Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control



Abstract
:1. Introduction
- Direction Cosine Matrix (DCM): nine-parameter matrix representation subject to orthogonal constraint, non-singular;
- Principal axis and angle: three-parameter representation (the axis is a unit vector), singular (axis undefined when the angle is zero);
- Euler–Rodrigues parameters (quaternion): four-parameter vector representation subject to unit norm, non-singular;
- Rodrigues parameters (RP; Gibbs vector): three-parameter representation, singular (infinite values for rotations);
- Modified Rodrigues parameters (MRP): three-parameter representation; and
- Cayley–Klein parameters: complex matrix representation subject to unitary constraint.
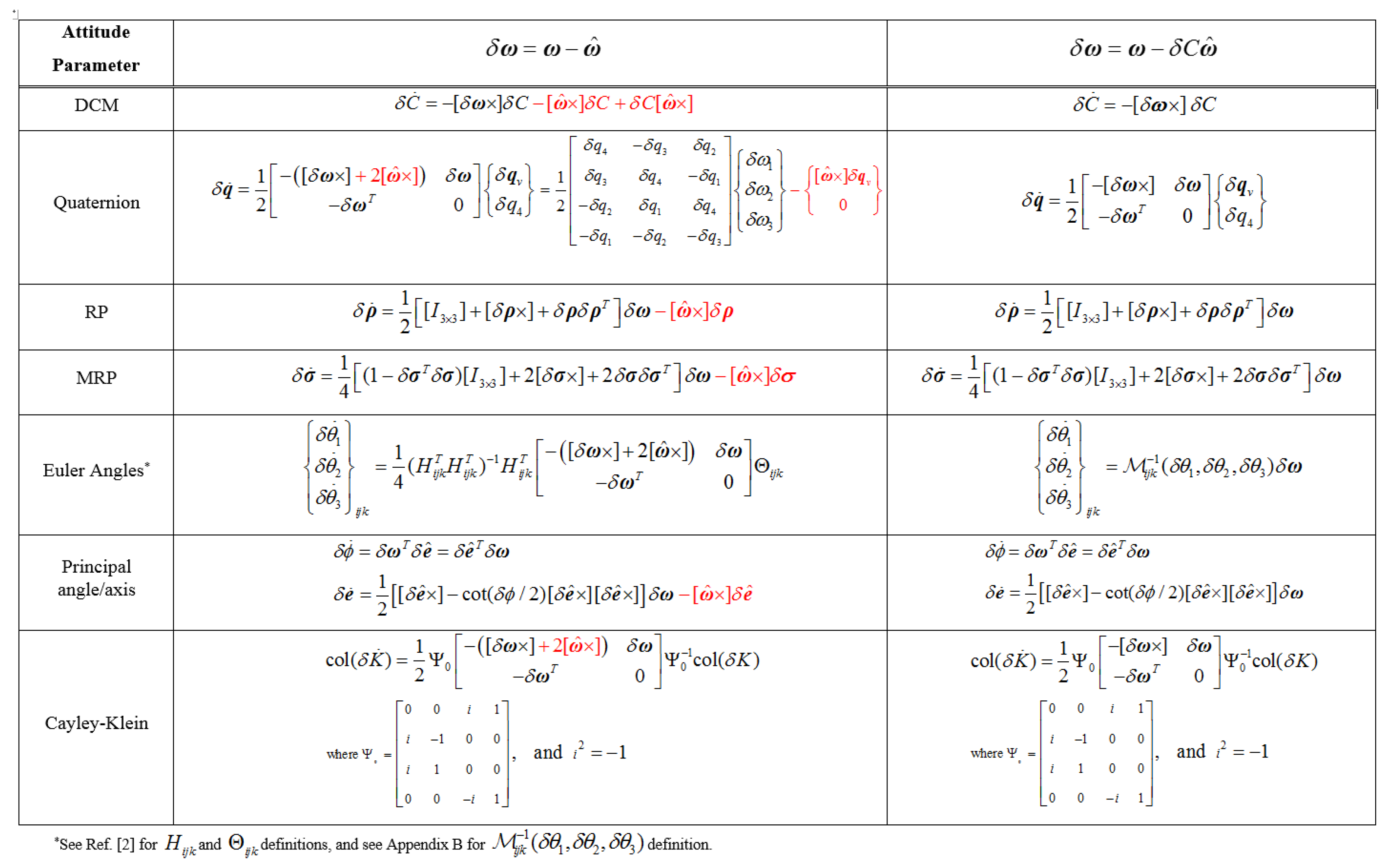
2. Attitude Error Kinematics
- (1)
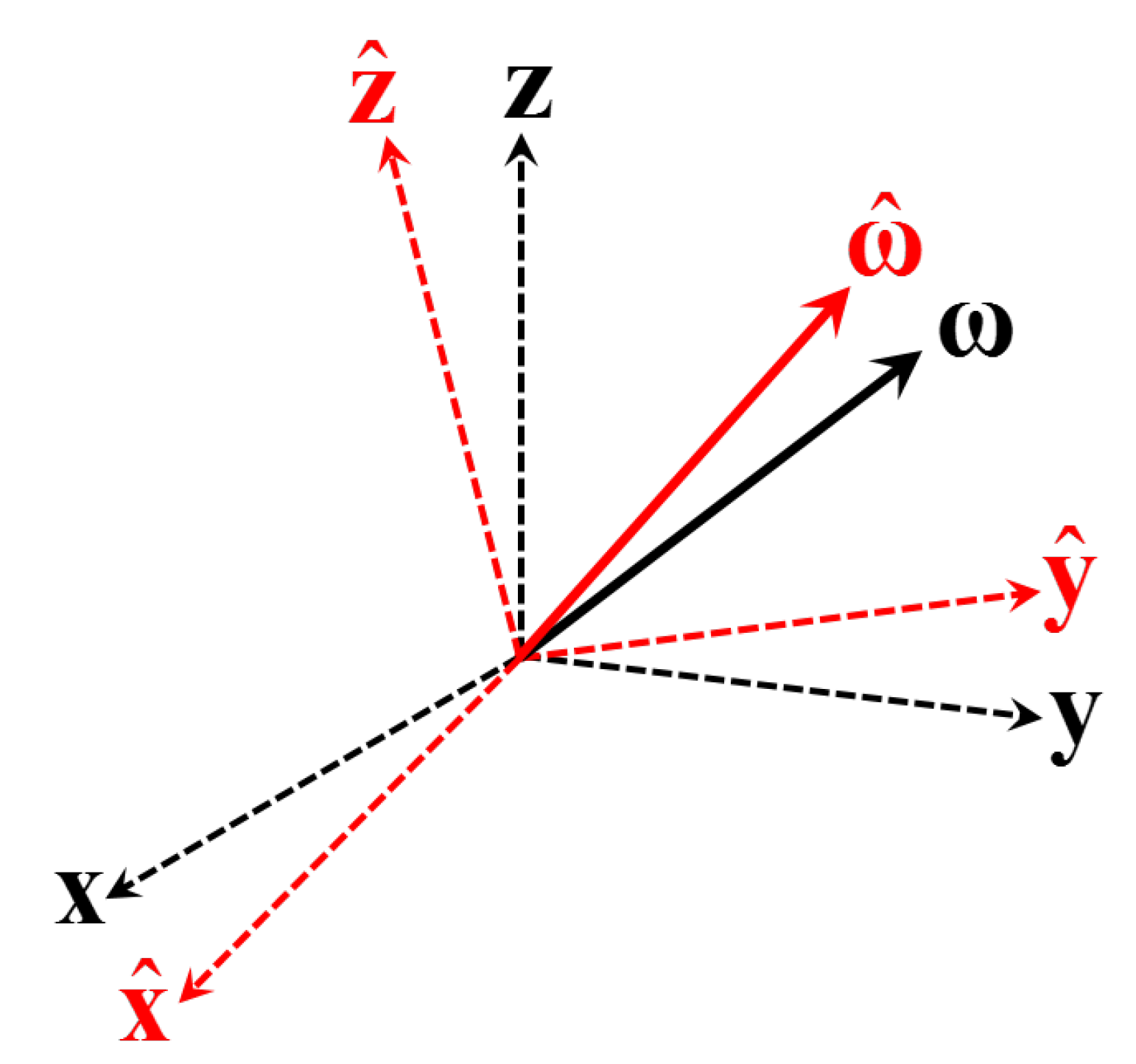
- The estimated is defined in the true body axes frame (). In this case, and are defined in the same reference frame. Therefore, the angular velocity error vector is as follows:This case finds application in simulations when the true attitude is known.
- (2)
- The estimated is defined in the estimated body axes frame (). In this case, and are defined in two different reference frames. Therefore, the angular velocity error vector is as follows:where is provided by Equation (1). This case is important in real applications as the true attitude is always unknown and the estimated angular velocity can be defined in the estimated attitude frame only.
