A SIFT-Based DEM Extraction Approach Using GEOEYE-1 Satellite Stereo Pairs



Abstract
:1. Introduction
2. Methodology
2.1. Ground to Image
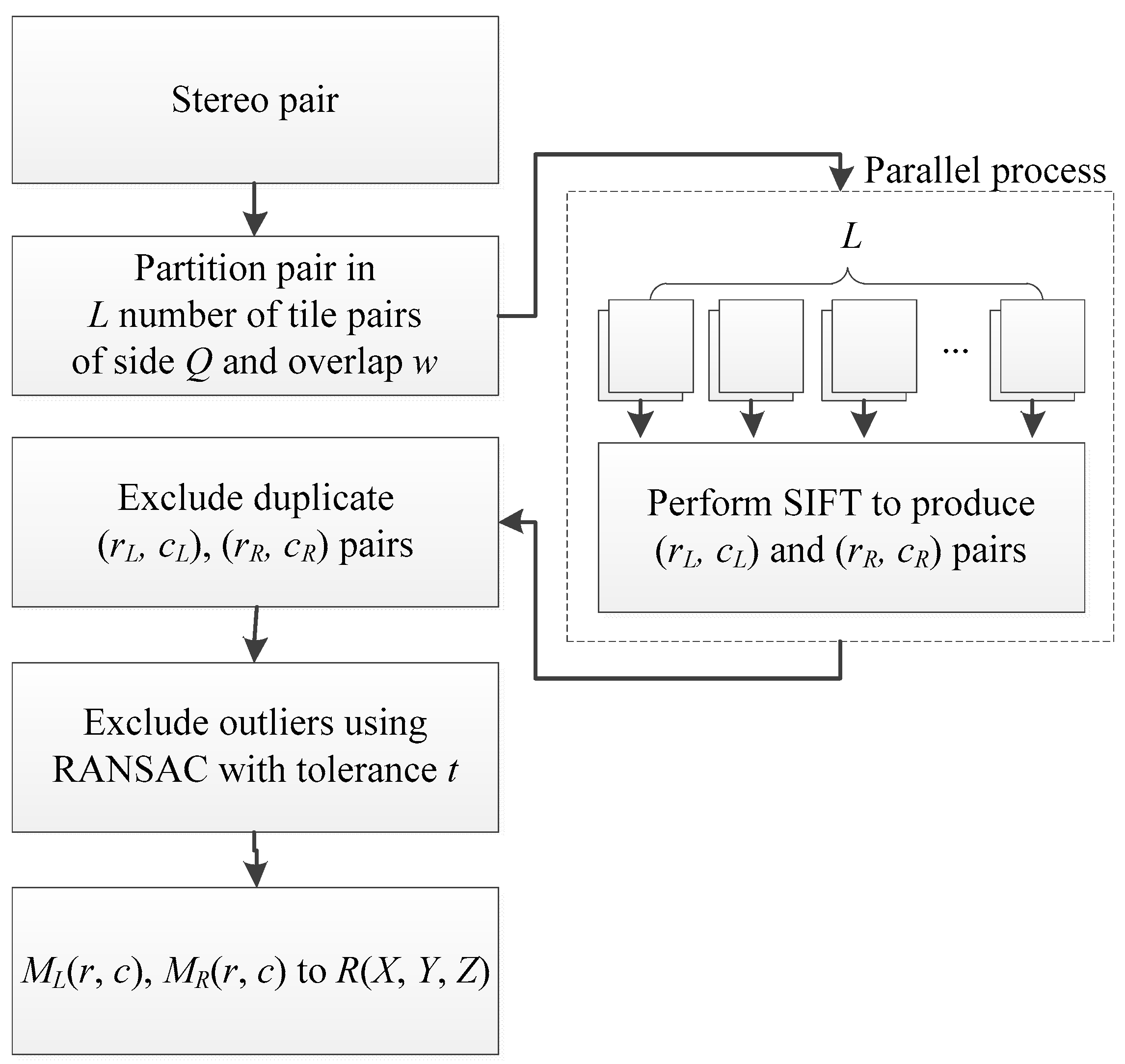
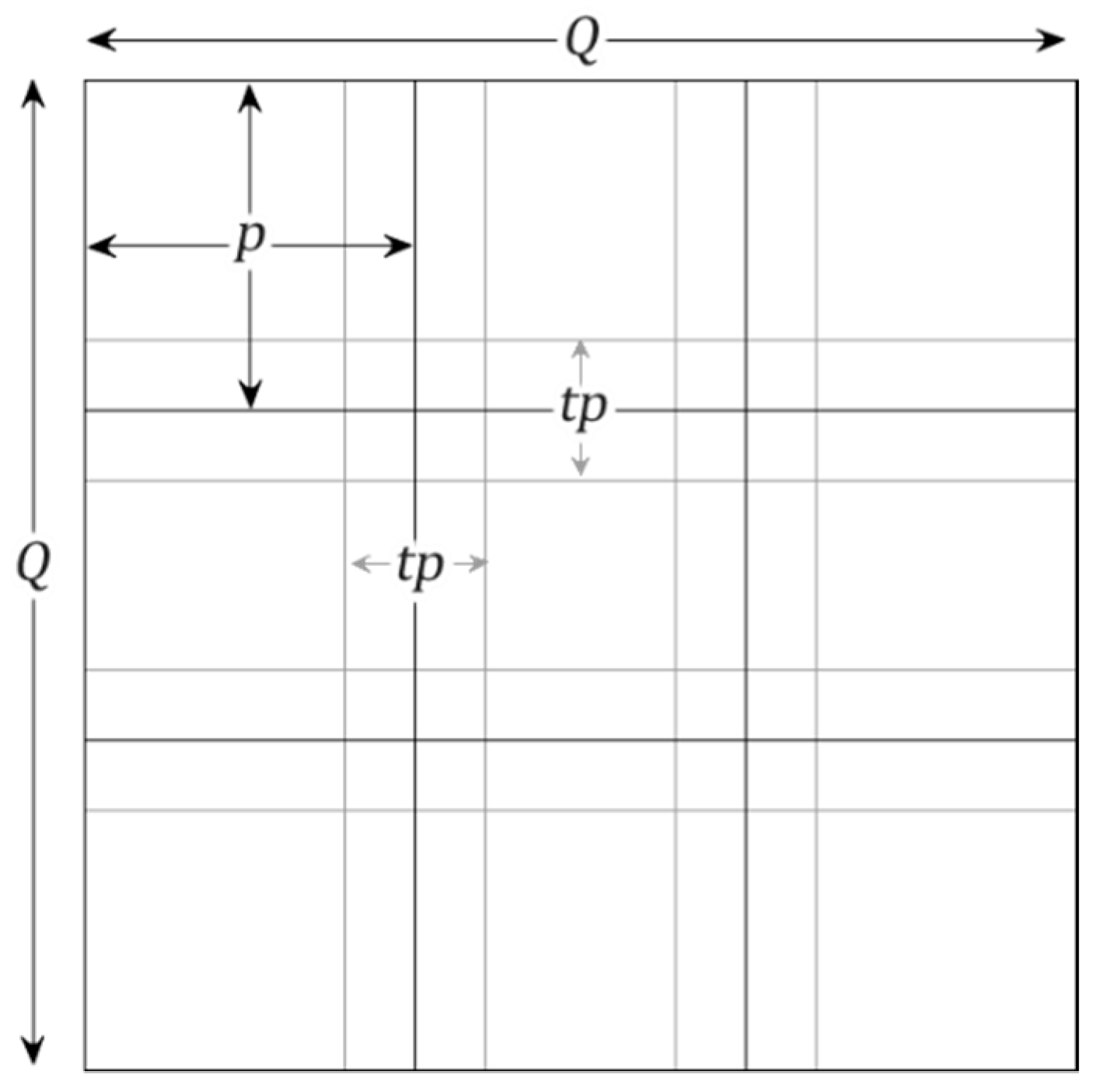
2.2. Cascading
2.3. SIFT Feature Point Detection and Matching
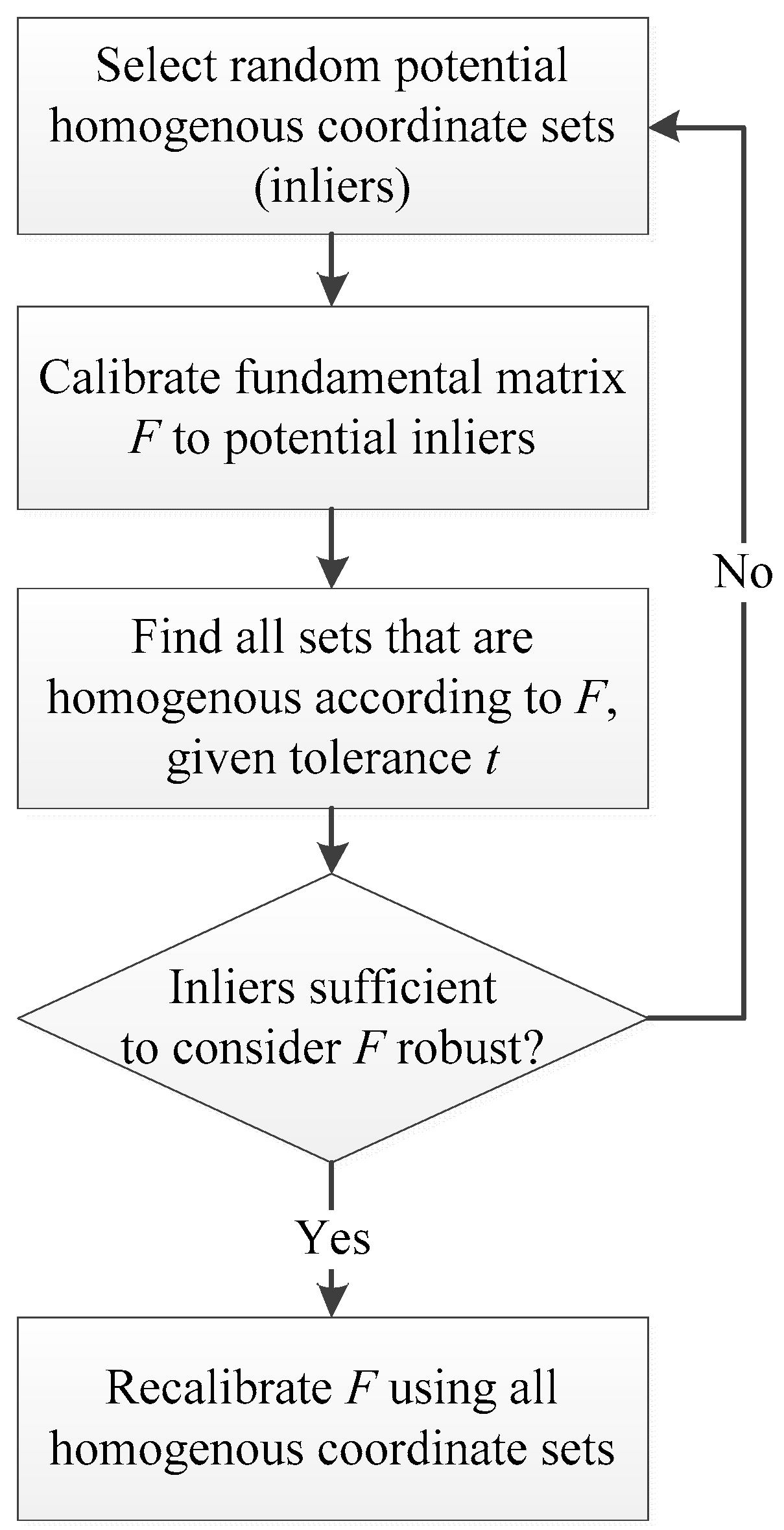
2.4. Outlier Detection
2.5. Image to Ground
2.6. Evaluation Criteria
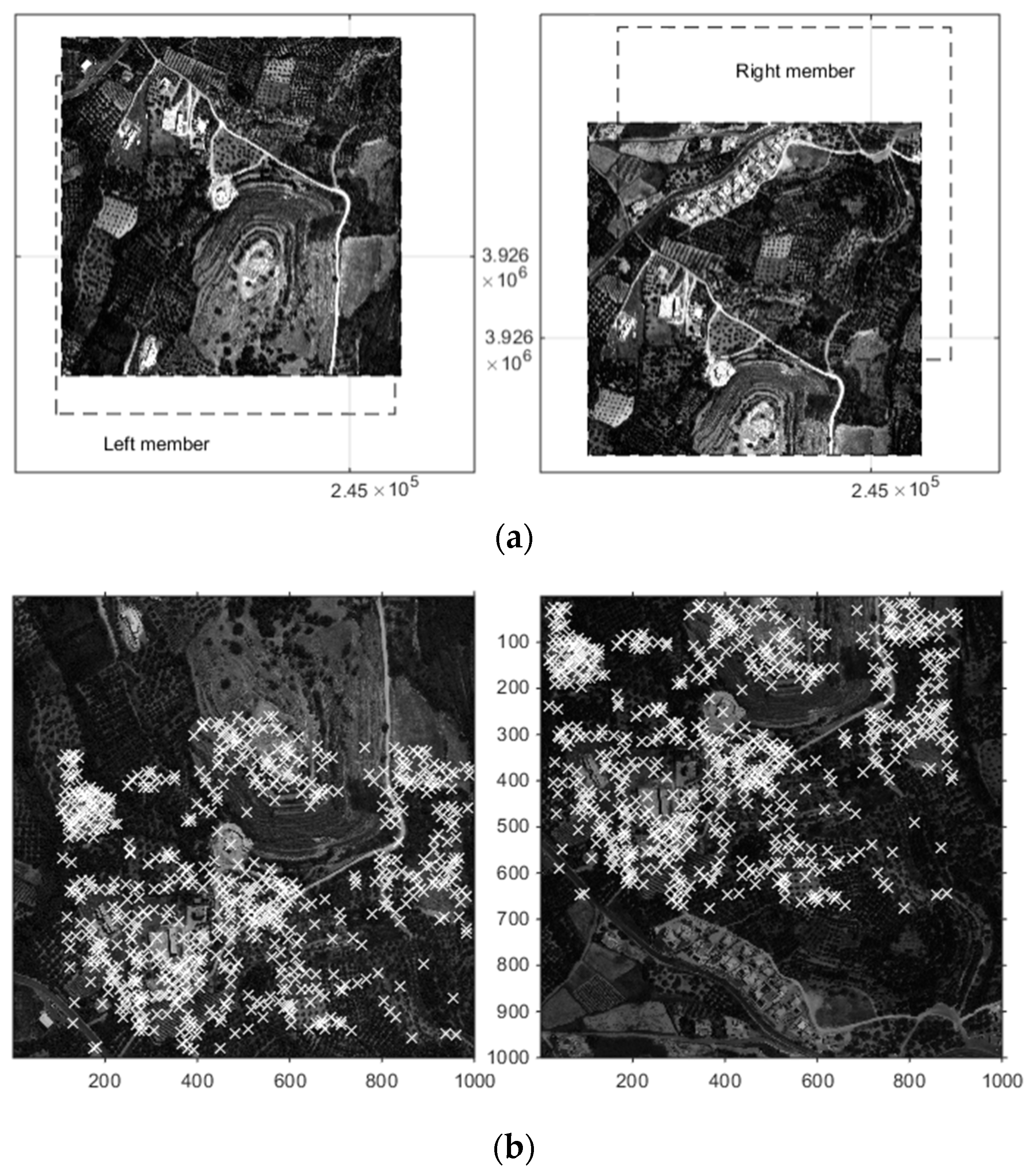
3. Case Study
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wilson, J.P. Digital terrain modeling. Geomorphology 2012, 137, 107–121. [Google Scholar] [CrossRef]
- Wilson, J.P.; Gallant, J.C. Terrain Analysis: Principles and Applications; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2000. [Google Scholar]
- Bagheri Bodaghabadi, M.; Salehi, M.H.; Martínez-Casasnovas, J.A.; Mohammadi, J.; Toomanian, N.; Esfandiarpoor Borujeni, I. Using Canonical Correspondence Analysis (CCA) to identify the most important DEM attributes for digital soil mapping applications. Catena 2011, 86, 66–74. [Google Scholar] [CrossRef]
- Vrochidou, A.E.K.; Tsanis, I.K. Assessing precipitation distribution impacts on droughts on the island of Crete. Nat. Hazards Earth Syst. Sci. 2012, 12, 1159–1171. [Google Scholar] [CrossRef]
- Pedrazzini, A.; Froese, C.R.; Jaboyedoff, M.; Hungr, O.; Humair, F. Combining digital elevation model analysis and run-out modeling to characterize hazard posed by a potentially unstable rock slope at Turtle Mountain, Alberta, Canada. Eng. Geol. 2011, 128, 76–94. [Google Scholar] [CrossRef]
- Duda, K.A.; Abrams, M. ASTER Satellite Observations for International Disaster Management. Proc. IEEE 2012, 100, 2798–2811. [Google Scholar] [CrossRef]
