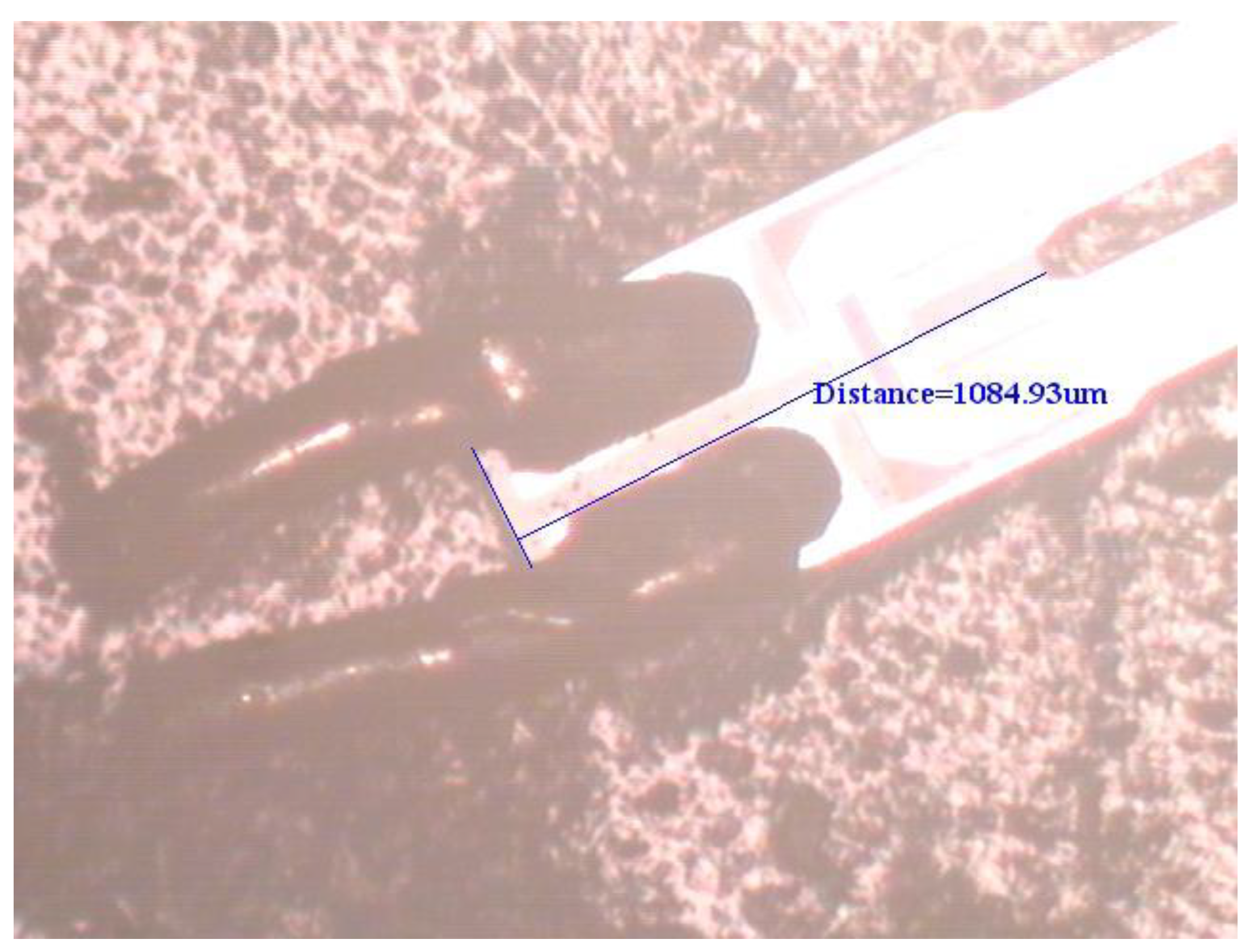
4.4. Experimental Test for the Natural Frequency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
- , ,
- , , ,
- , ,
- , ,
- ,
- ,
- , , ,
- , , ,
- , , ,
- , , ,
- , , ,
- , ,
- ,
- ,
- , , ,
- .
Appendix C
- , ,
- , , ,
- , , ,
- , ,
- , ,
- , ,
- , .
