Artificial Neural Network Application for Current Sensors Fault Detection in the Vector Controlled Induction Motor Drive


Abstract
:1. Introduction
2. Current Sensor Faults Analysis
3. Fault Tolerant Control (FTC) Analysis
- (1)
- Defining the types of analyzed faults;
- (2)
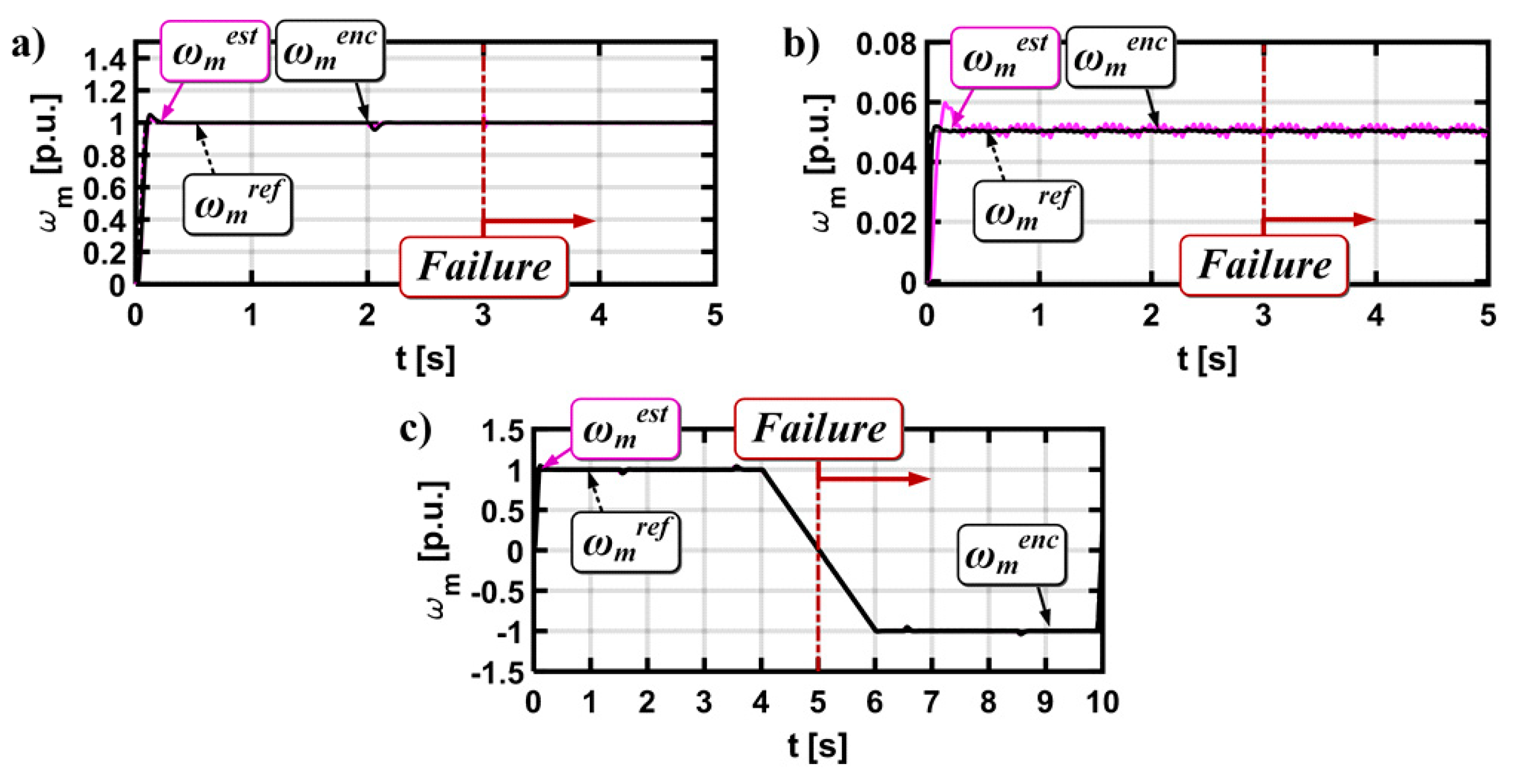