- Mongus, D.; Žalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Kamaratakis, E.K.; Chrysoulakis, N. SRTM vs. ASTER elevation products. Comparison for two regions in Crete, Greece. Int. J. Remote Sens. 2006, 27, 4819–4838. [Google Scholar] [CrossRef]
- E-GEOS GeoEye-1 Product Sheet. Available online: http://www.e-geos.it/products/geoeye.html (accessed on 2 June 2015).
- Deilami, K.; Hashim, M. Very high resolution optical satellites for DEM generation: A review. Eur. J. Sci. Res. 2011, 49, 542–554. [Google Scholar]
- Reinartz, P.; d’Angelo, P.; Kraus, T.; Poli, D.; Jacobsen, K.; Buyuksalih, G. Benchmarking and Quality Analysis of DEM Generated from High and Very High Resolution Optical Stereo Satellite Data; Copernicus GmbH: Göttingen, Germany, 2010; Volume 3. [Google Scholar]
- Aguilar, M.Á.; del Mar Saldaña, M.; Aguilar, F.J. Generation and quality assessment of stereo-extracted DSM from GeoEye-1 and WorldView-2 imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1259–1271. [Google Scholar] [CrossRef]
- Aguilar, M.A.; del Mar Saldana, M.; Aguilar, F.J. Assessing geometric accuracy of the orthorectification process from GeoEye-1 and WorldView-2 panchromatic images. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 427–435. [Google Scholar] [CrossRef]
- Agugiaro, G.; Poli, D.; Remondino, F. Testfield Trento: Geometric evaluation of very high resolution satellite imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, B8. [Google Scholar] [CrossRef]
- Rheault, M.; Bouroubi, Y.; Sarago, V.; Nguyen-Xuan, P.; Bugnet, P.; Gosselin, C.; Benoit, M. Integrated SAR Technologies for Monitoring the Stability of Mine Sites: Application Using Terrasar-X and Radarsat-2 Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 1057. [Google Scholar] [CrossRef]
