Underwater Acoustic Impulsive Noise Monitoring in Port Facilities: Case Study of the Port of Cartagena †

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Location and identification of impulsive noise emission sources.
- Quantification of background levels and continuous noise.
- Quantification of impulsive noise levels.
- Propagation of the values obtained beyond the domain of the port.
2. Identification of Activities Potentially Generating Impulsive Noise in Port Facilities
- Pile driving [18]—installing piles requires the use of a large mechanical hammer to drill the seabed. Sound levels of mechanical driving can reach up to 260 dB re 1 μPa re 1 m in the absence of noise reduction measures. In [18], the impact of sound measurements had a duration of 0.2 s, the signals showed peak energy at 160 Hz, and also had significant energy up to and beyond 100 kHz.
- Compressed air guns [20]—compressed air cannons are commonly used in seismic surveys to determine the geological structures of the seabed. These guns send shots of compressed air towards the seabed. The sound bounces off the bed and returns to the surface, where it is recorded by hydrophones. In [20], a 0.33 L Bolt PAR 600B air gun was used at 1500 psi (5 m depth). In these operating conditions it had a source level of 192 dB re 1 μPa2·s at 1 m.
- Sonar [21]—used especially by naval vessels to detect underwater objects. Simple sonar systems direct sound (short pulses) in one direction, although there are more complex systems that can emit beams of sound in multiple directions. Examples of acoustic characteristic of sound sources of this type include: multi-beam sonar with center frequency 15.5 kHz, sound pressure level (SPL): 237 dB re 1 μPa at 1 m (RMS) with omnidirectional beam; sub-bottom profiler with center frequency 3. 5 kHz, SPL: 204dB re: 1uPa at 1 m (RMS); or AN/SQS 56 sonar with center frequency of 6.8 kHz; 7.5 kHz; 8.2 kHz, SPL: 223 dB re 1 μP at 1 m (RMS) horizontal beam.
- Echosounders [21]—use sound production to locate the depth of the marine environment or schools of fish. They are used on most vessels, on fishing boats, and also on a large number of pleasure craft. For example, the SimradEK 500 Scientific echo sounder has a frequency of 38 kHz, 3 dB beam width 6.9 deg, peak transmit power 2000 W, pulse duration 1 ms and a 3.8 kHz bandwidth.
- Acoustic deterrent devices [22]—are used to alert or frighten away marine animals with sounds to avoid their interfering with fishing gear or aquaculture cages. An example of this type of device is the Ferranti-Thomson MK2 4X, which has a source level (re 1 μPa) of about 200 dB at 25 kHz. Other commercial devices have similar characteristics.
3. Materials and Methods
3.1. Characterization of the Submarine Bottom
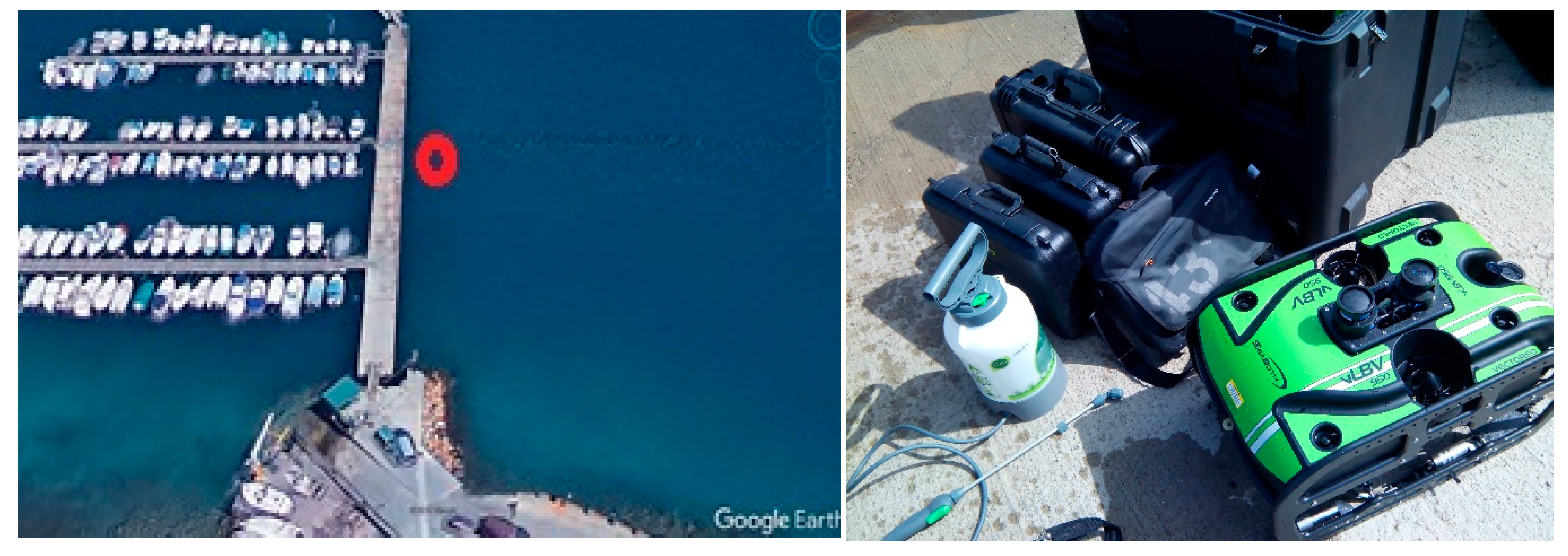
- Visual inspections were made with underwater ROVs (remote operated vehicles) in order to determine the type of seabed in Cartagena Bay. For this, the following vehicles were used: the Deep Trecker DTG2 and Seabotix VLBV950. Figure 1 shows the location of the deployment point inside the port (left) and one of the robots used (right). Photographic and video reports were obtained.