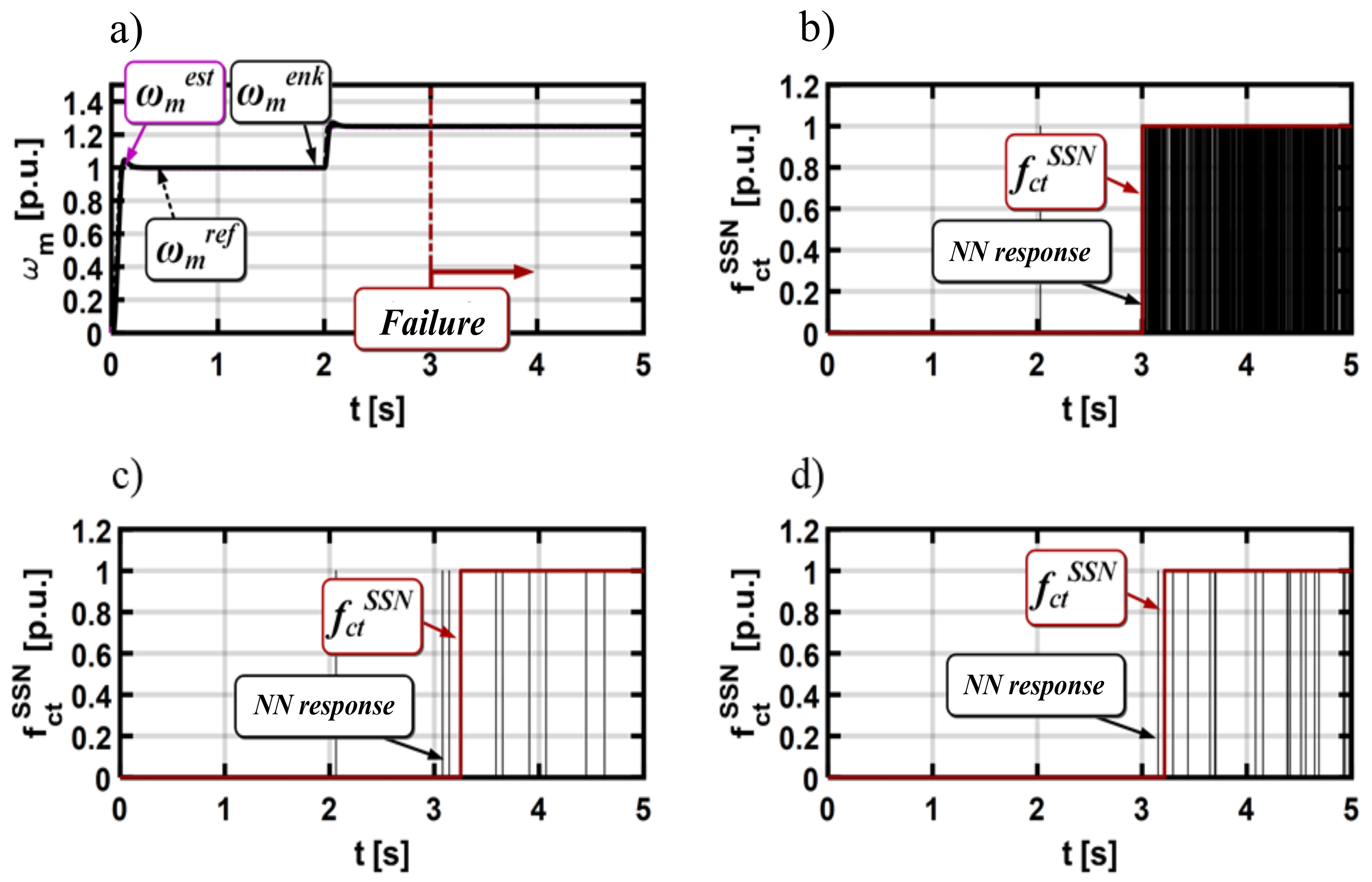
- Determining the normal state of system operation (without faults) and emergency state operation of the drive (after failure occurrence);
- (3)
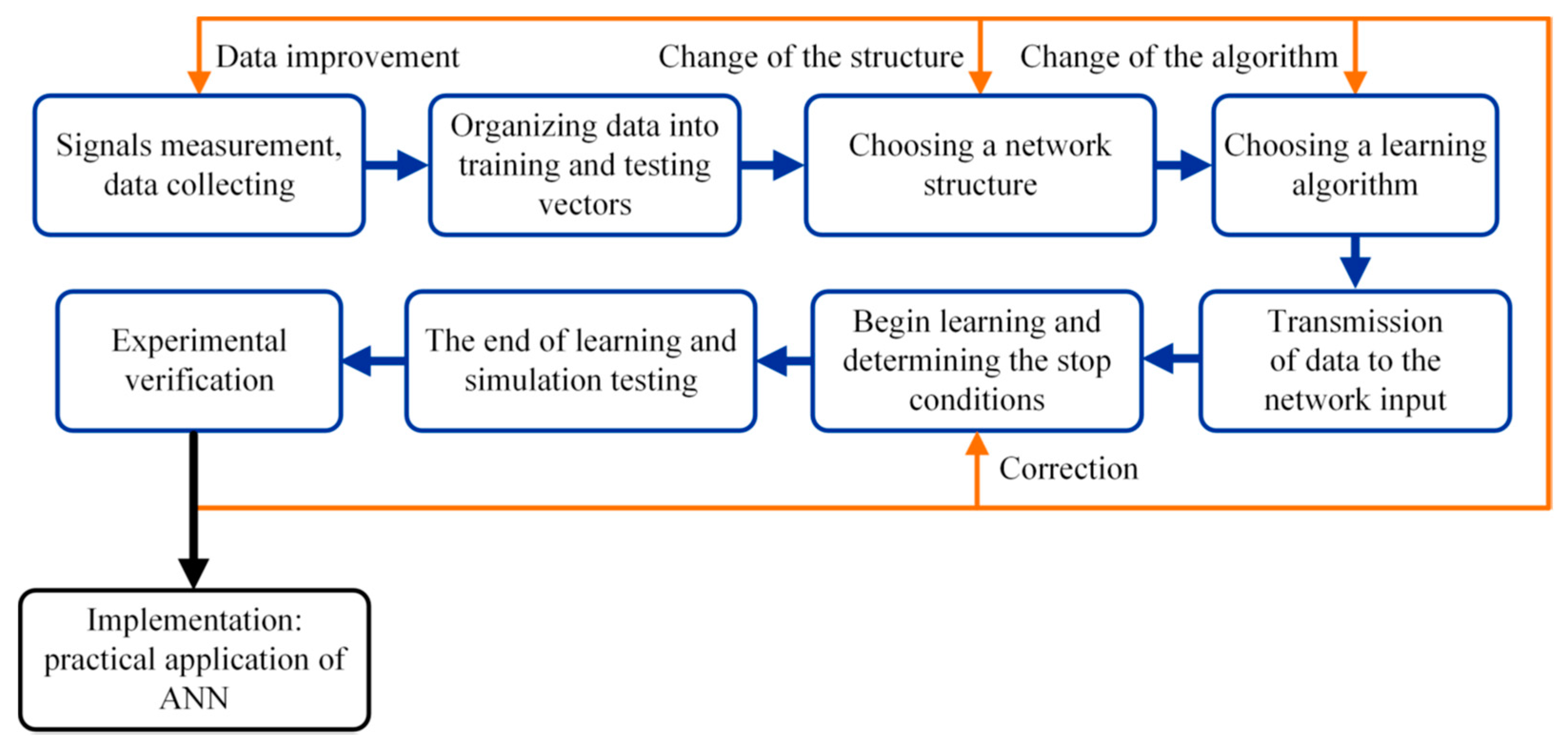
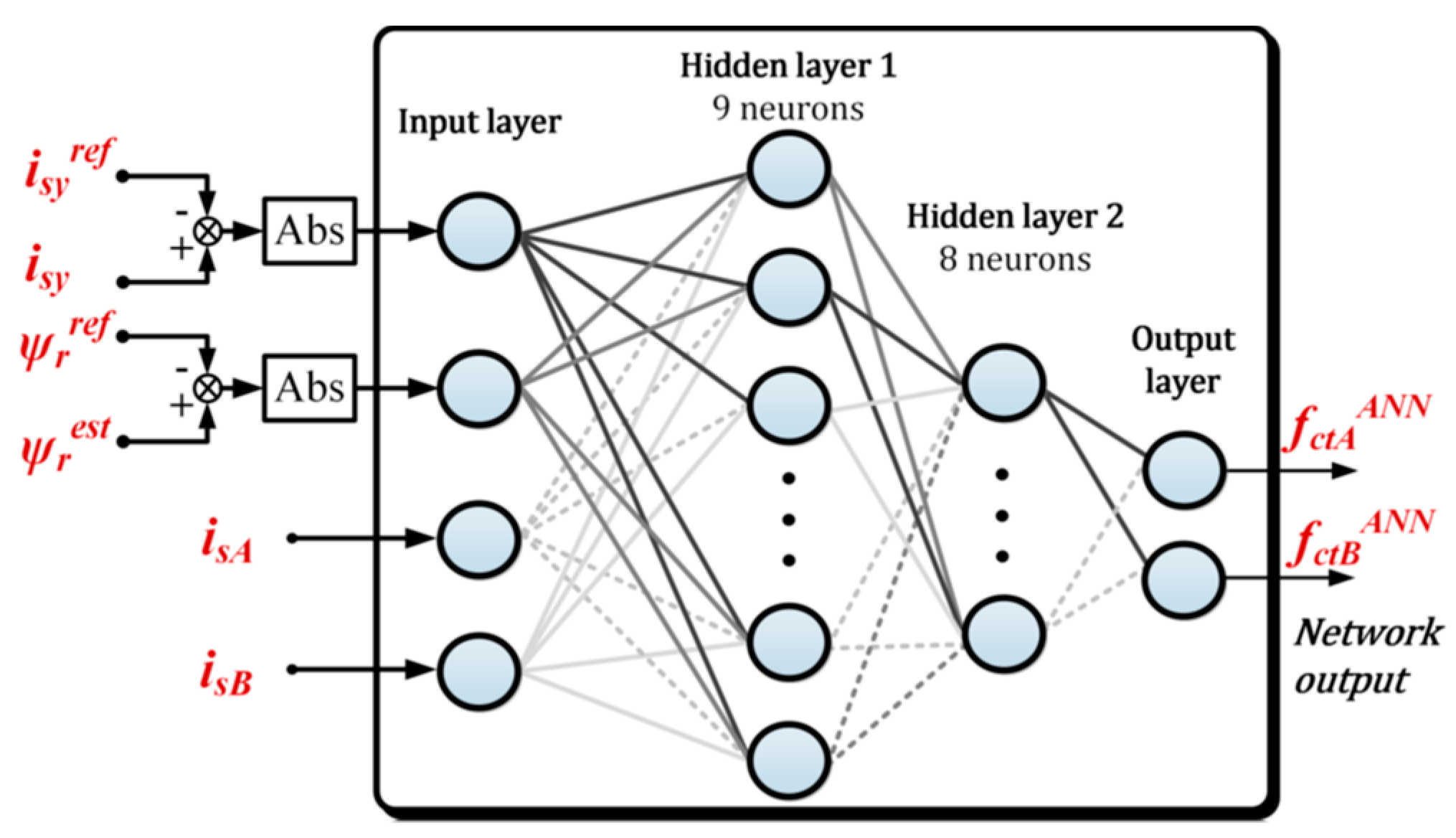
- Designing a neural fault detector: selection of learning signals, network structure, and learning algorithm; simulation testing using computer simulators of neural networks (e.g., MATLAB Neural Network Toolbox); and
- (4)
- Implementation of a neural network on a real object and its experimental testing.
