In-Fiber Collimator-Based Fabry-Perot Interferometer with Enhanced Vibration Sensitivity

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
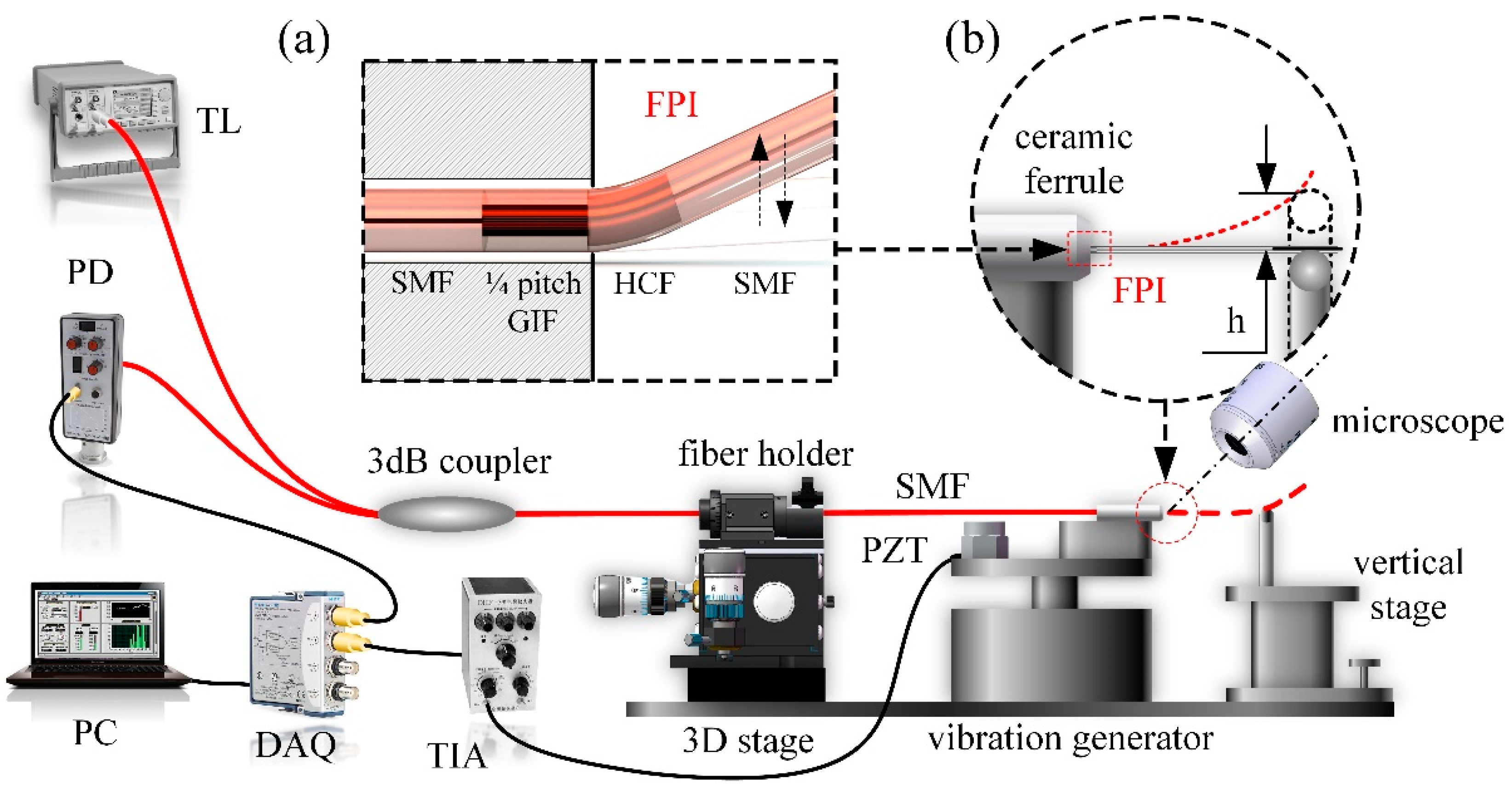
2. Vibration Sensor System
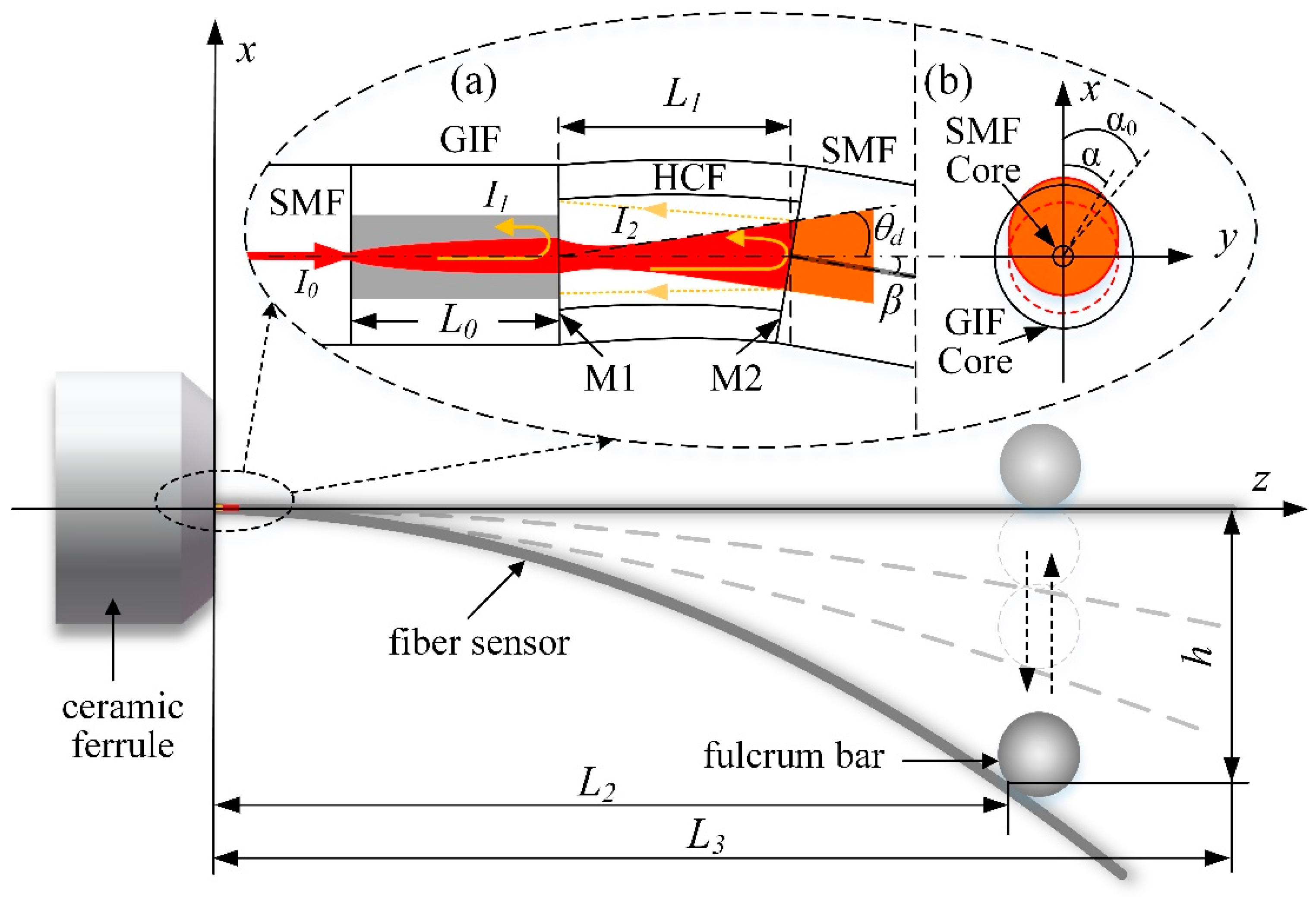
3. Principle of Operation
3.1. Divergence Angle of the Fiber Collimator
3.2. Displacement Response of the Enhanced Fabry-Perot Interferometer
3.3. Natural Frequency of the Device
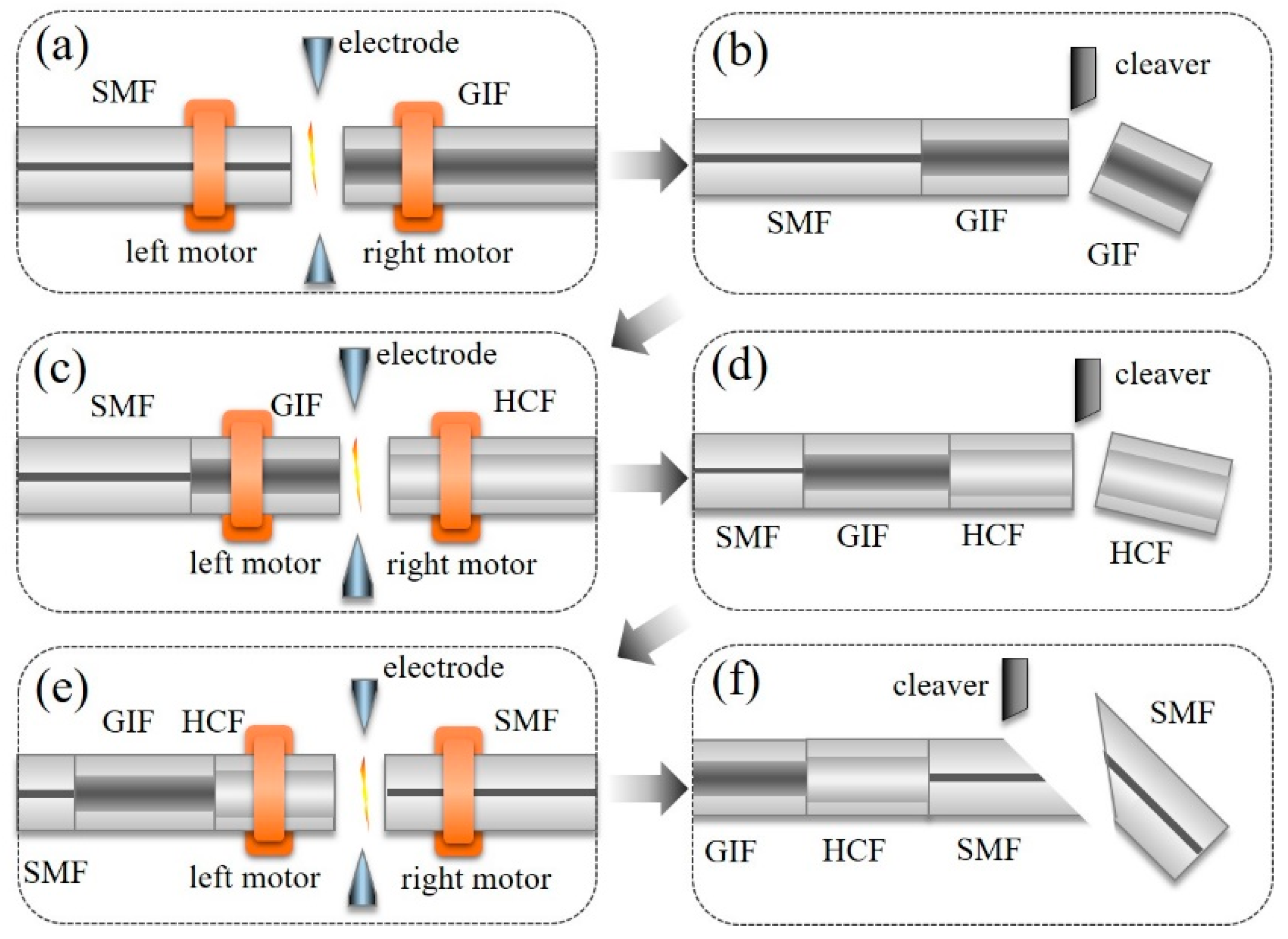
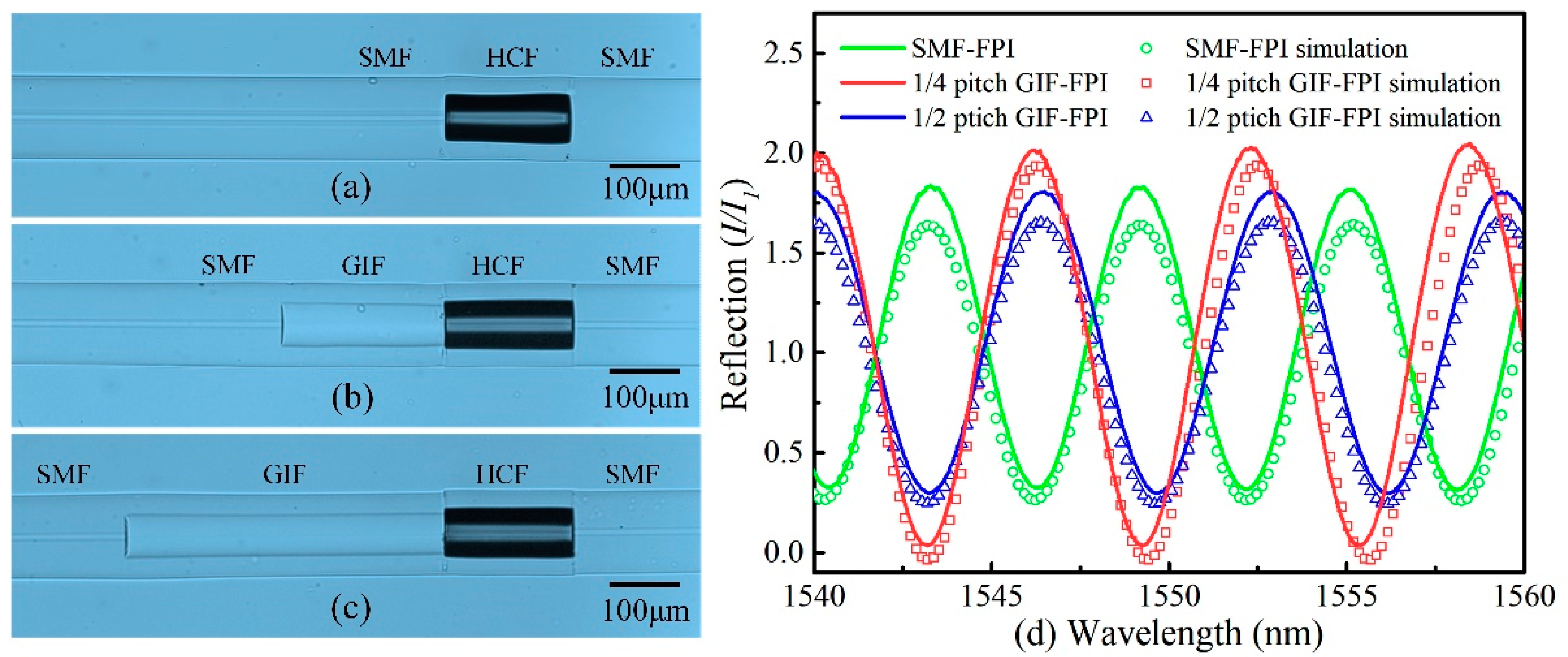
4. Device Fabrication
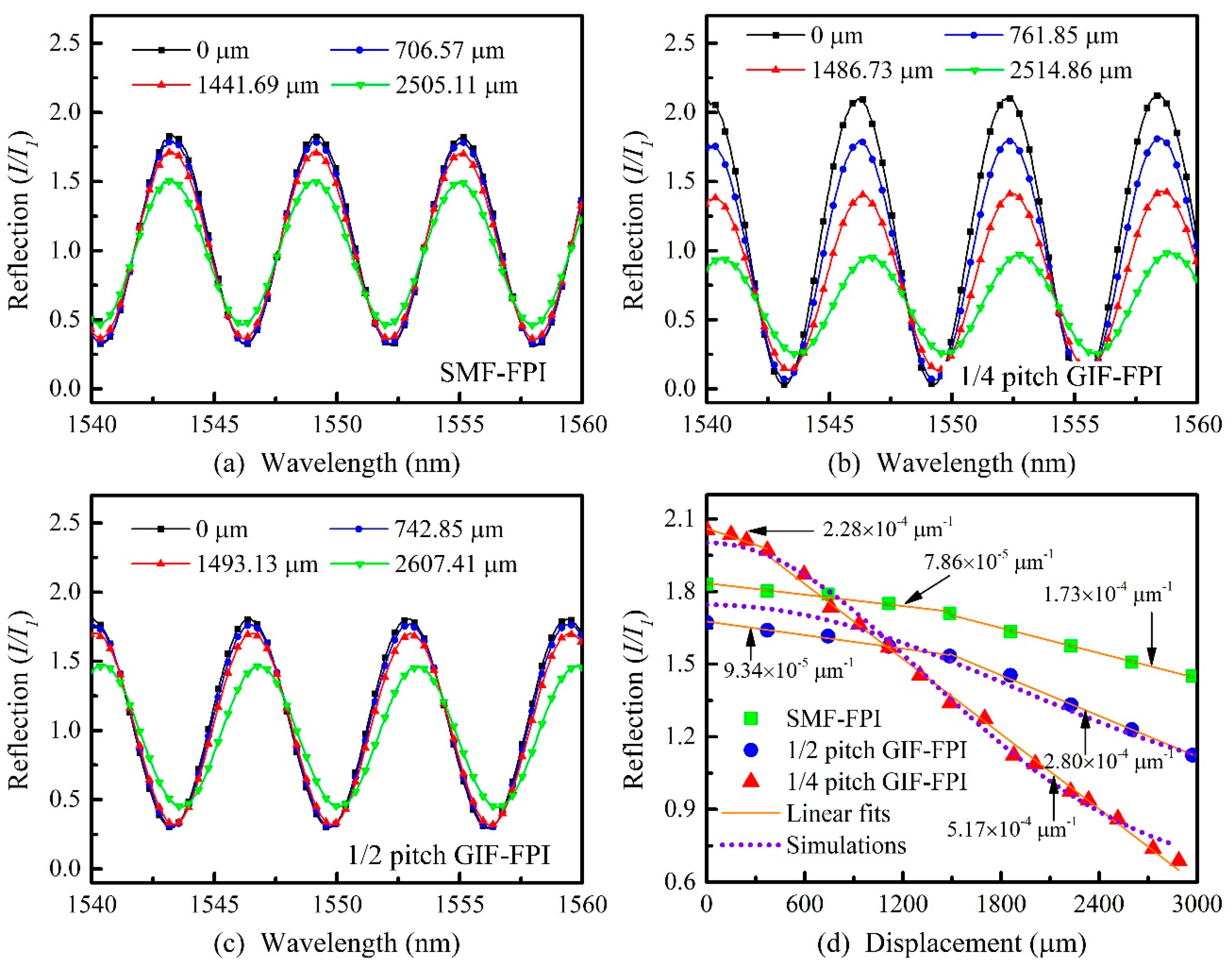
5. Static Displacement Measurement
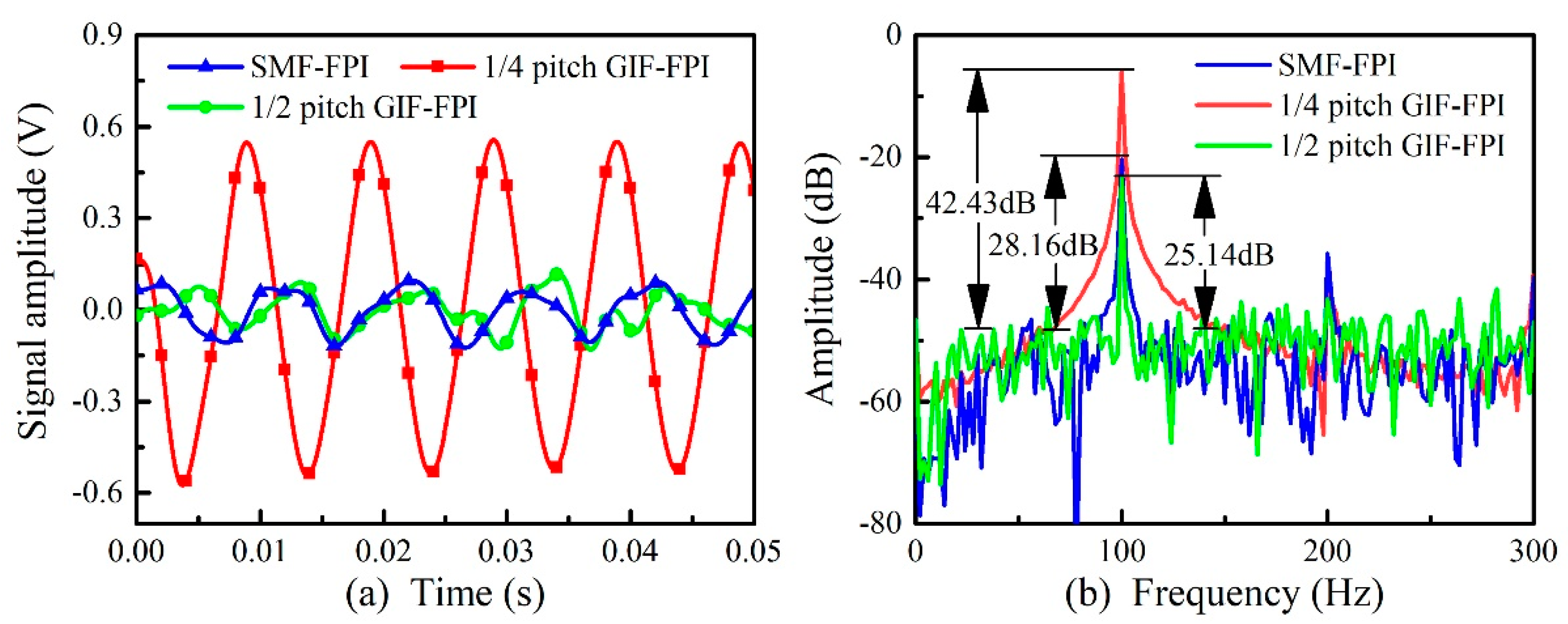
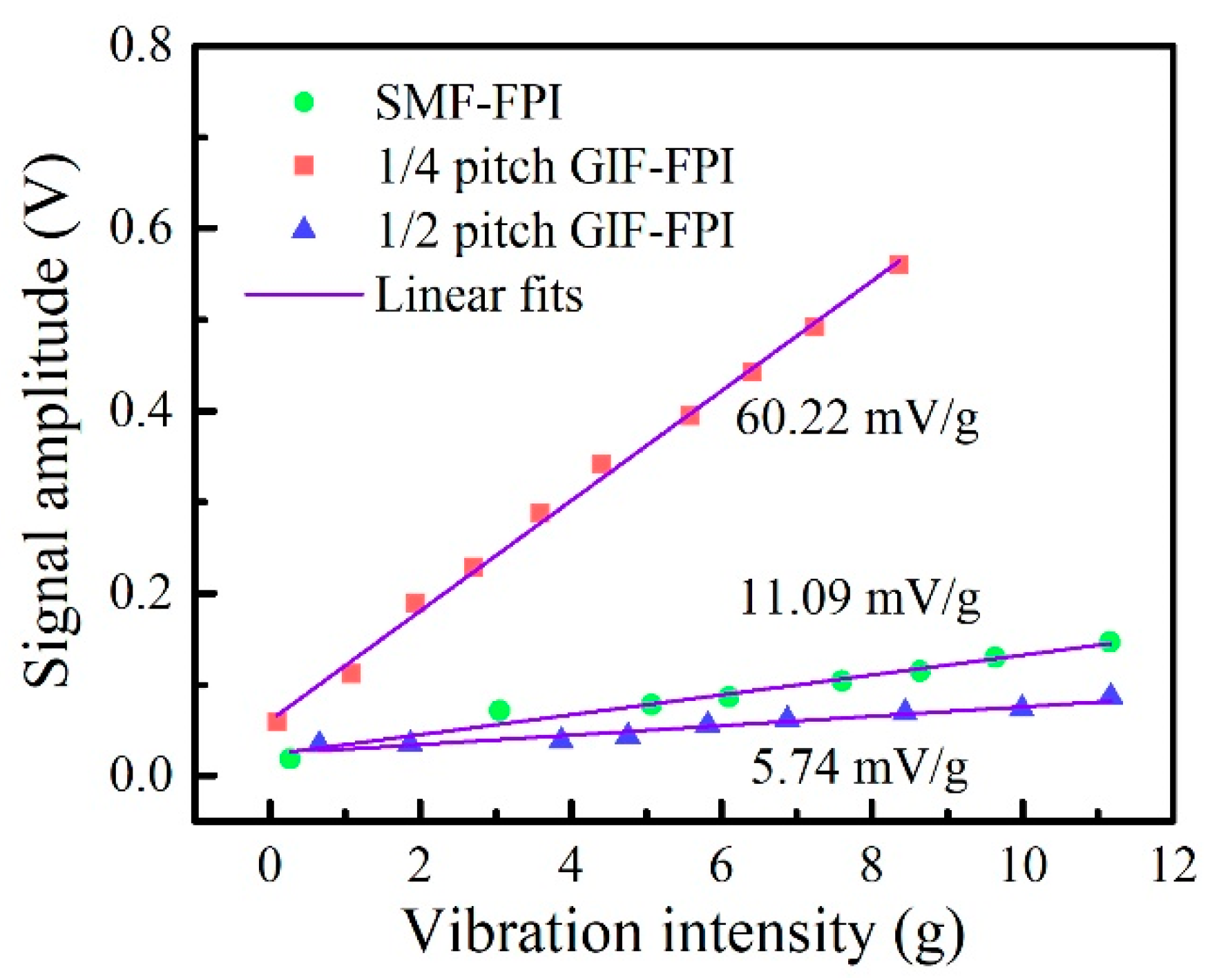
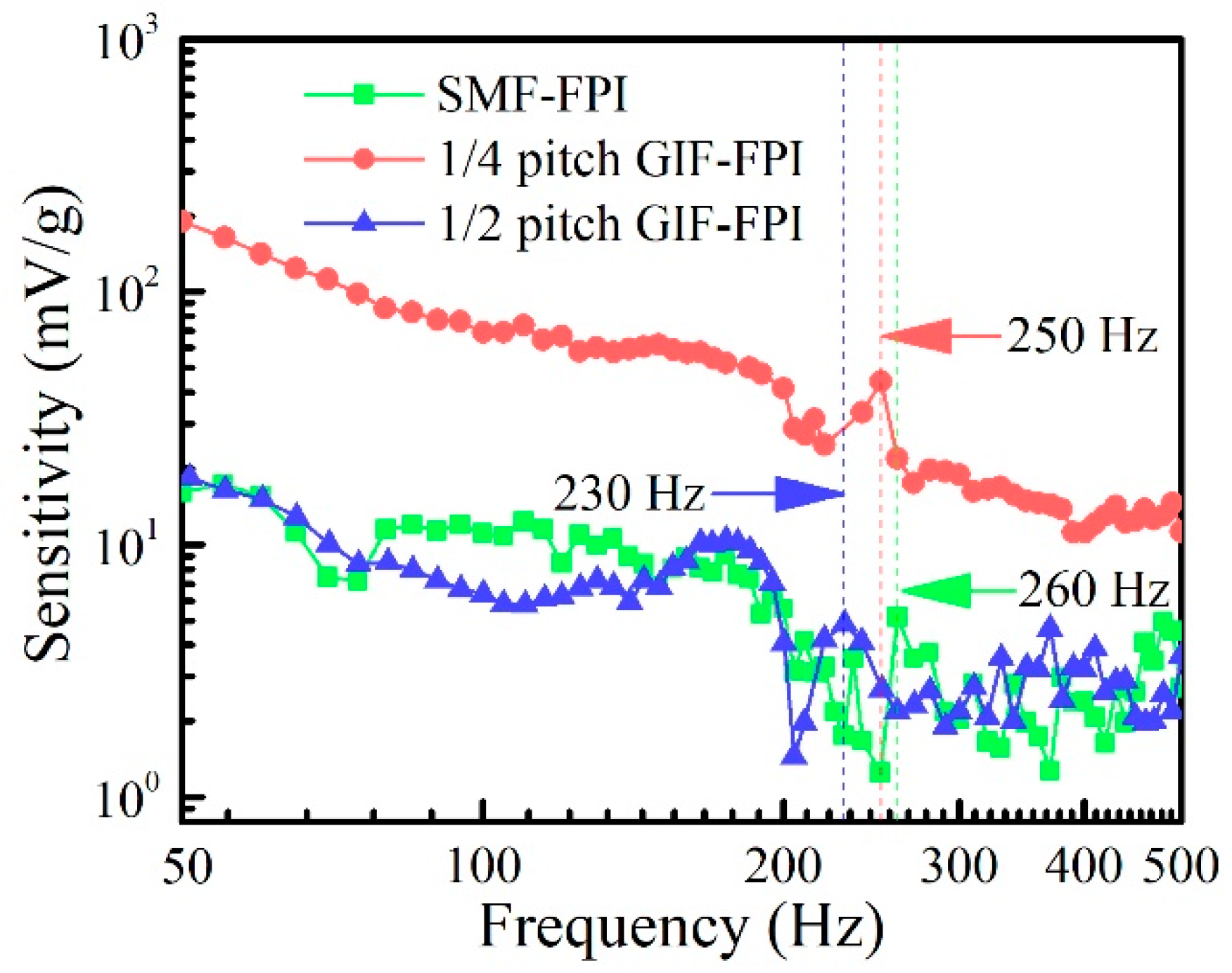
6. Vibration Response
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Colchester, R.J.; Zhang, E.Z.; Mosse, C.A.; Beard, P.C.; Papakonstantinou, I.; Desjardins, A.E. Broadband miniature optical ultrasound probe for high resolution vascular tissue imaging. Biomed. Opt. Express 2015, 6, 1502–1511. [Google Scholar] [CrossRef]
