Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars

Abstract
:1. Introduction
2. Method Description
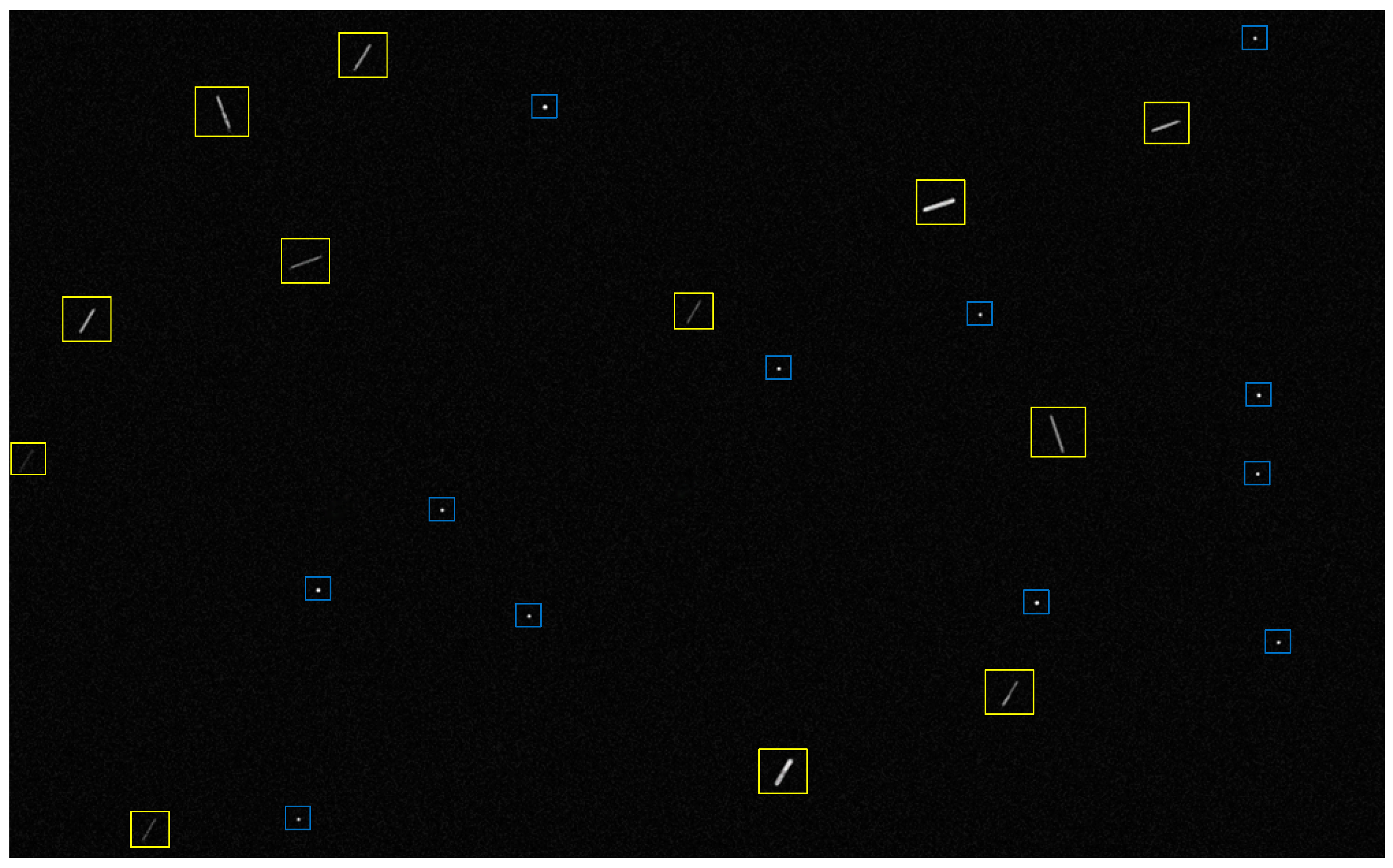
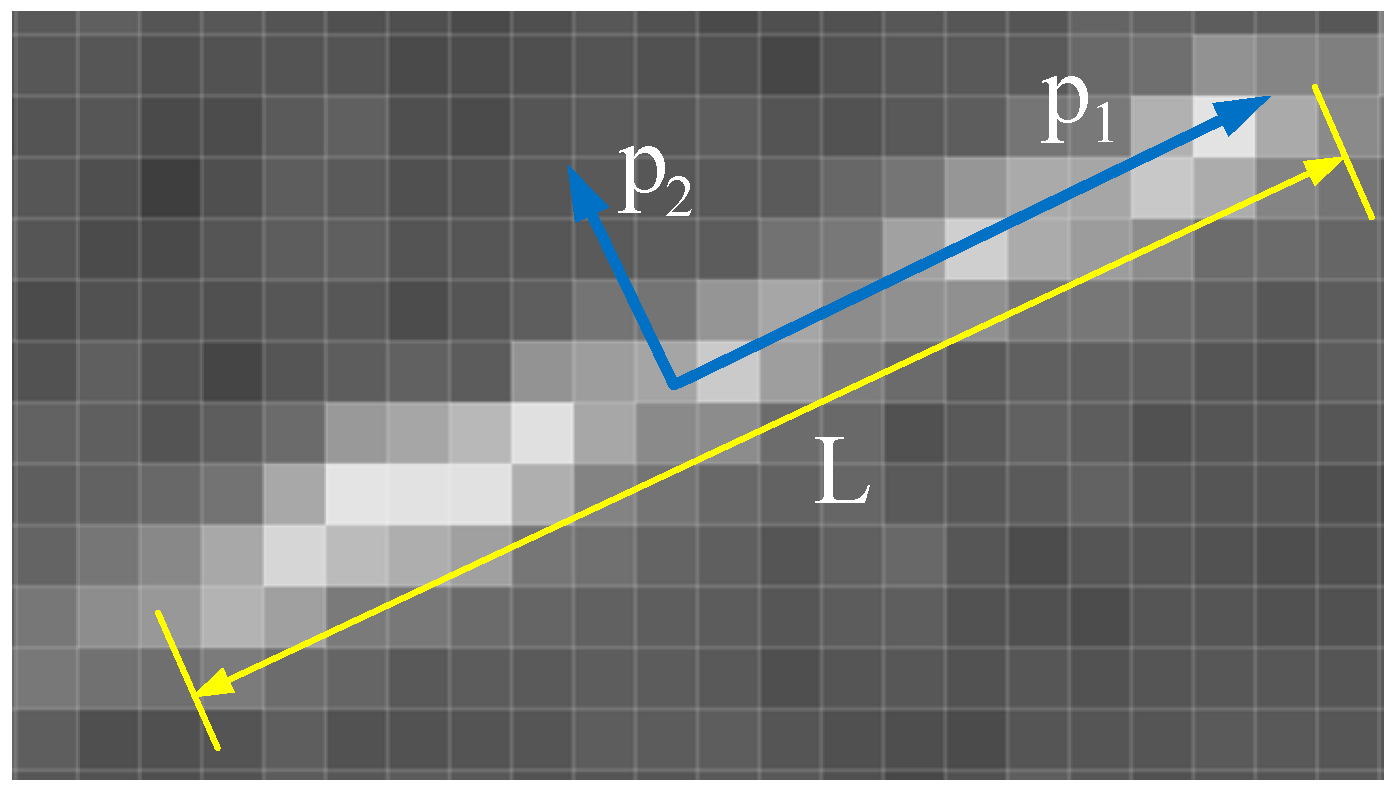
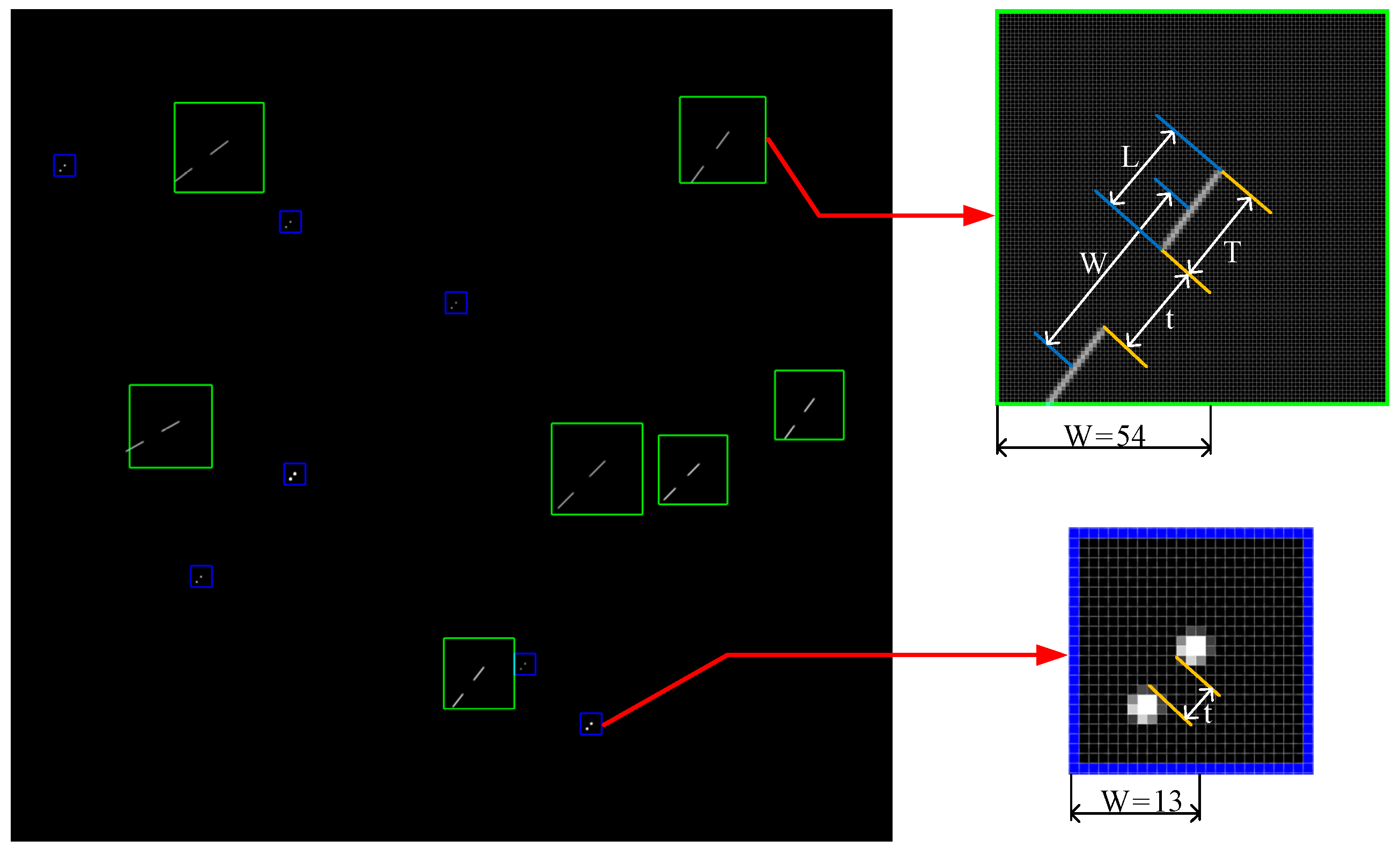
2.1. Star Shape Features Extraction Based on PCA
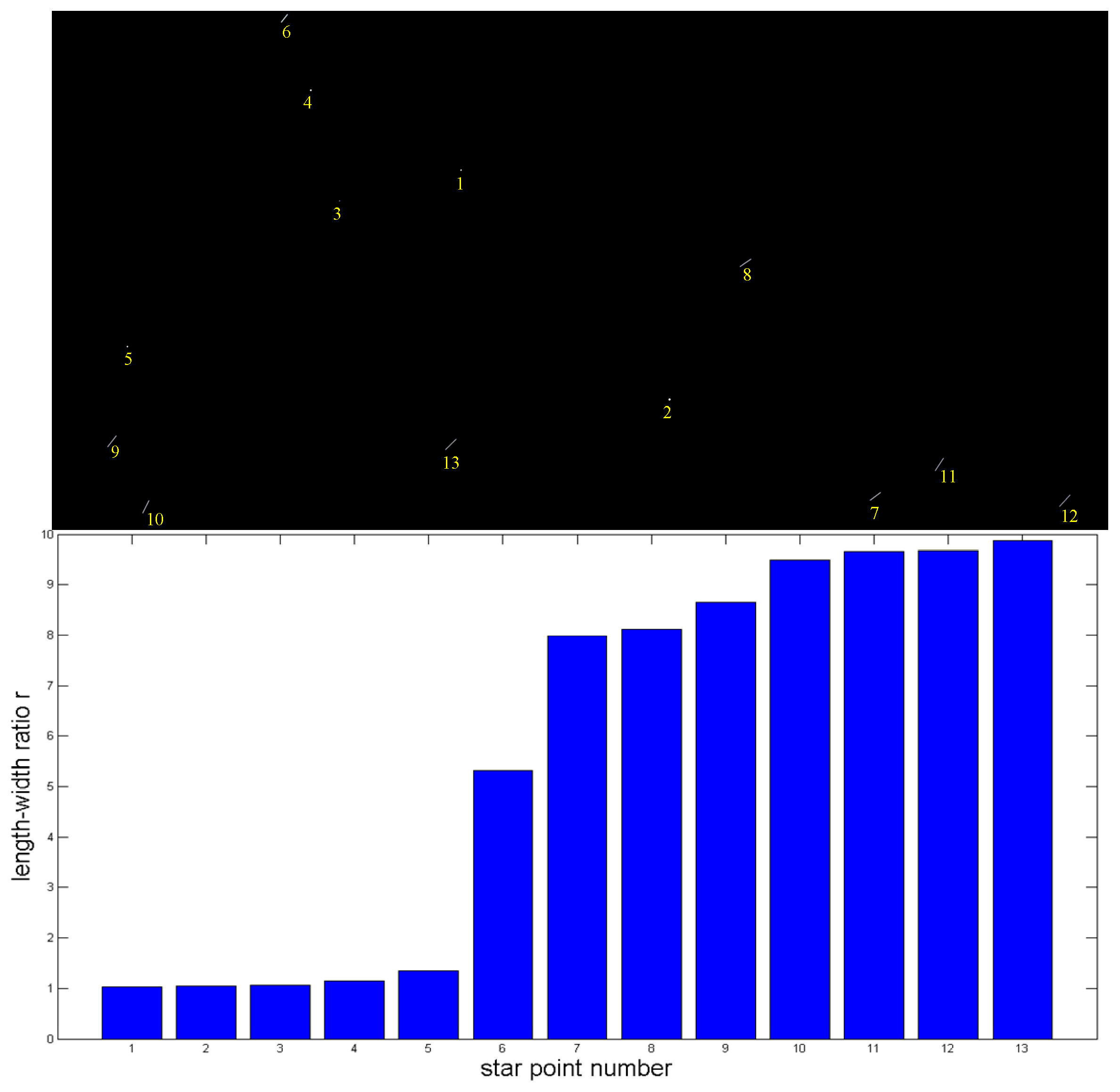
2.2. Evaluate the Authenticity of Star Points Based on Length-Width Ratios
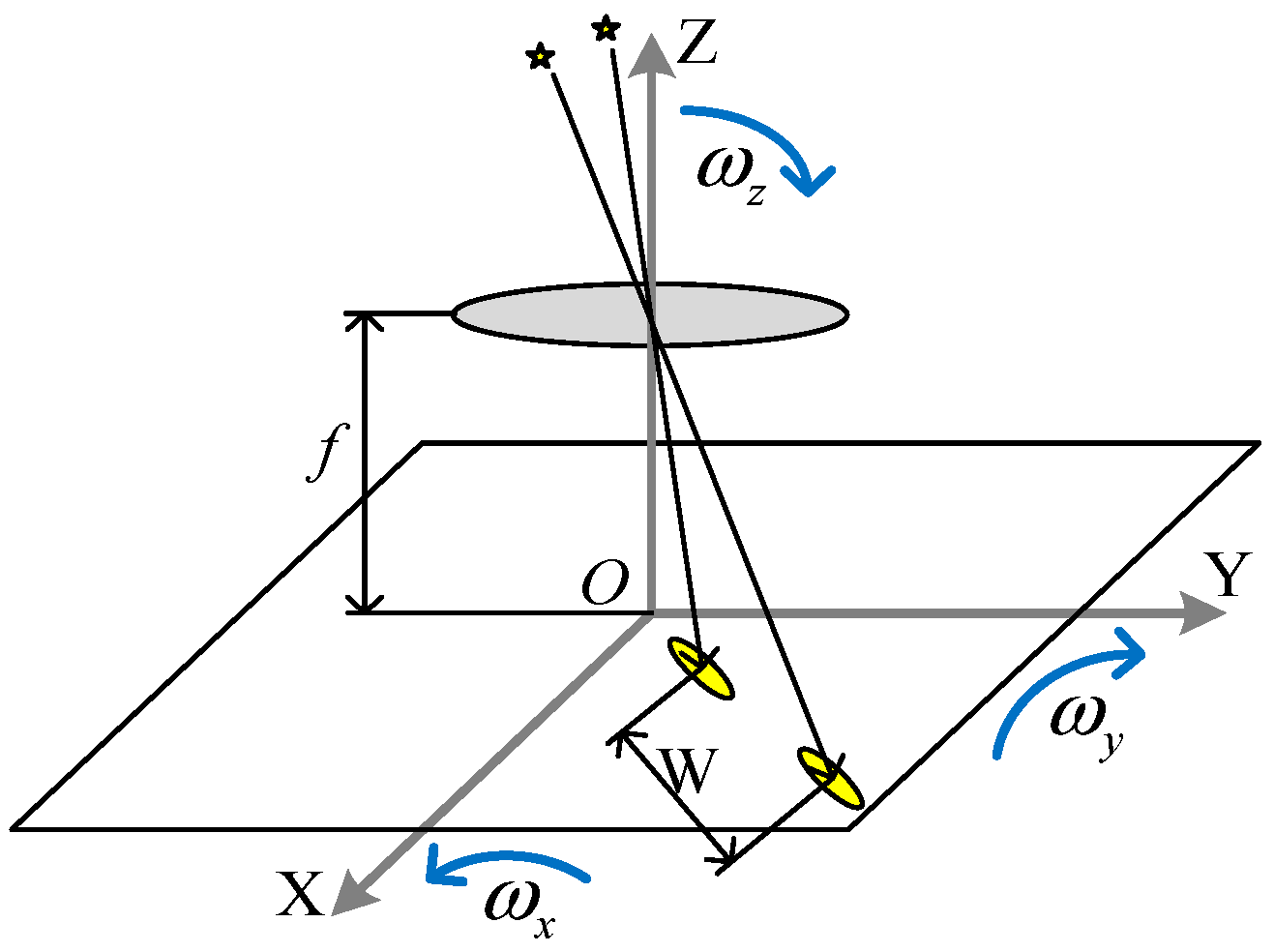
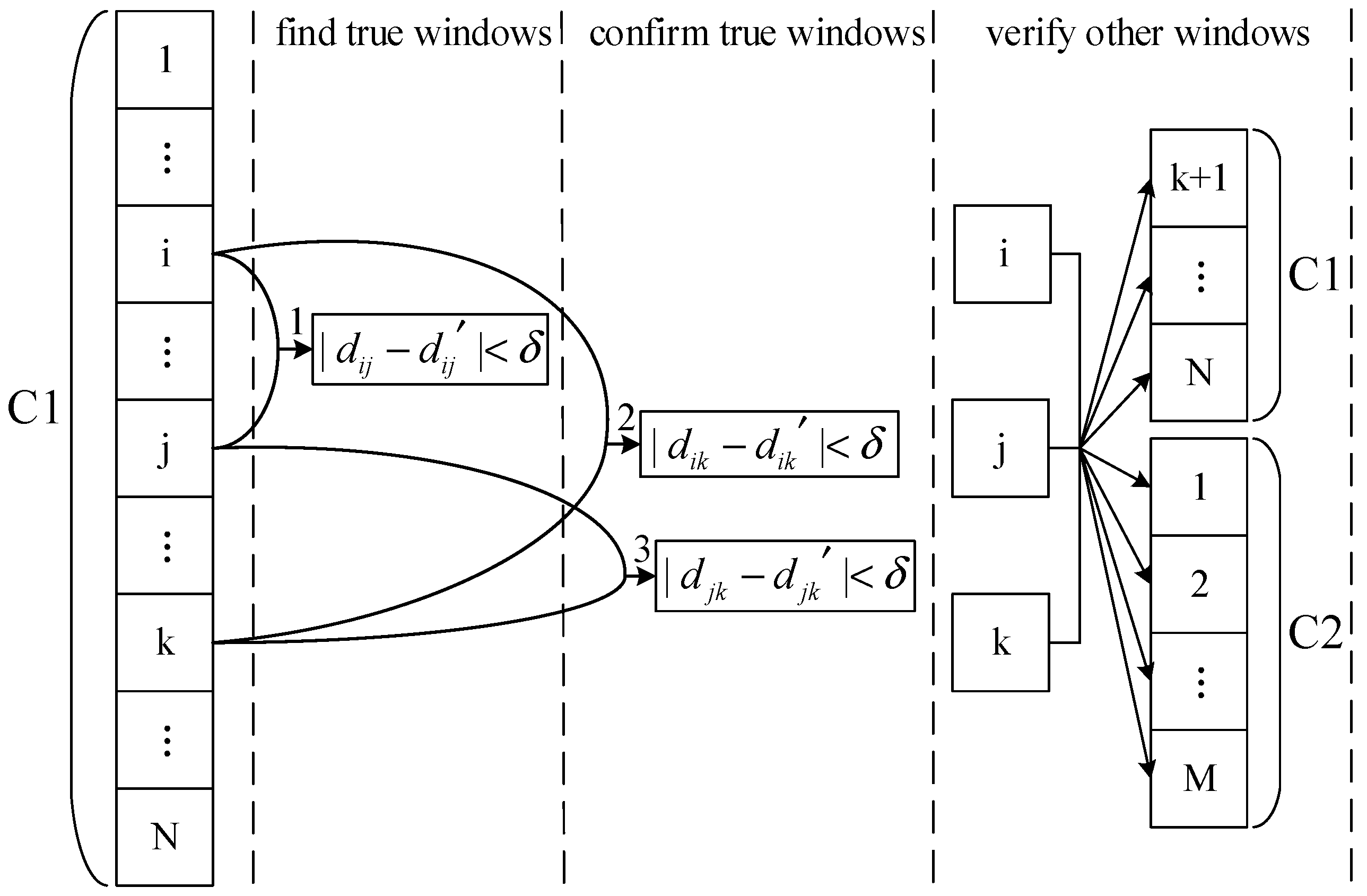
2.3. Accurate Matching of Corresponding Star Points
2.4. Rapid Elimination of Fake Stars
3. Experimental Results and Discussion
3.1. Simulation Experiment
3.1.1. Parameter Selection
