A Practical Guide to Source and Receiver Locations for Surface Wave Transmission Measurements across a Surface-Breaking Crack in Plate Structures


Abstract
:1. Introduction
2. Method
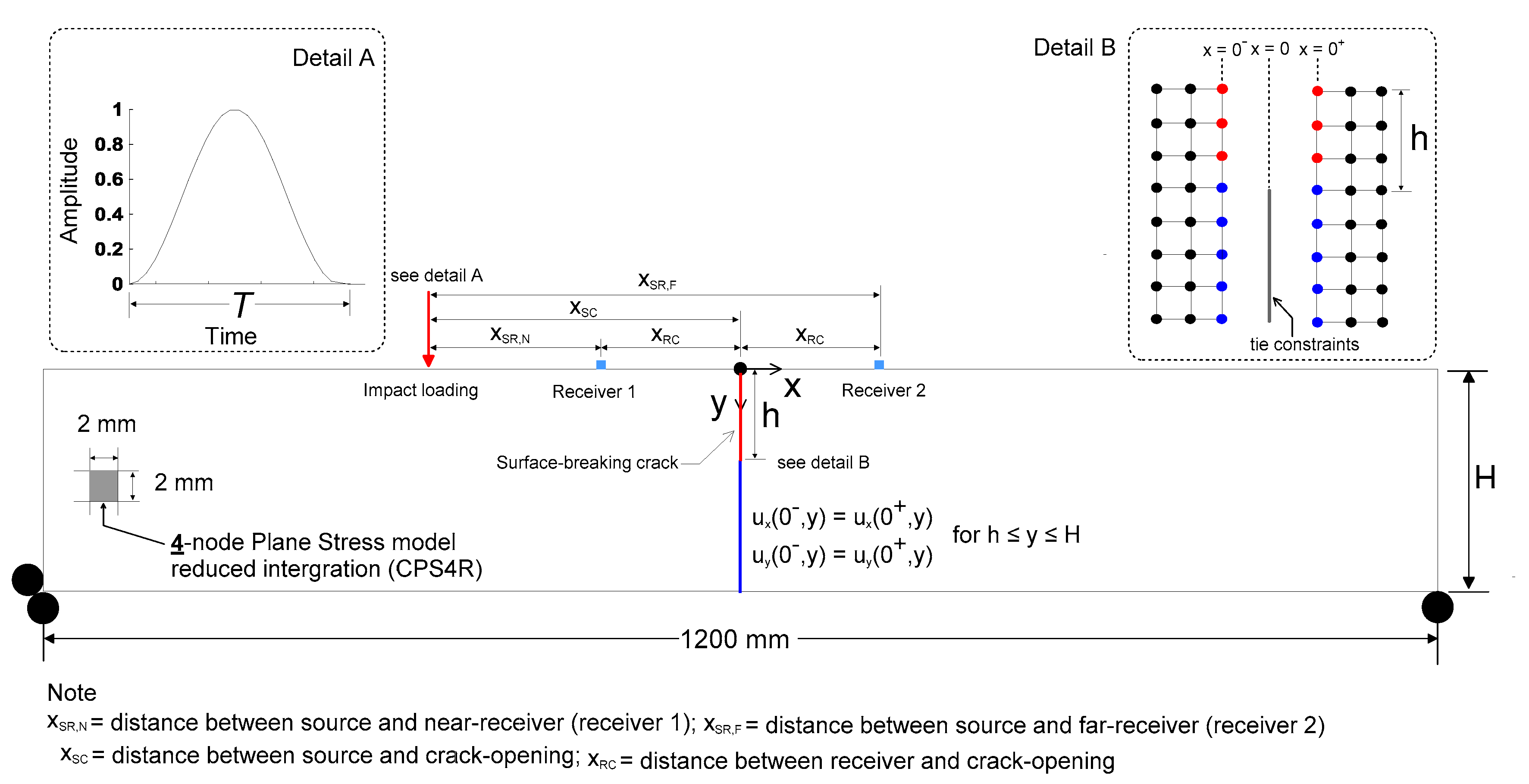