- (1)
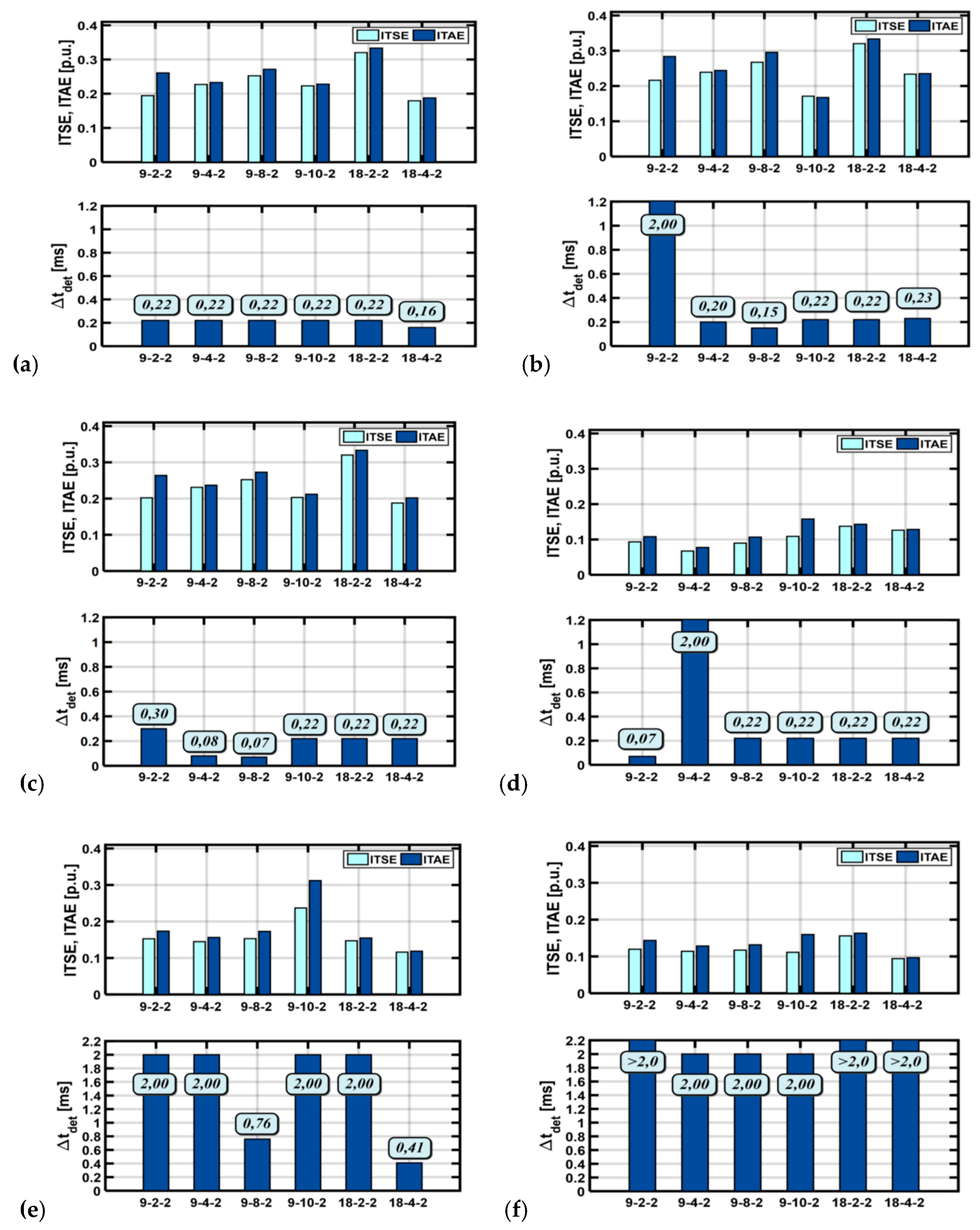
- (N) - (2N+1) - (2) - (1),
- (2)
- (N) - (2N+1) - (4) - (1),
- (3)
- (N) - (2N+1) - (8) - (1),
- (4)
- (N) - (2N+1) - (10) - (1), and
- (5)
- (N) - 2(2N+1) - (2) - (1),
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Isermann, R. Fault Diagnosis Systems. An Introduction from Fault Detection to Fault Tolerance; Springer: New York, NY, USA, 2006. [Google Scholar]
- Schrick, D. Remarks on terminology in the field of supervision, fault detection and diagnosis. IFAC Proc. Vol. 1997, 30, 959–964. [Google Scholar] [CrossRef]
- Orłowska-Kowalska, T.; Kowalski, C.T.; Dybkowski, M. Fault-Diagnosis and Fault-Tolerant-Control in Industrial Processes and Electrical Drives. In Advanced Control of Electrical Drives and Power Electronic Converters; Springer International Publishing: Cham, Switzerland, 2017; pp. 101–120. [Google Scholar]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Jiang, L. Sensor Fault Detection and Isolation Using System Dynamics Identification Techniques. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2011. [Google Scholar]
- Isermann, R. Fault-Diagnosis Applications, Model-Based Condition Monitoring: Actuators, Drives, Machinery, Plants, Sensors, and Fault-Tolerant Systems; Springer: Berlin, Germany, 2011. [Google Scholar]
- Hu, F.; Luo, D.; Luo, C.; Long, Z.; Wu, G. Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives. Energies 2018, 11, 3087. [Google Scholar] [CrossRef]
- Boukhari, M.R.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle. Sensors 2018, 18, 1893. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Fan, S.; Zou, J. Sensor fault detection and fault tolerant control of Induction motor drivers for electric vehicles. In Proceedings of the 7th International Power Electronics and Motion Control conference IPEMC, Harbin, China, 2–5 June 2012. [Google Scholar]
- Dybkowski, M.; Klimkowski, K.; Orlowska-Kowalska, T. Speed sensor fault tolerant direct torque control of induction motor drive. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014. [Google Scholar]
- Klimkowski, K.; Dybkowski, M.; Orłowska-Kowalska, T. Speed and current sensor fault-tolerant-control of the Ind.uction motor drive. In Advanced Control of Electrical Ddrives and Power Electronic Converters; Kabziński, J., Ed.; Springer: Cham, Switzerland, 2017; pp. 141–167. [Google Scholar]
