A Wear Debris Segmentation Method for Direct Reflection Online Visual Ferrography †


Abstract
:1. Introduction
2. Methods
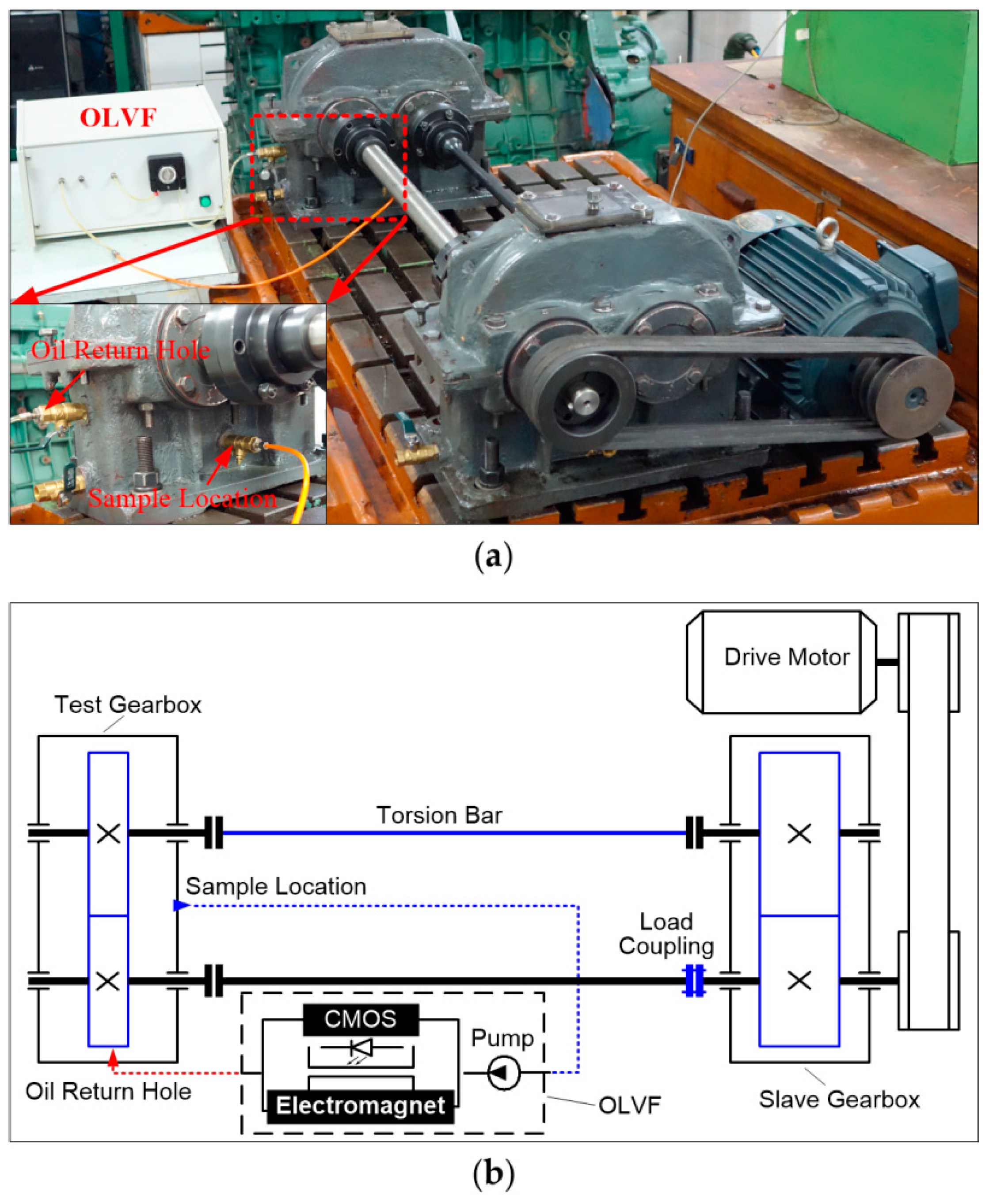
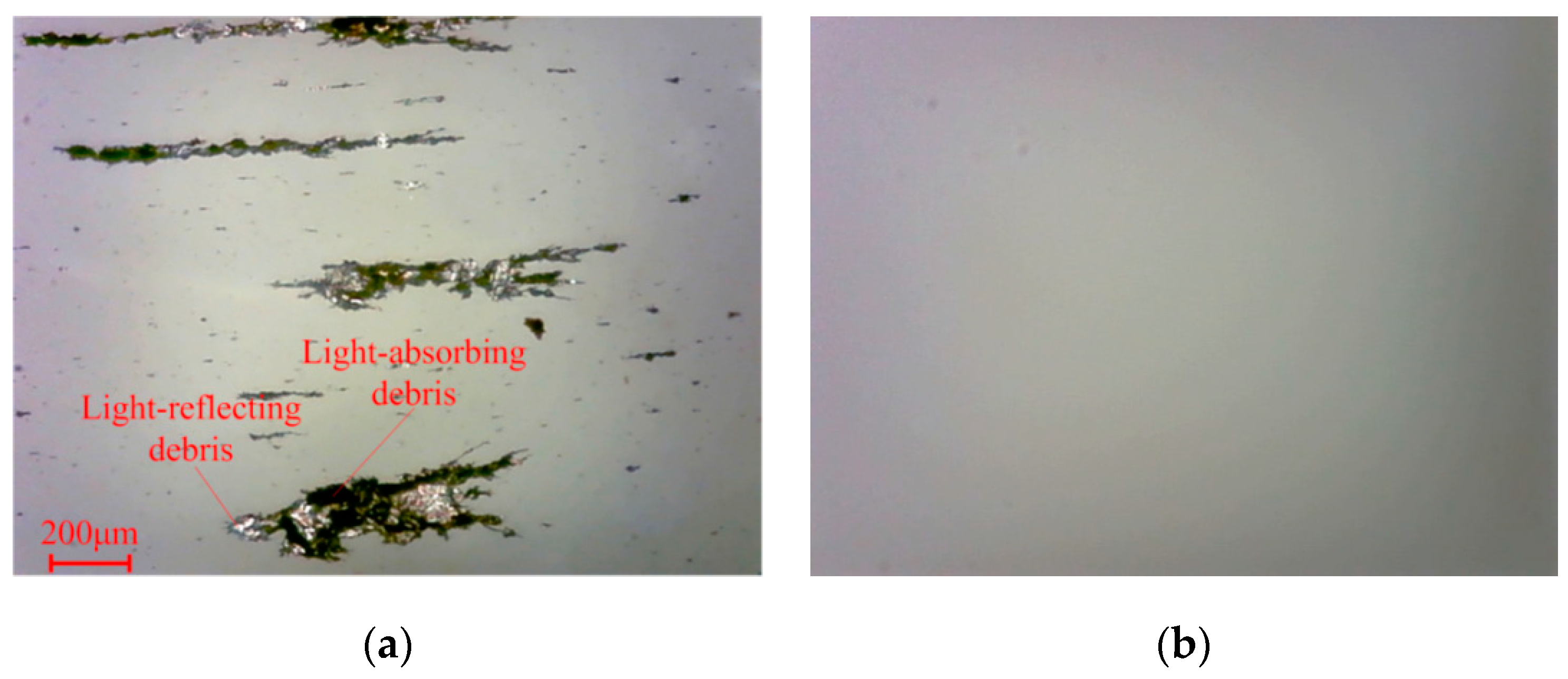
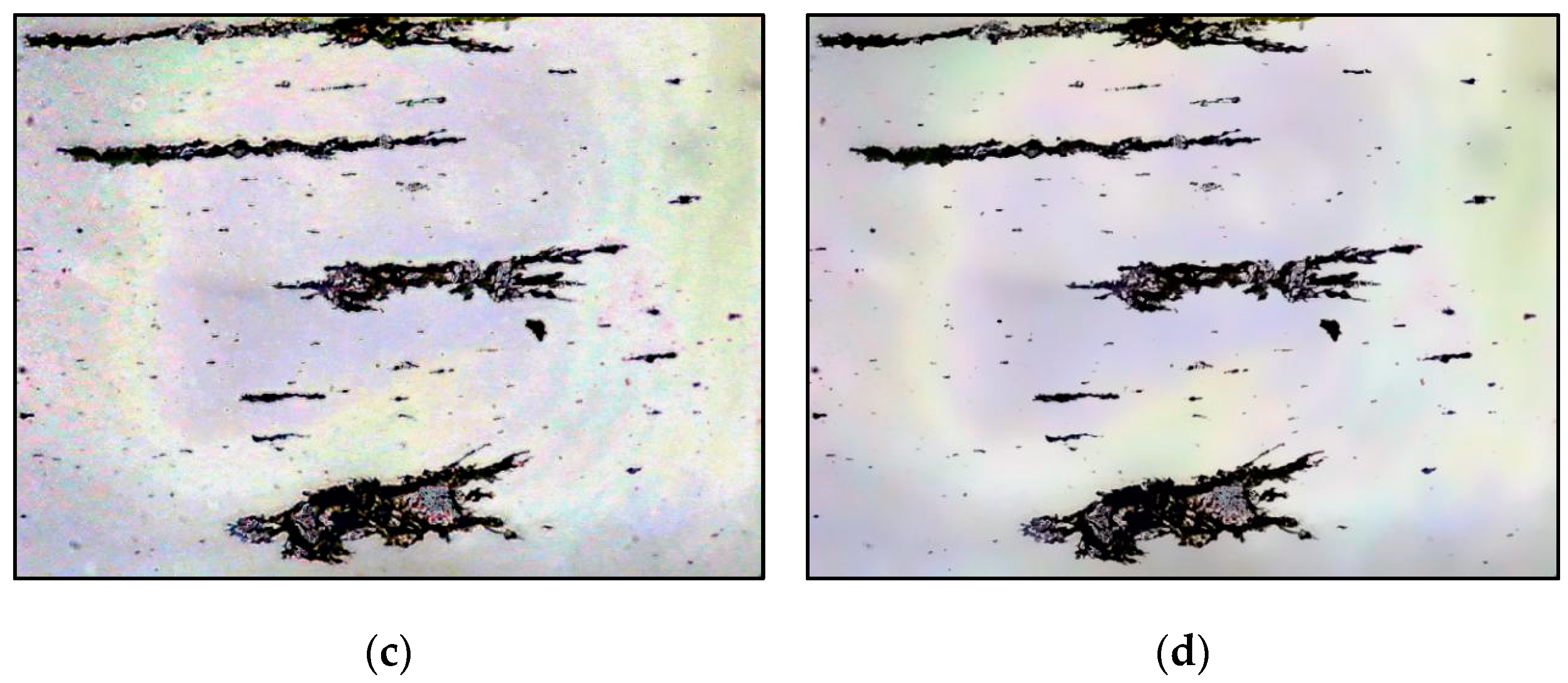
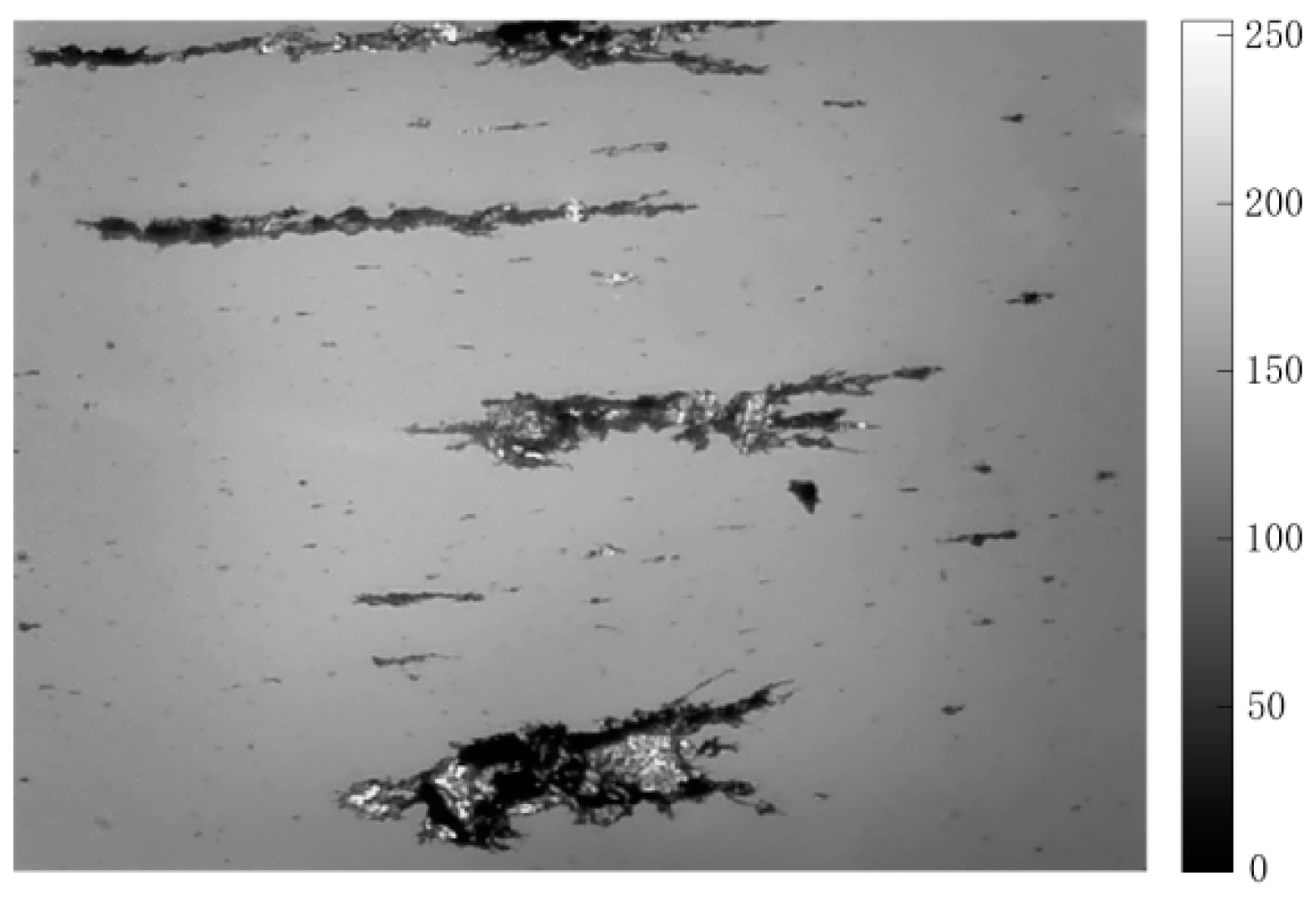
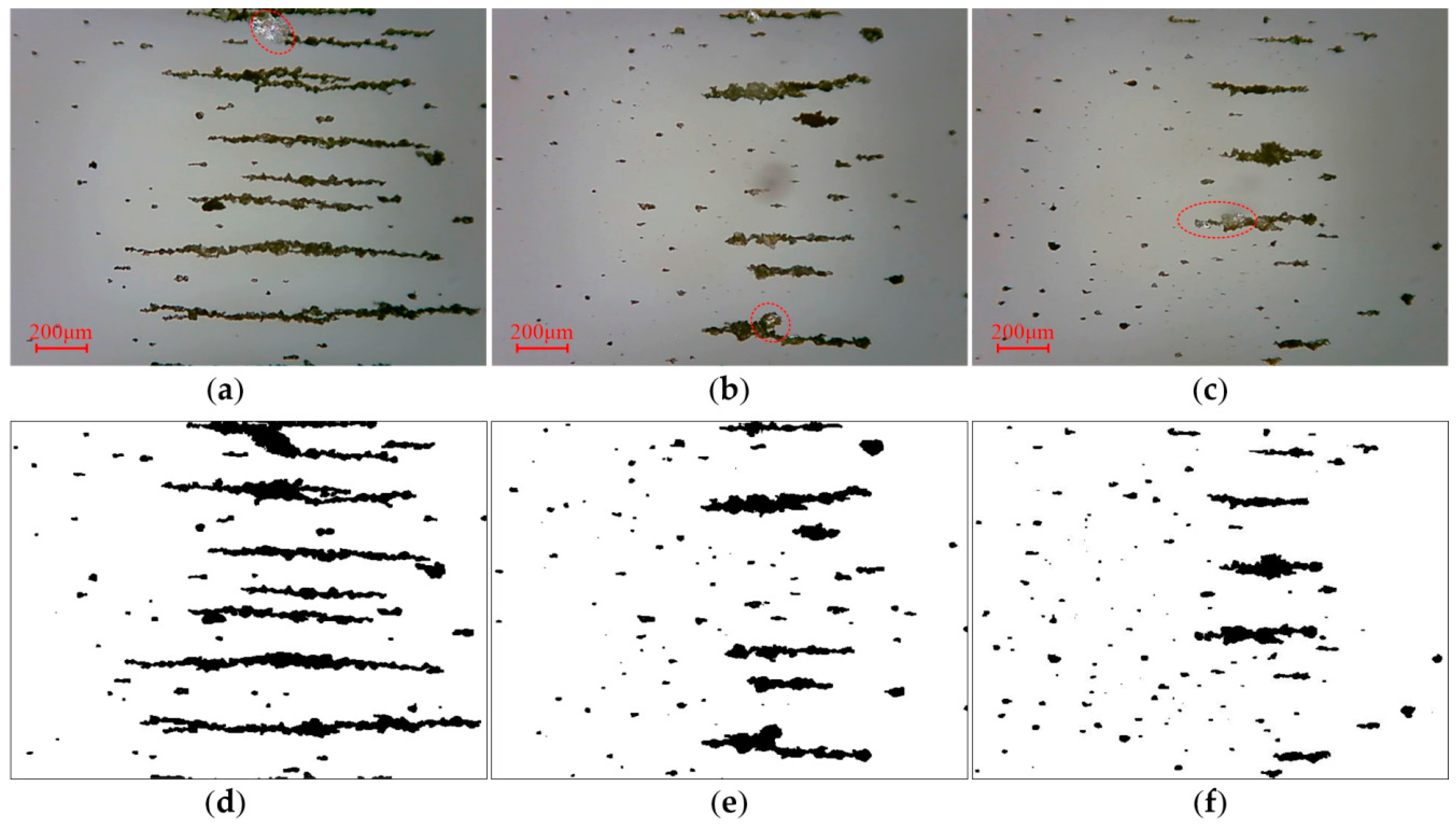
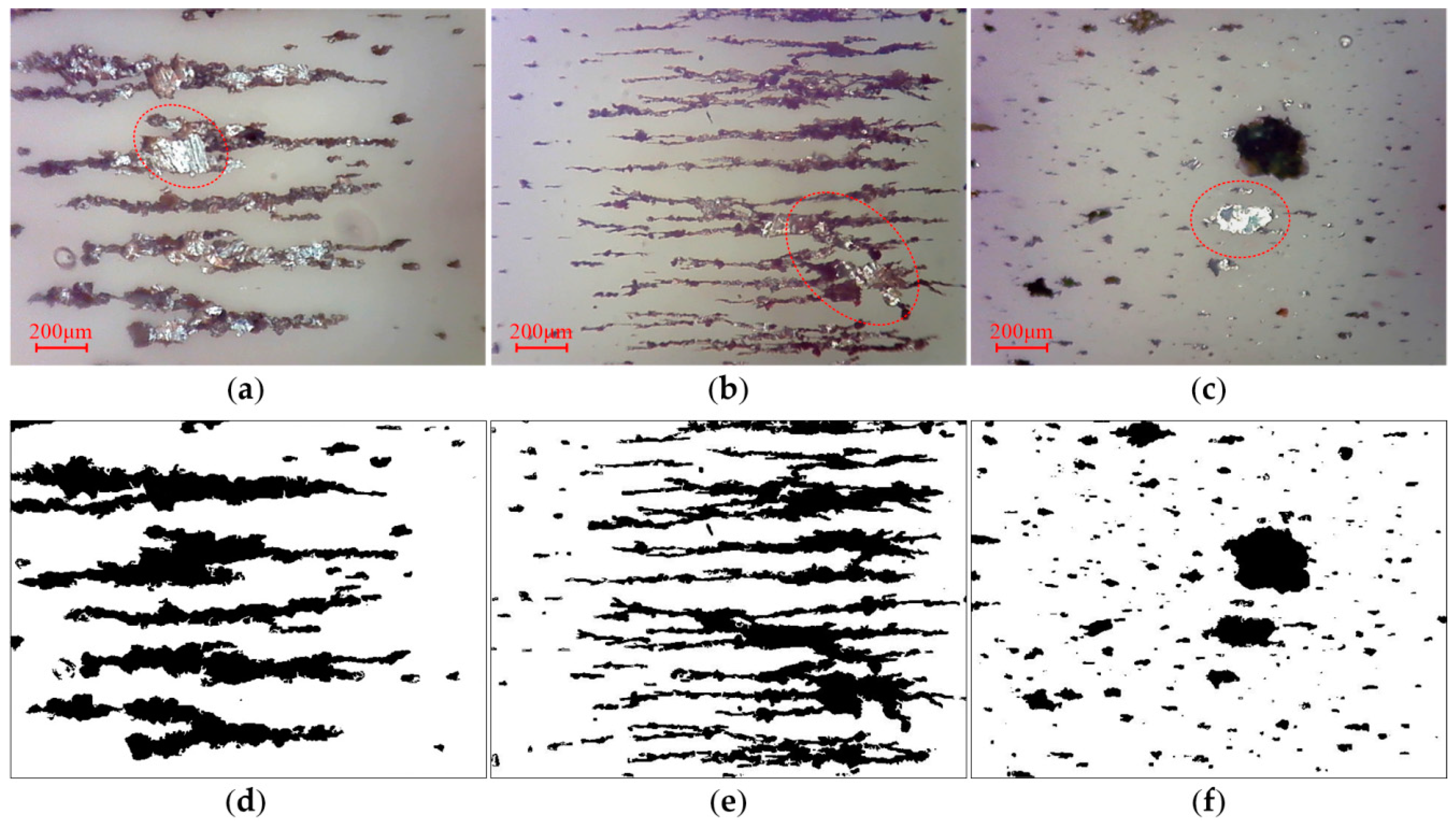
2.1. Wear Debris Image
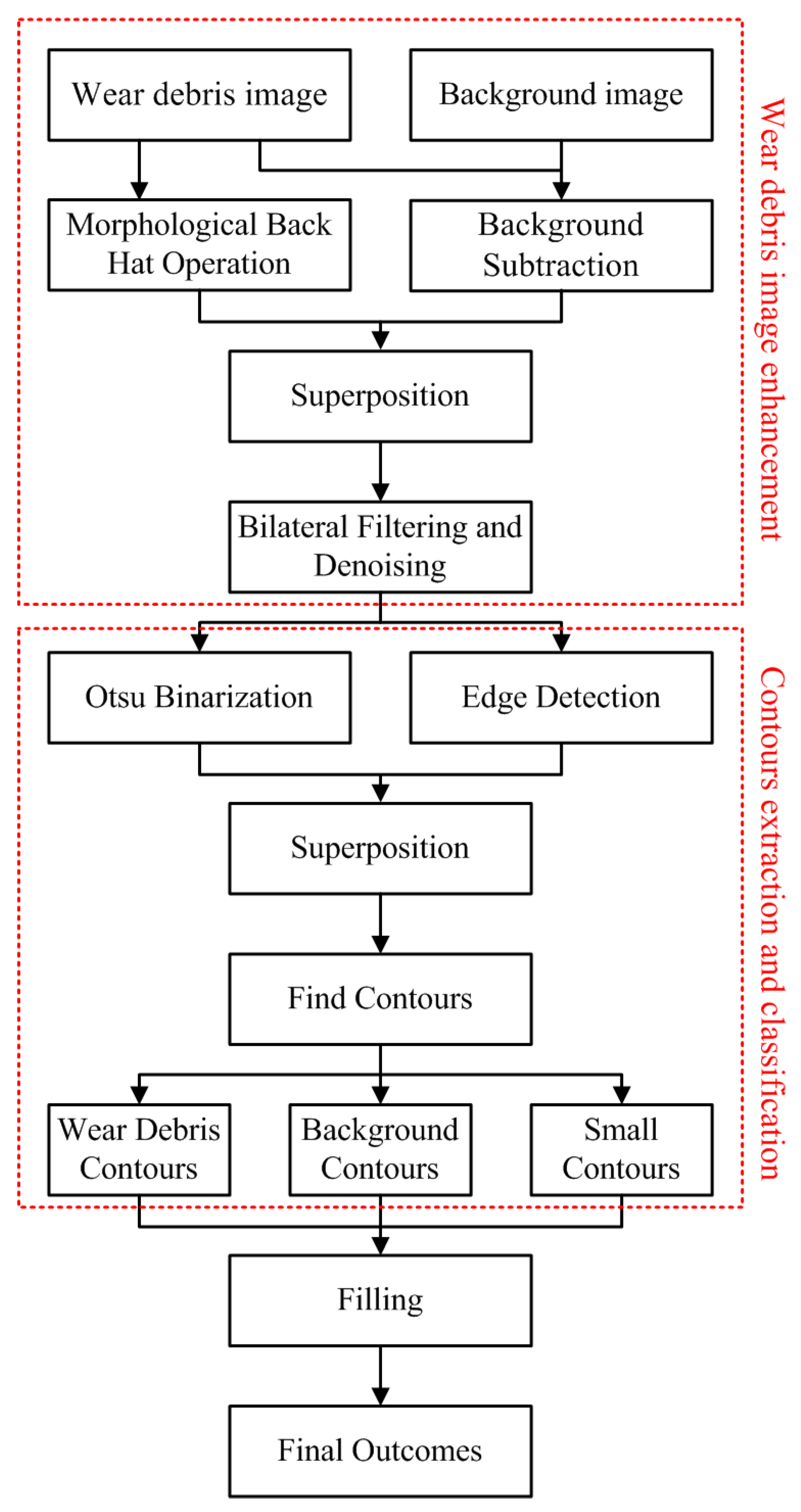
2.2. Wear Debris Image Enhancement
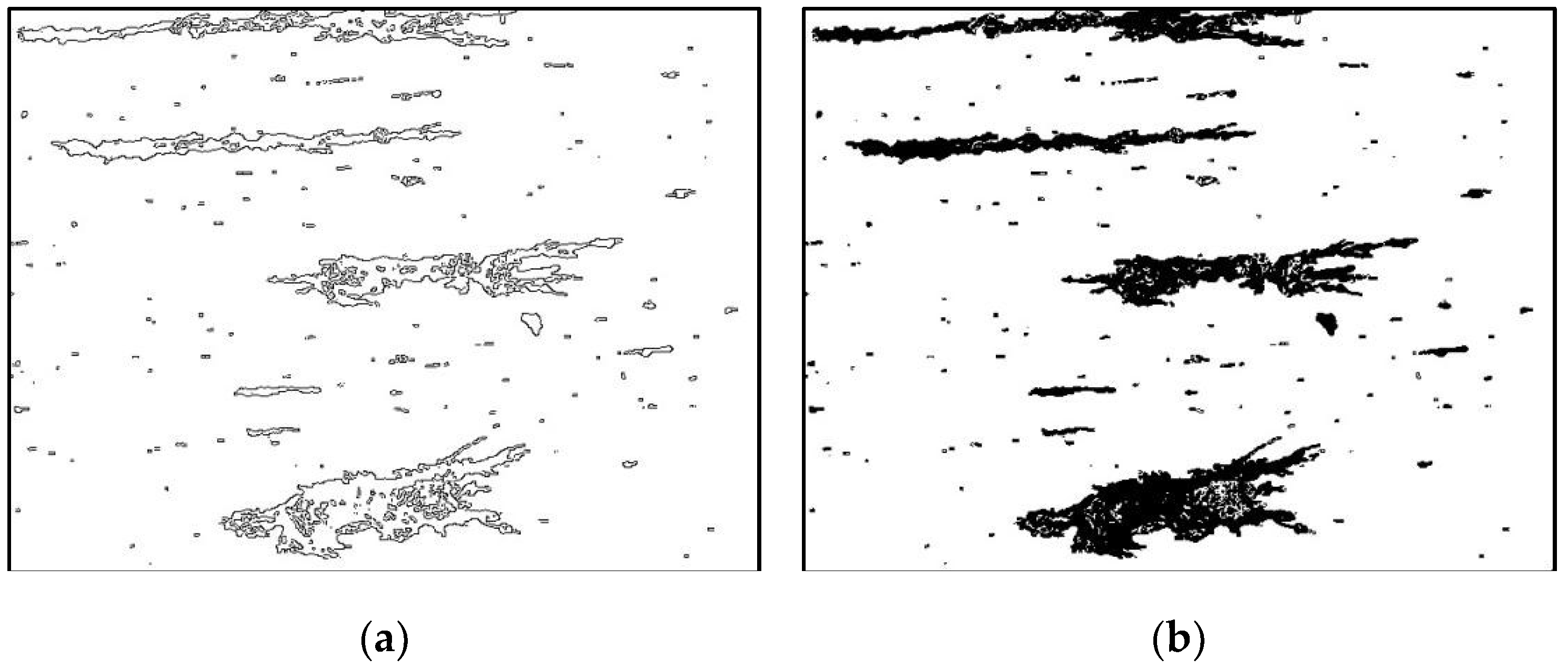
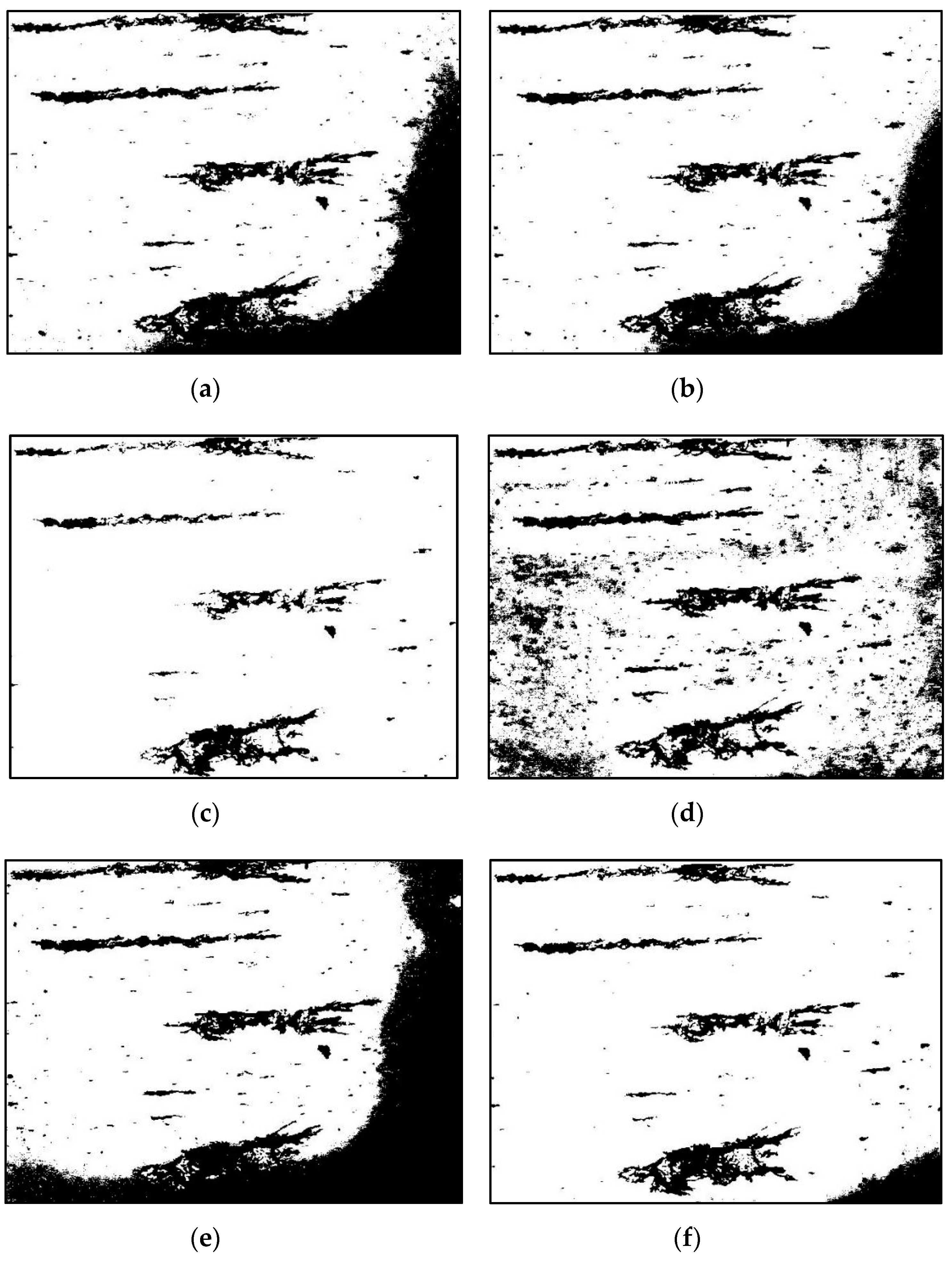
2.3. Initial Segmentation of Wear Debris Edge Detection Based on an Adaptive Canny Operator
- Select an initial estimate for threshold T0;
- The self-adaptive canny algorithm steps are as follows. The image is segmented using a threshold T0 in which case two sets of pixels are generated: Image G1 is constituted by all pixels with a gray value greater than or equal to T0, and image G2 is constituted by all pixels with a gray value smaller than T0;
- Calculate the average gray values μ1 and μ2 in the range of G1 and G2;