References
- Sokolov, Y.I.; Henderson, G.S.; Wicks, F.J. Model dependence of AFM simulation in non-contact mode. Surf. Sci. 2000, 457, 267–272. [Google Scholar] [CrossRef]
- Rust, H.P; Heyde, M.; Freund, H.J. Signal electronics for an atomic force microscope equipped with a double quartz tuning fork sensor. Rev. Sci. Instrum. 2006, 77, 043710. [Google Scholar] [CrossRef]
- Pawlak, R.; Kawai, S.; Fremy, S.; Glatzel, T.; Meyer, E. High-resolution imaging of C60 molecules using tuning-fork-based non-contact atomic force microscopy. J. Phys. Condems. Matter 2012, 40, 084005. [Google Scholar] [CrossRef] [PubMed]
- Gross, L. Recent advances in submolecular resolution with scanning probe microscopy. Nat. Chem. 2011, 3, 273–278. [Google Scholar] [CrossRef] [PubMed]
- Polesel-Marris, J.; Legrand, J.; Berthelot, T.; Garcia, A.; Viel, P.; Makky, A.; Palacin, S. Force spectroscopy by dynamic atomic force microscopy on bovine serum albumin proteins changing the tip hydrophobicity, with piezoelectric tuning fork self-sensing scanning probe. Sens. Actuators B Chem. 2012, 161, 775–783. [Google Scholar] [CrossRef]
- Dufrêne, Y.F.; Ando, T.; Garcia, R.; Alsteens, D.; Martinez-Martin, D.; Engel, A.; Gerber, C.; Müller, D.J. Imaging modes of atomic force microscopy for application in molecular and cell biology. Nat. Nanotechnol. 2017, 12, 295–307. [Google Scholar] [CrossRef] [Green Version]
- Bayat, D.; Akiyama, T.; de Rooij, N.F.; Staufer, U. Dynamic behavior of the tuning fork AFM probe. Microelectron. Eng. 2008, 85, 1018–1021. [Google Scholar] [Green Version]
- Wu, Z.; Guo, T.; Tao, R.; Liu, L.; Chen, J.; Fu, X.; Hu, X. A unique self-sing, Self-actuating AFM Probe at higher eigenmodes. Sensors 2015, 15, 28764–28771. [Google Scholar] [CrossRef]
- Hussain, D.; Wen, Y.; Zhang, H.; Song, H.; Xie, H. Atomic Force Microscopy Sidewall Imaging with a Quartz Tuning Fork Force Sensor. Sensors 2018, 18, 100. [Google Scholar] [CrossRef]
- Zhang, X.; Gao, F.; Li, X. Sensing Performance Analysis on Quartz Tuning Fork-Probe at the High Order Vibration Mode for Multi-Frequency Scanning Probe Microscopy. Sensors 2018, 18, 336. [Google Scholar] [CrossRef] [PubMed]
- Ooe, H.; Sakuishi, T.; Nogami, M.; Tomitori, M.; Arai, T. Resonance frequency-retuned quartz tuning fork as a force sensor for noncontact atomic force microscopy. Appl. Phys. Lett. 2014, 105, 043107. [Google Scholar] [CrossRef] [Green Version]
- Hölscher, H.; Schwarz, U.D.; Wiesendanger, R. Calculation of the frequency shift in dynamics force microscopy. Appl. Surf. Sci. 1999, 140, 344–351. [Google Scholar] [CrossRef]
- Giessibl, F.J. Forces and frequency shifts in atomic-resolution dynamic-force microscopy. Phys. Rev. B Condens. Matter 1997, 56, 16010–16015. [Google Scholar] [CrossRef] [Green Version]
- Giessibl, F.J. A direct method to calculate tip–sample forces from frequency shifts in frequency modulation atomic force microscopy. Appl. Phys. Lett. 2001, 78, 123–125. [Google Scholar] [CrossRef]
- Simon, G.H.; Heyde, M.; Rust, H.P. Recipes for cantilever parameter determination in dynamic force spectroscopy: Spring constant and amplitude. Nanotechnology 2007, 18, 255503. [Google Scholar] [CrossRef]
- González, L.; Oria, R.; Botaya, L.; Puig-Vidal, M.; Otero, J. Determination of the static spring constant of electrically-driven quartz tuning forks with two freely oscillating prongs. Nanotechnology 2015, 26, 055501. [Google Scholar] [CrossRef]
- Castellanos-Gomez, A.; Agraït, N.; Rubio-Bollinger, G. Dynamics of quartz tuning fork force sensors used in scanning probe microscopy. Nanotechnology 2009, 20, 2155. [Google Scholar] [CrossRef]