- Beard, R. Failure Accommodation in Linear System through Self Reorganization. Ph.D. Thesis, MIT, Cambridge, MA, USA, 1971. [Google Scholar]
- Chen, J.; Patton, R.J. Robust Model-Based Fault Diagnosis for Dynamic Systems (Vol. 3); Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Ding, S.X. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools; Springer-Verlag: Berlin, Germany, 2008. [Google Scholar]
- Kowalski, C.T.; Orlowska-Kowalska, T. Neural networks application for induction motor faults diagnosis. Math. Comput. Simul. 2003, 63, 435–448. [Google Scholar] [CrossRef]
- Rothenhagen, K.; Fuchs, F. Model-based fault detection of gain and offset faults in doubly fed Induction generators. In Proceedings of the 2009 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, Cargese, France, 31 August–3 September 2009. [Google Scholar]
- Dybkowski, M. Estimation of speed in a vector controlled induction motor drive-selected problems. In Scientific Papers of the Institute of Electrical Machines, Drives and Measurements; Wroclaw University of Technology: Wroclaw, Poland, 2013. (In Polish) [Google Scholar]
- Rangari, S.C.; Suryawanshi, H.M.; Renge, M. New Fault-Tolerant Control Strategy of Five-Phase Induction Motor with Four-Phase and Three-Phase Modes of Operation. Electronics 2018, 7, 159. [Google Scholar] [CrossRef]
- Sułowicz, M.; Borkowski, D.; Węgiel, T.; Weinreb, K. Specialized diagnostic system for induction motors. Przegląd Elektrotechniczny 2010, 86, 285–291. [Google Scholar]
- Benmoussa, S.; Djeziri, M.A. Remaining Useful Life estimation without needing for prior knowledge of the degradation features. IET Sci. Meas. Technol. 2017, 11, 1071–1078. [Google Scholar] [CrossRef]
- Gaeid, K.S.; Ping, H.W.; Khalid, M.; Masaoud, A. Sensor and Sensorless Fault Tolerant Control for Induction Motors Using a Wavelet Index. Sensors 2012, 12, 4031–4050. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benbouzid, M.E.H.; Kliman, G.B. What stator current processing-based technique to use for Induction motor rotor faults diagnosis. IEEE Trans. Energy Convers. 2003, 18, 238–244. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H. A review of Induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef]