2.1. Simulation Case: Estimated Angular Velocity Given in the True Attitude Frame
2.1.1. Quaternion Error Kinematics
2.1.2. Rodrigues Parameter Error Kinematics
2.1.3. Modified Rodrigues Parameter Error Kinematics
2.1.4. Euler Angles Error Kinematics
2.1.5. Principal Axis and Angle Error Kinematics
2.1.6. Direction Cosine Matrix Error Kinematics
2.1.7. Cayley–Klein Error Parameters Kinematics
2.2. Estimation/Control Case: Angular Velocity Estimated in the Estimated Attitude Frame
2.2.1. Direction Cosine Matrix Error Kinematics
2.2.2. Quaternion Error Kinematics
2.2.3. Rodrigues Parameter Error Kinematics
2.2.4. Modified Rodrigues Parameter Error Kinematics
2.2.5. Euler Angles Error Kinematics
2.2.6. Principal Axis and Angle Error Kinematics
2.2.7. Cayley–Klein Error Parameters Kinematics
2.3. Numerical Validation
- Integrate the true attitude kinematics for each attitude representation using the attitude kinematics equations;
- Transform the time history solution of the true attitude for each attitude representation to the direction cosine matrix C or quaternion ;
- Integrate the estimated attitude kinematics for each attitude representation using the attitude kinematics equations;
- Transform the time history solution of the estimated attitude for each attitude representation to the direction cosine matrix or quaternion ;
- Calculate the attitude error of the two solutions in steps 2 and 4 using or ; then, calculate the principal angle of the attitude error, ;
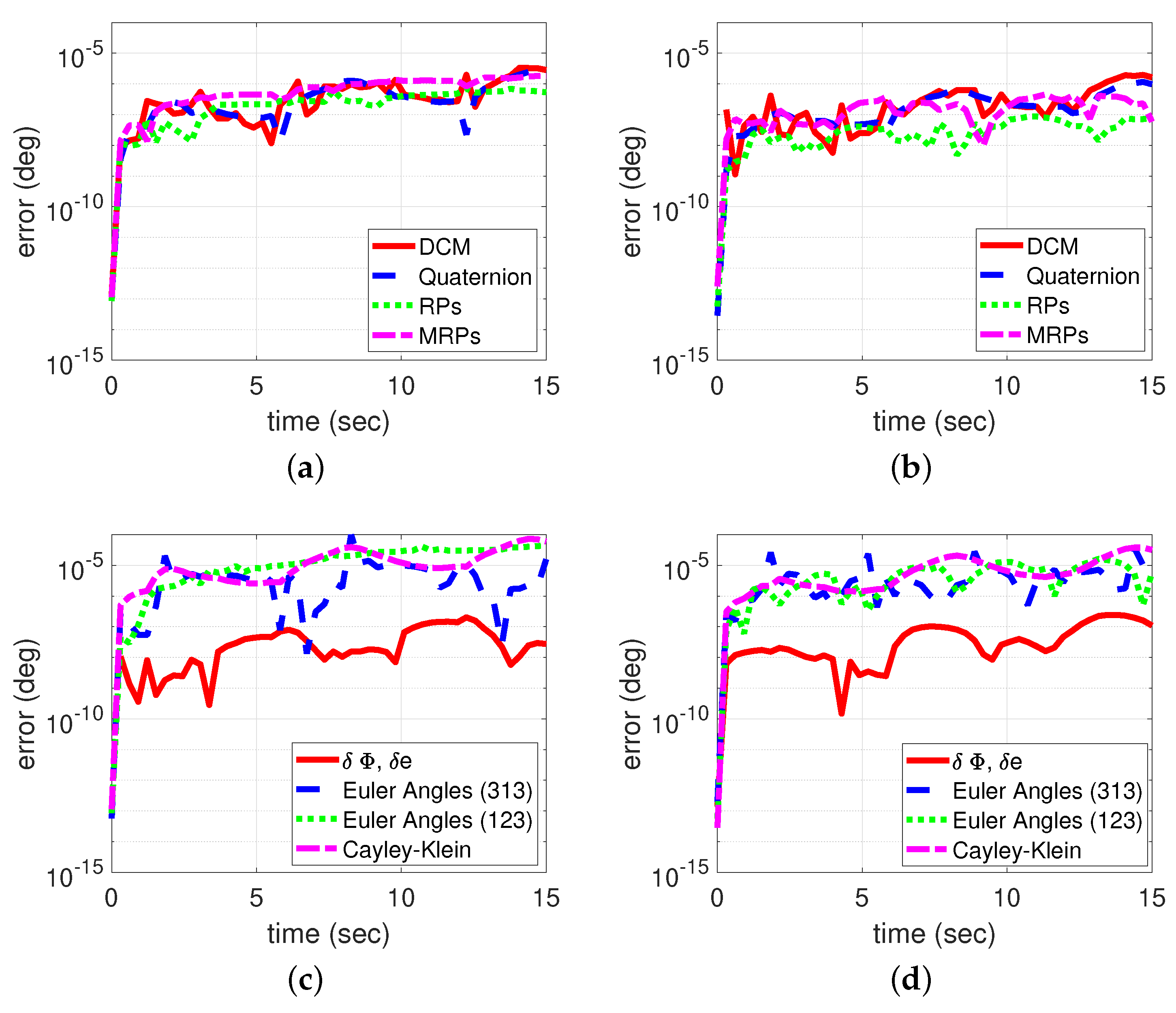
- For approaches 1 and 2, integrate the attitude error kinematics for each attitude representation using the attitude error kinematics equations in Appendix B (Table Figure A1); then, calculate the principal angle of the attitude error for each approach;
- Calculate the absolute error , as shown in Figure 2.
3. Kalman Filter