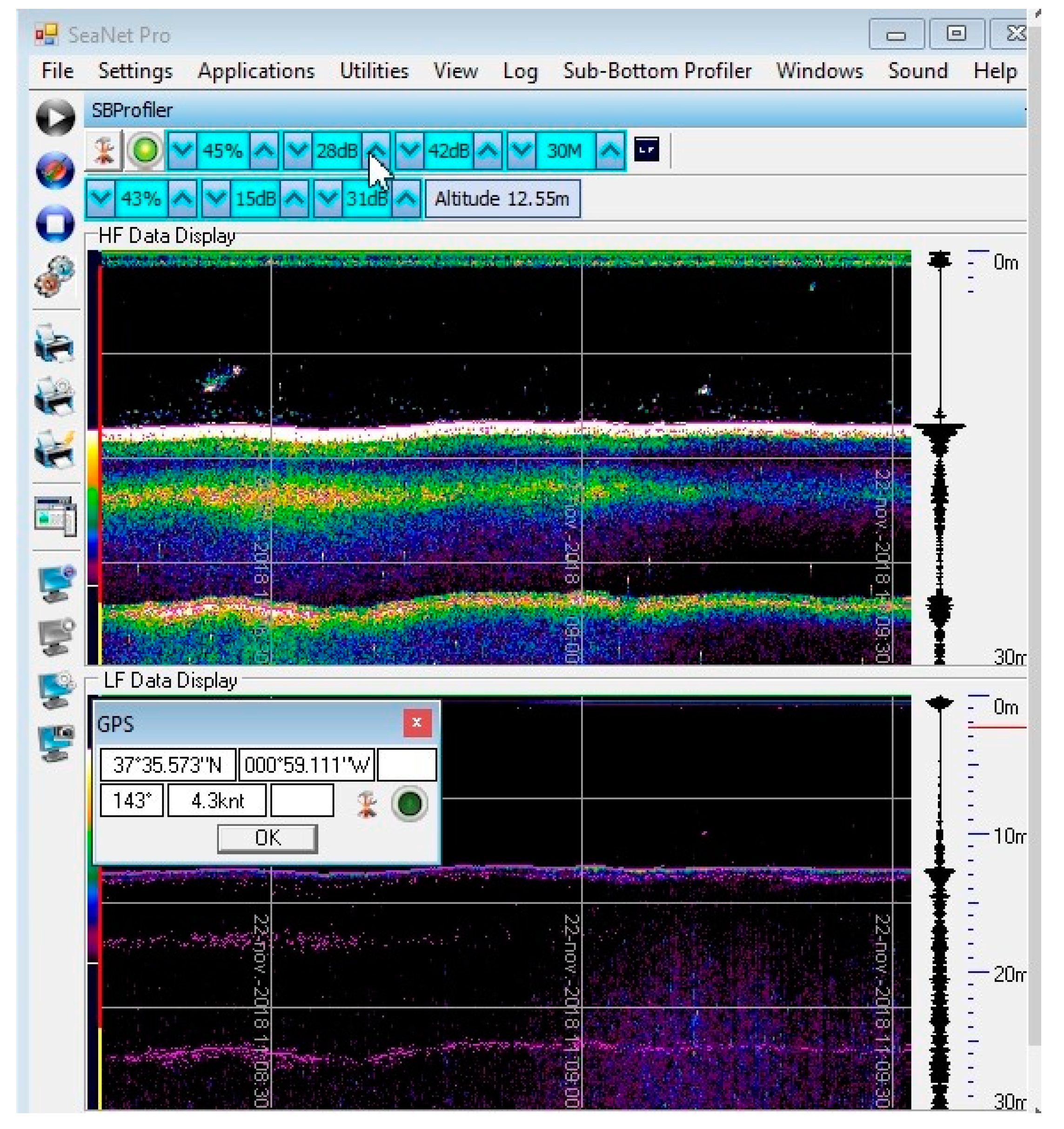
- A bathymetric survey was carried out to profile the seabed by means of an echo sounder using a Seaking SBP (parametric sub-bottom profiler). This sonar emits two frequencies: low frequency 20 kHz (parametric) with a beam width of 4.5º, and high frequency at 200 kHz with a beam width of 4º. The pulse width is 100 μs. When producing a 20 kHz pulse, the device is able to penetrate the seabed and highlight structural differences that conventional echo sounders cannot detect.
3.2. Characterization of Underwater Noise
- -
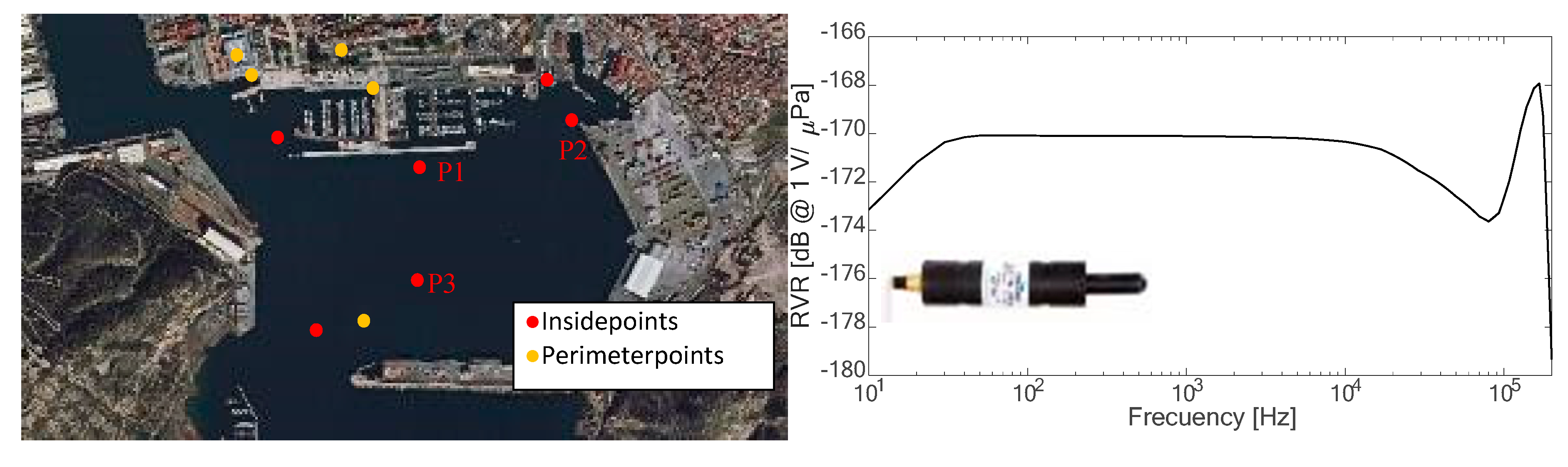
- Type 1: Recordings at different points around the port perimeter by manual deployment of a hydrophone.
- -
- Type 2: Recordings in the interior of the port as well as in the access zone outside the port infrastructure by submerging a hydrophone from a boat.
