3D LiDAR-Based Precision Vehicle Localization with Movable Region Constraints

Abstract
:1. Introduction
2. Method
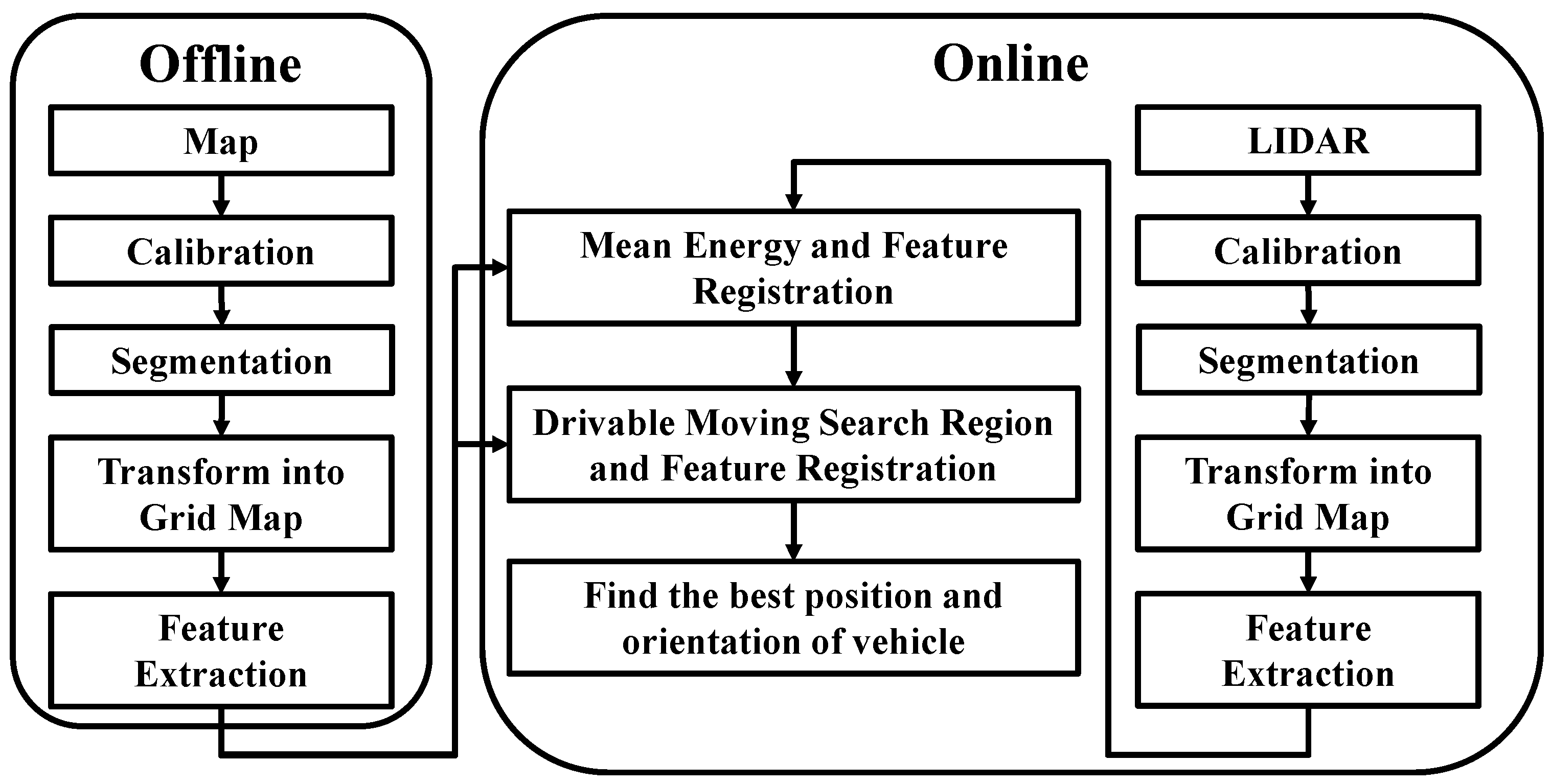
2.1. Procedural Structure of the Localization Algorithm
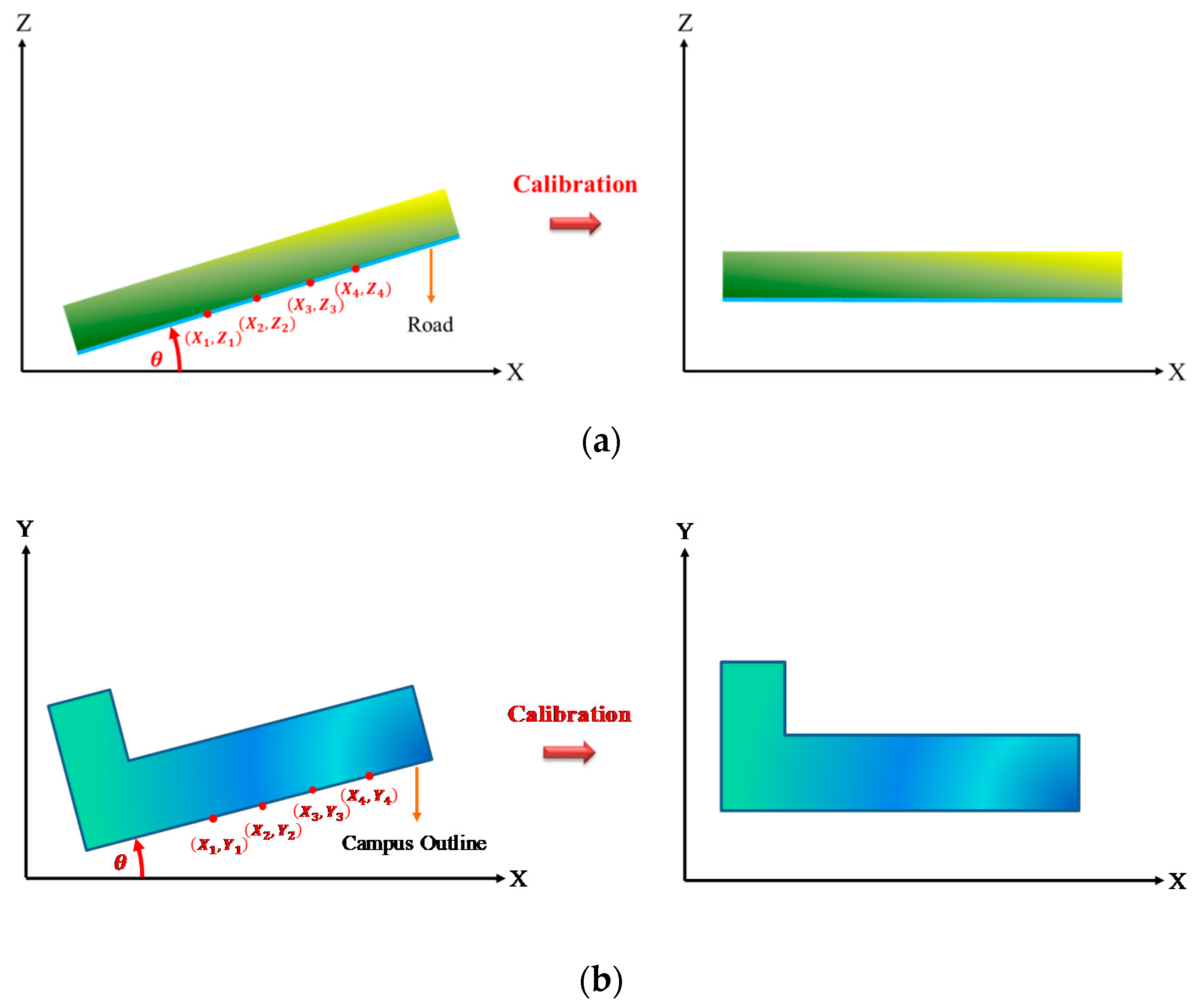
2.2. Calibration
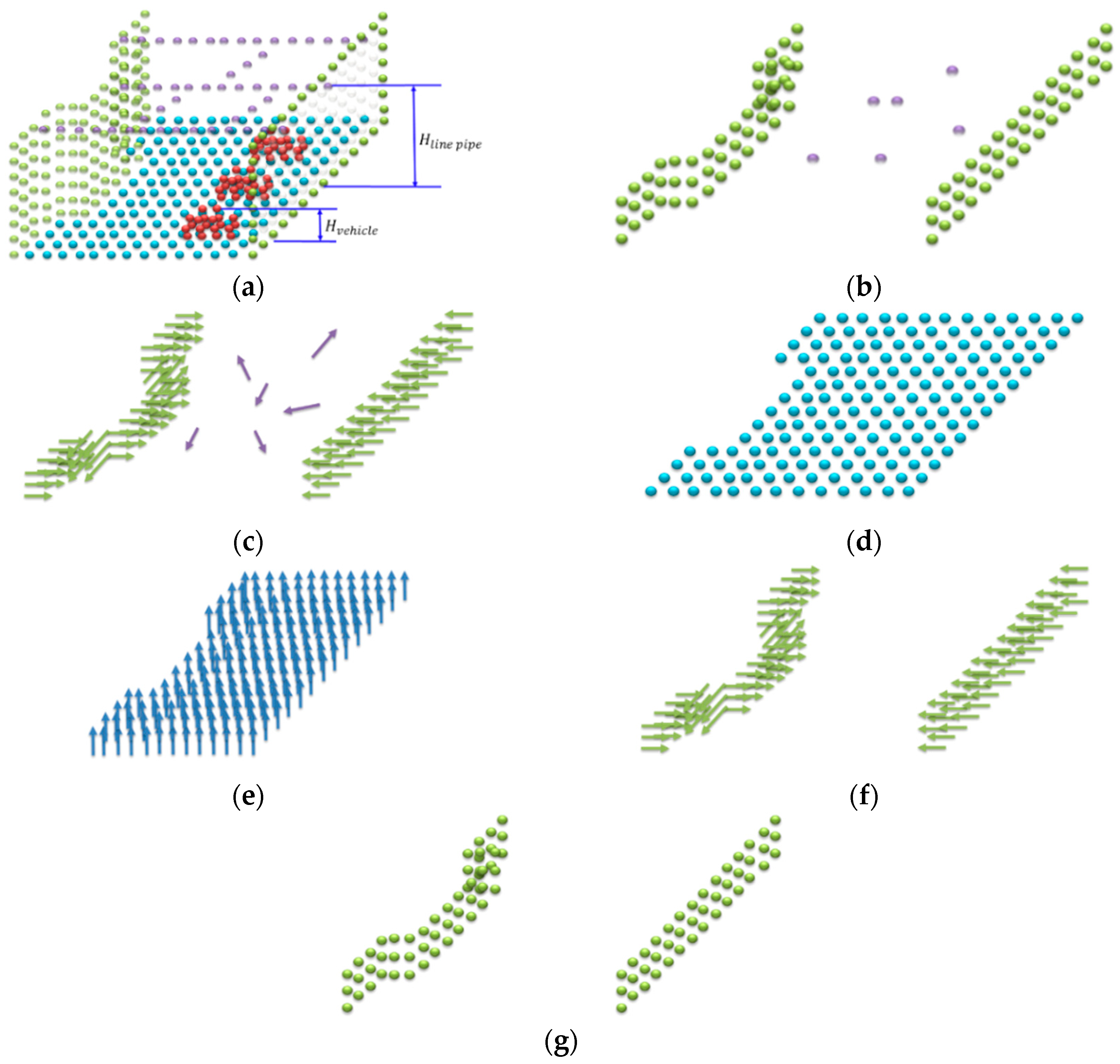
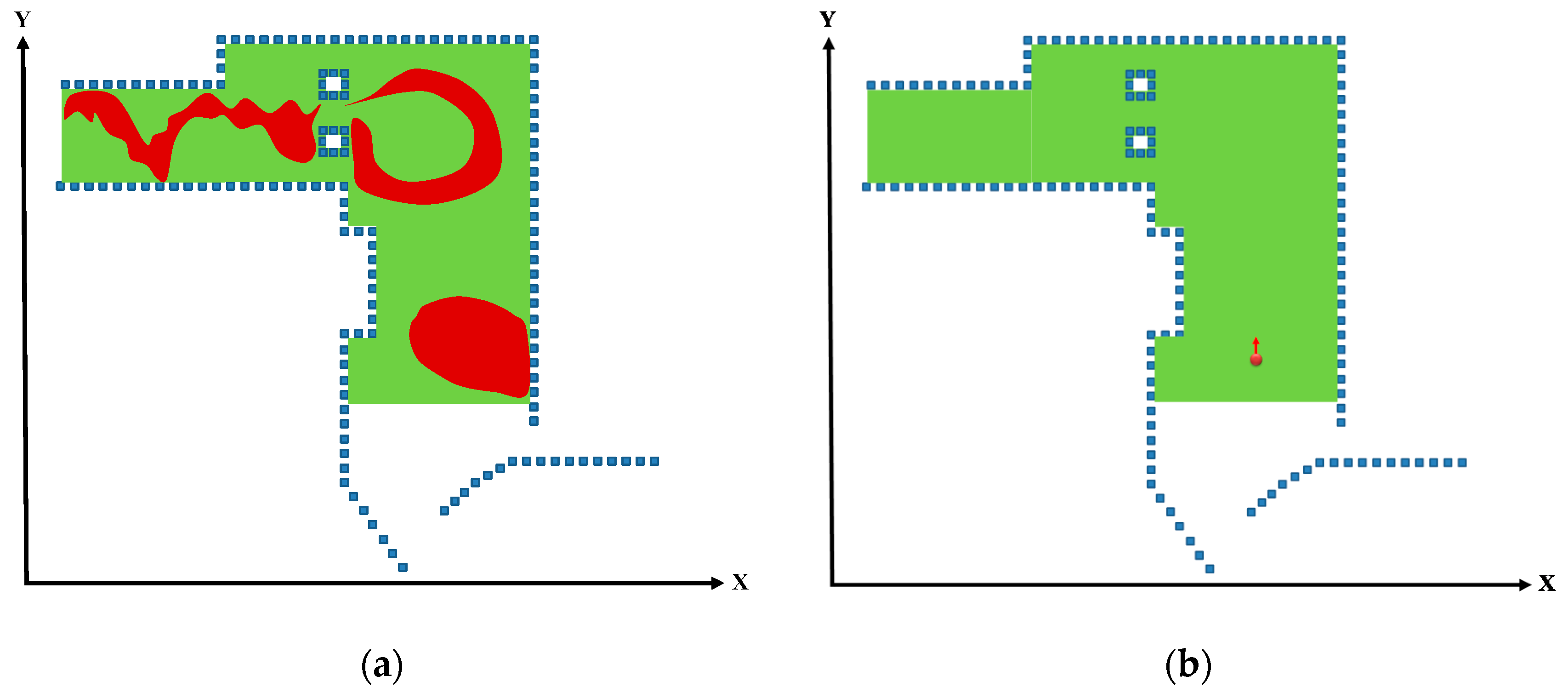
2.3. Segmentation
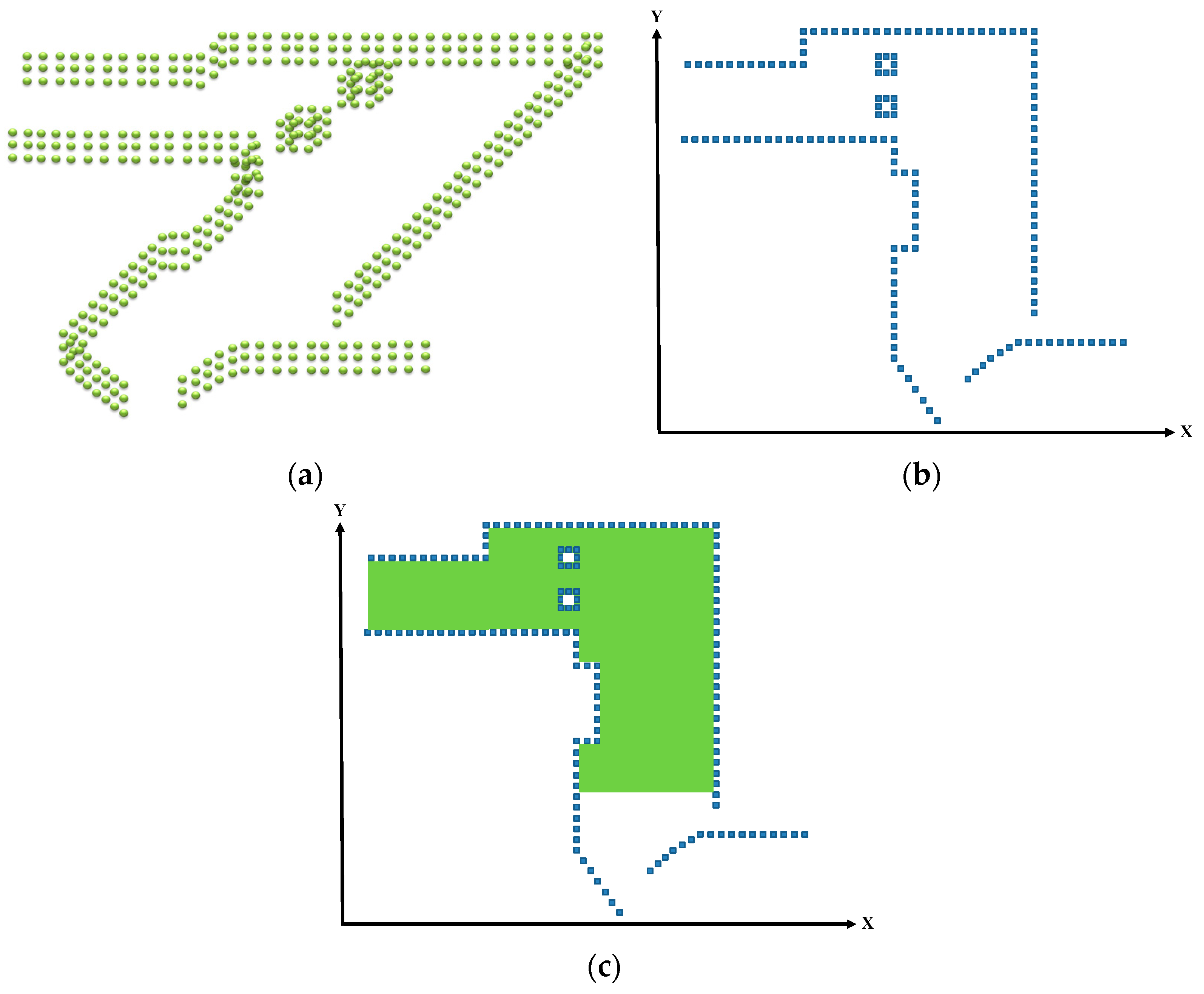
2.4. Transforming the Point Cloud into a Grid Map
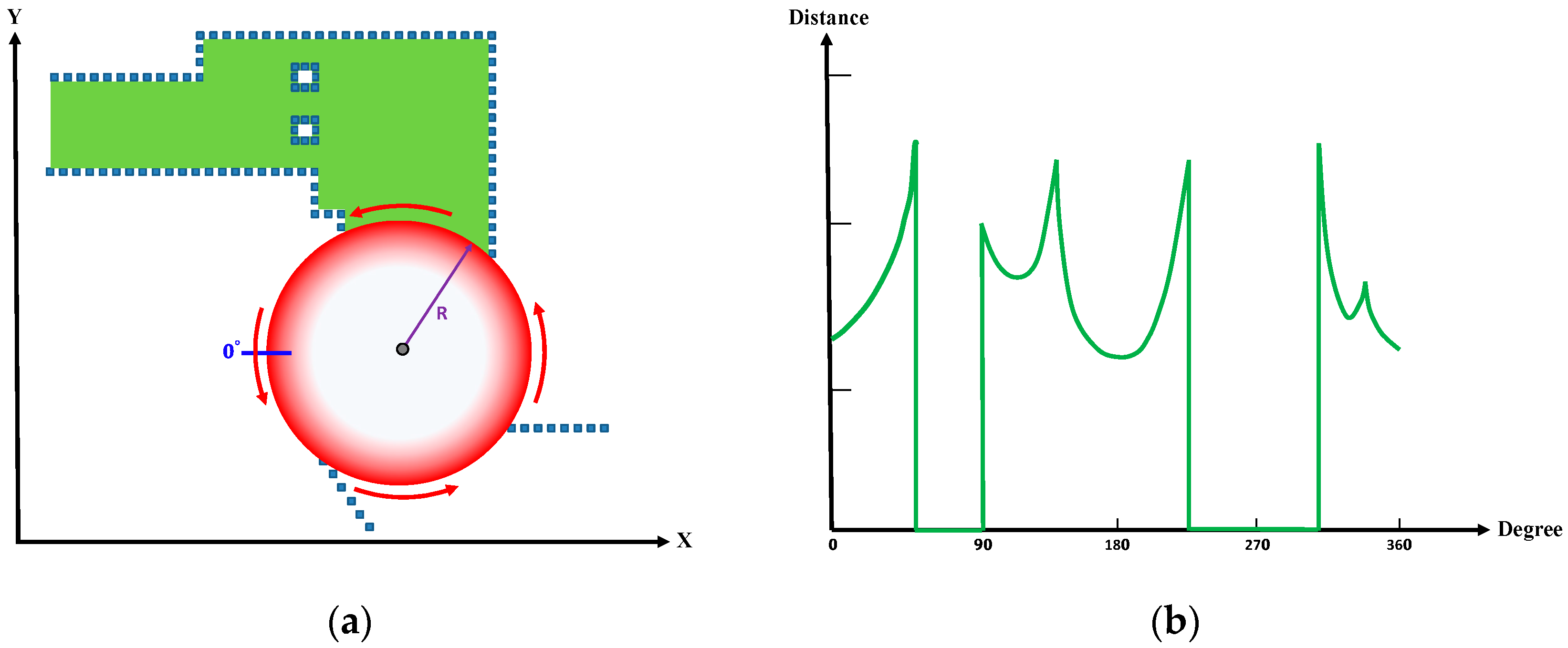
2.5. Feature Extraction
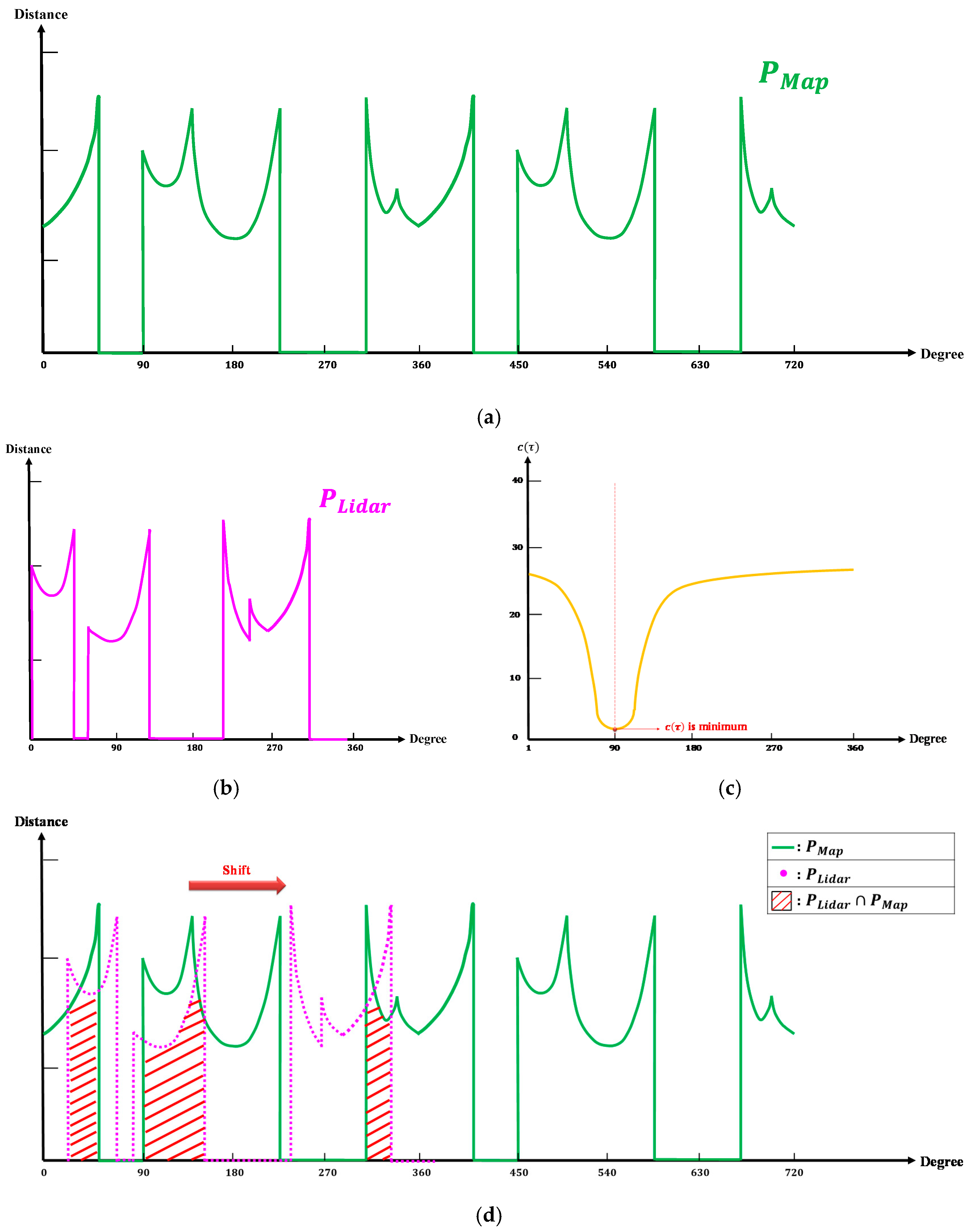
2.6. Feature Registration
2.7. Estimating the Initial Location
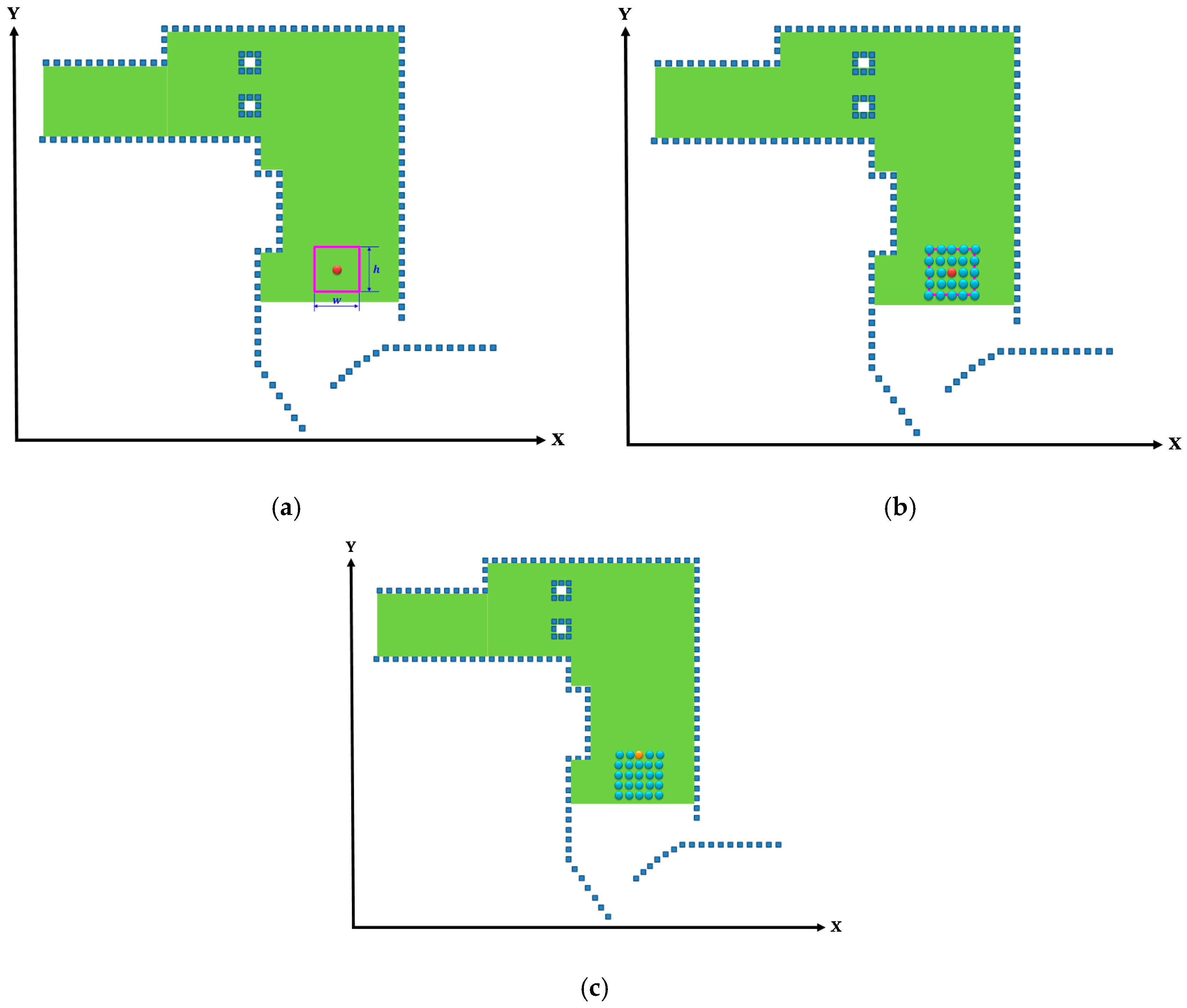
2.8. Window-Based Localization
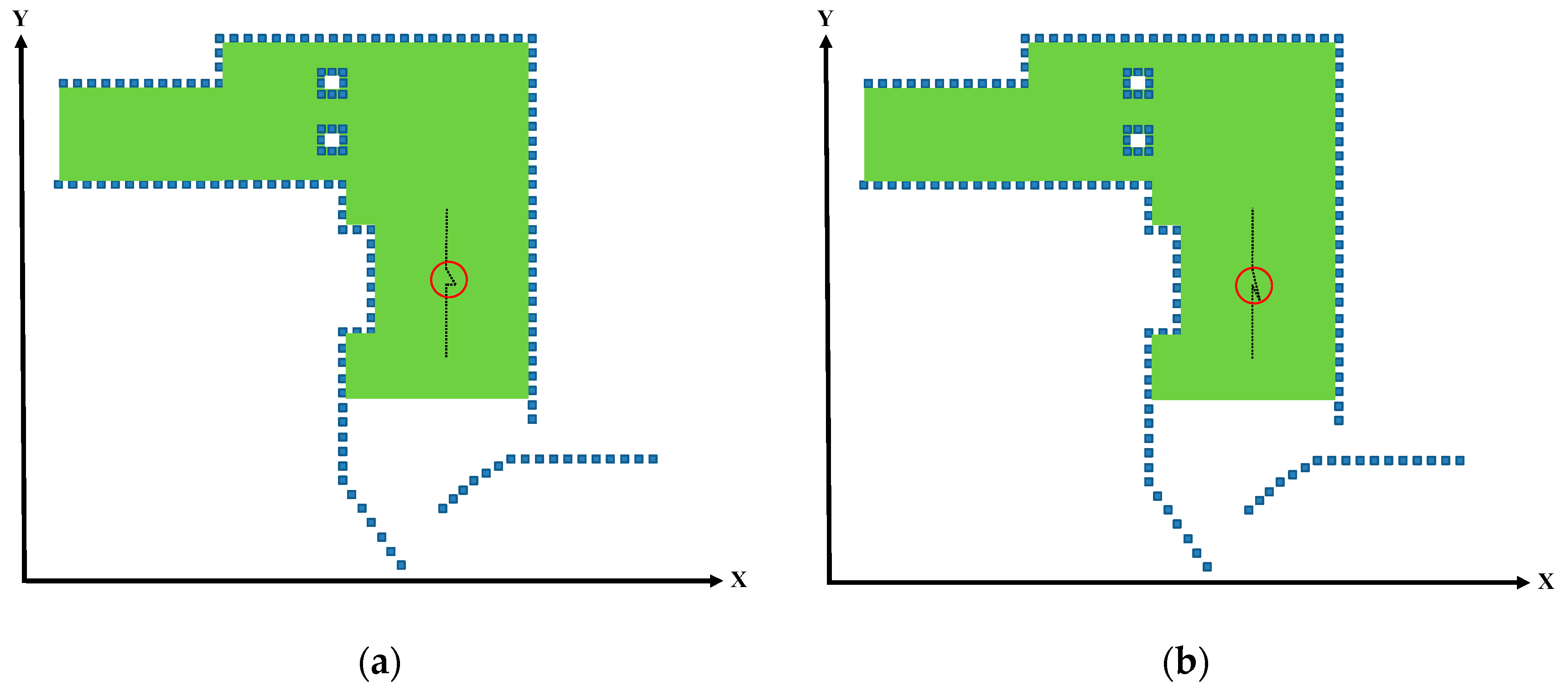
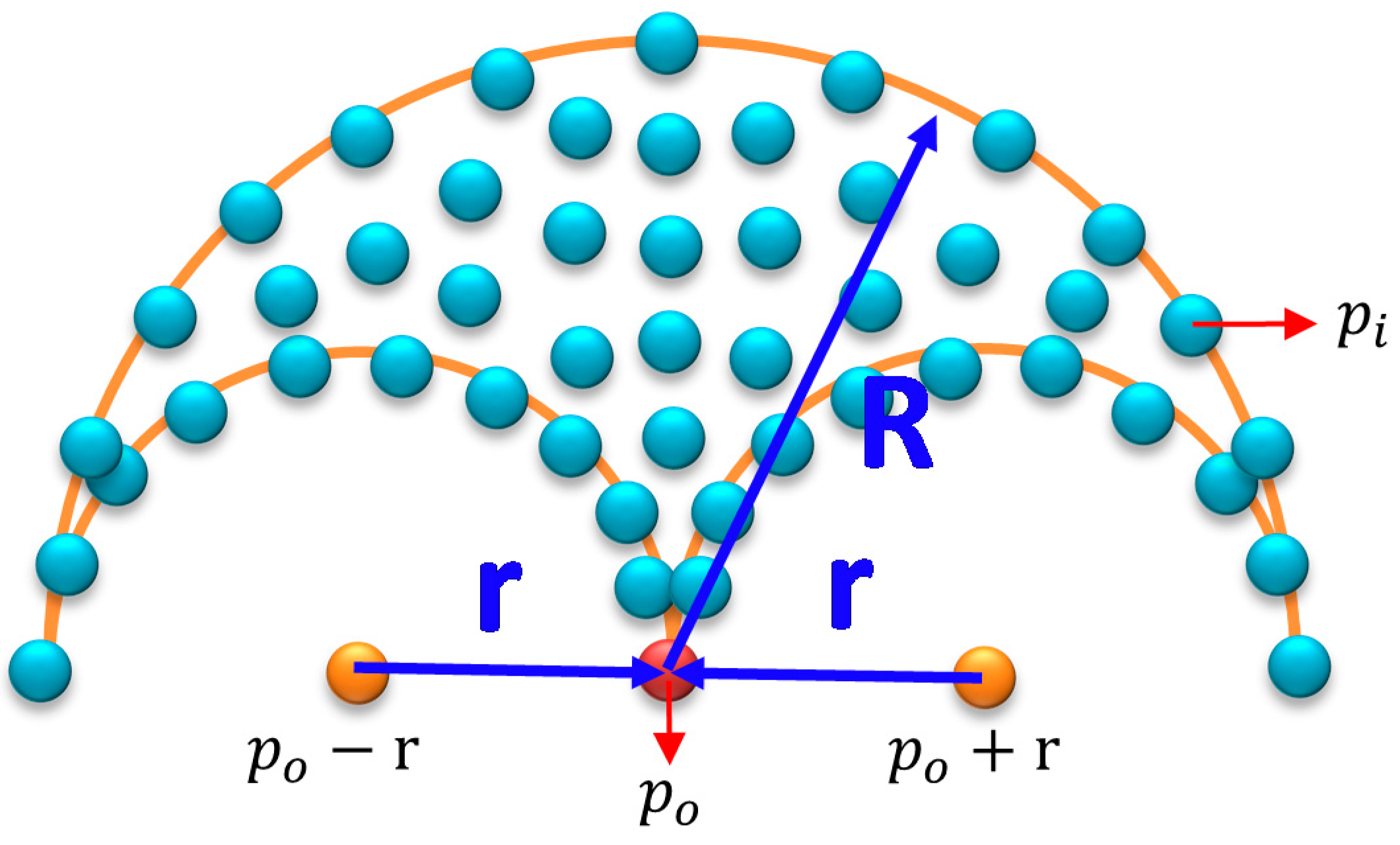
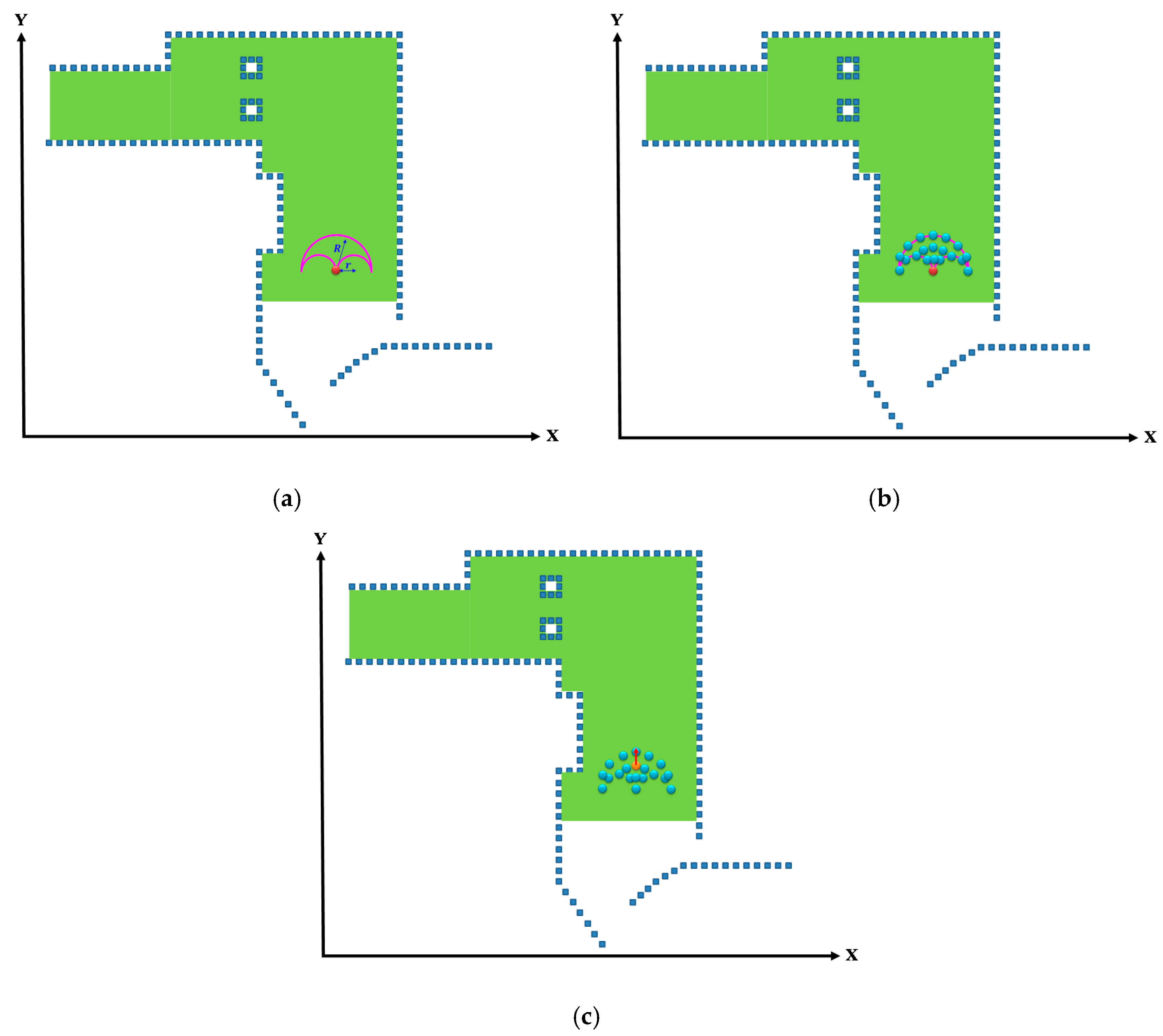
2.9. DMR-Based Localization
3. Experiment
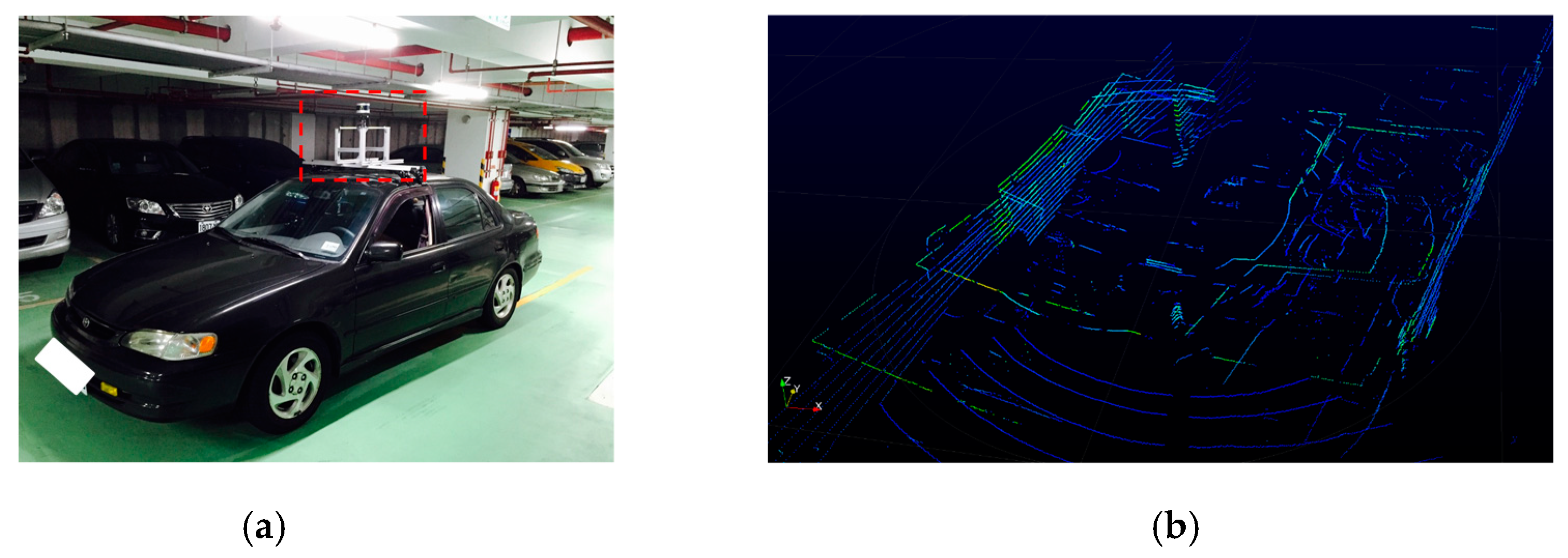
3.1. Equipment
3.2. Indoor Localization Experiment
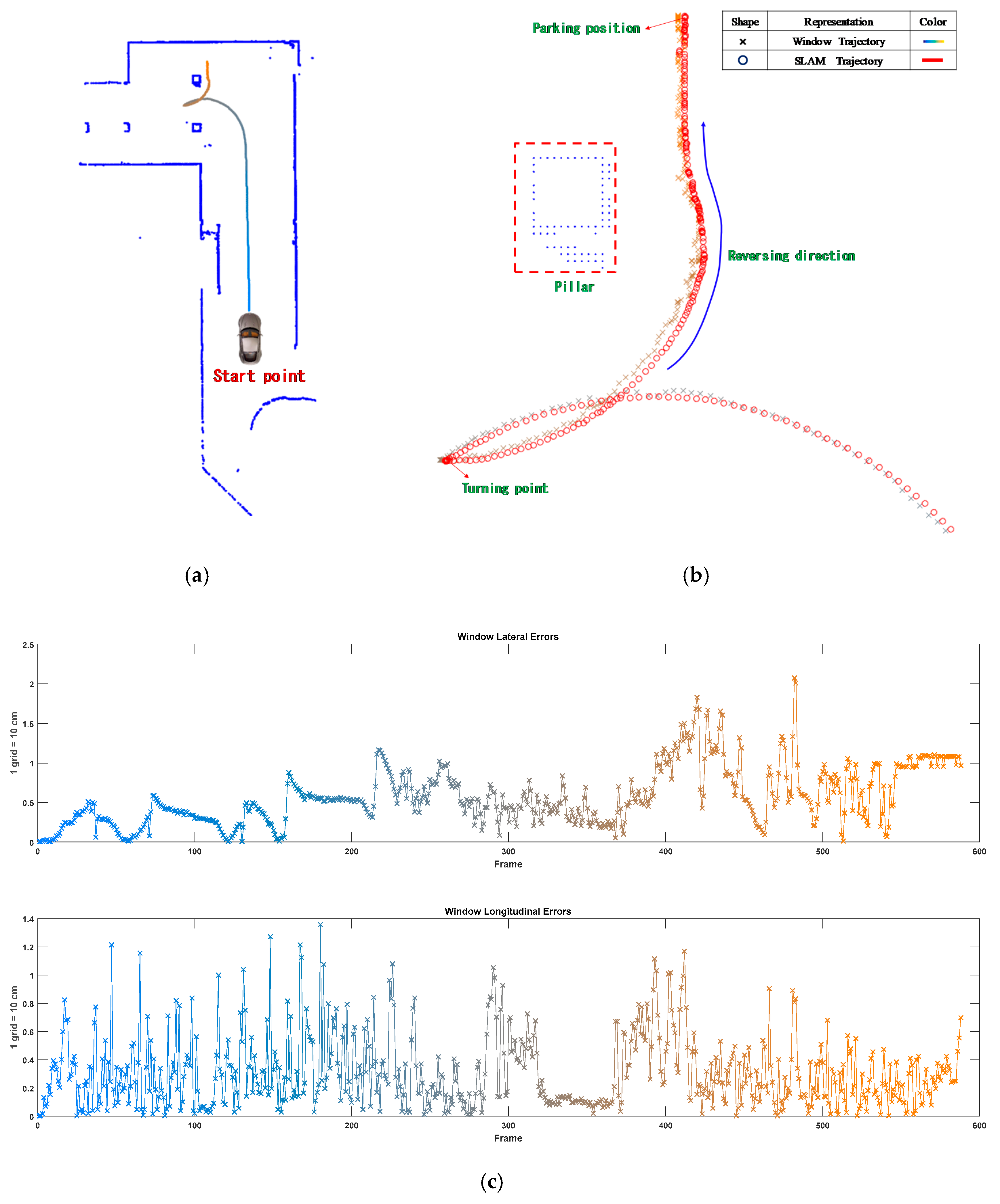
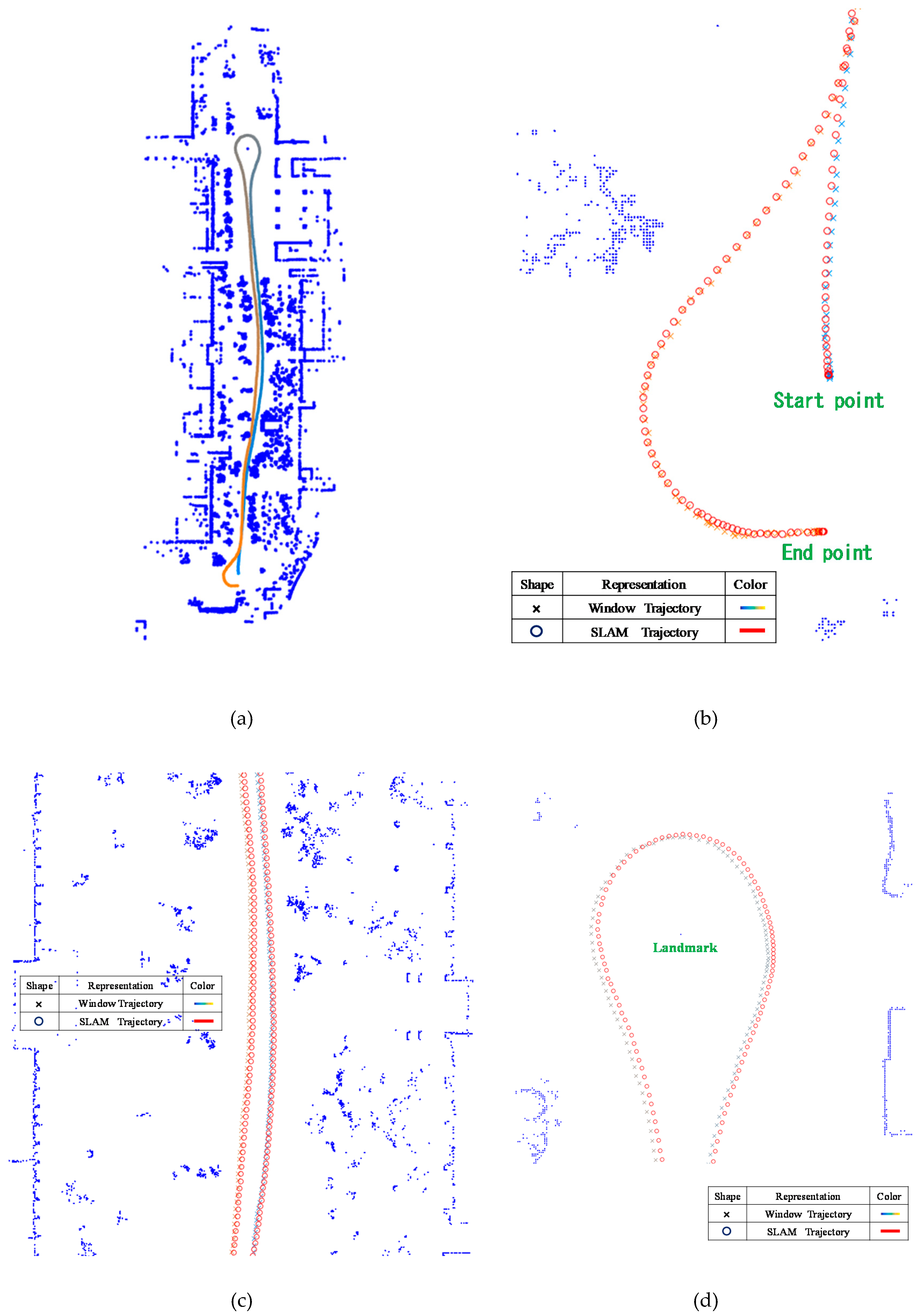
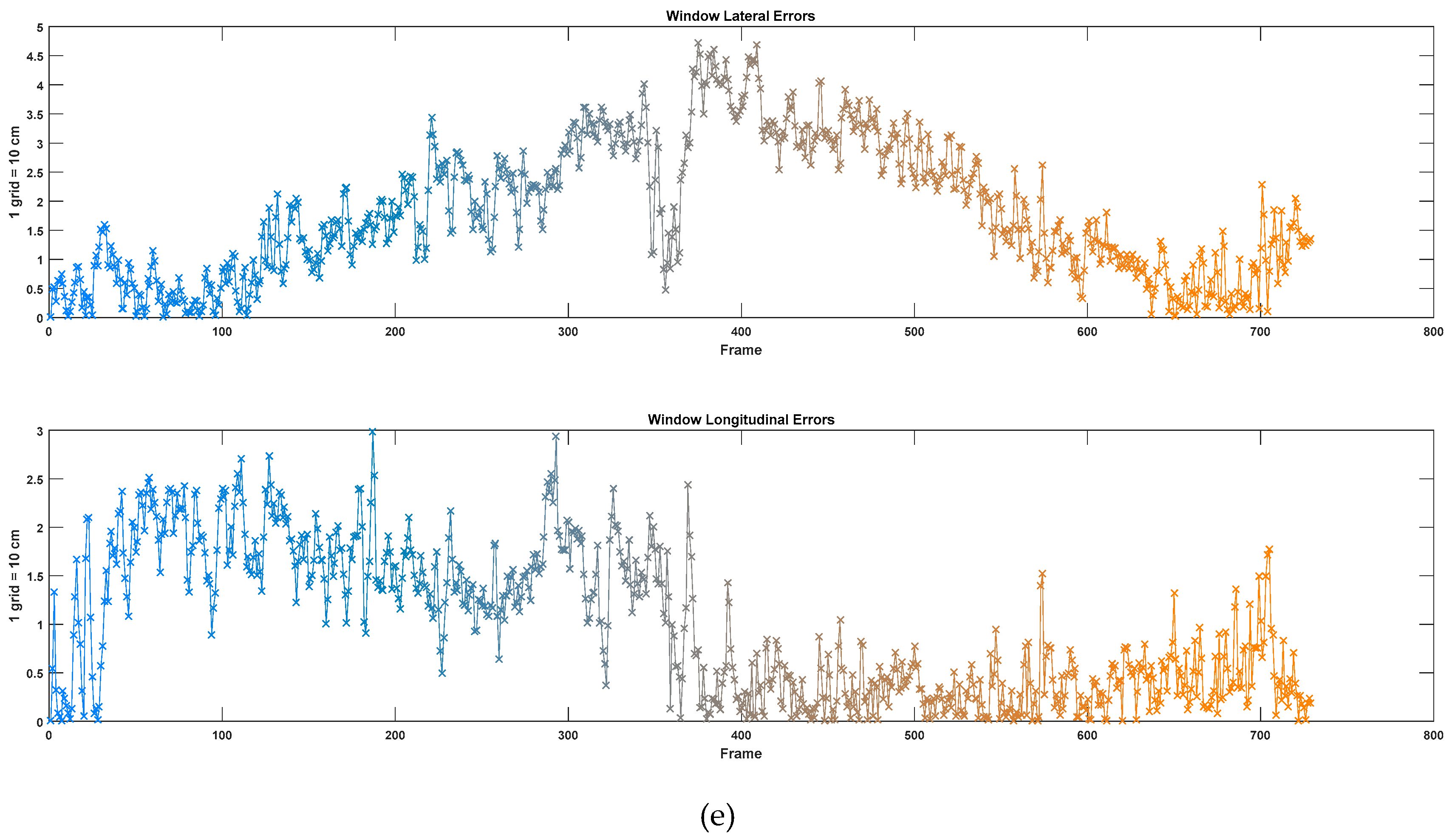
3.2.1. Window-Based Localization
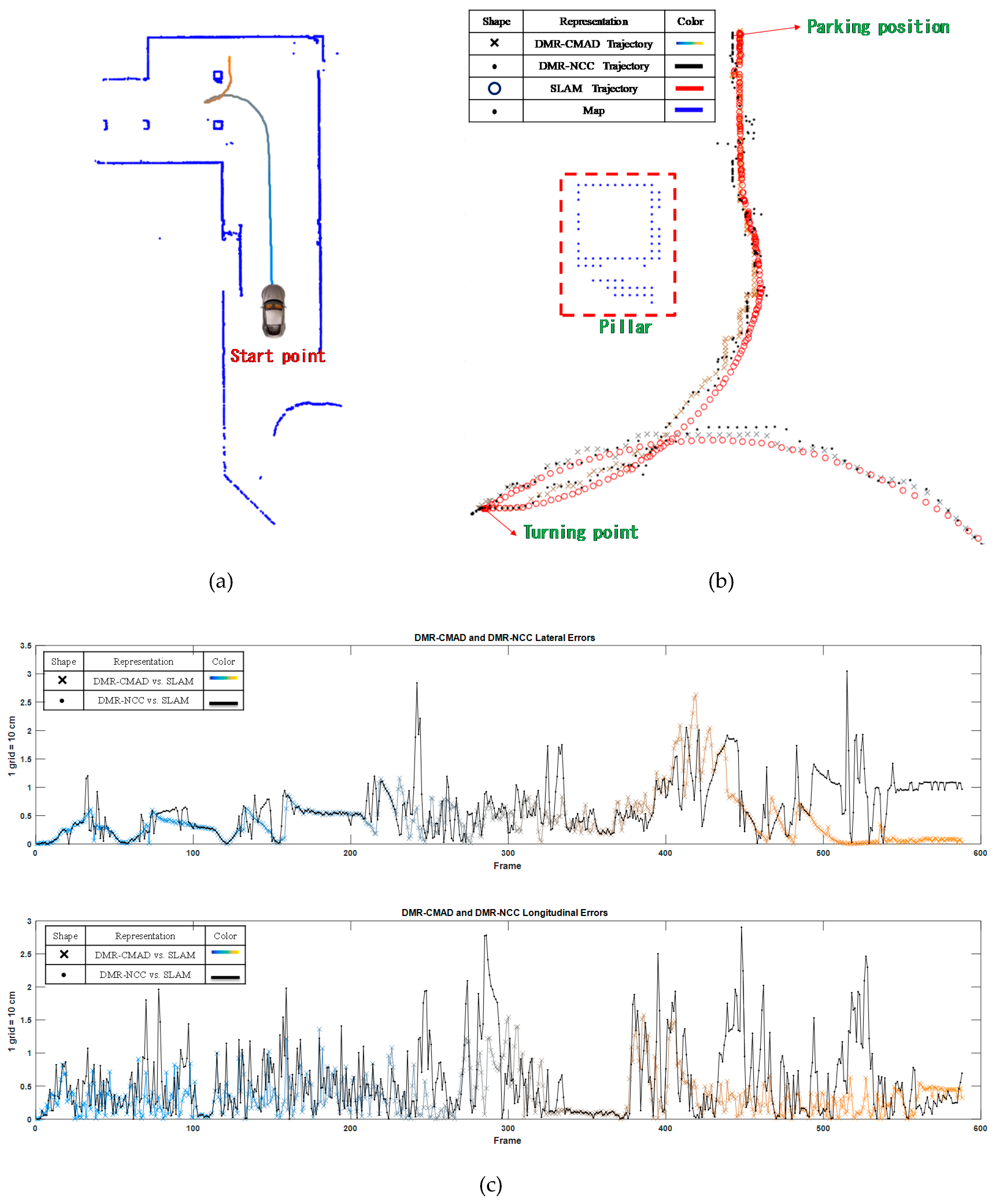
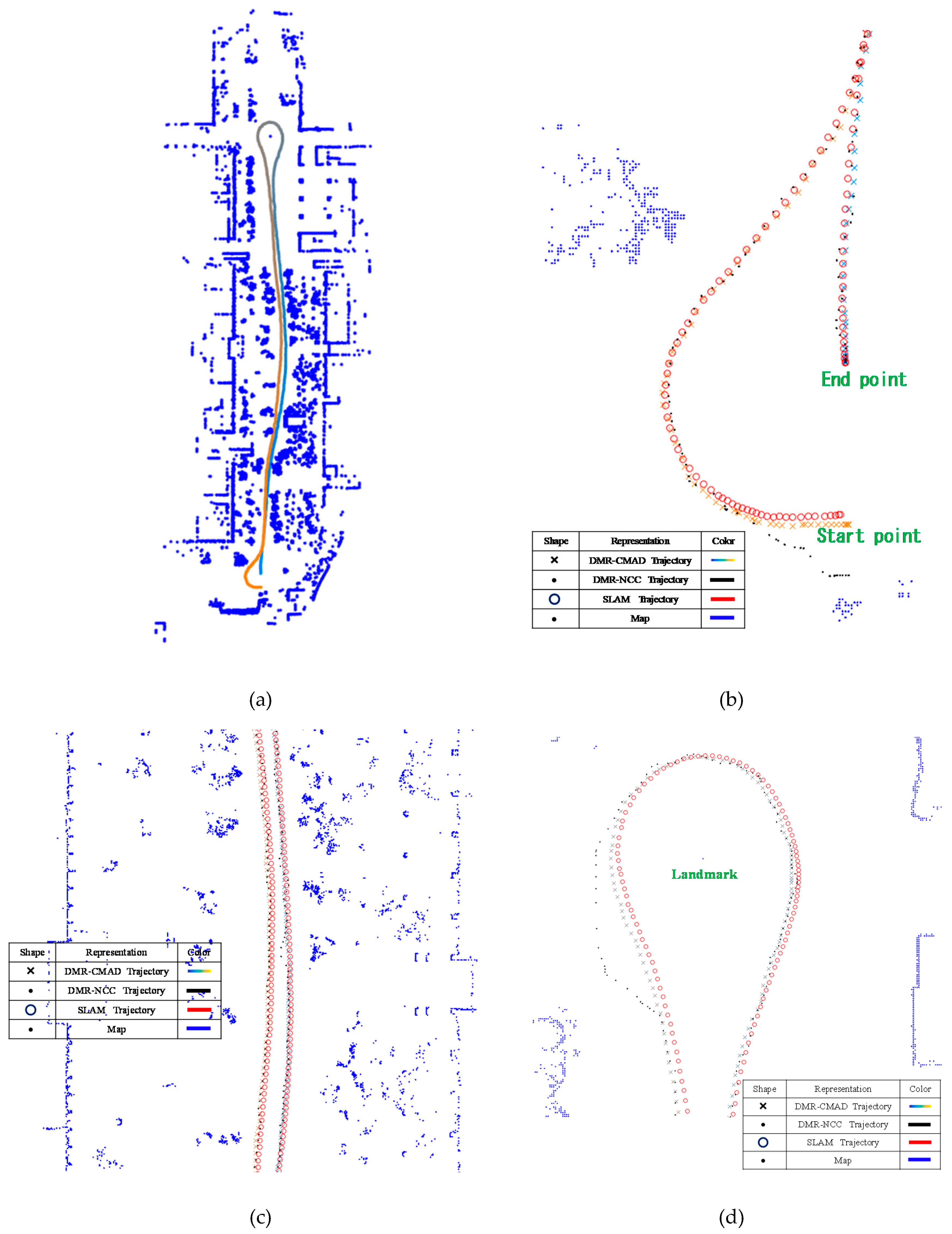
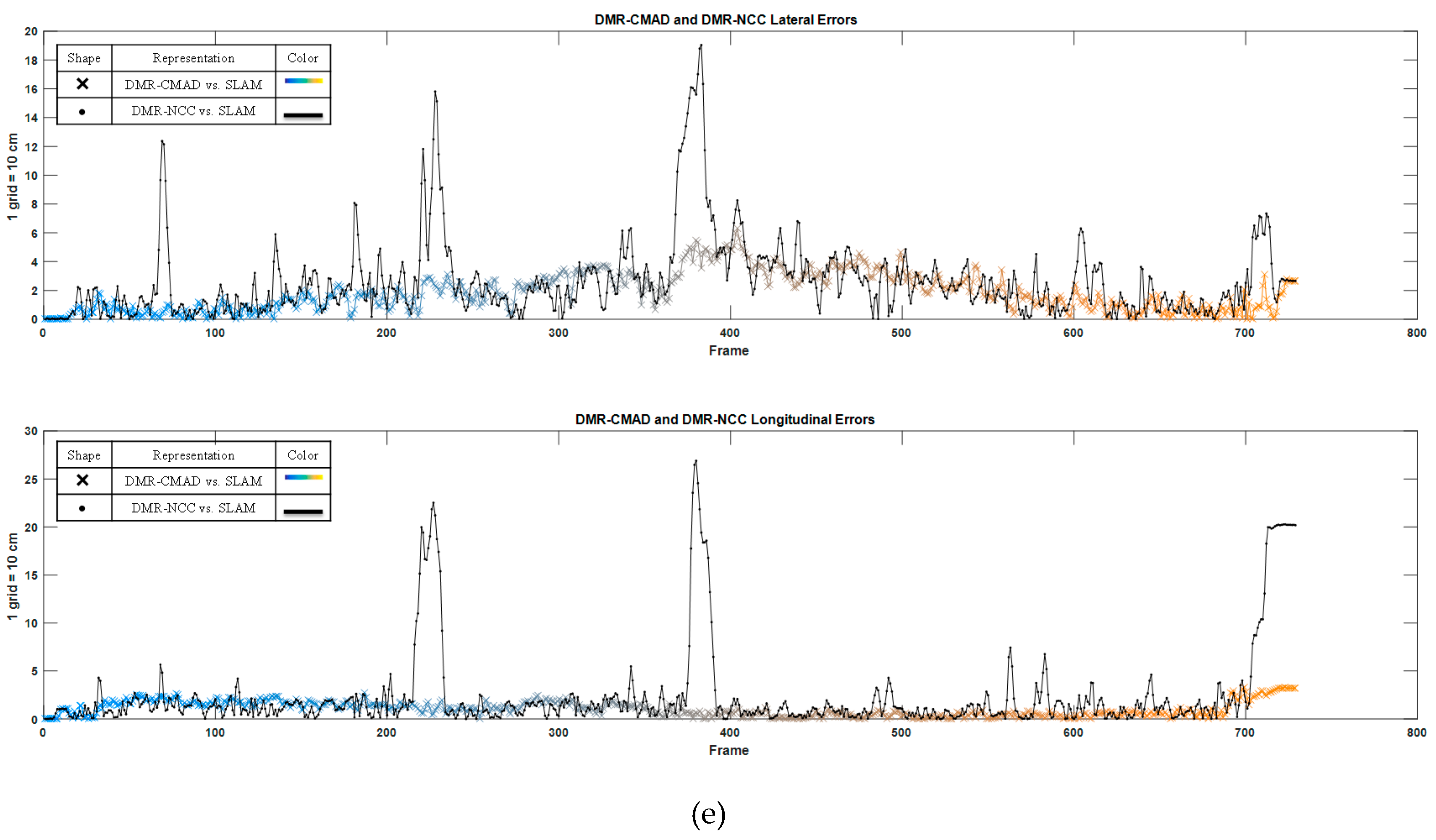
3.2.2. DMR-Based Localization
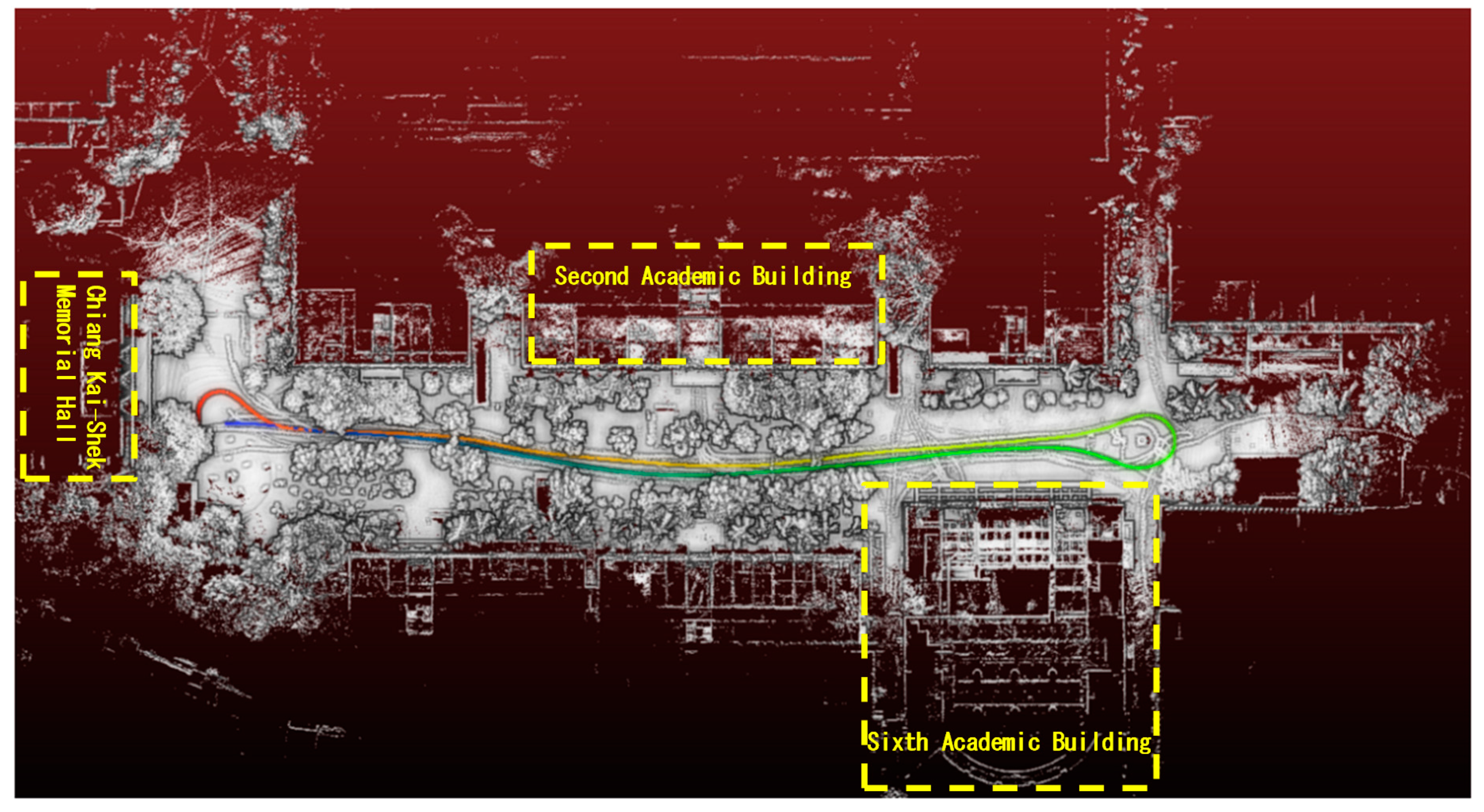