3.1. Estimated Angular Velocity Defined in the True Attitude Frame
3.2. Estimated Angular Velocity Defined in the Estimated Attitude Frame
3.3. Extended Kalman Filter Error Model
- Initialization: at and for given initial states and initial value of the covariance matrix , the initial values are given by the following:where the superscript (−) denotes priori values and is the expectation operator. Assume that .
- Update: update the state estimate and covariance at each measurement:where the superscript (+) denotes posteriori values.
- Propagation: propagate both the state estimate and covariance using the posteriori estimate and posteriori covariance . The estimated angular velocity, , is used to propagate the quaternion kinematics:where the matrices F, G, and Q are given by Table 2.
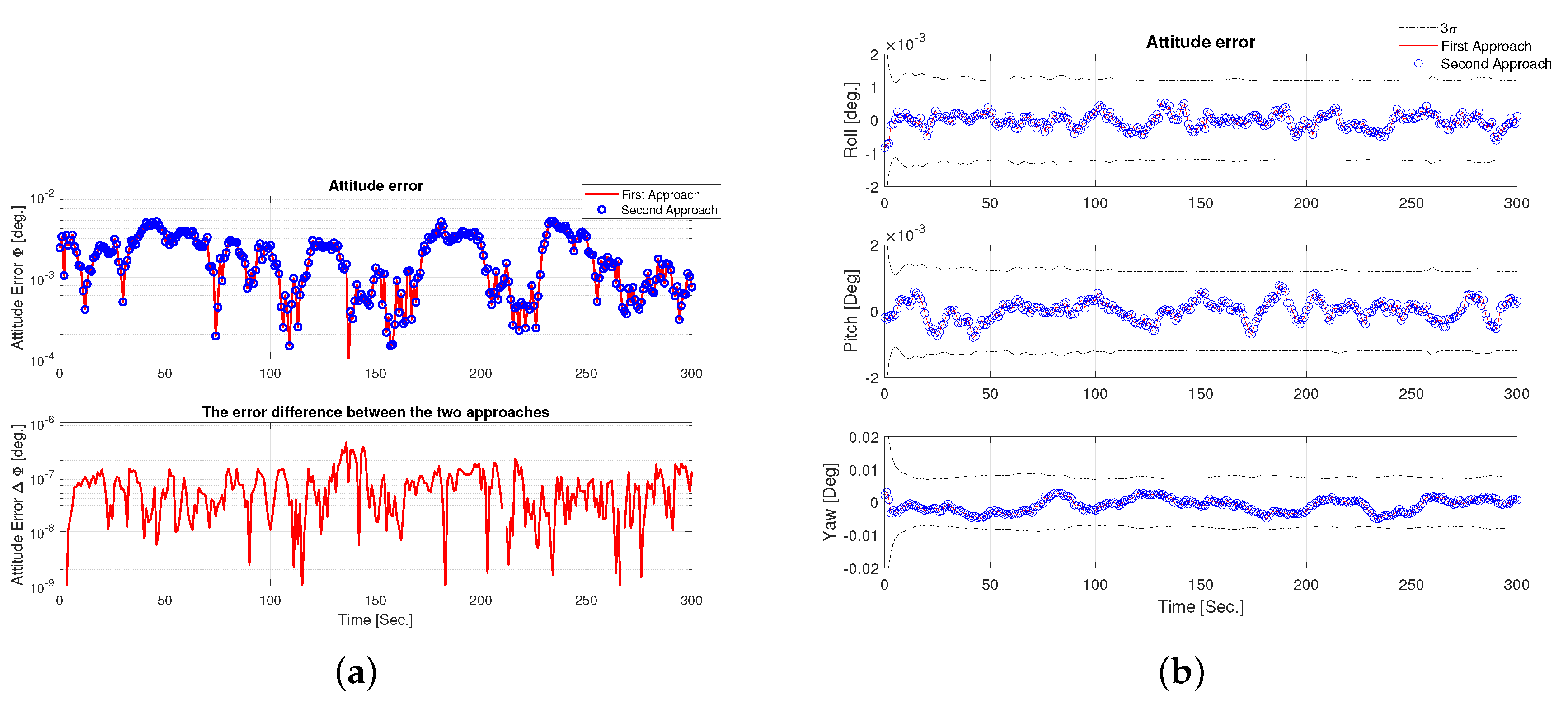
3.4. Numerical Simulation
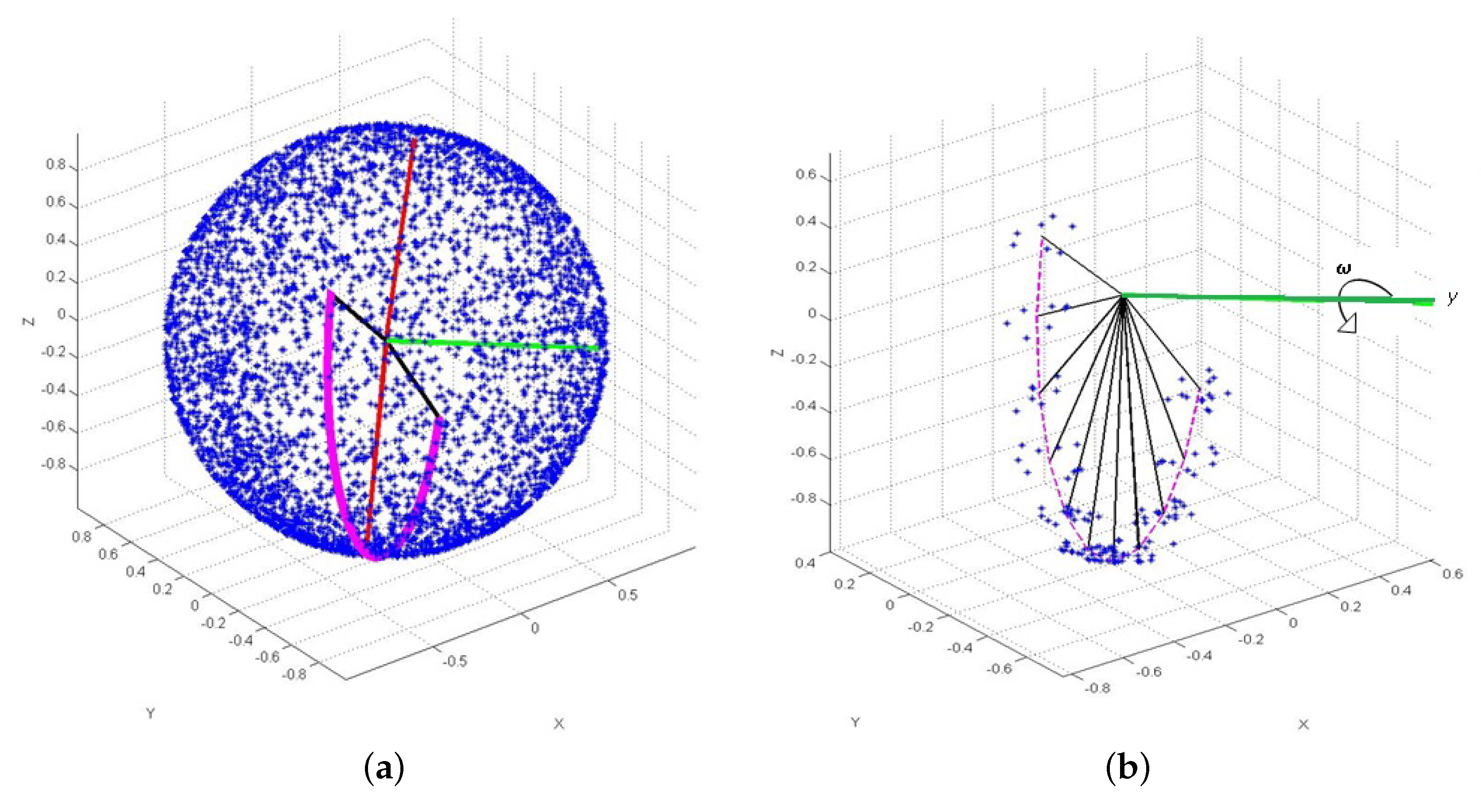
- Optical axis aligned with axis of the body reference frame.
