Design and Fabrication of a High-Frequency Single-Directional Planar Underwater Ultrasound Transducer

Abstract
:1. Introduction
1.1. Theoretical analysis of 1-3 Piezoelectric Composites
1.2. Preparation of 1-3 Piezoelectric Composites
1.3. Applications of 1-3 Piezoelectric Composites
2. Design, Simulation, and Calculation of the Model Structure by ANSYS Software
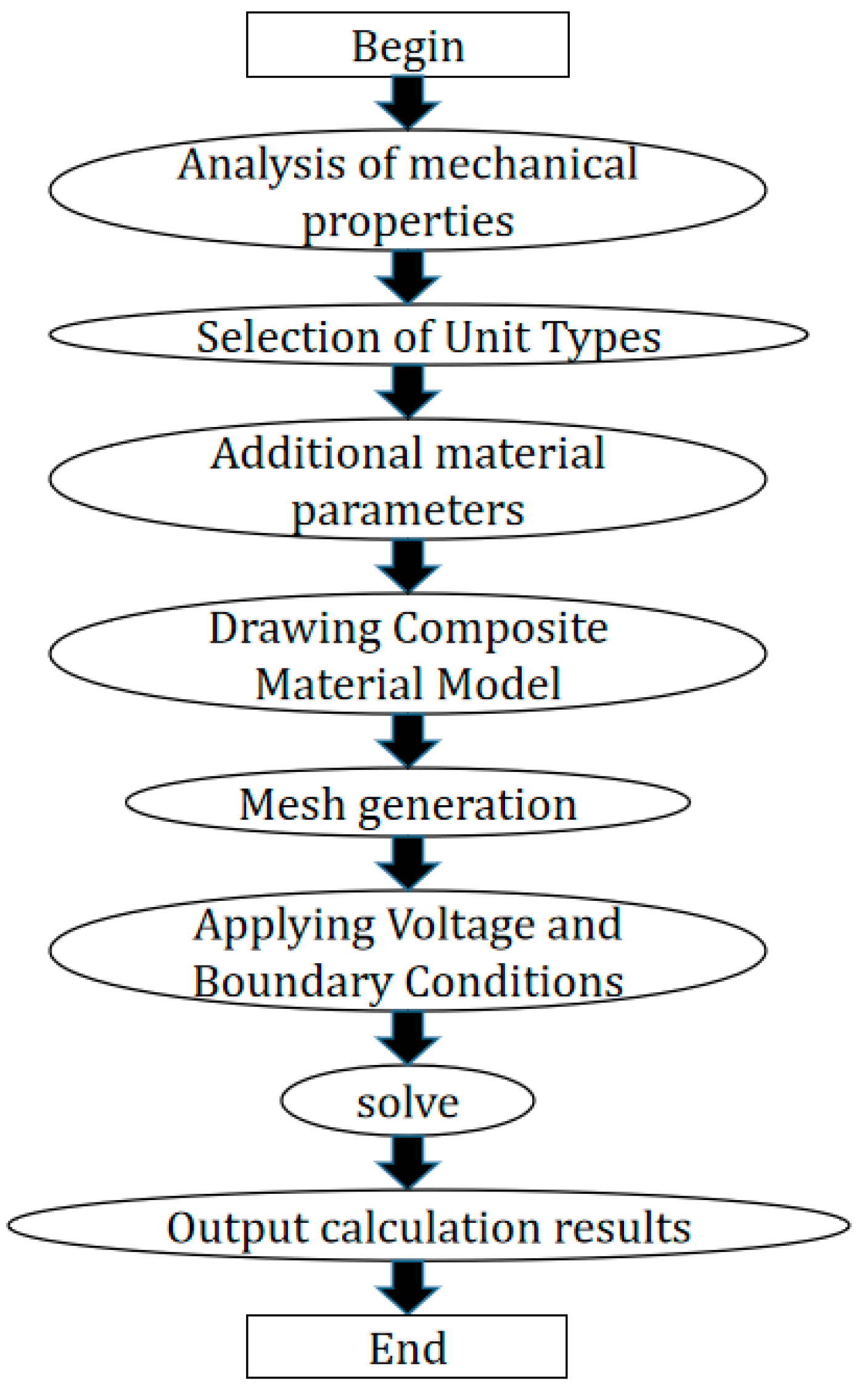
2.1. ANSYS Software for Model Structure Design
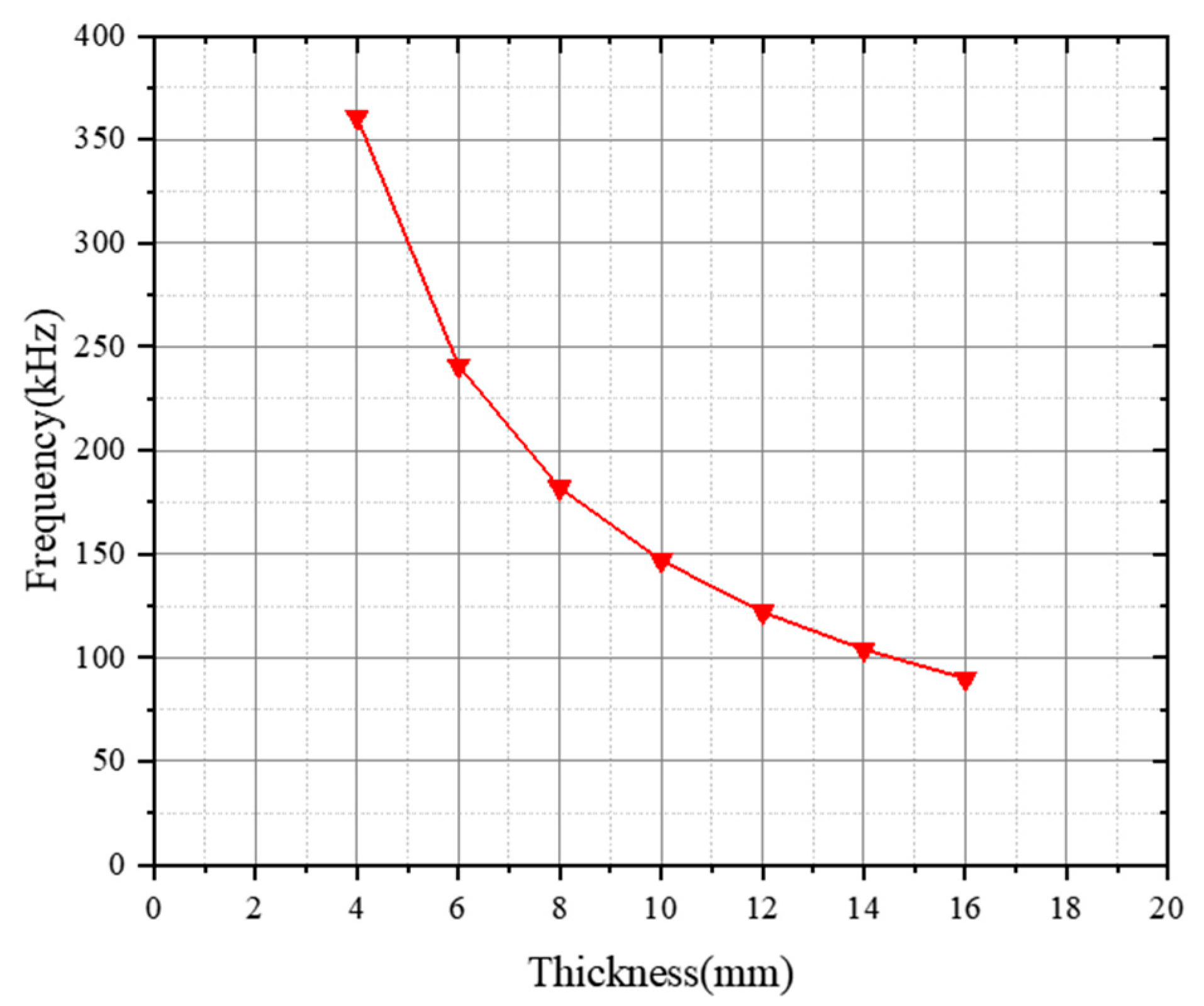
2.2. ANSYS Software for the Simulation and Calculation of the Model Structure
3. Fabrication and Performance Testing of the 1-3 Piezoelectric Composites
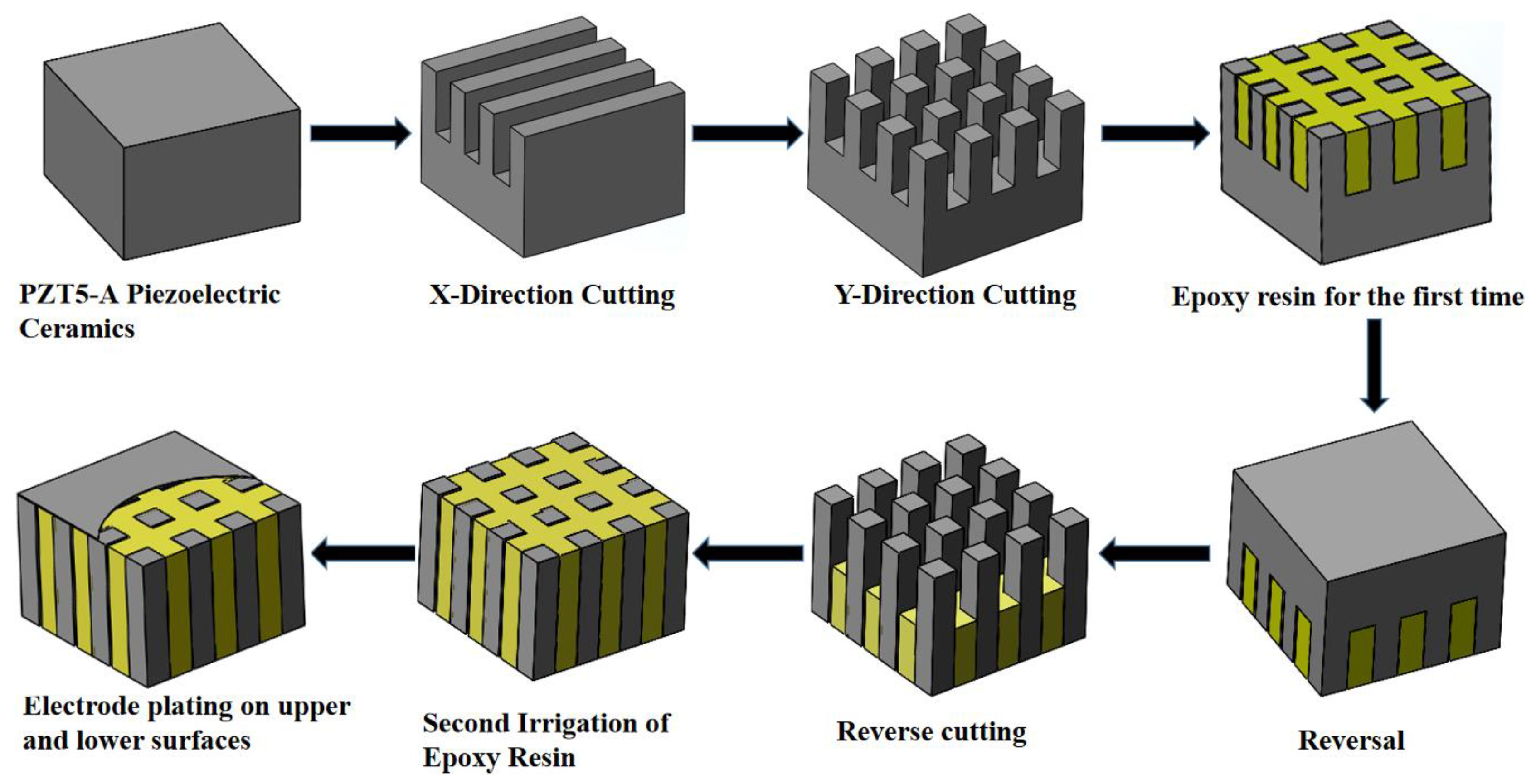
3.1. Fabrication of the 1-3 Piezoelectric Composite
3.2. Performance Testing of the 1-3 Piezoelectric Composite
4. Fabrication and Performance Test of the High-Frequency Single-Directional Planar Underwater Ultrasound Transducer
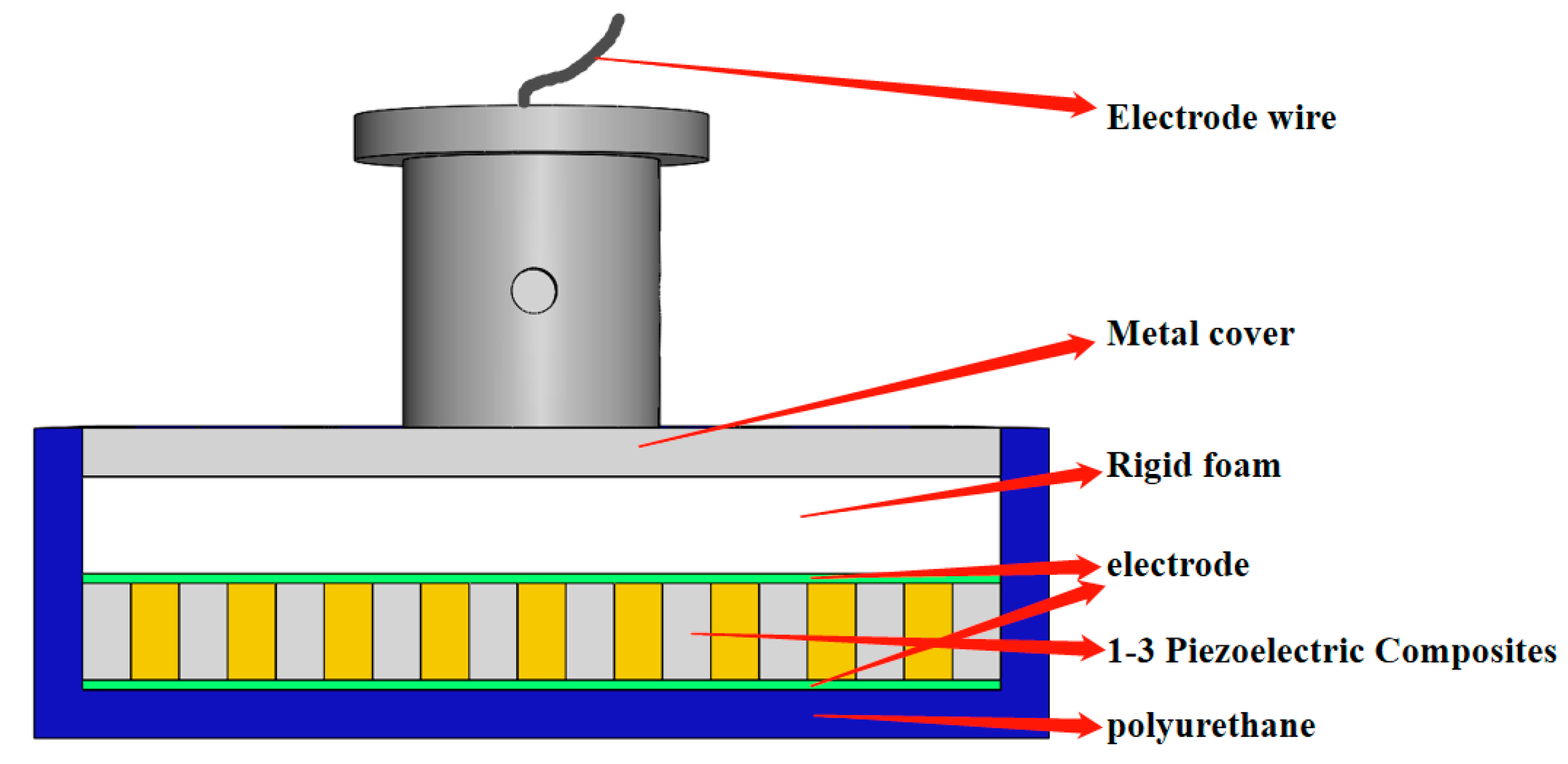
4.1. Fabrication of the High-Frequency Single-Directional Planar Underwater Ultrasound Transducer