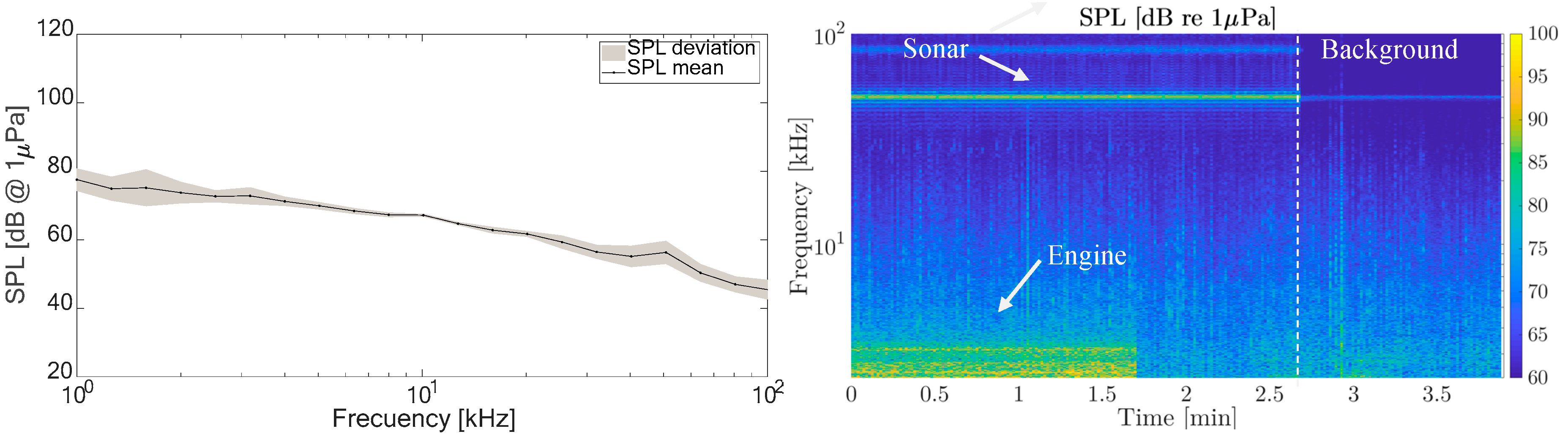
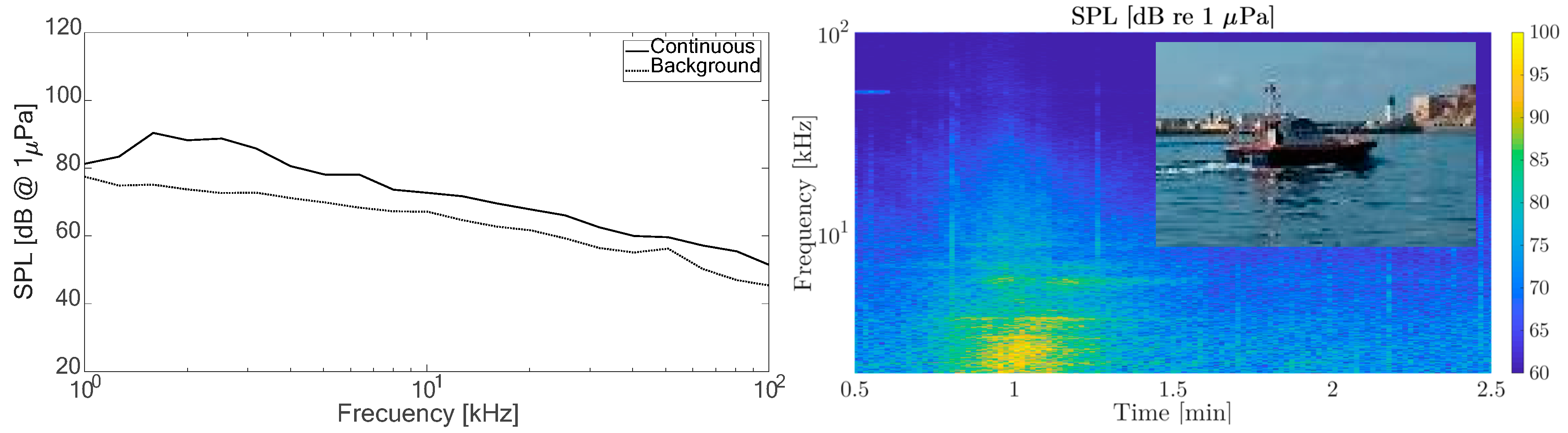
- Continuous sound—different types of boats passing close to the measurement points to be contrasted with the background noise. These recordings helped us to characterize the sources of continuous noise with levels above that of the background noise.
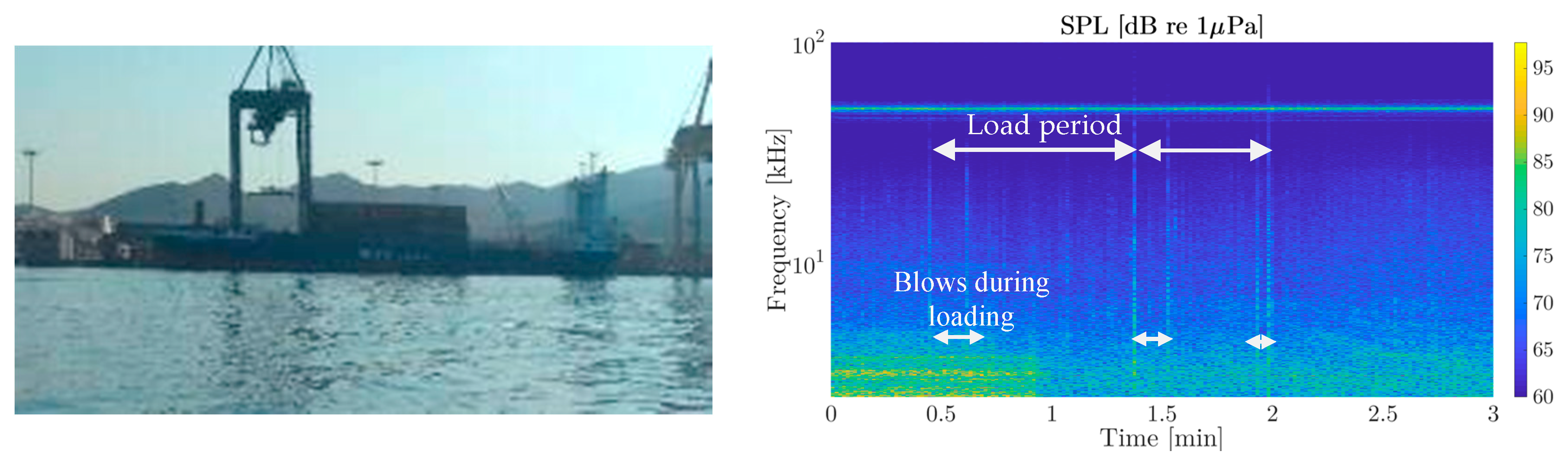
- Impulsive sound—due to boat sonars and especially to loading containers onto cargo ships. An initial estimate of potential impulsive noise inherent to the activity in the port was made from the spectrum, duration, and periodicity of these events. The recorded levels were also the basis for the further development of the numerical propagation model.