- Sensor field of view: .
- Star catalog with magnitude threshold = 6.
- Observed stars affected by multiplicative Gaussian noise [32] due to centroid error, .
- spacecraft is spinning about the axis with constant angular velocity 1.01 rad/s.
- Simulation time is 300 s with sampling frequency of 10 Hz.
4. Optimal Tracking Control
4.1. Reference Angular Velocity Defined in the Body Attitude Frame
4.2. Reference Angular Velocity Defined in the Reference Attitude Frame
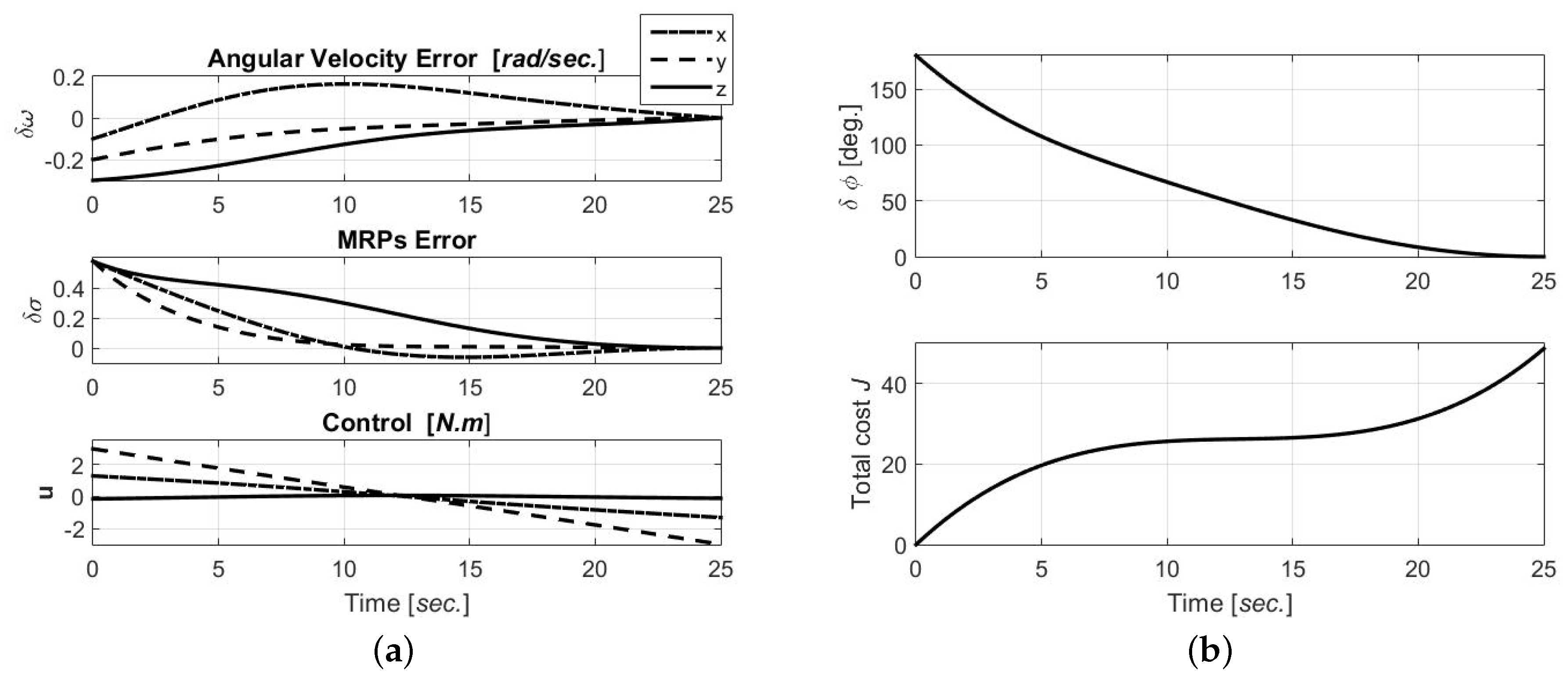
4.3. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Angular Velocity Error Vector and Euler Angle Error Rates Mapping

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i-j-k | i-j-k | ||||
|---|---|---|---|---|---|
| 1-2-1 | 2-3-1 | ||||
| 1-2-3 | 2-3-2 | ||||
| 1-3-1 | 3-1-2 | ||||
| 1-3-2 | 3-1-3 | ||||
| 2-1-2 | 3-2-1 | ||||
| 2-1-3 | 3-2-3 | ||||
Appendix B. Attitude Error Kinematics

References
- Shuster, M.D. A Survey of Attitude Representations. J. Astronaut. Sci. 1993, 41, 439–517. [Google Scholar]
- Mortari, D. The Attitude Error Estimator. In Proceedings of the International Conference on Dynamics and Control of Systems and Structures in Space, Cambridge, UK, 14–18 July 2002. [Google Scholar]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Space Technology Library, Springer: New York, NY, USA, 2014. [Google Scholar]
- Hughes, P.C. Spacecraft Attitude Dynamics; J. Wiley: Hobken, NJ, USA, 1986; Chapter 1. [Google Scholar]
- Goldstein, H. Classical Mechanics, 2nd ed.; Addison-Wesley, Addison-Wesley Publishing Company: Reading, MA, USA, 1980; Chapter 4. [Google Scholar]
- Junkins, J.L.; Turner, J.D. Optimal Spacecraft Rotational Maneuvers; Studies in Astronautics; Elsevier: Amsterdam, The Netherlands, 1986; Chapter 3. [Google Scholar]
- Junkins, J.L.; Singla, P. How Nonlinear Is It? A Tutorial on Nonlinearity of Orbit and Attitude Dynamics. J. Astronaut. Sci. 2004, 52, 7–60. [Google Scholar]
- Markley, F.L. Attitude Error Representations for Kalman Filtering. J. Guid. Control Dyn. 2003, 26, 311–317. [Google Scholar] [CrossRef]
- Van Der Ha, J.; Shuster, M. A Tutorial on Vectors and Attitude. IEEE Control Syst. 2009, 29, 94–107. [Google Scholar] [CrossRef]
- Schaub, H.; Junkins, J.L. Analytical Mechanics of Space Systems; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2003; Chapter 3. [Google Scholar]
- Wiener, T. Theoretical Analysis of Gimballess Inertial Reference Equipment Using Delta-Modulated Instruments. Ph.D. Thesis, Department of Aeronautical and Astronautical Engineering, MIT, Cambridge, MA, USA, 1962. [Google Scholar]