2.1. Numerical Simulation Using FEM
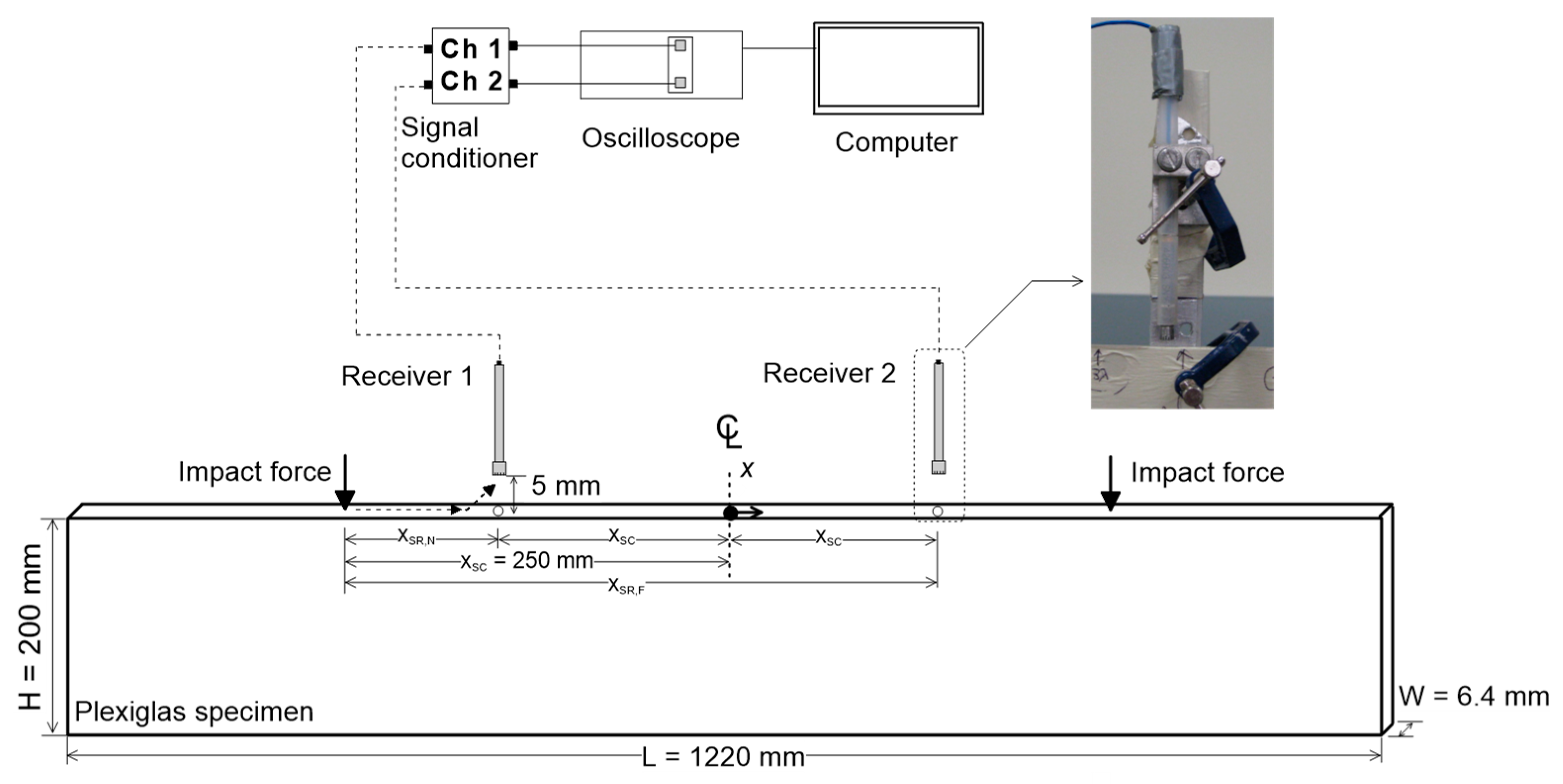
2.2. Experiments: SWT Measurements in Plexiglas Specimens
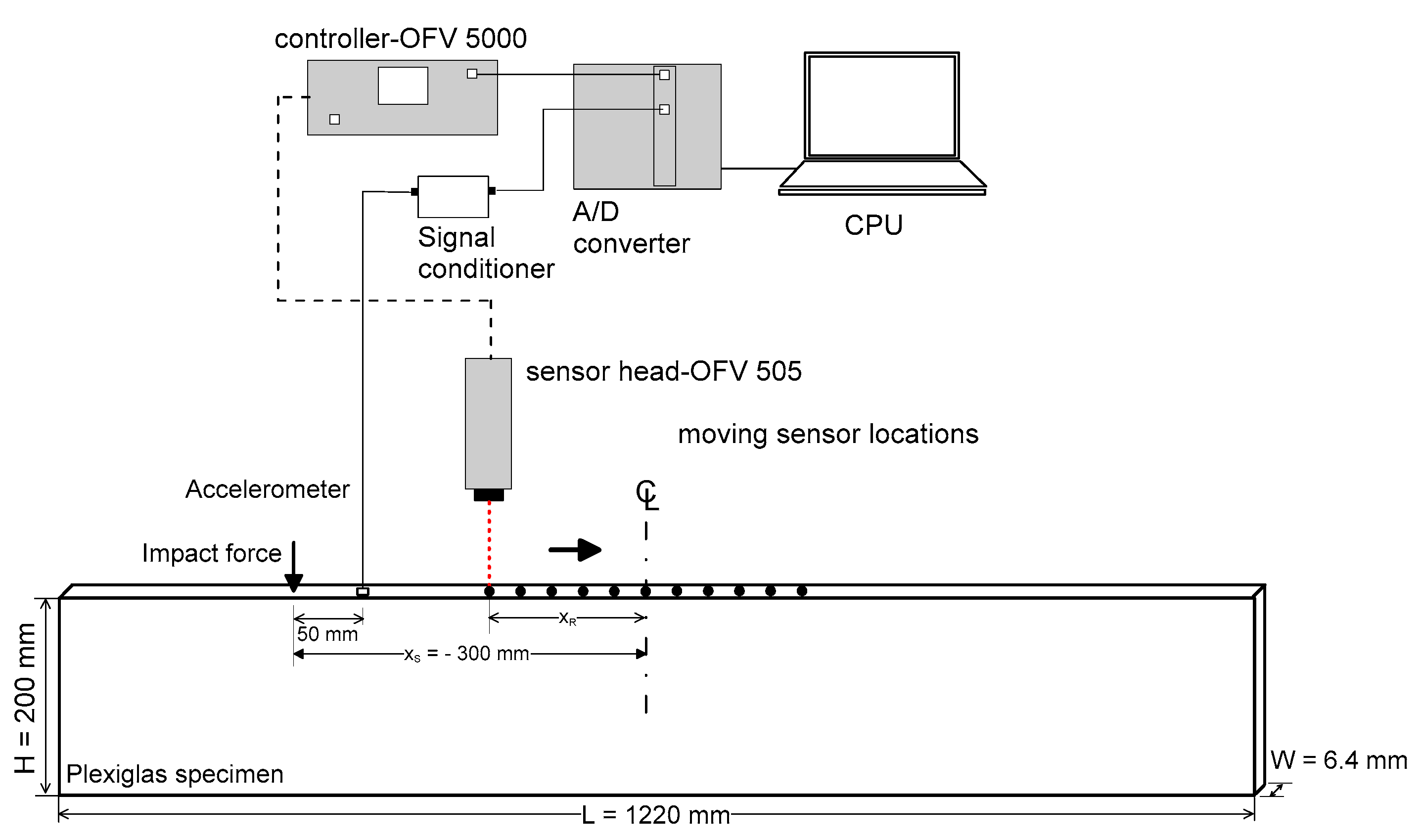
2.2.1. Test Specimen