- Calculate new thresholds T = (μ1 + μ2)/2;
- Repeat steps 2 through 4 until the threshold changes in successive iterations are smaller than the pre-specified parameters T0.
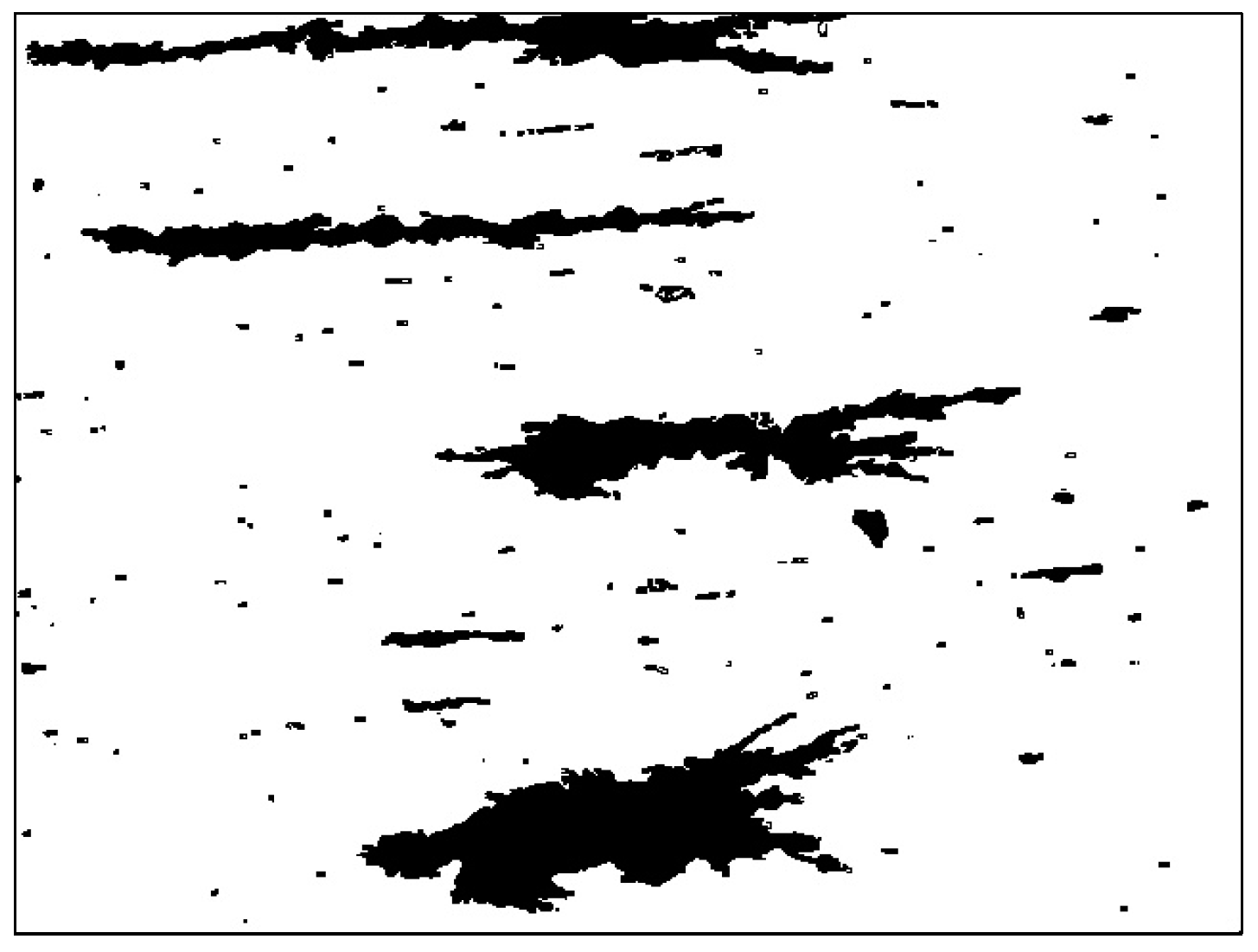
2.4. Contour Classification
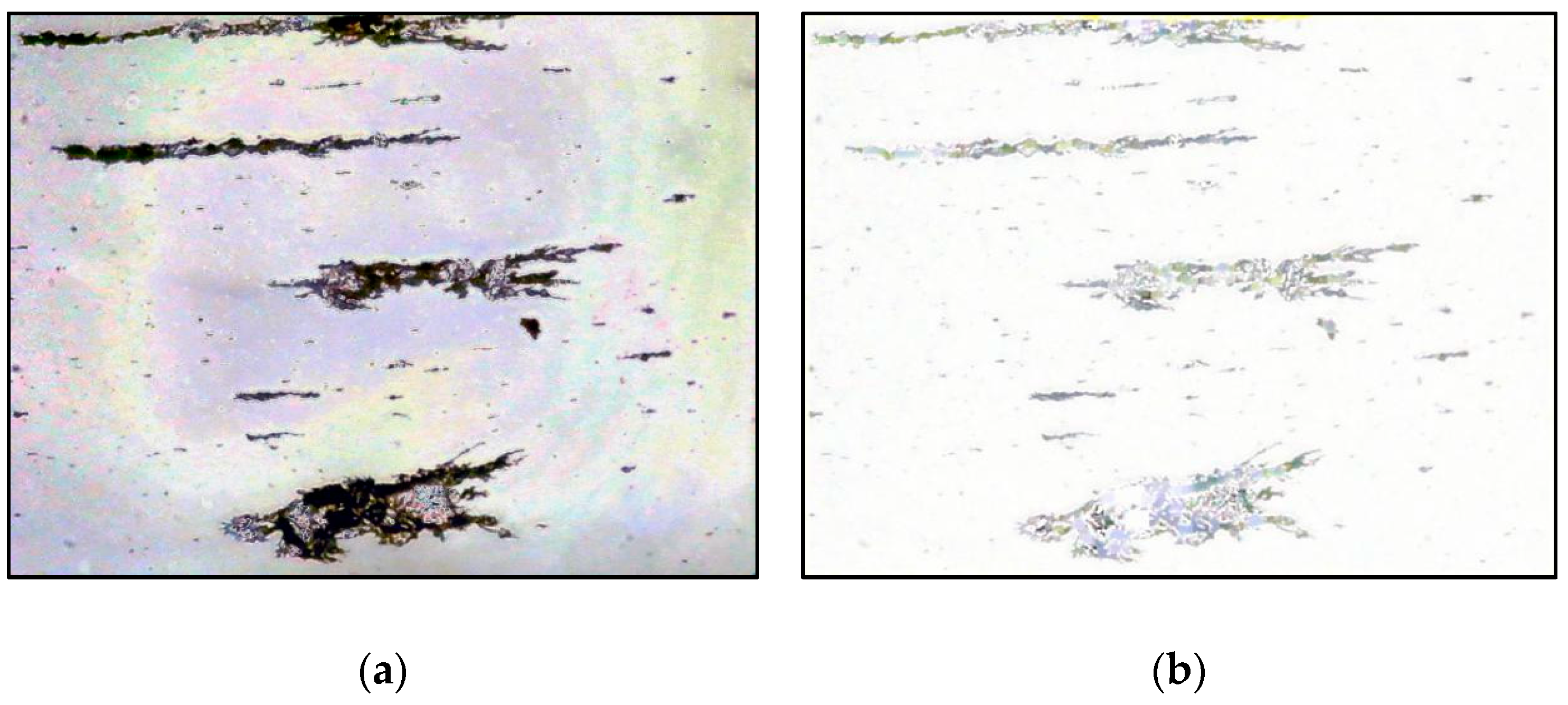
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yuan, C.Q.; Yan, X.P.; Peng, Z. Prediction of surface features of wear components based on surface characteristics of wear debris. Wear 2006, 263, 1513–1517. [Google Scholar] [CrossRef]
- Kumar, A.; Ghosh, S.K. Size distribution analysis of wear debris generated in HEMM engine oil for reliability assessment: A statistical approach. Measurement 2010, 131, 412–418. [Google Scholar] [CrossRef]
- Cho, U.; Tichy, J.A. Quantitative correlation of wear debris morphology: Grouping and classification. Tribol. Int. 2000, 33, 461–467. [Google Scholar] [CrossRef]
- Ebersbach, S.; Peng, Z.; Kessissoglou, N.J. The investigation of the condition and faults of a spur gearbox using vibration and wear debris analysis techniques. Wear 2006, 260, 16–24. [Google Scholar] [CrossRef]