3.3. Outdoor Localization Experiment
3.3.1. Window-Based Localization
3.3.2. DMR-Based Localization
3.4. Comparison of the Indoor and Outdoor Errors
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brummelen, J.V.; O’Brien, M. Autonomous vehicle perception: The technology of today and tomorrow. Transport. Res. C 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Kamijo, S.; Gu, Y.; Hsu, L.-T. Autonomous Vehicle Technologies: Localization and Mapping. IEICE ESS Fundam. Rev. 2015, 9, 131–141. [Google Scholar] [CrossRef]
- Seo, Y.W.; Rajkumar, R. A vision system for detecting and trajectorying of stop-lines. In Proceedings of the IEEE 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 1970–1975. [Google Scholar]
- Oniga, F.; Nedevschi, S.; Meinecke, M.M. Curb detection based on elevation maps from dense stereo. In Proceedings of the IEEE International Conference on Intelligent Computer Communication and Processing, Cluj-Napoca, Romania, 6–8 September 2007; pp. 119–125. [Google Scholar]
- Enzweiler, M.; Greiner, P.; Knoppel, C.; Franke, U. Towards multicue urban curb recognition. In Proceedings of the IEEE Intelligent Vehicles Symposium 2013, Gold Coast, Australia, 23–26 June 2013; pp. 902–907. [Google Scholar]