- Tsanis, I.K.; Seiradakis, K.D.; Daliakopoulos, I.N.; Grillakis, M.G.; Koutroulis, A.G. Assessment of GeoEye-1 stereo-pair-generated DEM in flood mapping of an ungauged basin. J. Hydroinform. 2014, 16, 1. [Google Scholar] [CrossRef]
- Shruthi, R.B.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2014, 128, 262–277. [Google Scholar] [CrossRef]
- d’Angelo, P.; Eineder, M.; Minet, C.; Rossi, C.; Flory, M.; Niemeyer, I. High Resolution 3D Earth Observation Data Analysis for Safeguards Activities. In Proceedings of the IAEA Symposium on International Safeguards: Linking Strategy, Implementation and People, Vienna, Austria, 20–24 October 2014. [Google Scholar]
- Grabner, M.; Grabner, H.; Bischof, H. Fast approximated SIFT. In Proceedings of the Computer Vision–ACCV 2006, Hyderabad, India, 13–16 January 2006; pp. 918–927. [Google Scholar]
- Idrissa, M.; Lacroix, V. A multiresolution-MRF approach for stereo dense disparity estimation. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–6. [Google Scholar]
- Lefevre, S.; Dixon, C.; Jeusse, C.; Vincent, N. A local approach for fast line detection. In Proceedings of the 2002 14th International Conference on Digital Signal Processing, Santorini, Greece, 1–3 July 2002; Volume 2, pp. 1109–1112. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust wide-baseline stereo from maximally stable extremal regions. Image Vis. Comput. 2004, 22, 761–767. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Vision-based mobile robot localization and mapping using scale-invariant features. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 2, pp. 2051–2058. [Google Scholar]
- Tuytelaars, T.; Van Gool, L. Content-Based Image Retrieval Based on Local Affinely Invariant Regions; Springer: Berlin/Heidelberg, Germany, 1999; pp. 493–500. [Google Scholar]