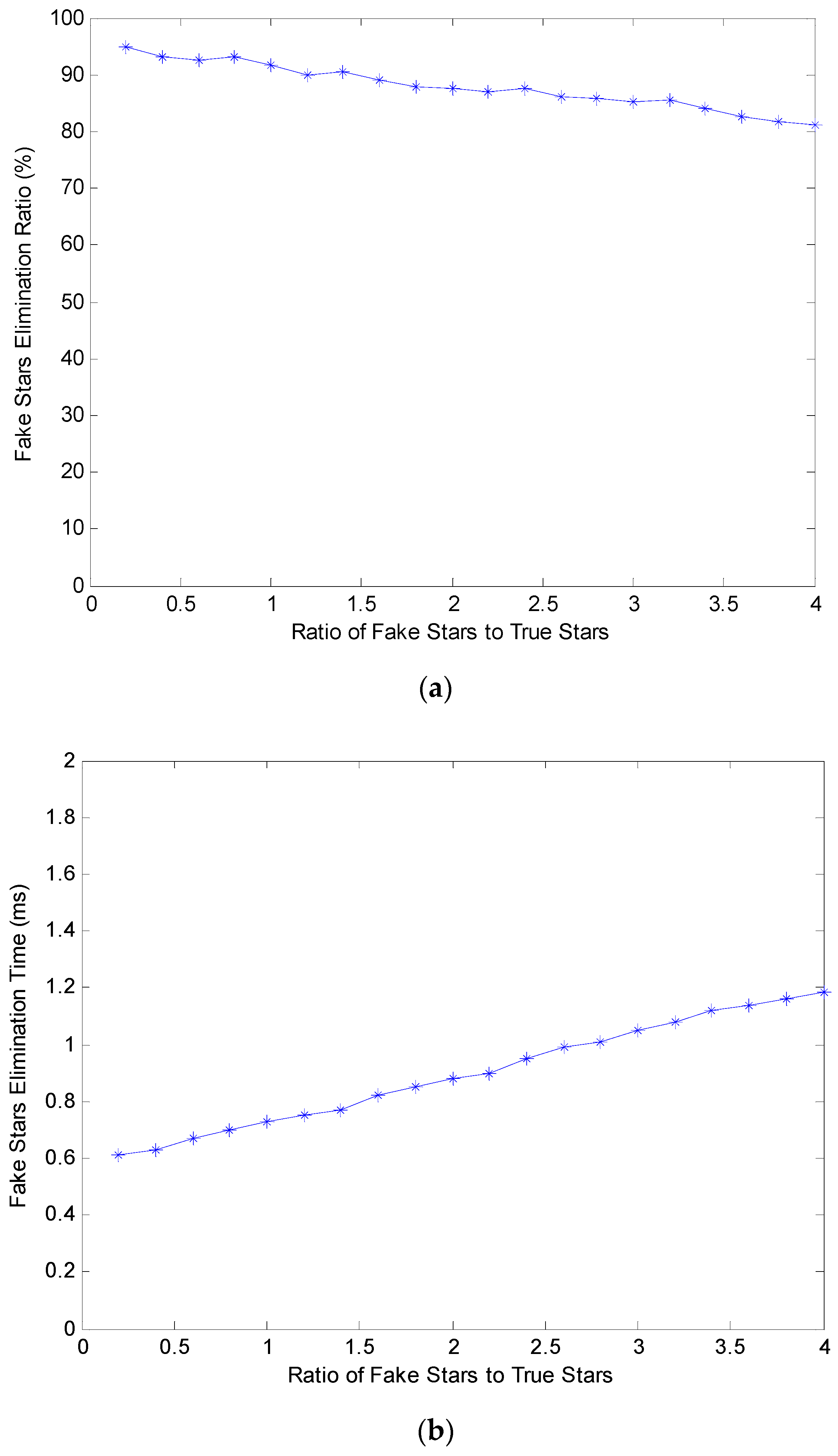
3.1.2. Fake Star Elimination Experiment
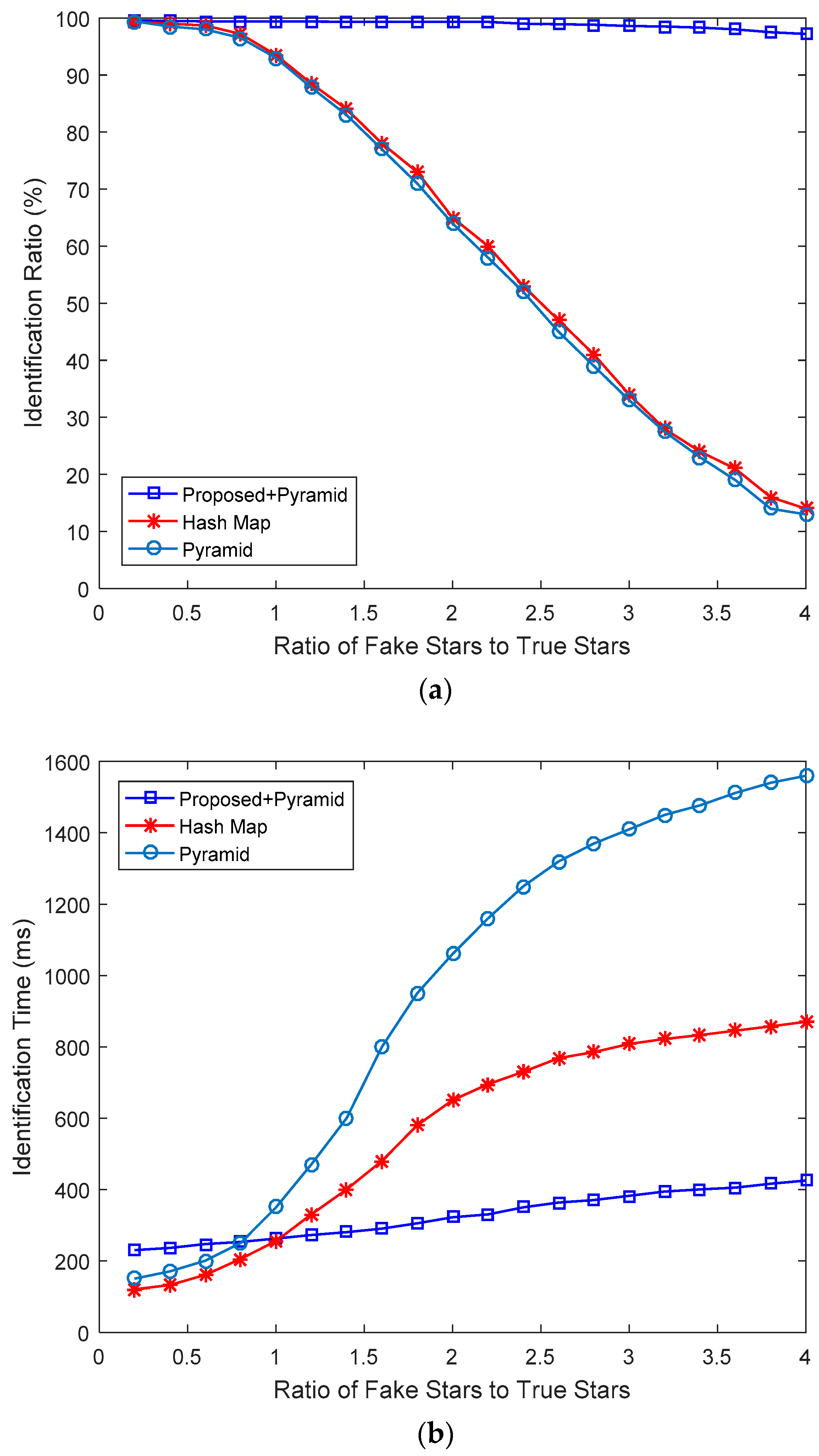
3.1.3. Contrast Experiment
3.2. Experiment on Actual Star Images
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Padgett, C.; Kreutz-Delgado, K. A grid algorithm for autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 202–213. [Google Scholar] [CrossRef]
- Lee, H.; Bang, H. Star pattern identification technique by modified grid algorithm. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1112–1116. [Google Scholar]
- Na, M.; Zheng, D.; Jia, P. Modified grid algorithm for noisy all-sky autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 516–522. [Google Scholar] [CrossRef]