- Nedevschi, S.; Poppescu, V.; Danescu, R.; Marita, T.; Oniga, F. Accurate ego-vehicle global localization at intersections through alignment of visual data with digital map. IEEE Trans. Intell. Transport. Syst. 2013, 14, 673–687. [Google Scholar] [CrossRef]
- Wu, T.; Ranganathan, A. Vehicle localization using road markings. In Proceedings of the IEEE Intelligent Vehicles Symposium 2013, Gold Coast, Australia, 23–26 June 2013; pp. 1185–1190. [Google Scholar]
- Gu, Y.; Tehrani, M.P.; Yendo, T.; Fujii, T.; Tanimoto, M. Traffic Sign Recognition with invariance to lighting in dual-focal active camera system. IEICE Trans. Info. Syst. 2012, 95, 1775–1790. [Google Scholar] [CrossRef]
- Hata, A.Y.; Osorio, F.S.; Wolf, D.F. Robust curb detection and vehicle localization in urban environments. In Proceedings of the IEEE Intelligent Vehicles Symposium 2014, Dearborn, MI, USA, 8–11 June 2014; pp. 1257–1262. [Google Scholar]
- Hata, A.; Wolf, D. Road marking detection using LIDAR reflective intensity data and its application to vehicle localization. In Proceedings of the IEEE 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 584–589. [Google Scholar]
- Choi, J. Hybrid map-based SLAM using a Velodyne laser scanner. In Proceedings of the IEEE 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 3082–3087. [Google Scholar]