3.3. Processing of Undewater Noise
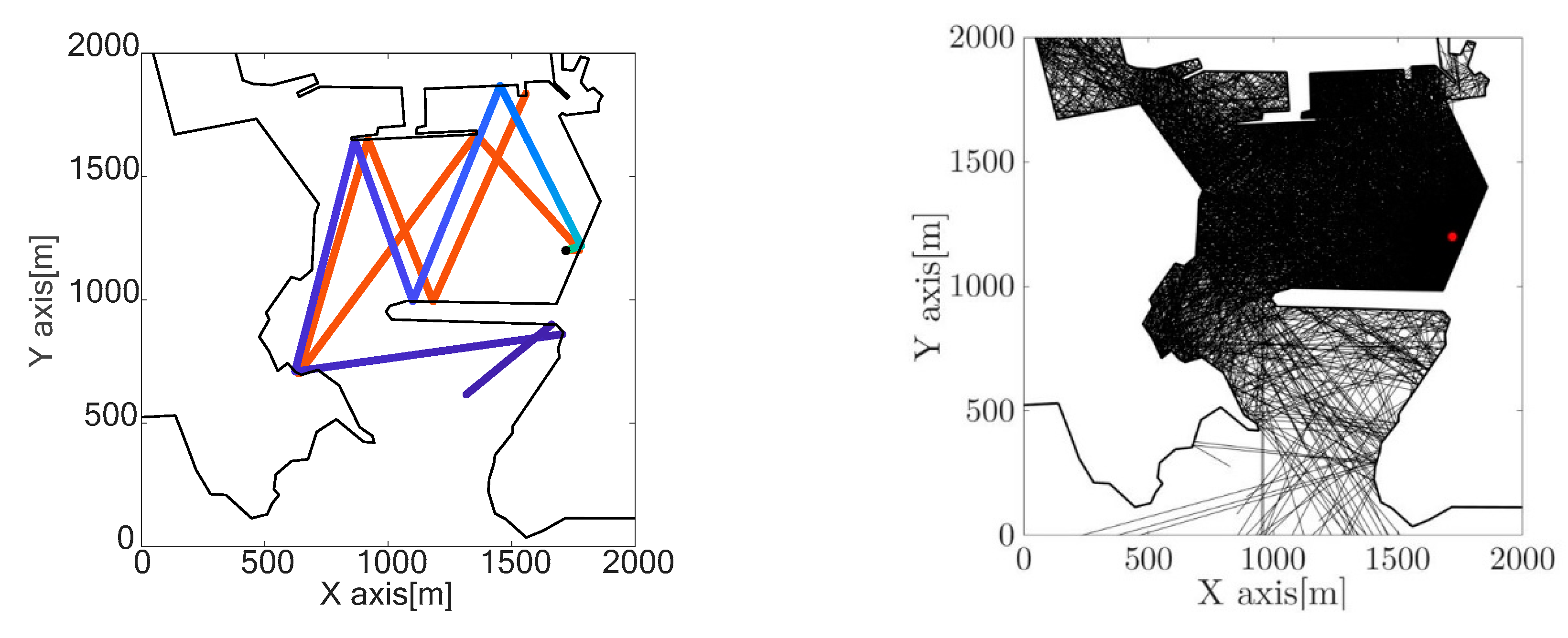
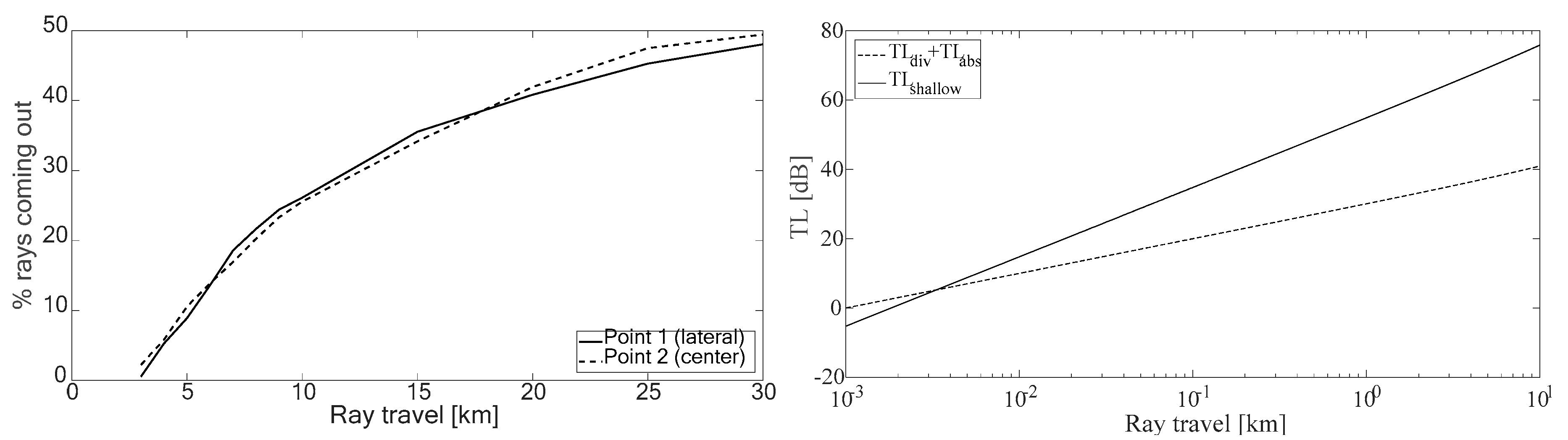
3.4. Underwater Sound Propagation Model
4. Results and Discussion
4.1. The Submarine Seabed
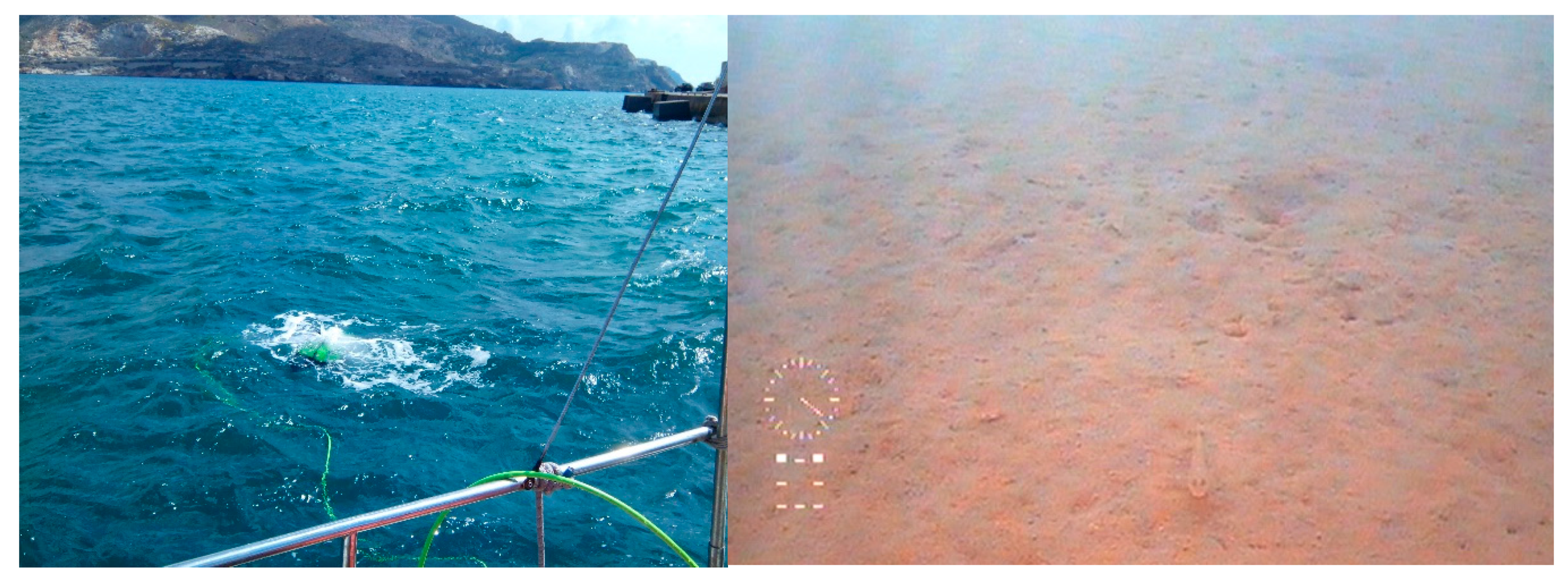
- Visual inspections by an underwater ROV to obtain photographic and video reports. Figure 5 shows the robot deployed from