- Korzonek, M.; Orłowska-Kowalska, T. Comparative Stability Analysis of Stator Current Error-based Estimators of Induction Motor Speed. Power Electron. Drives 2018, 3, 187–203. [Google Scholar] [CrossRef]
- Kowalski, C.T.; Kamiński, M. Rotor fault detector of the converter-fed Induction motor based on RBF neural network. Bull. Polish Acad. Sci. Tech. Sci. 2014, 62, 69–76. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control; Springer: Berlin, Germany, 2003. [Google Scholar]
- Betta, G.; D’Apuzzo, M. Pietrosanta, A. A knowledge-based approach to instrument fault detection and isolation. IEEE Trans. Instrum. Meas. 1995, 44, 1009–1016. [Google Scholar] [CrossRef]
- Betta, G.; Dell’Isola, M.; Liguori, C.; Pietrosanta, A. Expert systems for the detection and isolation of faults on low-accuracy sensor systems. In Proceedings of the IEEE Workshop on Emergent Technologies and Visual Systems for Instrumentation and Measurement (ET&VS-IM/97), Niagara Falls, ON, Canada, 15–17 May 1997. [Google Scholar]
- Zidani, F.; Diallo, D.; Benbouzid, M.; Nait-Said, R. A fuzzy-based approach for the diagnosis of fault modes in a voltage-fed PWM inverter Induction motor drive. IEEE Trans. Ind. Electron. 2008, 55, 586–593. [Google Scholar] [CrossRef]
- Nan, C.; Khan, F.; Iqba, M. Real-time fault diagnosis using knowledge-based expert system. Process Saf. Environ. Protect. 2008, 86, 55–71. [Google Scholar] [CrossRef]
- Lind, A.O.; Wiyasekara, D.; Manic, M.; Rieger, C. FN-DFE: Fuzzy neural data fusion engine for enhanced resilient state-awareness of hybrid energy systems. IEEE Trans. Cybern. 2014, 44, 2065–2075. [Google Scholar]
- Adouni, A.; Hamed, M.B.; Flah, A.; Sbita, L. Sensor and actuator fault detection and isolation based on artificial neural networks and fuzzy logic applicated on Induction motor. In Proceedings of the International Conference on Control, Decision and Information Technologies CoDIT, Hammamet, Tunisia, 6–8 May 2013. [Google Scholar]
- Ma, M.; Wong, D.; Jang, S.; Tseng, S. Fault detection based on statistical multivariate analysis and microarray visualization. IEEE Trans. Ind. Inf. 2010, 6, 18–24. [Google Scholar]