- Manuel, R.M.; Shlyagin, M.G.; Miridonov, S.V.; Meyer, J. Vibration disturbance localization Using a serial array of identical low-finesse fiber Fabry-Perot interferometers. IEEE Sens. J. 2012, 12, 124–127. [Google Scholar] [CrossRef]
- Preisser, S.; Rohringer, W.; Liu, M.; Kollmann, C.; Zotter, S.; Fischer, B.; Drexler, W. All-optical highly sensitive akinetic sensor for ultrasound detection and photoacoustic imaging. Biomed. Opt. Express 2016, 7, 4171–4186. [Google Scholar] [CrossRef] [PubMed]
- Pullteap, S.; Seat, H.C. An extrinsic fiber Fabry-Perot interferometer for dynamic displacement measurement. Photonic Sens. 2014, 5, 50–59. [Google Scholar] [CrossRef] [Green Version]
- Wada, A.; Tanaka, S.; Takahashi, N. Optical fiber vibration sensor using FBG Fabry–Perot interferometer with wavelength scanning and Fourier analysis. IEEE Sens. J. 2012, 12, 225–229. [Google Scholar] [CrossRef]
- Xu, X.; He, J.; Hou, M.; Liu, S.; Bai, Z.; Wang, Y.; Liao, C.; Ouyang, Z.; Wang, Y. A miniature fiber collimator for highly sensitive bend measurements. J. Lightwave Technol. 2018, 36, 2827–2833. [Google Scholar] [CrossRef]
- Zhang, Z.; He, J.; Dong, Q.; Bai, Z.; Liao, C.; Wang, Y.; Liu, S.; Guo, K.; Wang, Y. Diaphragm-free gas-pressure sensor probe based on hollow-core photonic bandgap fiber. Opt. Lett. 2018, 43, 3017–3020. [Google Scholar] [CrossRef]
- Liao, C.; Liu, S.; Xu, L.; Wang, C.; Wang, Y.; Li, Z.; Wang, Q.; Wang, D.N. Sub-micron silica diaphragm-based fiber-tip Fabry-Perot interferometer for pressure measurement. Opt. Lett. 2014, 39, 2827–2830. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.; Liu, S.; Liao, C.; He, J.; Lian, J.; Wang, Y. Growth dynamics of ZnO nanowire on a fiber-tip air bubble. Opt. Mater. Express 2017, 7, 3433. [Google Scholar] [CrossRef]
