As indicated in Equation (14), the positioning errors of the two algorithms mentioned above are related to the measurement error and the dilution of precision. The accuracy of the Doppler measurement is at the mm/s level [
23]. Meanwhile, the accuracy of the Doppler differential measurement obtained by the static positioning test is also at the millimeter level. Whether the Doppler differential positioning algorithm is better than the Doppler positioning algorithm in reducing positioning error, and whether the Doppler differential positioning algorithm can improve the horizontal dilution of precision, are further discussed below. The measurement error caused by cycle-slip will have a significant impact on positioning accuracy; thus, some cycle-slip detection methods are required.
5.1. Deviation of the Receiver Antenna Coordinate
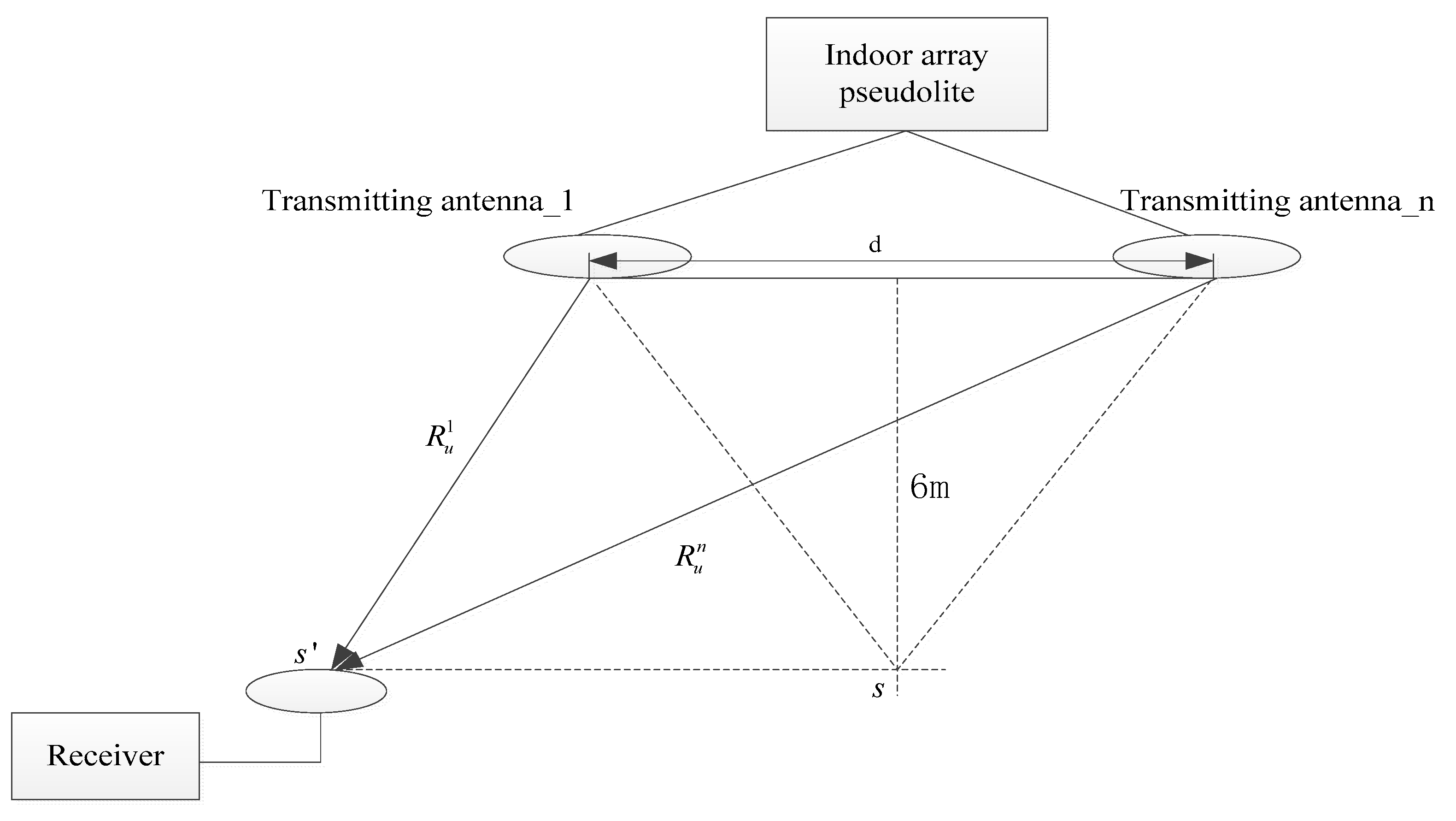
During the initialization of known points and the location processing, there will be some deviations in the antenna coordinates of the receiver, as shown in
Figure 9. If the receiver moves from
to
, then
, where
is the distance from the receiver to transmitting antenna 1, and
is the distance from the receiver to transmitting antenna
n. Assuming that the error of the receiver antenna coordinate is
, and other measurement errors are ignored, Equation (5) can be expressed as the following matrix form:
The Doppler observation equations (Equation (6)) can be written as
where B is the error residual for the Doppler observation equations, which is caused by the deviation of the receiver antenna coordinate.