- Ke, Y.; Sukthankar, R.; Huston, L. An efficient parts-based near-duplicate and sub-image retrieval system. In Proceedings of the 12th Annual ACM International Conference on Multimedia, New York, NY, USA, 10–16 October 2004; pp. 869–876. [Google Scholar]
- Brown, M.; Lowe, D.G. Recognising Panoramas. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 14–17 October 2003; Volume 2, p. 5. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Corfu, Greece, 20–25 September 1999; Volume 2, pp. 1150–1157. [Google Scholar]
- Gauglitz, S.; Höllerer, T.; Turk, M. Evaluation of Interest Point Detectors and Feature Descriptors for Visual Tracking. Int. J. Comput. Vis. 2011, 94, 335–360. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. IEEE Comput. Sci. 2004, 2, 506. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Tola, E.; Lepetit, V.; Fua, P. A fast local descriptor for dense matching. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 24–26 June 2008; pp. 1–8. [Google Scholar]
- Juan, L.; Gwun, O. A comparison of sift, pca-sift and surf. Int. J. Image Process. 2009, 3, 143–152. [Google Scholar]
- Forlani, G.; Roncella, R.; Nardinocchi, C. Where is photogrammetry heading to? State of the art and trends. Rend. Lincei 2015, 26, 1–12. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-Like Algorithm for SAR Images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef]
- Elaksher, A.F.; Al-Jarrah, A.; Walker, K. Lunar Surface Reconstruction from Apollo MC Images. Earth. Moon. Planets 2015, 115, 1–12. [Google Scholar] [CrossRef]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-Based Modelling from Unmanned Aerial Vehicle (UAV) Photogrammetry: An Effective, Low-Cost Tool for Archaeological Applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Croitoru, A.; Hu, Y.; Tao, V.; Xu, Z.; Wang, F.; Lenson, P. Single and stereo based 3D metrology from high-resolution imagery: Methodologies and accuracies. Int. Arch. Photogramm. Remote Sens. 2004, 20, 1022–1027. [Google Scholar]
- Daliakopoulos, I.N.; Tsanis, I.K. Comparison of SIFT and SURF based DEM extraction approaches on a GEOEYE-1 satellite stereo-pair. In Proceedings of the EGU General Assembly, Vienna, Austria, 7 April–2 May 2014. [Google Scholar]
- Daliakopoulos, I.N.; Tsanis, I.K. GEOEYE-1 Satellite Stereo-Pair DEM Extraction Using Scale-Invariant Feature Transform on a Parallel Processing Platform. In Proceedings of the EGU General Assembly, Vienna, Austria, 7–12 April 2013. [Google Scholar]
- Tsanis, I.; Daliakopoulos, I.N. Assessment of a SIFT-based DEM extraction approach using GEOEYE-1 satellite stereo-pairs in flood mapping of an ungauged basin. In Proceedings of the Qatar Foundation Annual Research Conference, Doha, Qatar, 24–25 November 2013. [Google Scholar]
- Bang, K.I.; Jeong, S.; Kim, K.-O.; Cho, W. Automatic DEM generation using IKONOS stereo imagery. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 7, pp. 4289–4291. [Google Scholar]
- Hu, Y.; Tao, C.V. Updating solutions of the rational function model using additional control information. Photogramm. Eng. Remote Sens. 2002, 68, 715–724. [Google Scholar]
- Dolloff, J.T. RPC uncertainty parameters: Generation, application, and effects. In Proceedings of the ASPRS Annual Convention, Sacramento, CA, USA, 19–23 March 2012. [Google Scholar]
- OGC OpenGIS Simple Feature Specification for SQL Version 1.1; Open GIS Project Document 99-049; OpenGIS Consortium: Wayland, MA, USA, 1999.