- Liu, W. Handbook of Materials Failure Analysis with Case Studies from the Chemicals, Concrete and Power Industries; Butterworth-Heinemann: Waltham, MA, USA, 2015; pp. 311–353. [Google Scholar]
- Zhu, X.; Zhong, C.; Zhe, J. Lubricating oil conditioning sensors for online machine health monitoring—A review. Tribol Int. 2017, 109, 473–484. [Google Scholar] [CrossRef]
- Iwai, Y.; Honda, T.; Miyajima, T.; Yoshinaga, S.; Higashi, M.; Fuwa, Y. Quantitative estimation of wear amounts by real time measurement of wear debris in lubricating oil. Tribol. Int. 2010, 43, 388–394. [Google Scholar] [CrossRef]
- Wang, S.; Wu, T.H.; Yang, L.F.; Kwok, N.M.; Sarkodie-Gyan, T.P. Three-dimensional reconstruction of wear particle surface based on photometric stereo. Measurement 2019, 133, 350–360. [Google Scholar] [CrossRef]
- Wu, H.K.; Li, R.W.; Kwok, N.M.; Peng, Y.P.; Wu, T.H.; Peng, Z.X. Restoration of low-informative image for robust debris shape measurement in on-line wear debris monitoring. Mech. Syst. Signal Process. 2019, 114, 539–555. [Google Scholar] [CrossRef]