The differential positioning equation (Equation (9)) is denoted by
where C is the error residual for the differential positioning equation, which is caused by the deviation of the receiver antenna coordinate.
Although the residual equations B and C are treated nonlinearly by the least squares updated solution in Equation (11), it is very difficult to analyze the error by a mathematical method. However, some very useful conclusions can be reached: 1) if the receiver is stationary, then,, and the speed of the receiver is not affected by the deviation of the receiver antenna coordinate; and 2) the deviation needs to be much smaller than the distance from the receiver to the transmitting antenna, otherwise the least squares updated equation will not converge.
According to
Table 1, if the distance between two transmitting antennas is less than or equal to 3 m, then
, and because
(the height between the transmitting antenna and the ground is 6 m),
, In order to prove the above analysis results, the x-error or y-error is manually added to the coordinates of KPI (
= 4.0 m,
= 4.0 m). The velocity of the receiver is calculated as (
= 4.0 m,
= 4.0 m) and (
= 0 m,
= 0 m) and the velocity measurement error can be written as
The velocity measurement error is greatly increased in the 24th epoch of
Table 5, and the least squares updated equation will not converge in the 25th epoch of the Doppler positioning method. Therefore, the differential positioning method is more tolerant to the deviation in the antenna coordinates of the receiver than the Doppler positioning method. Under the same deviation conditions, the velocity measurement accuracy of the former is also better than the latter, as shown in
Table 5.
The initialization coordinates are mainly obtained by QR codes on the ground, and the initial position accuracy by using a visual location in the actual system is within 0.5 m; thus,
is 0.5 m and
is 0.5 m. The average velocity measurement errors caused by deviations of the receiver coordinates are about 10 mm/s for the two methods, as shown in
Table 6. Therefore, the contributions of the two methods to the positioning accuracy are the same in actual use.
5.2. Deviation of the Receiver Antenna Coordinate
According to the geometric relationship between the transmitting antennas and receiver, we assume that the error of the receiver antenna coordinate is
, where
n = 1,2,…,
n. The Doppler observation equations (Equation (6)) can be written as
The differential positioning equation (Equation (9)) is denoted by
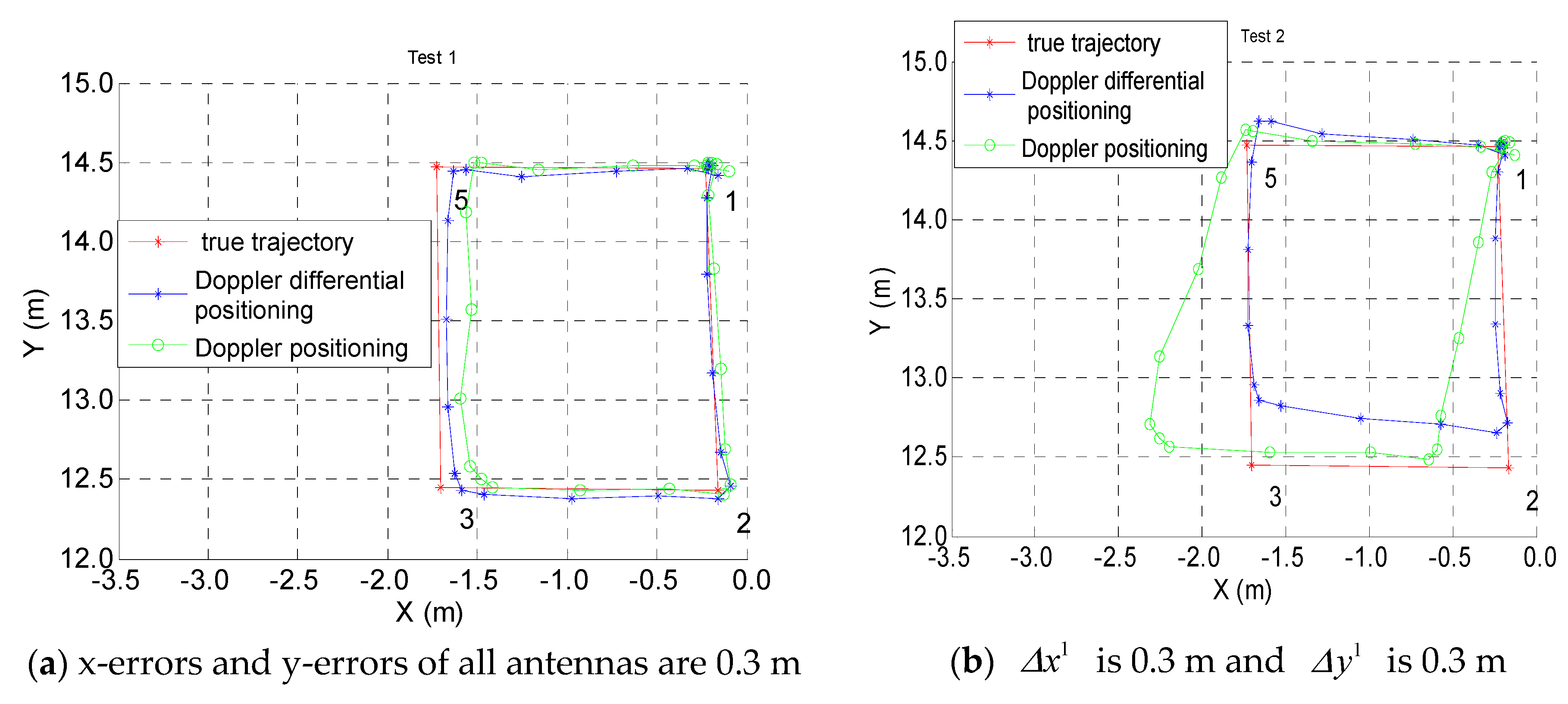
The residual equations D and E are treated nonlinearly by the least squares updated solution (11), and it is very difficult to analyze the error by a mathematical method. The x-error or y-error, which ranges from 0.1 m to 0.3 m, is manually added to the coordinates of all transmitting antennas (the transmitting antennas in
Table 1), and the data set for a kinematic test on a square trajectory in
Figure 8 has been used. It can be found from