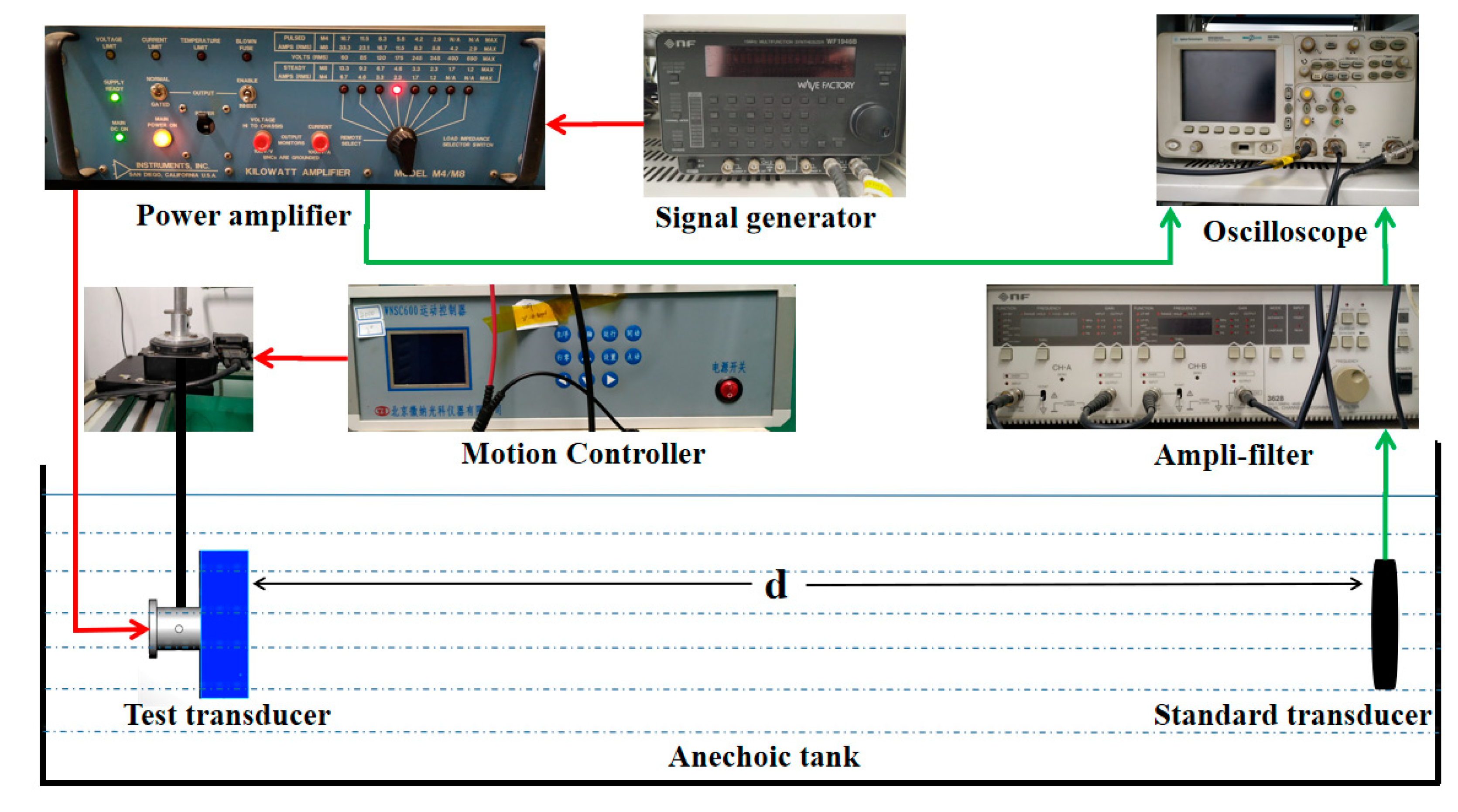
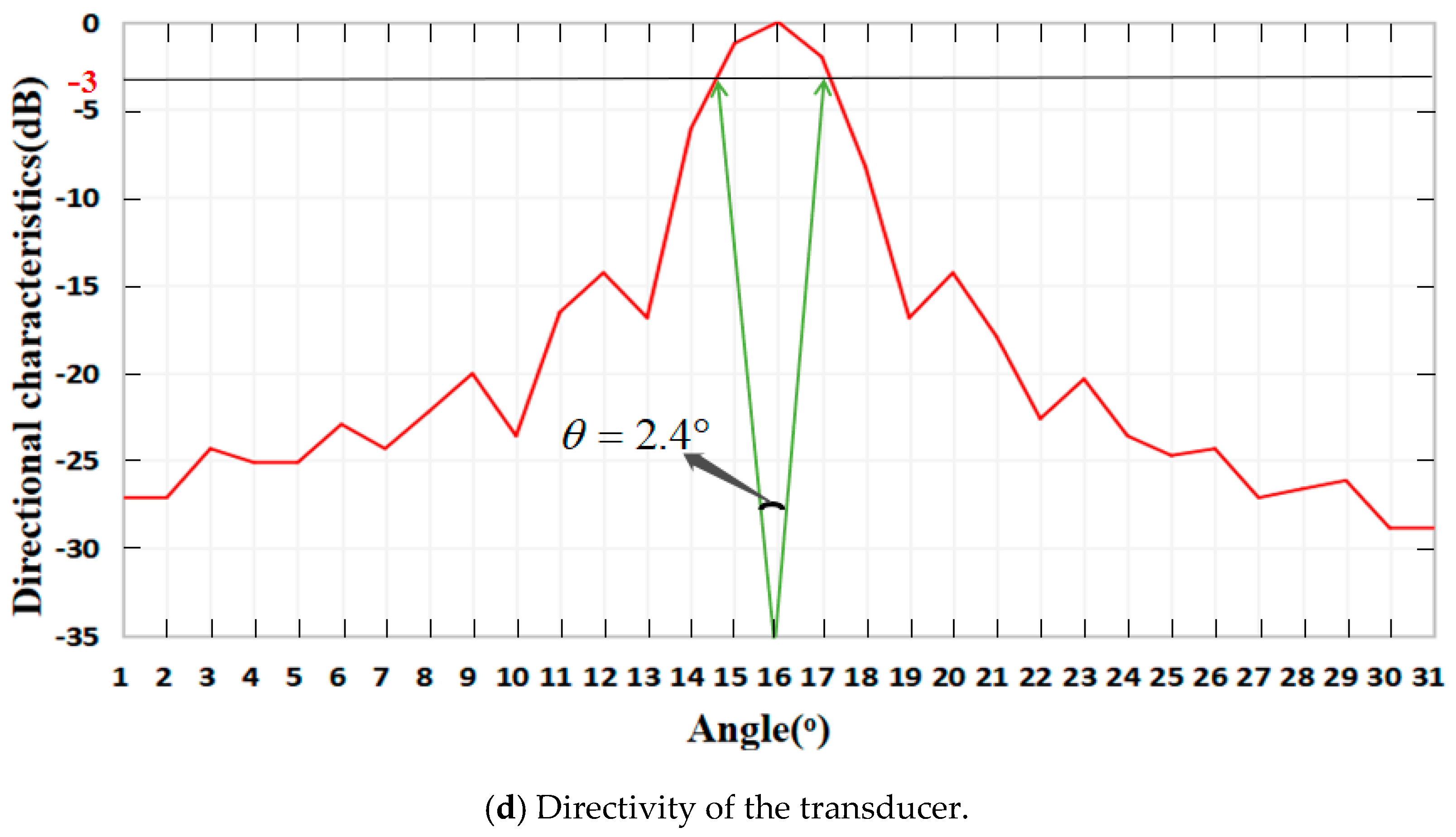
4.2. Performance Test of the High-Frequency Single-Directional Planar Underwater Ultrasound Transducer
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fischer, J.; Herzog, T.; Walter, S. Smart Sensors, Actuators, and MEMS VI—Design and fabrication of a 5 MHz ultrasonic phased array probe with curved transducer. SPIE Proc. 2013, 8763, 87632M. [Google Scholar]
- Costa, D.J.; Buiochi, F.; Elvira, L. Graded piezocomposite for the construction of air-coupled ultrasound transducer. In Proceedings of the Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014. [Google Scholar]
- Newnham, R.; Skinner, D.; Cross, L. Connectivity and piezoelectric-pyroelectric composites. Mater. Res. Bull. 1978, 13, 525–536. [Google Scholar] [CrossRef]
- Furukawa, T. Piezoelectricity and pyroelectricity in polymers. IEEE Electrets. 1989, 24, 375–394. [Google Scholar] [CrossRef]
- Auld, B.A.; Kunkel, H.A.; Shui, Y.A.; Wang, Y. Dynamic Behavior of Periodic Piezoelectric Composites. In Proceedings of the Ultrasonics Symposium, Atlanta, GA, USA, 31 October–2 November 1983. [Google Scholar]