- Thrun, S.; Montemerlo, M. The graph SLAM algorithm with applications to large-scale mapping of urban structures. Int. J. Robot. Res. 2006, 25, 403–429. [Google Scholar] [CrossRef]
- Levinson, J.; Montemerlo, M.; Thrun, S. Map-based precision vehicle localization in urban environments. In Proceedings of the Robotics: Science and Systems, Atlanta, GA, USA, 27–30 June 2007. [Google Scholar]
- Smith, R.; Cheesman, P. On the representation of spatial uncertainty. Int. J. Robot. Res. 1987, 5, 56–68. [Google Scholar] [CrossRef]
- Smith, R.; Self, M.; Cheeseman, P. Estimating uncertain spatial relationships in robotics. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1990; pp. 167–193. [Google Scholar]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. Fast-SLAM: A factored solution to the simultaneous localization and mapping problem. In Proceedings of the Innovative Applications of Artificial Intelligence Conference 2002, Alberta, Canada, 28 July–1 August 2002; pp. 593–598. [Google Scholar]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. Fast-SLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. In Proceedings of the International Joint Conference on Artificial Intelligence 2003, Acapulco, Mexico, 9–15 August 2003; pp. 1151–1156. [Google Scholar]
- Biber, P.; Straßer, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; 2003; pp. 2743–2748. [Google Scholar]