Figure 10 that the deviation of the transmitting antenna will affect the positioning accuracy of the two methods, and if the differential positioning method cannot mitigate the antenna position error, the positioning accuracy of the differenced method is not necessarily better than that of the undifferenced method.
5.3. Horizontal Dilution of Precision (HDOP)
Because of the narrow space, the aesthetic requirement of buildings, and constraints on equipment structure, it is difficult to get a good distribution for indoor array pseudolite; thus, a bad HDOP is mainly due to the distribution of pseudolite. The coordinates of the transmitting antennas are shown in
Table 1, which are approximately distributed in a circular shape with the diameter of 3 m and are the same height from the ground.
Figure 11 shows the horizontal dilution of precision on a straight-line trajectory in the kinematic test: the average HDOP of the Doppler differential positioning algorithm is 11.2, and the average HDOP of the Doppler positioning algorithm is 29.46.
According to the coordinates in
Table 1, the HDOP values of the two positioning algorithms mentioned above are compared by a simulation; the area of the simulation analysis is 60 m × 60 m, and the interval is 1 m × 1 m. The coverage is analyzed under different numbers of transmission channels, as shown in
Figure 12 and
Figure 13. By counting the number of grids with an HDOP less than 100 in
Table 7 from 5 to 8 transmitting channels of pseudolite, it can be found that the coverage of the Doppler differential positioning algorithm is better than that of the Doppler positioning algorithm, increasing from 15% to 20%.
Because the size of the measurement noise also varies between the two methods, and the time dilution of precision (TDOP)-term in the differential method disappeared and was included in other DOPs, the performance of the two methods can hardly be analyzed with a mathematical discussion. In addition, because the errors of the antenna coordinates and time synchronization are reduced in the differential method but the errors of uncorrelated measurement are also increased, then, assuming that the measurement errors of the two methods are the same, the difference and ratio of the HDOP between the Doppler positioning algorithm and the Doppler differential positioning algorithm are used for qualitative analysis, as shown in
Figure 14 and
Figure 15. By counting the number of grids for the difference of HDOP (D_HDOP) in
Table 8, and for the difference of HDOP (R_HDOP) in
Table 9, it can be found that the HDOP of the Doppler positioning algorithm is greater than that of Doppler differential positioning algorithm; there are about 716 grids with D_HDOP greater than 10 and less than 50, accounting for about 33% of the total grids. There are about 852 grids with R_HDOP greater than 1.5, accounting for about 42% of the total grids. On the other hand, if the error term using differenced measurement may be 1.4 times of undifferenced measurements [
24], the differenced method may improve the positioning accuracy in nearly 42% of the test area; however, the positioning accuracy of the differenced method may unfortunately not be better than that of the undifferenced method in nearly 58% of the test area.