2.2.2. Test Setup, Data Acquisition and Signal Processing for the SWT Measurements
3. Result and Discussion
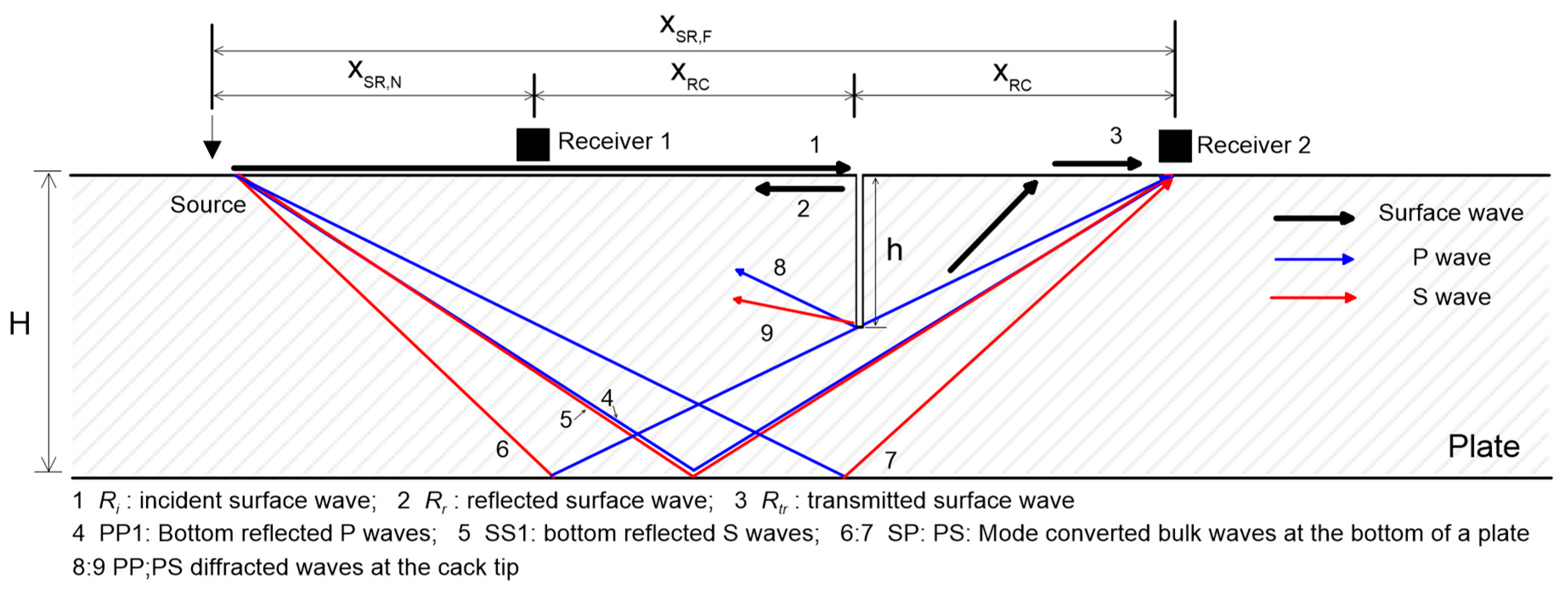
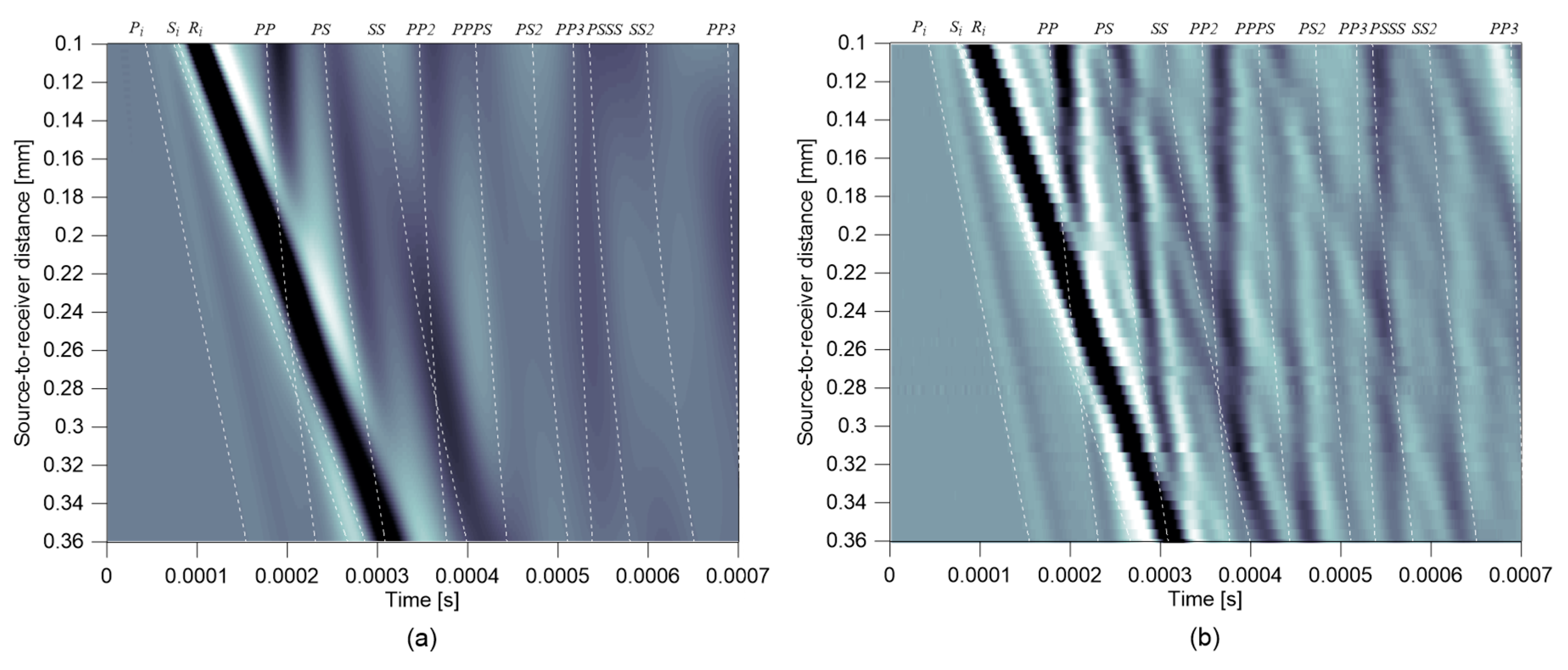
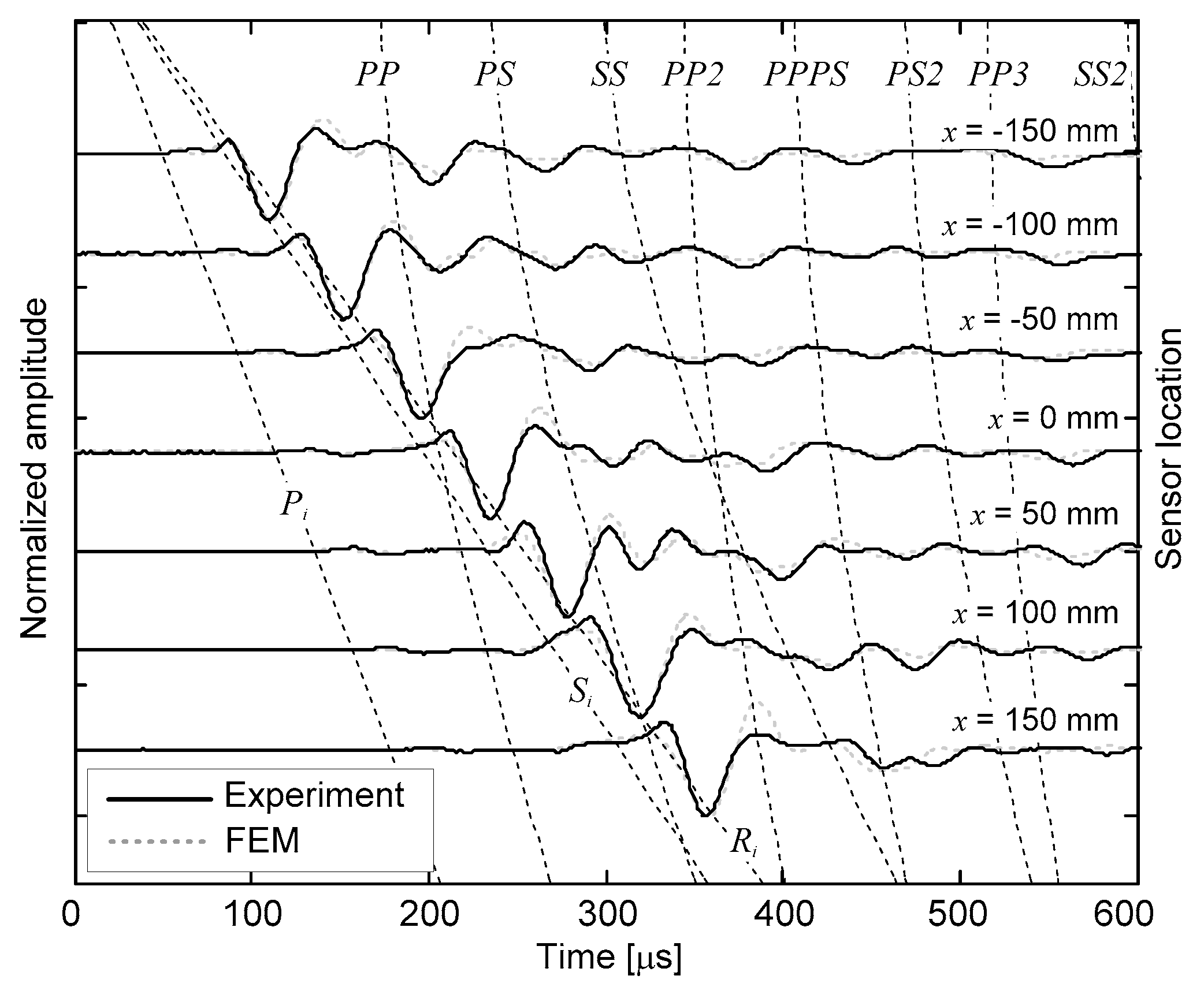