- Magnusson, M.; Andreasson, H.; Nüchter, A.; Lilienthal, A.J. Automatic appearance-based loop detection from 3D laser data using the normal distributions transform. J. Field Robot. 2009, 26, 892–914. [Google Scholar] [CrossRef]
- Stoyanov, T.; Magnusson, M.; Andreasson, H.; Lilienthal, A.J. Fast and accurate scan registration through minimization of the distance between compact 3d NDT representations. Int. J. Robot. Res. 2012, 31, 1377–1393. [Google Scholar] [CrossRef]
- Akai, N.; Morales, L.Y.; Takeuchi, E.; Yoshihara, Y. Robust localization using 3D NDT scan matching with experimentally determined uncertainty and road marker matching. In Proceedings of the IEEE Intelligent Vehicles Symposium, Redondo Beach, CA, USA, 11–14 June 2017; pp. 1357–1364. [Google Scholar]
- Besl, P.J.; McKay, H.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Mendes, E.; Koch, P.; Lacroix, S. ICP-based pose-graph SLAM. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 195–200. [Google Scholar]
- Cho, H.; Kim, E.K.; Kim, S. Indoor SLAM application using geometric and ICP matching methods based on line features. Robot. Auton. Syst. 2018, 100, 206–224. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Boston, MA, USA, 2005. [Google Scholar]