- Falter, J.; Stiefermann, M.; Langewisch, G.; Schurig, P.; Höscher, H.; Fuchs, H.; Schirmeisen, A. Calibration of quartz tuning fork spring constants for non-contact atomic force microscopy: Direct mechanical measurements and simulations. Beilstein J. Nanotechnol. 2014, 5, 507–516. [Google Scholar] [CrossRef]
- Melcher, J.; Stirling, J.; Shaw, G.A. A simple method for the determination of qPlus sensor spring constants. Beilstein J. Nanotechnol. 2015, 6, 1733–1742. [Google Scholar] [CrossRef] [Green Version]
- Israelachvili, J.N. Intermolecular and Surface Forces, 2nd ed.; Academic Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Sarid, D. Scanning Force Microscopy: With Applications to Electric, Magnetic and Atomic Forces; Oxford University Press: Oxford, UK, 1991. [Google Scholar]
- Rützel, S.; Lee, S.I.; Raman, A. Nonlinear dynamics of atomic-force-microscope probes driven in Lennard-Jones potential. Proc. R. Soc. Lond。 A 2003, 459, 1925–1948. [Google Scholar] [CrossRef]
- Huang, B.S.; Chang-Chien, W.T.; Hsieh, F.H.; Chou, Y.F.; Chang, C.O. Analysis of the natural frequency of a quartz double-end tuning fork with a new deformation model. J. Micromech. Microeng. 2016, 26, 065006. [Google Scholar] [CrossRef]
- Ikeda, T. Fundamentals of Piezoelectricity; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Hough, D.B.; White, L.R. The Calculation of Hamaker Constant from Lifshitz Theory with Application to Wetting Phenomena. Adv. Colloid Interface Sci. 1980, 14, 3–41. [Google Scholar] [CrossRef]
- Eringen, A.C. Mechanics of Continua; Wiley: New York, NY, USA, 1967. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (kHz) | Frequency Shift (Hz) | Frequency Shift Ratio (ppm) | |
|---|---|---|---|
| 1 | 451.219 | 21 | 46.5 |
| 2 | 451.24 | 42 | 93.1 |
| 3 | 451.262 | 64 | 141.8 |
| 4 | 451.284 | 86 | 190.6 |
| 5 | 451.307 | 109 | 241.5 |
| 6 | 451.33 | 132 | 292.5 |
| 7 | 451.353 | 155 | 343.4 |
| 8 | 451.377 | 179 | 396.6 |
| 9 | 451.402 | 204 | 451.9 |
| 10 | 451.426 | 228 | 505.1 |
| 11 | 451.452 | 254 | 562.6 |
| 12 | 451.477 | 279 | 618.0 |
| 13 | 451.504 | 306 | 677.7 |
| 14 | 451.53 | 332 | 735.3 |
| 15 | 451.558 | 360 | 797.2 |
| 16 | 451.586 | 388 | 859.2 |
| 17 | 451.614 | 416 | 921.1 |
| 18 | 451.643 | 445 | 985.3 |
| 19 | 451.673 | 475 | 1051.6 |
| 20 | 451.703 | 505 | 1118.0 |
| 21 | 451.734 | 536 | 1186.5 |
| 22 | 451.765 | 567 | 1255.1 |
| 23 | 451.797 | 599 | 1325.8 |
| 24 | 451.83 | 632 | 1398.8 |
| 25 | 451.864 | 666 | 1473.9 |
| 26 | 451.898 | 700 | 1549.0 |
| 27 | 451.934 | 736 | 1628.6 |
| 28 | 451.969 | 771 | 1705.9 |
| 29 | 452.006 | 808 | 1787.6 |
| 30 | 452.044 | 846 | 1871.5 |
| Experiment | Analysis | FEM | |
|---|---|---|---|
| Frequency (kHz) | 32.768 (kHz) | 33.367 (kHz) | 31.466 (kHz) |
| Error (%) | - | 1.83% | −3.97% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, C.-O.; Chang-Chien, W.-T.; Song, J.-P.; Zhou, C.; Huang, B.-S. Analysis of the Frequency Shift versus Force Gradient of a Dynamic AFM Quartz Tuning Fork Subject to Lennard-Jones Potential Force. Sensors 2019, 19, 1948. https://doi.org/10.3390/s19081948
Chang C-O, Chang-Chien W-T, Song J-P, Zhou C, Huang B-S. Analysis of the Frequency Shift versus Force Gradient of a Dynamic AFM Quartz Tuning Fork Subject to Lennard-Jones Potential Force. Sensors. 2019; 19(8):1948. https://doi.org/10.3390/s19081948
Chicago/Turabian StyleChang, Chia-Ou, Wen-Tien Chang-Chien, Jia-Po Song, Chuang Zhou, and Bo-Shiun Huang. 2019. "Analysis of the Frequency Shift versus Force Gradient of a Dynamic AFM Quartz Tuning Fork Subject to Lennard-Jones Potential Force" Sensors 19, no. 8: 1948. https://doi.org/10.3390/s19081948