- Marandi, S.; Modi, V. A Preferred Coordinate System and the Associated Orientation Representation in Attitude Dynamics. Acta Astronaut. 1987, 15, 833–843. [Google Scholar] [CrossRef]
- Modi, V. Spacecraft Attitude Dynamics: Evolution and Current Challenges. Acta Astronaut. 1990, 21, 689–718. [Google Scholar] [CrossRef]
- Cao, L.; Chen, X.; Misra, A.K. A Novel Unscented Predictive Filter for Relative Position and Attitude Estimation of Satellite Formation. Acta Astronaut. 2015, 112, 140–157. [Google Scholar] [CrossRef]
- Cao, L.; Qiao, D.; Chen, X. Laplace ℓ1 Huber Based Cubature Kalman Filter for Attitude Estimation of Small Satellite. Acta Astronaut. 2018, 148, 48–56. [Google Scholar] [CrossRef]
- Bach, R.; Paielli, R. Linearization of Attitude-Control Error Dynamics. IEEE Trans. Autom. Control 1993, 38, 1521–1525. [Google Scholar] [CrossRef]
- Sun, L.; Huo, W.; Jiao, Z. Disturbance-Observer-Based Robust Relative Pose Control for Spacecraft Rendezvous and Proximity Operations Under Input Saturation. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1605–1617. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Vadali, S.R.; Markley, F.L. Optimal Variable-Structure Control Tracking of Spacecraft Maneuvers. J. Guid. Control Dyn. 2000, 23, 564–566. [Google Scholar] [CrossRef]
- Ahmed, J.; Coppola, V.T.; Bernstein, D.S. Adaptive Asymptotic Tracking of Spacecraft Attitude Motion with Inertia Matrix Identification. J. Guid. Control Dyn. 1998, 21, 311–321. [Google Scholar] [CrossRef]
- Younes, A.B.; Turner, J.D.; Majji, M.; Junkins, J.L. An Investigation of State Feedback Gain Sensitivity Calculations. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Younes, A.B.; Turner, J.D.; Majji, M.; Junkins, J.L. Nonlinear Tracking Control of Maneuvering Rigid Spacecraft. In Proceedings of the 21st AAS/AAS Space Flight Mechanics Meeting, New Orleans, LA, USA, 13–17 February 2011. [Google Scholar]
- Sharma, R.; Tewari, A. Optimal Nonlinear Tracking of Spacecraft Attitude Maneuvers. IEEE Trans. Control Syst. Technol. 2004, 12, 677–682. [Google Scholar] [CrossRef]
- Schaub, H.; Junkins, J.L.; Robinett, R.D. New Penalty Functions and Optimal Control Formulation for Spacecraft Attitude Control Problems. J. Guid. Control Dyn. 1997, 20, 428–434. [Google Scholar] [CrossRef]
- Tanygin, S. Projective Geometry of Attitude Parameterizations with Applications to Control. J. Guid. Control Dyn. 2013, 36, 656–666. [Google Scholar] [CrossRef]