- Majchrowicz, D.; Hirsch, M.; Wierzba, P.; Bechelany, M.; Viter, R.; Jedrzejewska-Szczerska, M. Application of thin ZnO ALD layers in fiber-optic Fabry-Perot sensing interferometers. Sensors 2016, 16, 416. [Google Scholar] [CrossRef]
- Barnes, J.; Li, S.; Goyal, A.; Abolmaesumi, P.; Mousavi, P.; Loock, H. Broadband vibration detection in tissue phantoms using a fiber Fabry–Perot cavity. IEEE Trans. Biomed. Eng. 2018, 65, 921–927. [Google Scholar] [CrossRef]
- Hirsch, M.; Majchrowicz, D.; Wierzba, P.; Weber, M.; Bechelany, M.; Jedrzejewska-Szczerska, M. Low-coherence interferometric fiber-optic sensors with potential applications as biosensors. Sensors 2017, 17, 261. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Wang, L.; Chen, X.; Zhou, B. Flexible optical fiber Fabry-Perot interferometer based acoustic and mechanical vibration sensor. J. Lightwave Technol. 2018, 36, 2216–2221. [Google Scholar] [CrossRef]
- Zhang, Z.; Liao, C.; Tang, J.; Bai, Z.; Guo, K.; Hou, M.; He, J.; Wang, Y.; Liu, S.; Zhang, F. High-sensitivity gas-pressure sensor based on fiber-tip PVC diaphragm Fabry–Pérot interferometer. J. Lightwave Technol. 2017, 35, 4067–4071. [Google Scholar] [CrossRef]
- Nishino, Z.T.; Chen, K.; Gupta, N. Power modulation-based optical sensor for high-sensitivity vibration measurements. IEEE Sens. J. 2014, 14, 2153–2158. [Google Scholar] [CrossRef]
- Bai, Z.; Gao, S.; Deng, M.; Zhang, Z.; Li, M.; Zhang, F.; Liao, C.; Wang, Y.; Wang, Y. Bidirectional bend sensor employing a microfiber-assisted U-shaped Fabry-Perot cavity. IEEE Photonics J. 2017, 9, 1–8. [Google Scholar] [CrossRef]
- Takamori, A.; Araya, A.; Morii, W.; Telada, S.; Uchiyama, T.; Ohashi, M. A 100-m Fabry–Pérot cavity with automatic alignment controls for long-term observations of earth’s strain. Technologies 2014, 2, 129–142. [Google Scholar] [CrossRef]