- Smith, W.A.; Shaulov, A.; Auld, B.A. Tailoring the Properties of Composite Piezoelectric Materials for Medical Ultrasonic Transducers. In Proceedings of the IEEE Ultrasonics Symposium Conference, San Francisco, CA, USA, 16–18 October 1985. [Google Scholar]
- Smith, W.; Auld, B. Modeling 1-3 composite piezoelectrics: Thickness-mode oscillations. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1991, 38, 40–47. [Google Scholar] [CrossRef] [PubMed]
- Gentilman, R.; Fiore, D.; Serwatka, W.; Pham, H.; Pazol, B.; Near, C.; Bowen, L. SonoPanel 1-3 piezocomposite hydrophone-actuator panels. In Proceedings of the Challenges of Our Changing Global Environment Oceans, San Diego, CA, USA, 9–12 October 1995. [Google Scholar]
- Chaipanich, A.; Potong, R.; Rianyoi, R.; Jareansuk, L.; Jaitanong, N.; Yimnirun, R. Dielectric and ferroelectric hysteresis properties of 1–3 lead magnesium niobate–lead titanate ceramic/Portland cement composites. Ceram. Int. 2012, 38, S255–S258. [Google Scholar] [CrossRef]
- Topolov, V.Y.; Bowen, C.R.; Filippov, S.E. High Performance of Novel 1–3-Type Composites Based on Ferroelectric PZT-Type Ceramics. Ferroelectr. 2012, 430, 92–97. [Google Scholar] [CrossRef]
- Gualtieri, J.; Kosinski, J.; Ballato, A. Piezoelectric materials for acoustic wave applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1994, 41, 53–59. [Google Scholar] [CrossRef]
- Solal, M.; Gelly, J.F. A new method to decrease grating sidelobes level in medical acoustic arrays. In Proceedings of the IEEE Ultrasonics Symposium, Chicago, IL, USA, 2–5 October 1988. [Google Scholar]
- Jr GA, R.; Pizzochero, A.; Bent, A.A. Recent advances in active fiber composites technology. In Proceedings of the IEEE International Symposium on Applications of Ferroelectrics, Honolulu, HI, USA, 21 July–2 August 2000. [Google Scholar]
- Bent, A.A.; Hagood, N.W. Improved performance in piezoelectric fiber composites using interdigitated electrodes. Smart Struct. Mater. 1995, 2441, 196–213. [Google Scholar]