5.4. Cycle-Slip Detection
The carrier phase jump will affect the accuracy of Doppler measurements, which will then affect the accuracy of indoor positioning. The causes of cycle-slips for carrier phase observations in the indoor environment are listed as below: (1) cycle-slips are caused by obstructions of the pseudolite signal due to the presence of buildings and pedestrians; and (2) cycle-slips have a low carrier-to-noise-power-density ratio (C/N0) due to multipath, near-far effect [
25,
26,
27]. The carrier phase and Doppler measurement characteristics of indoor pseudolite (no ionospheric error, tropospheric error and time synchronization error) are different from GNSS. The Doppler-aided cycle-slip detection method (DACS) and the carrier phase double difference cycle-slip detection method (CPDD) are used.
Doppler shifts can be used to detect cycle-slips in carrier phase observations between neighboring epochs. The carrier phase observation at one epoch is predicted based on the Doppler shift and the carrier phase observation from the previous epoch.
where
is the predicted carrier phase observation from channel
to receiver
u at epoch
,
is the carrier phase observation at epoch (t),
is Doppler observation at epoch t, and
is the time span between epoch
and epoch (t).
Doppler-aided cycle-slip detection can be expressed as
where
is the carrier phase observation at epoch
,
is a cycle-slip detection threshold, and
is the deviations between the carrier phase observations from the receiver and those predicted from Doppler observations.
In the static test at test point 3, the raw data of channel 1 and channel 6 are analyzed regarding the performance of the cycle-slip detection approach. As shown in the top panel of
Figure 16, there are no cycle-slips in channel 1, and there are some cycle-slips on channel 6. The deviations between carrier phase observations measured by a receiver and those predicted from Doppler observations are shown in the bottom panel of
Figure 16; cycle-slips of one cycle or greater from epoch 59 to epoch 67 can be directly detected by the Doppler-aided cycle-slip detection method when the threshold is 0.8; the cycle-slips of a half-wavelength in epoch 102 can also be detected when the threshold is 0.4.
The three-dimensional data of the Doppler-aided cycle-slip detection method for the kinematic test are shown in the left panel of
Figure 17; the X-axis is the channel number of the pseudolite, the Y-axis shows epochs from 1 to 30, and the Z-axis shows the deviations between the carrier phase measured by a and predicted from the Doppler observations. In the kinematic test from epoch 1 to epoch 14, some cycle slips of one cycle or greater are at epoch 13 of channel 5 and epoch 14 of channel 6. Meanwhile, there are some deviations greater than a half-wavelength at epoch 7 and epoch 13, but these are mainly caused by the receiver’s speed, and not half-wavelength cycle-slips. In the static test from epoch 15 to epoch 30 in the right panel of
Figure 17, all deviations are less than 0.4, and there is no cycle-slip. Therefore, it can be seen that the Doppler-aided cycle-slip detection method is suitable for detecting cycle-slips of one cycle or greater.
To detect a half-wavelength cycle-slip in kinematic positioning, the carrier phase double-difference cycle-slip detection method (CPDD) is proposed. The carrier phase difference equation between neighboring epochs can be expressed as
where
is the carrier phase difference equation between epoch (t) and epoch
.
Then, the channel-difference of
between channel
and
can be expressed as
where
is the cycle slip detection threshold, and
is the carrier phase double-difference observations, which can be used to detect cycle-slips of a half-wavelength.
In the kinematic test, one cycle-slip of a half-wavelength is manually inserted into the carrier phase measurements of channel 3 at epoch 5.
Figure 18 shows the kinematic test of cycle-slip detection by the time-difference and channel-difference cycle-slip detection method, and the carrier phase differences between neighboring epochs are shown in the top panel of
Figure 18. If there is no cycle-slip, the time difference of the carrier phase from channel 1 to channel 8 is nearly the same; for example, epoch 2, 3 and 4. If there are some cycle-slips, the time difference of the carrier phase for channel 3 at epoch 5 and epoch 6 may have a big “jump”. After the channel-difference, some half-wavelength cycle-slips can be determined at epoch 5 and 6; the results are shown in the bottom panel of
Figure 18. This shows that the carrier phase double-difference cycle-slip detection method (CPDD) of the epoch which has an occurrence of a half-wavelength cycle-slip is much better than the others.
Figure 19 is the kinematic trajectory with and without cycle-slips of a half-wavelength. When a half-wavelength cycle-slip is manually inserted into the carrier phase measurements of channel 3 at epoch 5, some positioning errors begin to appear at epoch 4 in the absence of the detection of a half-wavelength cycle-slip; this shows that a half-wavelength cycle-slip can cause positioning errors of tens of millimeters (blue line in the left panel of
Figure 19), which is the main positioning error of the BDS/GPS indoor array pseudolite system. The carrier phase double-difference cycle-slip detection method can detect cycle-slips of a half-wavelength in real time (blue line in the right panel of
Figure 19). Therefore, the quality of Doppler measurements can be judged by the quality of carrier phase measurements, and cycle-slip detection methods are very important for the Doppler differential positioning algorithm of pseudolite.


 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}