- Orlowska-Kowalska, T.; Dybkowski, M. Stator-Current-Based MRAS Estimator for a Wide Range Speed-Sensorless Induction-Motor Drive. IEEE Trans. Ind. Electron. 2010, 57, 1296–1308. [Google Scholar] [CrossRef]
- Nan, C.; Khan, F.; Iqbal, M.T. Abnormal process condition prediction (fault diagnosis) using G2 expert system. In Proceedings of the 2007 Canadian Conference on Electrical and Computer Engineering, Vancouver, BC, Canada, 22–26 April 2007; pp. 1507–1510. [Google Scholar]
- Mostafa, S.; Ahmad, M.; Mohammed, M.; Obaid, O. Implementing an expert diagnostic assistance system for car failure and malfunction. IJCSI Int. J. Comput. Sci. Issues 2012, 9, 1–7. [Google Scholar]
- Yu, Y.; Zhao, Y.; Wang, B.; Huang, X.; Xu, D. Current sensor fault diagnosis and tolerant control for VSI-based induction motor drives. IEEE Trans. Power Electron. 2018, 33, 4238–4248. [Google Scholar] [CrossRef]
- Zorgani, Y.A.; Jouili, M.; Koubaa, Y.; Boussak, M. A Very-Low-Speed Sensorless Control Induction Motor Drive with Online Rotor Resistance Tuning by Using MRAS Scheme. Power Electron. Drives 2018, 3, 171–186. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Korzonek, M.; Tarchała, G. Stability Analysis of Selected Speed Estimators for Induction Motor Drive in Regenerating Mode—A Comparative Study. IEEE Trans. Ind. Electron. 2017, 64, 7721–7730. [Google Scholar] [CrossRef]
- Klimkowski, K.; Dybkowski, M. Neural network approach for stator current sensor fault detection and isolation for vector controlled induction motor drive. In Proceedings of the 2016 IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, Bulgaria, 25–28 September 2016. [Google Scholar]
- Manohar, M.; Das, S. Current sensor fault-tolerant control for direct torque control of induction motor drive using flux-linkage observer. IEEE Trans. Ind. Inf. 2017, 13, 2824–2833. [Google Scholar] [CrossRef]
- Lee, K.S.; Ryu, J.S. Instrument fault detection and compensation scheme for direct torque controlled induction motor drives. IEE Proc. Control Theory Appl. 2003, 150, 376–382. [Google Scholar] [CrossRef]
- Klimkowski, K.; Dybkowski, M. A fault tolerant control structure for an induction motor drive system. Automatika J. Control Meas. Electron. Comput. Commun. 2016, 57, 638–647. [Google Scholar] [CrossRef]