3.1. Interaction of Surface Waves and Multiple Bottom Reflected Waves
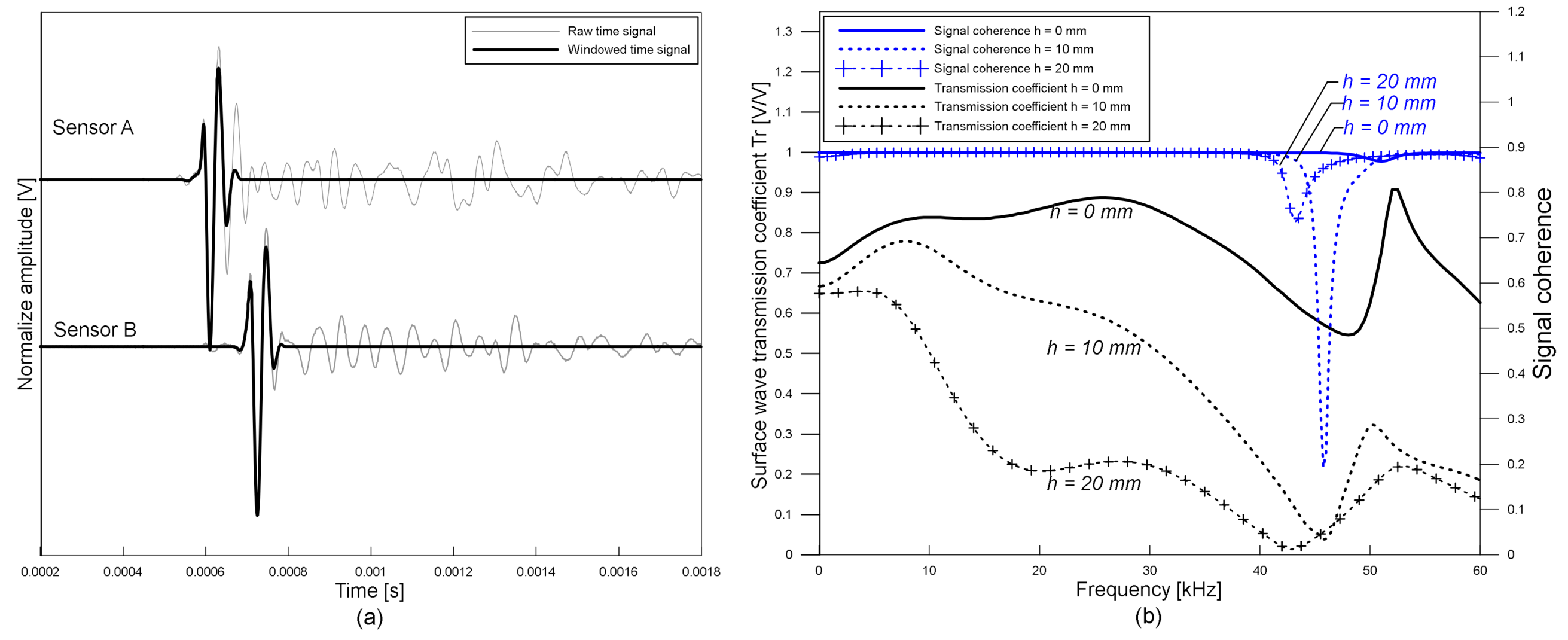
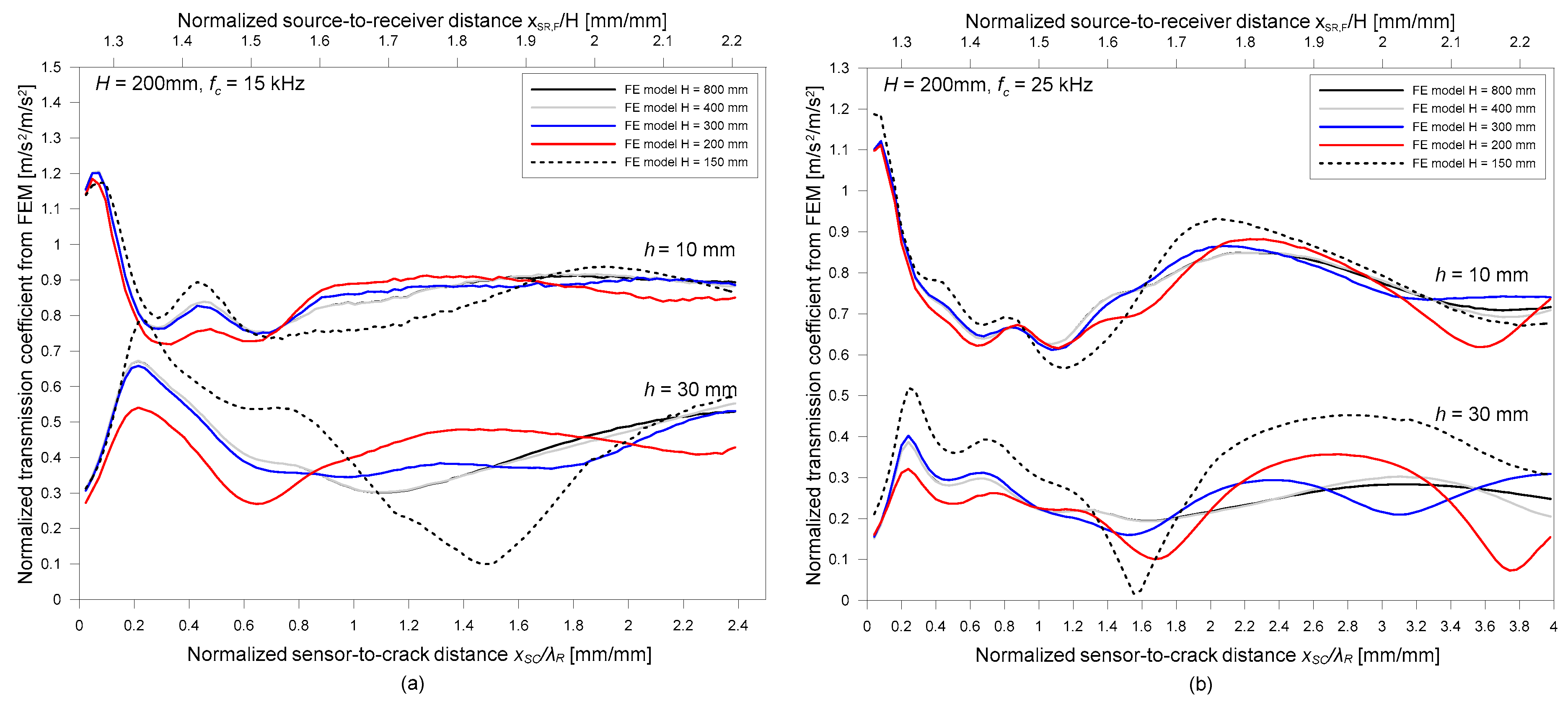
3.2. Effect of Bottom Reflected Waves on Trn
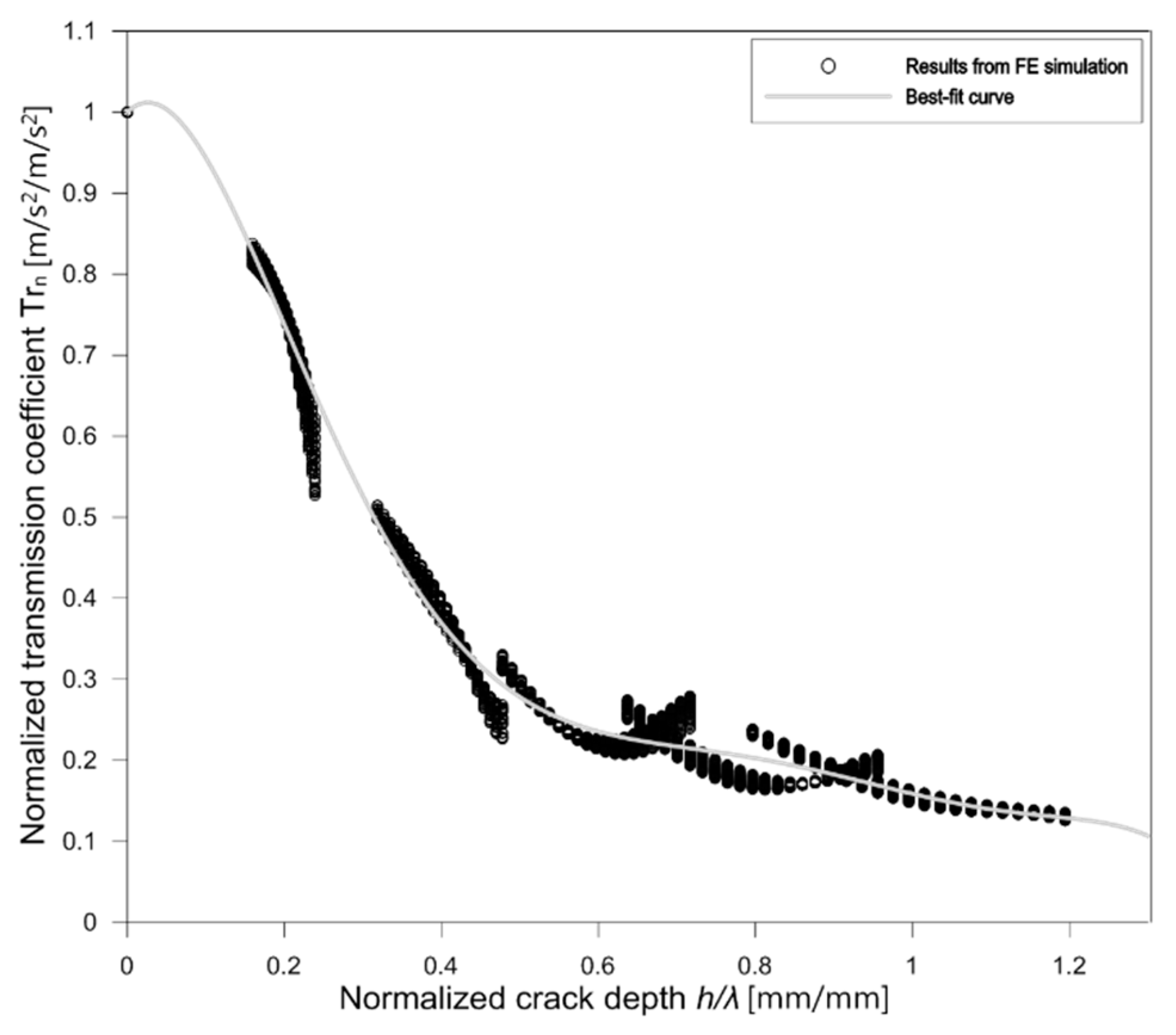