the boat (left) and an image of the bottom at a depth of 9 m (right). The bottom was found to be soft (composed of sand, mud, small stones, and gravel) and shelved slightly with a distance from the jetty.
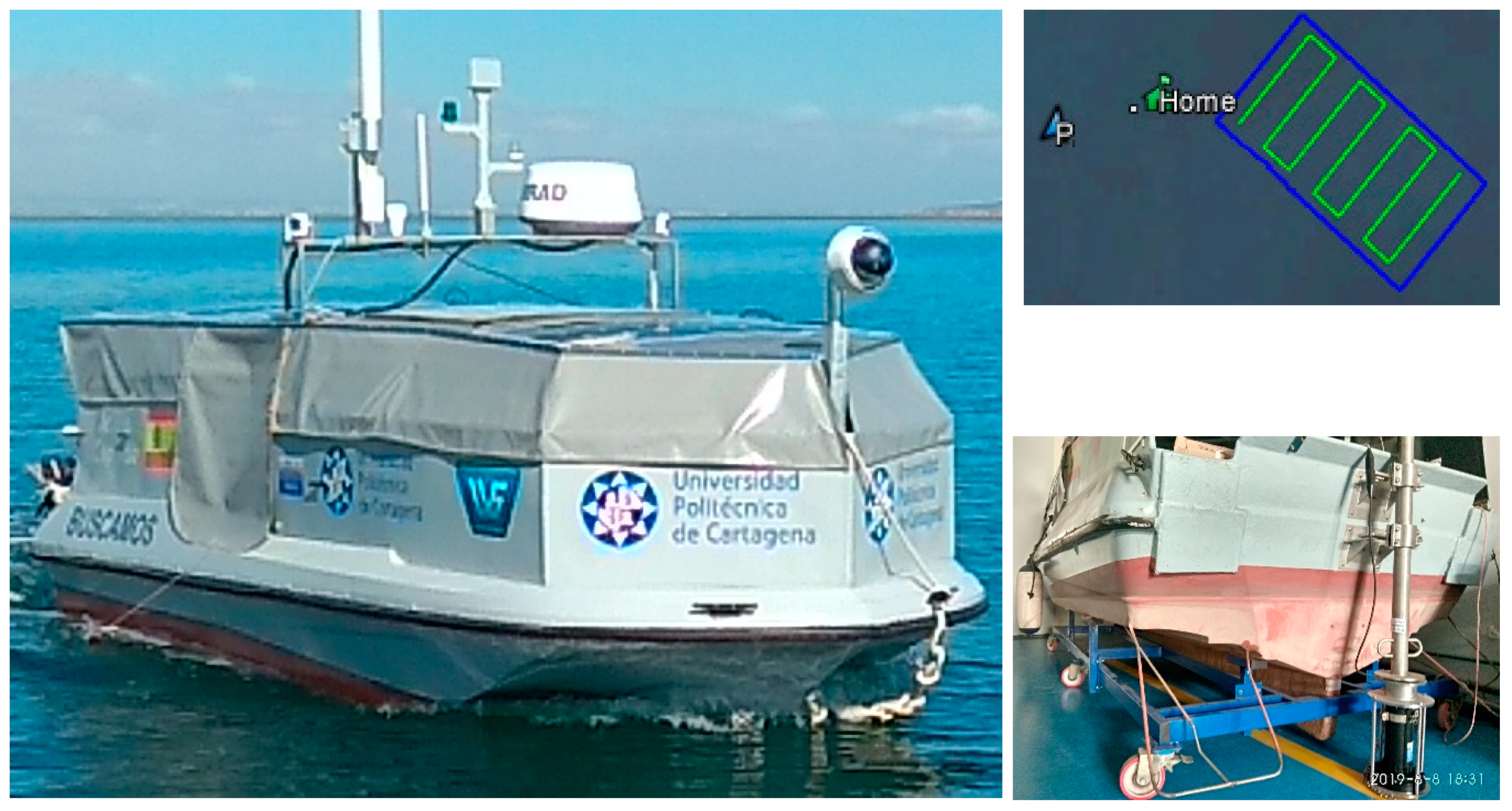
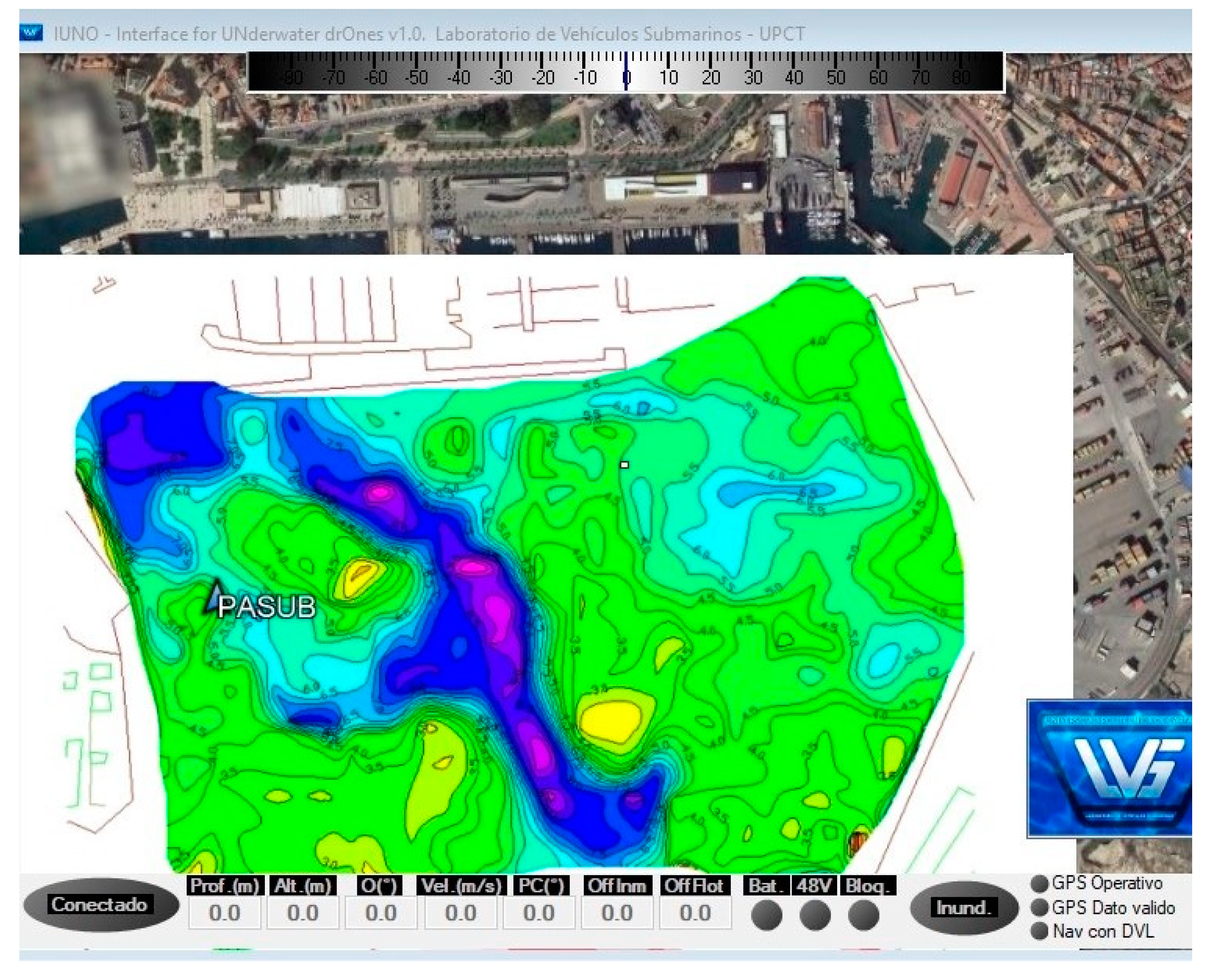
- A bathymetric survey, which obtained information on the depth and types of material below the seabed, plus an updated isopach map, was carried out by a sub-bottom profiler (SBP) coupled to the stern of an ASV. The autonomous vessel was programmed to cover Cartagena Bay following parallel paths. Figure 6 shows the ASV’s control, communication, and command software, which included an initial isopach layer of the bay provided by the Cartagena Port Authority.