- Tanygin, S. Projective and Differential Geometry of Attitude Errors with Applications to Estimation. J. Guid. Control Dyn. 2013, 36, 1254–1266. [Google Scholar] [CrossRef]
- Junkins, J.L. Adventures on the Interface of Dynamics and Control. J. Guid. Control Dyn.s 1997, 20, 1058–1071. [Google Scholar] [CrossRef]
- Younes, A.B.; Turner, J.D.; Mortari, D.; Junkins, J.L. A Survey Of Attitude Error Representations. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Younes, A.B.; Mortari, D.; Turner, J.D.; Junkins, J.L. Attitude Error Kinematics. J. Guid. Control Dyn. 2014, 37, 330–336. [Google Scholar] [CrossRef]
- Younes, A.B.; Mortari, D. Attitude Error Kinematics: Applications in Control. In Proceedings of the 26th AAS/AIAA Space Flight Mechanics Meeting, Napa, CA, USA, 14–18 February 2016. [Google Scholar]
- Younes, A.B.; Mortari, D. Attitude Error Kinematics: Applications in Estimation. In Proceedings of the 26th AAS/AIAA Space Flight Mechanics Meeting, Napa, CA, USA, 14–18 February 2016. [Google Scholar]
- Crassidis, J.; Junkins, J. Optimal Estimation of Dynamic Systems; Chapman & Hall/CRC Applied Mathematics & Nonlinear Science; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Mortari, D.; Majji, M. Multiplicative Measurement Model. J. Astronaut. Sci. 2009, 57, 47–60. [Google Scholar] [CrossRef]
- Li, F.; Bainum, P.M. A improved Shooting Method for Solving Minimum-Time Maneuver Problems. In Advances in dynamics and control of flexible spacecraft and space-based manipulations. In Proceedings of the ASME, Winter Annual Meeting, Dallas, TX, USA, 25–30 November 1990. [Google Scholar]





| Parameter | Initial Condition |
|---|---|
| (rad/s) | |
| (rad/s) | |
| Attitude Parameter | Penalty Function |
|---|---|
| DCM | |
| Quaternion | |
| CRPs | |
| MRPs | |
| Euler Angles | |
| Principal angle/axis | |
| Cayley-Klein |
| Time (s) | Attitude Error (MRPs) | Angular Velocity Error (rad/s) |
|---|---|---|
| 0 | ||
| 25 |
| 86.215 | |
| 85.070 | |
| 113.565 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bani Younes, A.; Mortari, D. Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control. Sensors 2019, 19, 4682. https://doi.org/10.3390/s19214682
Bani Younes A, Mortari D. Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control. Sensors. 2019; 19(21):4682. https://doi.org/10.3390/s19214682
Chicago/Turabian StyleBani Younes, Ahmad, and Daniele Mortari. 2019. "Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control" Sensors 19, no. 21: 4682. https://doi.org/10.3390/s19214682