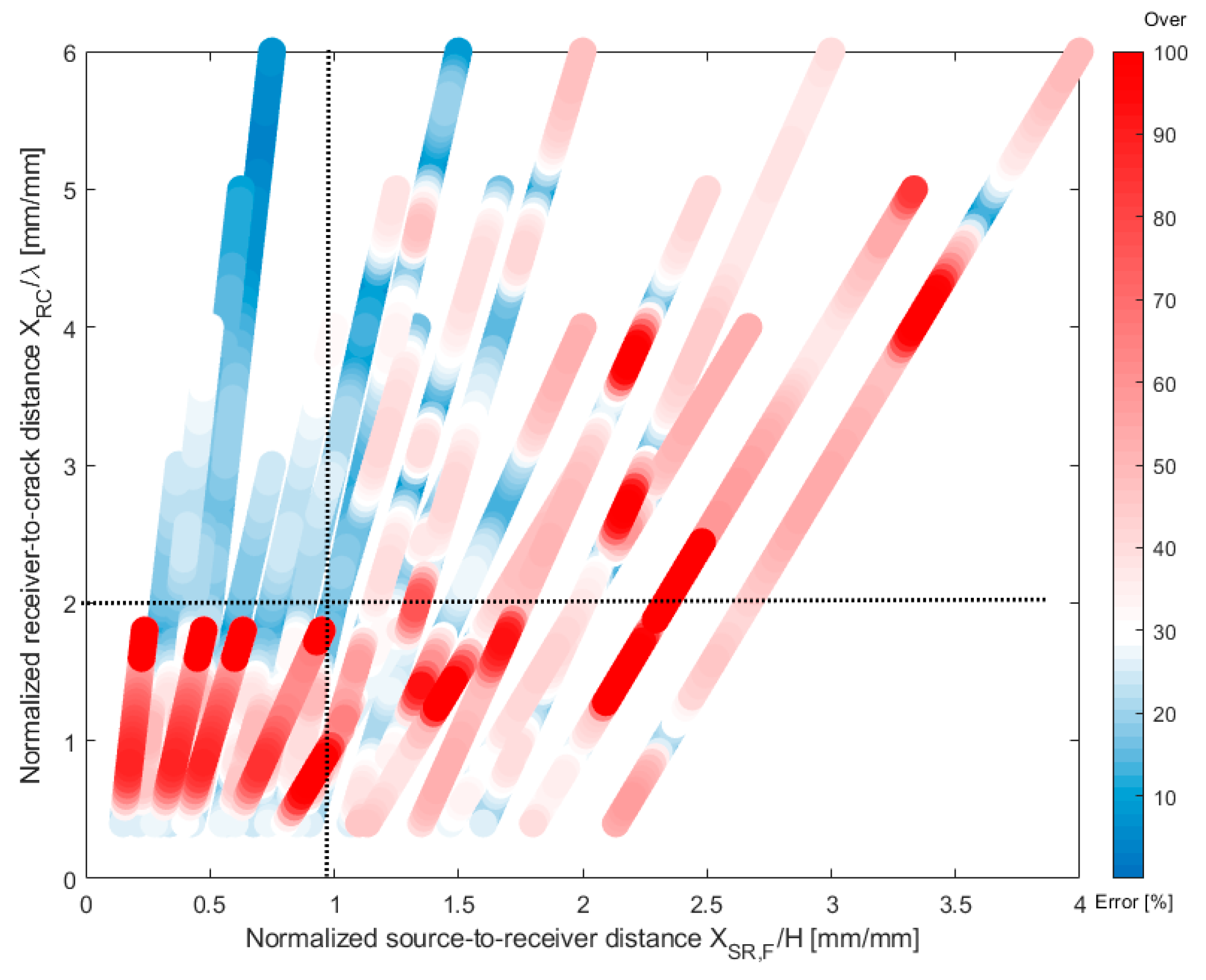
3.3. Effect of Bottom Reflected Waves on Crack Depth Estimation
4. Summary and Conclusions
- Consistent with previous research based on the half-space assumption, the transmission coefficient