- Liebe, C.C. Pattern recognition of star constellations for spacecraft applications. IEEE Trans. Aerosp. Electron. Syst. 1992, 7, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Mortari, D.; Samaan, M.A.; Bruccoleri, C.; Junkins, J.L. The pyramid star identification technique. Navigation 2004, 51, 171–183. [Google Scholar] [CrossRef]
- Kolomenkin, M.; Pollak, S.; Shimshoni, I.; Lindenbaum, M. Geometric voting algorithm for star trackers. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 441–456. [Google Scholar] [CrossRef]
- Delabie, T.; Durt, T.; Vandersteen, J. Highly robust lost-in-space algorithm based on the shortest distance transform. J. Guid. Control Dyn. 2013, 36, 476–484. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, X.; Li, J.; Wang, G. Star identification algorithm based on K–L transformation and star walk formation. IEEE Sens. J. 2016, 16, 5202–5210. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Wei, X. Generation of guide star catalog for star trackers. IEEE Sens. J. 2018, 18, 4592–4601. [Google Scholar] [CrossRef]
- Ni, Y.; Dai, D.; Tan, W.; Wang, X.; Qin, S. Attitude-correlated frames adding approach to improve signal-to-noise ratio of star image for star tracker. Optics Express 2019, 27, 15548–15564. [Google Scholar] [CrossRef]