- Du Plessis, A.J. Modeling and Experimental Testing of Twist Actuated Single Cell Composite Beams for Helicopter Blade Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1996. [Google Scholar]
- Ballandras, S.; Wilm, M.; Edoa, P.-F.; Soufyane, A.; Laude, V.; Steichen, W.; Lardat, R. Finite-element analysis of periodic piezoelectric transducers. J. Appl. Phys. 2003, 93, 702–711. [Google Scholar] [CrossRef] [Green Version]
- Simon, C.; Vanbaren, P.; Ebbini, E. Combined imaging and therapy with piezocomposite phased arrays. In Proceedings of the IEEE Ultrasonics Symposium, Sendai, Japan, 5–8 October 1998. [Google Scholar]
- Mo, X.P. Simulation and analysis of acoustics transducers using the ANSYS software. Tech. Acoustics 2007, 26, 1283–1286. [Google Scholar]
- Livneh, S.S.; Ting, S.M.; Safari, A. Development of fine scale and large area piezoelectric ceramic fiber/polymer composites for transducer applications. Ferroelectrics 1994, 157, 421–426. [Google Scholar] [CrossRef]
- Stevenson, J.W.; Reidmeyer, M.R.; Huebner, W. Fabrication and Characterization of PZT/Thermoplastic Polymer Composites for High-Frequency Phased Linear Arrays. J. Am. Ceram. Soc. 1994, 77, 2481–2484. [Google Scholar] [CrossRef]