- Abu-Sufah, W. Improving the Performance of Virtual Memory Computers. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 1979. [Google Scholar]
- Abu-Sufah, W.; Kuck, D.J.; Lawrie, D.H. On the performance enhancement of paging systems through program analysis and transformations. IEEE Trans. Comput. 1981, 100, 341–356. [Google Scholar] [CrossRef]
- Wolfe, M. More iteration space tiling. In Proceedings of the 1989 ACM/IEEE conference on Supercomputing, Reno, NV, USA, 12–17 November 1989; pp. 655–664. [Google Scholar]
- Wolfe, M. Iteration Space Tiling for Memory Hierarchies; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1989; pp. 357–361. [Google Scholar]
- Burt, P.; Adelson, E. The Laplacian pyramid as a compact image code. IEEE Trans. Commun. 1983, 31, 532–540. [Google Scholar] [CrossRef]
- Crowley, J.L.; Stern, R.M. Fast computation of the difference of low-pass transform. IEEE Trans. Pattern Anal. Mach. Intell. 1984, 212–222. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-space theory: A basic tool for analyzing structures at different scales. J. Appl. Stat. 1994, 21, 225–270. [Google Scholar] [CrossRef]
- Lindeberg, T. Feature detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 79–116. [Google Scholar] [CrossRef]
- Daliakopoulos, I.N.; Grillakis, E.G.; Koutroulis, A.G.; Tsanis, I.K. Tree crown detection on multispectral VHR satellite imagery. Photogramm. Eng. Remote Sens. 2009, 75, 1201–1212. [Google Scholar] [CrossRef]
- Daliakopoulos, I.N.; Tsanis, I.K. A weather radar data processing module for storm analysis. J. Hydroinform. 2012, 14, 332. [Google Scholar] [CrossRef]
- Hu, Y. Research on a three-dimensional reconstruction method based on the feature matching algorithm of a scale-invariant feature transform. Math. Comput. Model. 2011, 54, 919–923. [Google Scholar] [CrossRef]