- Klimkowski, K.; Dybkowski, M.; Bednarz, S.Z. Influence of stator and rotor resistances changes to the properties of the Fault Tolerant Vector Control of induction motor drive. In Proceedings of the 2017 International Symposium on Electrical Machines (SME), Nałęczów, Poland, 18–21 June 2017; pp. 1–5. [Google Scholar]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C. Closed-loop control impact on the diagnosis of induction motors faults. IEEE Trans. Ind. Appl. 2000, 36, 1318–1329. [Google Scholar] [CrossRef]
- Cruz, S.M.; Cardoso, A.J.M. Diagnosis of stator inter-turn short circuits in DTC induction motor drives. IEEE Trans. Ind. Appl. 2004, 40, 1349–1360. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of the Fault | Current Value |
|---|---|
| Variable gain | |
| Phase shift | |
| Signal limit | |
| Noise | |
| Lack of signal | |
| Intermittent signal |
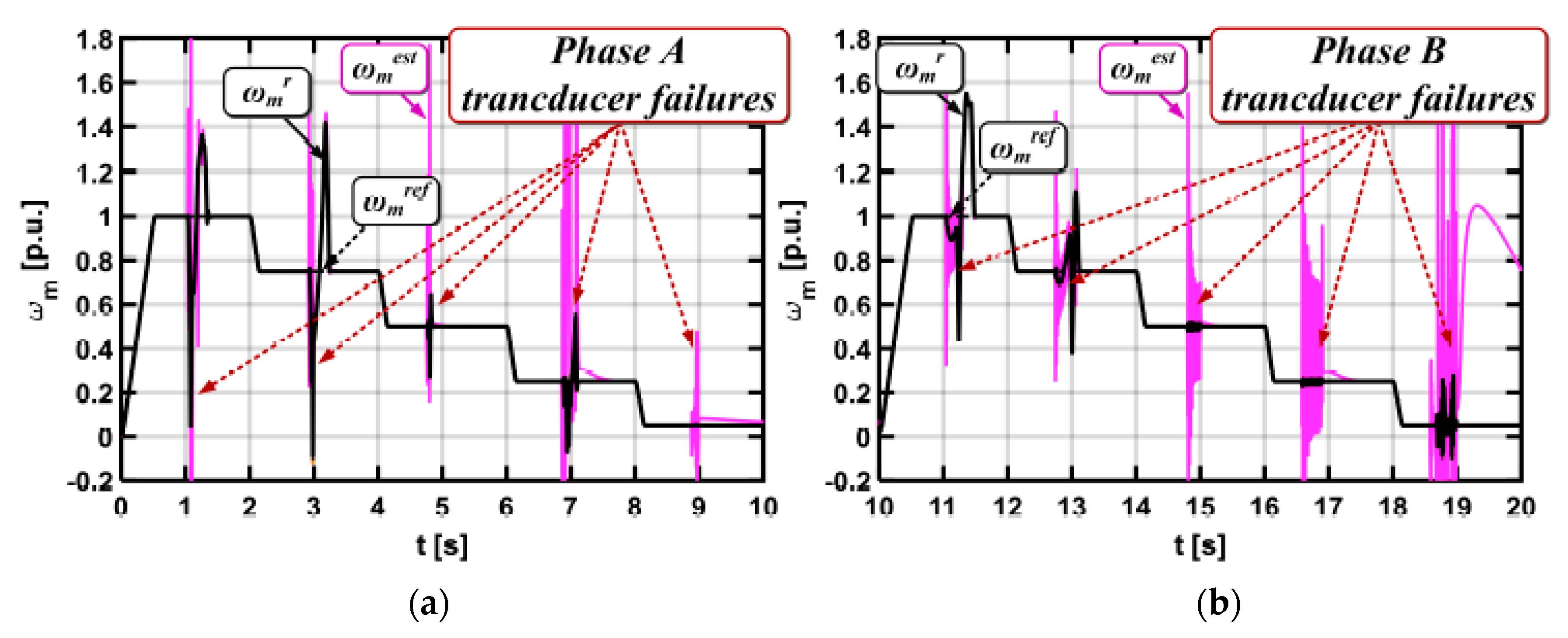
| Type of Operation—Experimental Results (Phase A) | ||||
|---|---|---|---|---|
| Fault type | ωm = ωmN mo = moN | ωm = 0.05ωmN | ωm = 1.25ωmN | ωm = ωmN, mo = moN (reverse) |
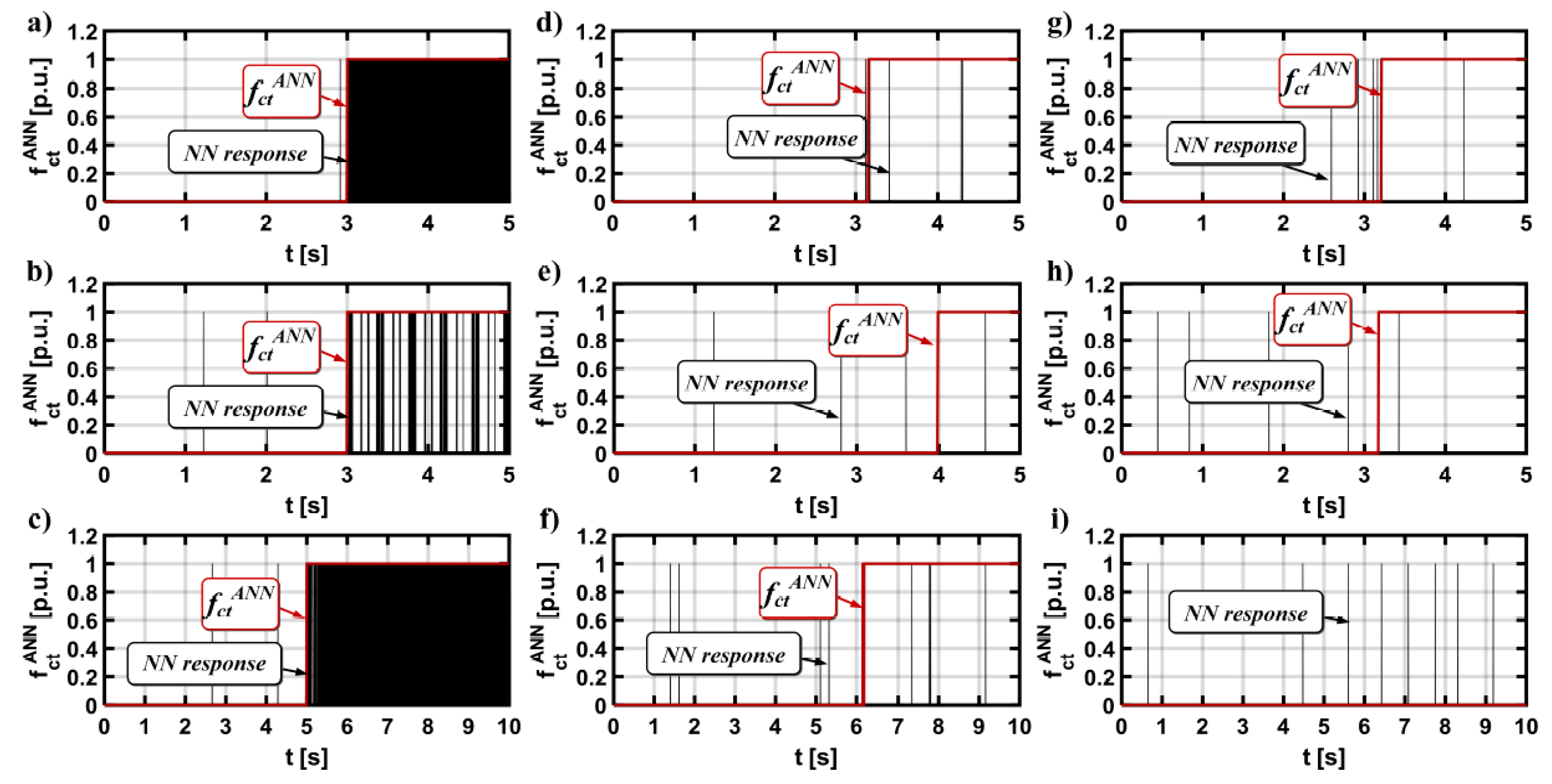
| Total failure | 0.8 ms | 0.6 ms | 0.4 ms | 0.6 ms |
| White noise | 210.6 ms | 175.1 ms | 1.45 s | 1.16 s |
| Gain change | 143.7 ms | 987.2 ms | ND | ND |
| Type of Operation—Experimental Results (Phase B) | ||||
|---|---|---|---|---|
| Fault type | ωm = ωmN mo = moN | ωm = 0.05ωmN | ωm = 1.25ωmN | ωm = ωmN, mo = moN (reverse) |
| Total failure | 0.2 ms | 8.0 ms | 3.0 ms | 0.8 ms |
| White noise | 320.1 ms | 1.34 s | 214.0 ms | 2.03 s |
| Gain change | 127.1 ms | ND | 252.0 ms | 342.0 ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dybkowski, M.; Klimkowski, K. Artificial Neural Network Application for Current Sensors Fault Detection in the Vector Controlled Induction Motor Drive. Sensors 2019, 19, 571. https://doi.org/10.3390/s19030571
Dybkowski M, Klimkowski K. Artificial Neural Network Application for Current Sensors Fault Detection in the Vector Controlled Induction Motor Drive. Sensors. 2019; 19(3):571. https://doi.org/10.3390/s19030571
Chicago/Turabian StyleDybkowski, Mateusz, and Kamil Klimkowski. 2019. "Artificial Neural Network Application for Current Sensors Fault Detection in the Vector Controlled Induction Motor Drive" Sensors 19, no. 3: 571. https://doi.org/10.3390/s19030571