- Hsu, C.C.; Wong, C.C.; Teng, H.C.; Ho, C.Y. Localization of Mobile Robots via an Enhanced Particle Filter Incorporating Tournament Selection and Nelder-Mead Simplex Search. Int. J. Innov. Comput. Inf. Control 2011, 7, 3725–3737. [Google Scholar]
- Fox, D. Adapting the sample size in particle filters through KLD-sampling. Int. J. Robot. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]
- Kwok, C.; Fox, D.; Meila, M. Adaptive real-time particle filters for robot localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 2836–2841. [Google Scholar]
- Li, T.; Sun, S.; Sattar, T.P. Adapting sample size in particle filters through KLD-resampling. Electron. Lett. 2013, 49, 740–742. [Google Scholar] [CrossRef]
- Zhang, L.; Zapata, R.; Lepinay, P. Self-adaptive Monte Carlo Localization for Mobile Robots Using Range Sensors. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 1541–1546. [Google Scholar]
- Zhang, L.; Zapata, R.; Lepinay, P. Self-Adaptive Monte Carlo for Single-Robot and Multi-Robot Localization. In Proceedings of the IEEE International Conference on Automation and Logistics (ICAL’09), Shenyang, China, 5–7 August 2009; pp. 1927–1933. [Google Scholar]
- Briechle, K.; Hanebeck, U.D. Self-localization of a mobile robot using fast normalized cross correlation. In Proceedings of the 1999 IEEE Int. Conf. Systems, Man, Cybernetics, Tokyo, Japan, 12–15 October 1999; p. 362. [Google Scholar]