- Wan, J.G.; Tao, B.Q. Design and study on a 1–3 anisotropy piezocomposite sensor. Mater. Des. 2000, 21, 533–536. [Google Scholar] [CrossRef]
- Zeng, D.; Li, K.; Yung, K.; Chan, H.; Choy, C.; Xie, C.; Yung, W.K.C. UV laser micromachining of piezoelectric ceramic using a pulsed Nd:YAG laser. Appl. Phys. A 2004, 78, 415–421. [Google Scholar] [CrossRef]
- Ohara, Y.; Miyayama, M.; Koumoto, K.; Yanagida, H. PZT-polymer composites fabricated with YAG laser cutter. Sens. Actuators A Phys. 1994, 40, 187–190. [Google Scholar] [CrossRef]
- Ohara, Y.; Miyayama, M.; Koumoto, K.; Yanagida, H. Partially stabilized zirconia-polymer composites fabricated with an ultrasonic cutter. J. Mater. Sci. Lett. 1993, 12, 1279–1282. [Google Scholar] [CrossRef]
- Gachagan, A.; Bennett, J.; Hayward, G. A finite-element modelling approach into the influence of mechanical matching and damping in 1-3 piezocomposites. In Proceedings of the Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994. [Google Scholar]
- Gómez Alvarez-Arenas, T.E. Air-Coupled Piezoelectric Transducers with Active Polypropylene Foam Matching Layers. Sensors 2013, 13, 5996–6013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benjamin, K.C.; Petrie, S. The design, fabrication, and measured acoustic performance of a 1-3 piezoelectric composite Navy calibration standard transducer. J. Acoust. Soc. Am. 2001, 109, 1973–1978. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J. Optimization of Matching Layer Design for Medical Ultrasonic Transducer. Ph.D. Thesis, The Pennsylvania State University, University Park, PA, USA, 2008. [Google Scholar]
- Luan, G.; Zhang, J.; Wang, R. Piezoelectric Transducer and Transducer Array; Peking University Press: Beijing, China, 2005; pp. 326–336. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length (mm) | Width (mm) | Thickness (mm) | Quality (g) | Density (kg/m3) | Bandwidth (kHz) |
|---|---|---|---|---|---|
| 100 | 100 | 10 | 443.52 | 4435.2 | 1.71 |
| Sound Velocity (m/s) | Acoustic Impedance (Mray1) | Resonant Frequency (kHz) | Conductance (mS) | Electromechanical Coupling Coefficient | Mechanical Quality Factor |
| 3940 | 17.47 | 151.00 | 104.6 | 0.68 | 88.18 |
| Ambient Temperature | Cable Length | Depth of Water Inflow | Water Temperature | Insulation Resistance | Direct Capacitance | Test Distance |
|---|---|---|---|---|---|---|
| 21.0 °C | 8.0 m | 0.4 m | 18.0 °C | 500 MΩ | 9000 pF | 0.87 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Q.; Wang, H.; Hao, S.; Zhong, C.; Wang, L. Design and Fabrication of a High-Frequency Single-Directional Planar Underwater Ultrasound Transducer. Sensors 2019, 19, 4336. https://doi.org/10.3390/s19194336
Huang Q, Wang H, Hao S, Zhong C, Wang L. Design and Fabrication of a High-Frequency Single-Directional Planar Underwater Ultrasound Transducer. Sensors. 2019; 19(19):4336. https://doi.org/10.3390/s19194336
Chicago/Turabian StyleHuang, Qiguo, Hongwei Wang, Shaohua Hao, Chao Zhong, and Likun Wang. 2019. "Design and Fabrication of a High-Frequency Single-Directional Planar Underwater Ultrasound Transducer" Sensors 19, no. 19: 4336. https://doi.org/10.3390/s19194336