4.2. Continuous Acoustic Sound
4.3. Impulsive Sounds
4.4. Propagation of Underwater Noise
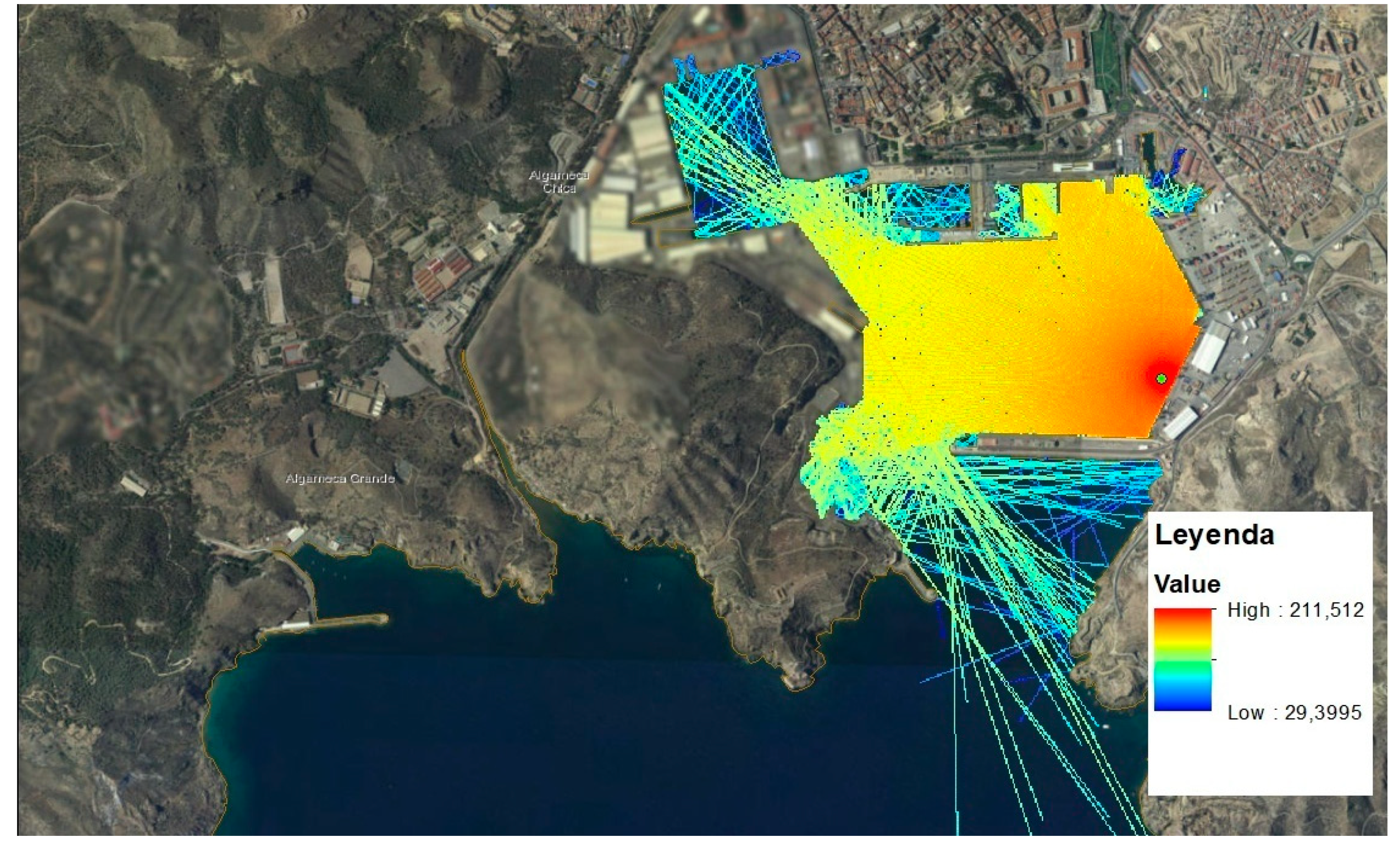
5. Geomaritime Representation of the Results
6. Conclusions
- After analyzing the background and continuous sound levels in the Port of Cartagena, it was found that impulsive sound must have a level above approximately 70 dB re 1 µPa to be detected, depending on the frequency (between 80 and 45 dB re 1 µPa in the frequency range from 10 to 100 kHz, respectively). Only one impulsive sound source was detected, and this was due to container loading operations on the east side of the port. Although this source is not usually indicated in the search for impulsive sources, these operations can be considered as a potentially impulsive noise generating activity, according to the requirements of the Marine Strategy Framework Directive.
- The analysis of the bathymetric survey of the study area was fundamental in the application of acoustic propagation models, as the type of seabed influenced the intensity of the sound, due to the reflections of the waves. Also, having reliable bathymetric information contributed to the construction of a consistent acoustic propagation model, as the accuracy of the data will also affect the accuracy of the model.
- The application of the acoustic propagation model implemented in this study, despite being approximate, provided information on the potential impact produced by the generation of impulsive noise in the vicinity of the Port of Cartagena.
- Measurements of impulsive sound, in accordance with the requirements of the Marine Strategy Framework Directive, which will serve to form part of the port’s underwater sound record.
- Updated and accurate data on the bathymetry of the port that can be used in subsequent studies and projects.
- Continuous monitoring of the levels of underwater sound in the Port of Cartagena, especially during activities that could potentially generate underwater noise during the periods of high sensitivity of any marine species that could be affected.
- Collection of information on marine biodiversity present in the area where activities are carried out and their surroundings. Identifying species with special sensitivity to the potential impact of submarine noise in the vicinity of the Port of Cartagena.
- Incorporating location systems for sensitive species in the port area, through, for example, passive acoustic systems.
- Adopting a set of preventive and corrective measures for activities potentially generating submarine noise, firstly related to the selection and exclusion of areas to carry out activities according to their potential impact and to minimize their environmental impact. Secondly, to control activities in seasons of special sensitivity (migrations, breeding, etc.), including the regulation of activities (navigation, works, etc.) to minimize their possible adverse effects.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pricop, M.; Chitac, V.; Pazara, T.; Popa, A.; Oncica, V. Assessment of underwater noise produced by ships at the entrance of port Constanta. In Proceedings of the 2nd International Conference on Manufacturing Engineering, Quality and Production Systems, Constantza, Romania, 3–5 September 2010. [Google Scholar]
- Etter, P.C. Underwater Acoustic Modeling and Simulation, 5th ed.; CRC Press, Taylor and Francis: Boca Raton, FL, USA, 2018; pp. 293–313. [Google Scholar]
- Andrew, R.K.; Howe, B.M.; Mercer, J.A. Ocean ambient sound: Comparing the 1960s with the 1990s for a receiver off the California coast Noise in the Sea and Its Impacts on Marine Organisms. Acoust. Res. Lett. Online 2002, 3, 65–70. [Google Scholar] [CrossRef]
- Peng, C.; Zhao, X.; Liu, G. Noise in the Sea and Its Impacts on Marine Organisms. Int. J. Environ. Res. Public Health 2015, 12, 12304–12323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weilgart, L. The Impact of Ocean Noise Pollution on Fish and Invertebrates. Report for OceanCare. Switzerland. 2018. Available online: https://www.oceancare.org/wp-content/uploads/2017/10/OceanNoise_FishInvertebrates_May2018.pdf (accessed on 27 October 2019).