- Choi, M.; Choi, J.; Chung, W.K. Correlation-based scan matching using ultrasonic sensors for EKF localization. Adv. Robot. J. 2012, 26, 1495–1519. [Google Scholar] [CrossRef]
- Chong, Z.J.; Qin, B.; Bandyopadhyay, T.; Ang, M.H., Jr.; Frazzoli, E.; Rus, D. Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 1554–1559. [Google Scholar]
- Shakarji, C. Least-squares fitting algorithms of the NIST algorithm testing system. J. Res. Natl. Inst. Stand. Technol. 1998, 103, 633–641. [Google Scholar] [CrossRef] [PubMed]
- Guyon, I.; Gunn, S.; Nikravesh, M.; Zadeh, L. Feature Extraction, Foundations and Applications. Ser. Stud. Fuzz. Soft Comput. 2006, 207. [Google Scholar] [CrossRef]
- Balaguer, B.; Balakirsky, S.; Carpin, S.; Visser, A. Evaluating maps produced by urban search and rescue robots: Lessons learned from robocup. Auton. Robot. 2009, 27, 449–464. [Google Scholar] [CrossRef]
- Fernández-Madrigal, J.-A.; Claraco, J.L.B. Simultaneous Localization and Mapping for Mobile Robots: Introduction and Methods; IGI Global: Hershey, PA, USA, 2013. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Localization | NTUT B5 Parking Lot | ||
| Method (1 grid = 10 cm) | Window | DMR-CMAD | DMR–NCC |
| Lateral RMSE | 0.67 grid | 0.61 grid | 0.79 grid |
| Standard Deviation | 0.36 grid | 0.42 grid | 0.47 grid |