- Ma, L.; Zhan, D.; Jiang, G.; Fu, S.; Jia, H.; Wang, X.; Huang, Z.; Zheng, J.; Hu, F.; Wu, W.; et al. Attitude-correlated frames approach for a star sensor to improve attitude accuracy under highly dynamic conditions. Appl. Opt. 2015, 54, 7559–7566. [Google Scholar] [CrossRef]
- Schiattarella, V.; Spiller, D.; Curti, F. A novel star identification technique robust to high presence of false objects: The Multi-Poles Algorithm. Adv. Space Res. 2017, 59, 2133–2147. [Google Scholar] [CrossRef]
- Wang, G.; Li, J.; Wei, X. Star identification based on hash map. IEEE Sens. J. 2018, 18, 1591–1599. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; You, Z.; Wang, X.; Li, B. Smearing model and restoration of star image under conditions of variable angular velocity and long exposure time. Optics Express 2014, 22, 6009–6024. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; You, Z.; Wei, M. Motion-blurred star acquisition method of the star tracker under high dynamic conditions. Optics Express 2013, 21, 20096–20110. [Google Scholar] [CrossRef]
- Fan, Q.; Zhong, X.; Sun, J. A voting-based star identification algorithm utilizing local and global distribution. Acta Astronaut. 2018, 144, 126–135. [Google Scholar] [CrossRef]