- Peng, Y.P.; Wu, T.H.; Cao, G.Z.; Huang, S.D.; Wu, H.K.; Kwok, N.M.; Peng, Z.X. A hybrid search-tree discriminant technique for multivariate wear debris classification. Wear 2017, 392, 152–158. [Google Scholar] [CrossRef]
- Peng, Y.P.; Wu, T.H.; Wang, S.; Peng, Z.X. Oxidation wear monitoring based on the color extraction of on-line wear debris. Wear 2015, 332, 1151–1157. [Google Scholar] [CrossRef]
- Mabe, J.; Zubia, J.; Gorritxategi, E. Photonic Low Cost Micro-Sensor for in-Line Wear Particle Detection in Flowing Lube Oils. Sensors 2017, 17, 586. [Google Scholar] [CrossRef] [PubMed]
- Roylance, B.J. Ferrography—Then and now. Tribol. Int. 2005, 38, 857–862. [Google Scholar] [CrossRef]
- Chourasia, S.; Patel, P.D.; Lakdawala, A.; Patel, R.N. Study on tribological behavior of biodiesel – Diethyl ether (B20A4) blend for long run test on compression ignition engine. Fuel 2018, 230, 64–77. [Google Scholar] [CrossRef]
- Yuan, C.Q.; Peng, Z.; Zhou, X.C.; Yan, X.P. The surface roughness evolutions of wear particles and wear components under lubricated rolling wear condition. Wear 2005, 259, 512–518. [Google Scholar] [CrossRef]
- Dai, X.J.; Wang, Y.; Yu, S.Q. Ferrographic analysis of pivot jewel bearing in oil-bath lubrication. Wear 2017, 376, 843–850. [Google Scholar] [CrossRef]
- Xiao, H.L. The development of ferrography in China—Some personal reflections. Tribol. Int. 2005, 38, 904–907. [Google Scholar] [CrossRef]
- Wu, T.H.; Mao, J.H.; Wang, J.T.; Wu, J.Y.; Xie, Y.B. A New On-Line Visual Ferrograph. Tribol. Int. 2009, 52, 623–631. [Google Scholar] [CrossRef]
- Wu, T.; Wu, H.; Du, Y.; Kwok, N.M.; Peng, Z.X. Imaged wear debris separation for on-line monitoring using gray level and integrated morphological features. Wear 2014, 316, 19–29. [Google Scholar] [CrossRef]
- Cao, W.; Dong, G.; Xie, Y.B.; Peng, Z. Prediction of wear trend of engines via on-line wear debris monitoring. Tribol. Int. 2018, 120, 510–519. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Mao, J.H.; Xie, Y.B. Engine Wear Monitoring with OLVF. Tribol. Trans. 2011, 54, 201–207. [Google Scholar] [CrossRef]