- Gardner, D.; Hofler, T.; Baker, S.; Yarber, R.; Garrett, S. A fiber-optic interferometric seismometer. J. Lightwave Technol. 1987, 5, 953–960. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Higuera, J.M.; Morante, M.A.; Cobo, A. Simple low-frequency optical fiber accelerometer with large rotating machine monitoring applications. J. Lightwave Technol. 1997, 15, 1120–1130. [Google Scholar] [CrossRef]
- Kamenev, O.T.; Kulchin, Y.N.; Petrov, Y.S.; Khiznyak, R.V.; Romashko, R.V. Fiber-optic seismometer on the basis of Mach-Zehnder interferometer. Sensor. Actuators A Phys. 2016, 244, 133–137. [Google Scholar] [CrossRef]
- Li, T.; Shi, C.; Tan, Y.; Li, R.; Zhou, Z.; Ren, H. A diaphragm type fiber Bragg grating vibration sensor based on transverse property of optical fiber with temperature compensation. IEEE Sens. J. 2017, 17, 1021–1029. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J. Distributed weak fiber Bragg grating vibration sensing system based on 3 × 3 fiber coupler. Photonic Sens. 2018, 8, 146–156. [Google Scholar] [CrossRef]
- Wang, J.; Wei, L.; Li, R.; Liu, Q.; Yu, L. A fiber Bragg grating based torsional vibration sensor for rotating machinery. Sensors 2018, 18, 2669. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, Y.; Wei, T.; Lan, X.; Huang, Y.; Chen, G.; Xiao, H. Fringe visibility enhanced extrinsic Fabry–Perot interferometer using a graded index fiber collimator. IEEE Photonics J. 2010, 2, 469–481. [Google Scholar] [CrossRef]
- Wang, S.H.; Tay, C.J.; Quan, C.; Shang, H.M. Study of collimating laser diode beam by a graded-index optical fibre. Optik 2001, 112, 531–535. [Google Scholar] [CrossRef]
- Ma, C.; Dong, B.; Gong, J.; Wang, A. Decoding the spectra of low-finesse extrinsic optical fiber Fabry-Perot interferometers. Opt Express 2011, 19, 23727–23742. [Google Scholar] [CrossRef] [PubMed]
- Ghavami, P. Mechanics of Materials: An Introduction to Engineering Technology; Springer: Cham, Switzerland, 2015; pp. 237–244. [Google Scholar] [CrossRef]
- Pérennès, F.; Beard, P.C.; Mills, T.N. Analysis of a low-finesse Fabry–Perot sensing interferometer illuminated by a multimode optical fiber. Appl. Opt. 1999, 38, 7026–7034. [Google Scholar] [CrossRef]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, B.; Xu, X.; He, J.; Guo, K.; Huang, W.; Zhang, F.; Zhang, M.; Wang, Y. In-Fiber Collimator-Based Fabry-Perot Interferometer with Enhanced Vibration Sensitivity. Sensors 2019, 19, 435. https://doi.org/10.3390/s19020435
Du B, Xu X, He J, Guo K, Huang W, Zhang F, Zhang M, Wang Y. In-Fiber Collimator-Based Fabry-Perot Interferometer with Enhanced Vibration Sensitivity. Sensors. 2019; 19(2):435. https://doi.org/10.3390/s19020435
Chicago/Turabian StyleDu, Bin, Xizhen Xu, Jun He, Kuikui Guo, Wei Huang, Fengchan Zhang, Min Zhang, and Yiping Wang. 2019. "In-Fiber Collimator-Based Fabry-Perot Interferometer with Enhanced Vibration Sensitivity" Sensors 19, no. 2: 435. https://doi.org/10.3390/s19020435