- Wang, G.; Lv, W.; Li, J.; Wei, X. False Star Filtering for Star Sensor Based on Angular Distance Tracking. IEEE Access 2019, 7, 62401–62411. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Pearson Education: London, UK, 2007. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Field of view | ∅10° |
| Pixel size | 0.0055 mm |
| Focal length | 64.374 mm |
| Resolution | 2048 × 2048 pixels |
| Max magnitude | 5.5 |
| Parameter | Value |
|---|---|
| Threshold r in Equation (15) | r = 1.6 |
| Angular velocity in Equation (15) | |
| Threshold to judge invariant angular distance |
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| 0.05 | 0.6 | 0.2 | −0.7 | 1.8 | |
| 0.05 | 0.3 | 1.3 | 0.7 | −1.2 | |
| 0 | 0 | 0 | 0 | 0 |
| Average Processing Time | Identification Ratio | |
|---|---|---|
| Proposed + Pyramid | 112 ms | 96% |
| Hash Map | 106 ms | 67% |
| Pyramid | 223 ms | 65% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Q.; Cai, Z.; Wang, G. Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars. Sensors 2019, 19, 3838. https://doi.org/10.3390/s19183838
Fan Q, Cai Z, Wang G. Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars. Sensors. 2019; 19(18):3838. https://doi.org/10.3390/s19183838
Chicago/Turabian StyleFan, Qiaoyun, Zhixu Cai, and Gangyi Wang. 2019. "Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars" Sensors 19, no. 18: 3838. https://doi.org/10.3390/s19183838