- Fan, B.; Feng, S.; Che, Y.T.; Mao, J.H.; Xie, Y.B. An oil monitoring method of wear evaluation for engine hot tests. Int. J. Adv. Manuf. Technol. 2018, 94, 3199–3207. [Google Scholar] [CrossRef]
- Feng, S.; Fan, B.; Mao, J.H.; Xie, Y.B. Prediction on Wear of a Spur Gearbox by On-Line Oil Debris Concentration Monitoring. Wear 2015, 336, 1–8. [Google Scholar] [CrossRef]
- Li, B.; Feng, S.; Mao, J.H.A. Design Method and Its Implementation of an LED Array Reflecting Light for On-Line Visual Ferrograph. J. Xi’an Jiaotong Univ. 2014, 48, 29–34. [Google Scholar]
- Li, B.; Feng, S.; Mao, J.H. Illumination Uniformity of an Imaging System for On-Line Visual Ferrograph. Opt. Precis. Eng. 2016, 24, 2347–2356. [Google Scholar]
- Li, B.; Xi, Y.H.; Feng, S.; Mao, J.H.; Xie, Y.H. A direct reflection OLVF debris detector based on dark-field imaging. Meas. Sci. Technol. 2018, 29, 065104. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.F.; Qiu, G.; Feng, S.; Han, L. Segmentation of Wear Debris Based on Edge Detection and Contour Classification. In Proceedings of the 2018 International Conference on Sensing, Diagnostics, Prognostics, and Control, Xi’an, China, 15–17 August 2018; pp. 309–313. [Google Scholar]
- Kirk, T.B.; Panzera, D.; Anamalay, R.V.; Xu, Z.L. Computer image analysis of wear debris for machine condition monitoring and fault diagnosis. Wear 1995, 181, 717–722. [Google Scholar] [CrossRef]
- Wang, J.Q.; Bi, J.; Wang, L.G.; Wang, X.L. A non-reference evaluation method for edge detection of wear particles in ferrograph images. Mech. Syst. Signal Process. 2018, 100, 863–876. [Google Scholar] [CrossRef]
- Wang, J.Q.; Bi, J.; Wang, L.G.; Wang, X.L. A wear particle identification method by combining principal component analysis and grey relational analysis. Wear 2013, 304, 96–102. [Google Scholar] [CrossRef]
- Yuan, W.; Chin, K.S.; Hua, H.; Dong, G.G.; Wang, C.H. Shape classification of wear particles by image boundary analysis using machine learning algorithms. Mech. Syst. Signal Process. 2016, 72, 346–358. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Pinion | Wheel |
|---|---|---|
| Number of teeth | 17 | 24 |
| Module (mm) | 6 | |
| Center distance (mm) | 125 | |
| Pressure angle (°) | 20 | |
| Addendum modification | +0.282 | +0.0707 |
| Face width (mm) | 10 | |
| Roughness Ra (μm) | 2–3 | |
| Hardness (HRC) | 40–45 | |
| Material | 45# | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, S.; Qiu, G.; Luo, J.; Han, L.; Mao, J.; Zhang, Y. A Wear Debris Segmentation Method for Direct Reflection Online Visual Ferrography. Sensors 2019, 19, 723. https://doi.org/10.3390/s19030723
Feng S, Qiu G, Luo J, Han L, Mao J, Zhang Y. A Wear Debris Segmentation Method for Direct Reflection Online Visual Ferrography. Sensors. 2019; 19(3):723. https://doi.org/10.3390/s19030723
Chicago/Turabian StyleFeng, Song, Guang Qiu, Jiufei Luo, Leng Han, Junhong Mao, and Yi Zhang. 2019. "A Wear Debris Segmentation Method for Direct Reflection Online Visual Ferrography" Sensors 19, no. 3: 723. https://doi.org/10.3390/s19030723