- Popper, A.N.; Hastings, M.C. The effects of anthropogenic sources of sound on fishes. J. Fish Biol. 2009, 75, 455–489. [Google Scholar] [CrossRef] [PubMed]
- Williams, R.; Wright, A.J.; Ashe, E.; Blight, L.K.; Bruintjes, R.; Canessa, R.; Clark, C.W.; Cullis-Suzuki, S.; Dakin, D.T.; Erbe, C.; et al. Impacts of anthropogenic noise on marine life: Publication patterns, new discoveries, and future directions in research and management. Ocean Coast. Manag. 2015, 115, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Cruz, E.; Luis, A.R.; dos Santos, M.E. Underwater noise in the Sado Estuary, Portugal, and its potential impact on the resident bottlenose dolphins. In Proceedings of the 26th European Cetacean Society Conference, At Galway, Ireland, 26–28 March 2012. [Google Scholar]
- Farcas, A.; Thompson, P.M.; Merchant, N.D. Underwater noise modelling for environmental impact assessment. Environ. Impact Assess. Rev. 2016, 57, 114–122. [Google Scholar] [CrossRef] [Green Version]
- Salgado, C.P.; McCauley, R.D.; Parnum, I.M.; Gavrilov, A.N. Underwater noise sources in Fremantle inner harbour: Dolphins, pile driving and traffic. In Proceedings of the Acoustic 2012, Fremantle, Australia, 21–23 November 2012. [Google Scholar]
- Duncan, A.J.; McCauley, R.D.; Parnum, I.; Salgado-Kent, C. Measurement and Modelling of Underwater Noise from Pile Driving. In Proceedings of the 20th International Congress on Acoustics (ICA), Sydney, Australia, 23–27 August 2010. [Google Scholar]
- Borsani, J.F.; Clark, C.W.; Nani, B.; Scarpiniti, M. Fin whales avoid loud rhythmic low-frequency sounds in the Ligurian Sea. Bioacoustics 2008, 17, 161–163. [Google Scholar] [CrossRef]
- Castellote, M.; Clark, C.W.; Lammers, M.O. Acoustic and behavioural changes by fin whales (Balaenoptera physalus) in response to shipping and air-gun noise. Biol. Conserv. 2012, 147, 115–122. [Google Scholar] [CrossRef]
- Dekeling, R.; Tasker, M.; Van Der Graaf, S.; Ainslie, M.; Andersson, M.; André, M.; Drensing, K.; Castellote, M.; Cronin, D.; Dalen, J.; et al. Monitoring Guidance for Underwater Noise in European Seas, Part II: Monitoring Guidance Specifications. JRC Scientific and Policy Report EUR 26555. [CrossRef]
- MSFD. Calibration Guidelines. Available online: www.quietmed-project.eu/wp-content/uploads/2019/01/QUIETMED_D3.1.-Best_practices_guidelines_on_sensor_calibration_final.pdf. (accessed on 27 October 2019).
- MSFD. Signal Processing Guidelines. Available online: http://www.quietmed-project.eu/wp-content/uploads/2019/01/QUIETMED_D3.2_Best_practices-guidelines_on_signal_processing_final.pdf. (accessed on 27 October 2019).
- MSFD. Acoustic Modelling Processing Guidelines. Available online: http://www.quietmed-project.eu/wp-content/uploads/2019/01/QUIETMED_D3.3_Best-practices-guidelines-on-acoustic-modelling-and-mapping_final.pdf. (accessed on 27 October 2019).
- Tougaard, J.; Carstensen, J.; Teilmann, H.; Skov, P. Rasmussen. Pile driving zone of responsiveness extends beyond 20 km for harbor porpoises. J. Acoust Soc. Am. 2009, 126, 11. [Google Scholar] [CrossRef] [PubMed]
- Aarts, G.; von Benda-Beckmann, A.M.; Lucke, K.; Sertlek, H.Ö.; van Bemmelen, R.; Geelhoed, S.C.V.; Brasseur, S.; Scheidat, M.; Lam, F.P.A.; Slabbekoorn, H.; et al. Harbour porpoise movement strategy affects cumulative number of animals acoustically exposed to underwater explosions. Mar. Ecol. Prog. Ser. 2016, 557, 261–275. [Google Scholar] [CrossRef] [Green Version]
- Fewtrell, J.L.; McCauley, R.D. Impact of air gun noise on the behaviour of marine fish and squid. Mar. Pollut. Bull. 2012, 64, 984–993. [Google Scholar] [CrossRef] [PubMed]
- Dolman, S.J.; Evans, P.G.H.; Notarbartolo-di-Sciara, G.; Frisch, H. Active sonar, beaked whales and European regional policy. Mar. Pollut. Bull. 2011, 63, 27–34. [Google Scholar] [CrossRef] [PubMed]
- Götz, T.; Janik, V.M. Acoustic deterrent devices to prevent pinniped depredation: Efficiency, conservation concerns and possible solutions. Mar. Ecol. Prog. Ser. 2013, 492, 285–302. [Google Scholar] [CrossRef]
- González-Reolid, I.; Molina Molina, J.C.; Guerrero-González, A.; Ortiz, F.J.; Alonso, D. An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water. Sensors 2018, 18, 3497. [Google Scholar] [CrossRef] [PubMed]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; McGraw-Hill Inc.: New York, NY, USA, 1996. [Google Scholar]
- Leighton, T.G. Fundamentals of Underwater Acoustics. In Fundamentals of Noise and Vibrations, 1st ed.; Fahy, F.J., Walker, J.G., Eds.; Taylor and Francis: London, UK, 1998. [Google Scholar]
- Schulkin, M.; Mercer, J.A. Colossus Revisited: A Review and Extension of the Marsh-Schulkin Shallow Water Transmission Loss Model. Applied Physics Laboratory, University of Washington, APL-UW 8508. 1985. [Google Scholar]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Enguix, I.F.; Sánchez Egea, M.; Guerrero González, A.; Arenas Serrano, D. Underwater Acoustic Impulsive Noise Monitoring in Port Facilities: Case Study of the Port of Cartagena. Sensors 2019, 19, 4672. https://doi.org/10.3390/s19214672
Enguix IF, Sánchez Egea M, Guerrero González A, Arenas Serrano D. Underwater Acoustic Impulsive Noise Monitoring in Port Facilities: Case Study of the Port of Cartagena. Sensors. 2019; 19(21):4672. https://doi.org/10.3390/s19214672
Chicago/Turabian StyleEnguix, Ivan Felis, Marta Sánchez Egea, Antonio Guerrero González, and David Arenas Serrano. 2019. "Underwater Acoustic Impulsive Noise Monitoring in Port Facilities: Case Study of the Port of Cartagena" Sensors 19, no. 21: 4672. https://doi.org/10.3390/s19214672