| Longitudinal RMSE | 0.41 grid | 0.48 grid | 0.78 grid |
| Standard Deviation | 0.26 grid | 0.32 grid | 0.55 grid |
| Localization | NTUT Campus | ||
| Method (1 grid = 10 cm) | Window | DMR-CMAD | DMR–NCC |
| Lateral RMSE | 2.16 grid | 2.27 grid | 3.91 grid |
| Standard Deviation | 1.17 grid | 1.33 grid | 2.83 grid |
| Longitudinal RMSE | 1.25 grid | 1.31 grid | 5.25 grid |
| Standard Deviation | 0.75 grid | 0.78 grid | 4.63 grid |
| Location | NTUT B5 Parking Lot (734 Frames) | |||
| Method | Window | DMR–CMAD | DMR–NCC | SLAM |
| Time/Frame (s) | 0.23 | 0.2 | 0.76 | 4.26 |
| Location | NTUT Campus (1274 frames) | |||
| Method | Window | DMR–CMAD | DMR–NCC | SLAM |
| Time/Frame (s) | 0.7 | 0.48 | 1.03 | 3.45 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, C.-M.; Shiu, C.-W. 3D LiDAR-Based Precision Vehicle Localization with Movable Region Constraints. Sensors 2019, 19, 942. https://doi.org/10.3390/s19040942
Hsu C-M, Shiu C-W. 3D LiDAR-Based Precision Vehicle Localization with Movable Region Constraints. Sensors. 2019; 19(4):942. https://doi.org/10.3390/s19040942
Chicago/Turabian StyleHsu, Chih-Ming, and Chung-Wei Shiu. 2019. "3D LiDAR-Based Precision Vehicle Localization with Movable Region Constraints" Sensors 19, no. 4: 942. https://doi.org/10.3390/s19040942