- Hartley, R.I.; Gupta, R. Linear pushbroom cameras. In Proceedings of the Computer Vision—ECCV’94, Stockholm, Sweden, 2–6 May 1994; pp. 555–566. [Google Scholar]
- Hartley, R.I. Theory and practice of projective rectification. Int. J. Comput. Vis. 1999, 35, 115–127. [Google Scholar] [CrossRef]
- Luong, Q.-T.; Faugeras, O.D. The fundamental matrix: Theory, algorithms, and stability analysis. Int. J. Comput. Vis. 1996, 17, 43–75. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hartley, R.I.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge Univ Press: Cambridge, UK, 2003; Volume 2. [Google Scholar]
- Cheng, L.; Tong, L.; Liu, Y.; Li, M.; Wang, J. Automatic Registration of Coastal Remotely Sensed Imagery by Affine Invariant Feature Matching with Shoreline Constraint. Mar. Geod. 2014, 37, 32–46. [Google Scholar] [CrossRef]
- Tao, C.V.; Hu, Y. A comprehensive study of the rational function model for photogrammetric processing. PE RS-Photogramm. Eng. Remote Sens. 2001, 67, 1347–1357. [Google Scholar]
- Hu, Y.; Tao, V.; Croitoru, A. Understanding the rational function model: Methods and applications. Int. Arch. Photogramm. Remote Sens. 2004, 20, 6. [Google Scholar]
- Tao, C.V.; Hu, Y. 3D reconstruction methods based on the rational function model. Photogramm. Eng. Remote Sens. 2002, 68, 705–714. [Google Scholar]
- Lin, X.; Yuan, X. Improvement of the stability solving rational polynomial coefficients. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Beijing 2008, 37, 711–714. [Google Scholar]
- Scharstein, D.; Szeliski, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Evangelidis, G.; Hansard, M.; Horaud, R. Fusion of Range and Stereo Data for High-Resolution Scene-Modeling. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2178–2192. [Google Scholar] [CrossRef] [PubMed]
- Manduchi, R.; Tomasi, C. Distinctiveness maps for image matching. In Proceedings of the 10th International Conference on Image Analysis and Processing, Venice, Italy, 27–29 September 1999; pp. 26–31. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 5-m DEM | 2-m DEM | 1.5-m DEM | |
|---|---|---|---|
| Min value [m] | 19.02 | 26.72 | 22.56 |
| Max value [m] | 93.95 | 96.86 | 90.36 |
| Mean value [m] | 53.00 | 58.69 | 53.26 |
| St. dev. [m] | 19.04 | 17.85 | 17.70 |
| Min difference from 1.5 m DEM [m] | −14.05 | −14.50 | - |
| Max difference from 1.5 m DEM [m] | 9.03 | 4.89 | - |
| Mean difference from 1.5 DEM [m] | −1.57 | −5.42 | - |
| St. dev. of difference from 1.5 DEM [m] | 3.24 | 2.53 | |
| [m] from Total Station field measurements | −1.56 | 0.59 | −0.45 |
| St. dev. of[m] from Total Station | 1.18 | 1.02 | 1.00 |
| [%] from the Total Station | −2.65% | 0.83% | −0.86% |
| St. dev. of[%] from Total Station | 2.02% | 1.65% | 1.64% |
| RMSE from the Total Station | 1.96 | 1.18 | 1.10 |
| R2 from the Total Station | 0.9911 | 0.9948 | 0.9938 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Daliakopoulos, I.N.; Tsanis, I.K. A SIFT-Based DEM Extraction Approach Using GEOEYE-1 Satellite Stereo Pairs. Sensors 2019, 19, 1123. https://doi.org/10.3390/s19051123
Daliakopoulos IN, Tsanis IK. A SIFT-Based DEM Extraction Approach Using GEOEYE-1 Satellite Stereo Pairs. Sensors. 2019; 19(5):1123. https://doi.org/10.3390/s19051123
Chicago/Turabian StyleDaliakopoulos, Ioannis N., and Ioannis K. Tsanis. 2019. "A SIFT-Based DEM Extraction Approach Using GEOEYE-1 Satellite Stereo Pairs" Sensors 19, no. 5: 1123. https://doi.org/10.3390/s19051123