of surface waves in a plate could be significantly enhanced, and the values are sensitive to the location of receivers from crack-opening, which is known as the near-field scattering effect in the SWT measurements. It has been demonstrated in the literature that the near-field effect could be reasonably suppressed when the receivers are located far enough from crack opening (e.g., 2λR). However, results based on experiments and numerical simulations in this study exhibit that the approximate far-field criterion based on the half-space assumption is only valid when the effect of bottom reflected bulk waves is not significant.
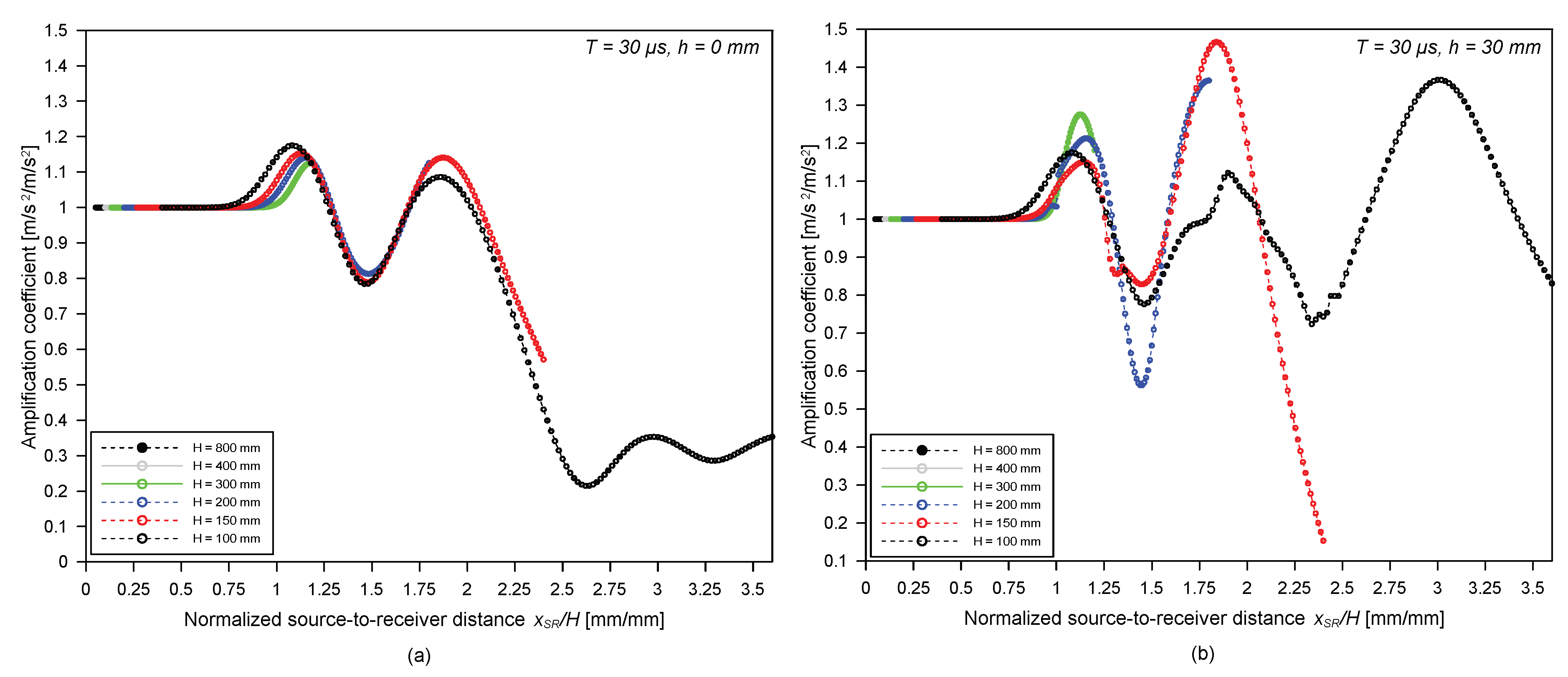
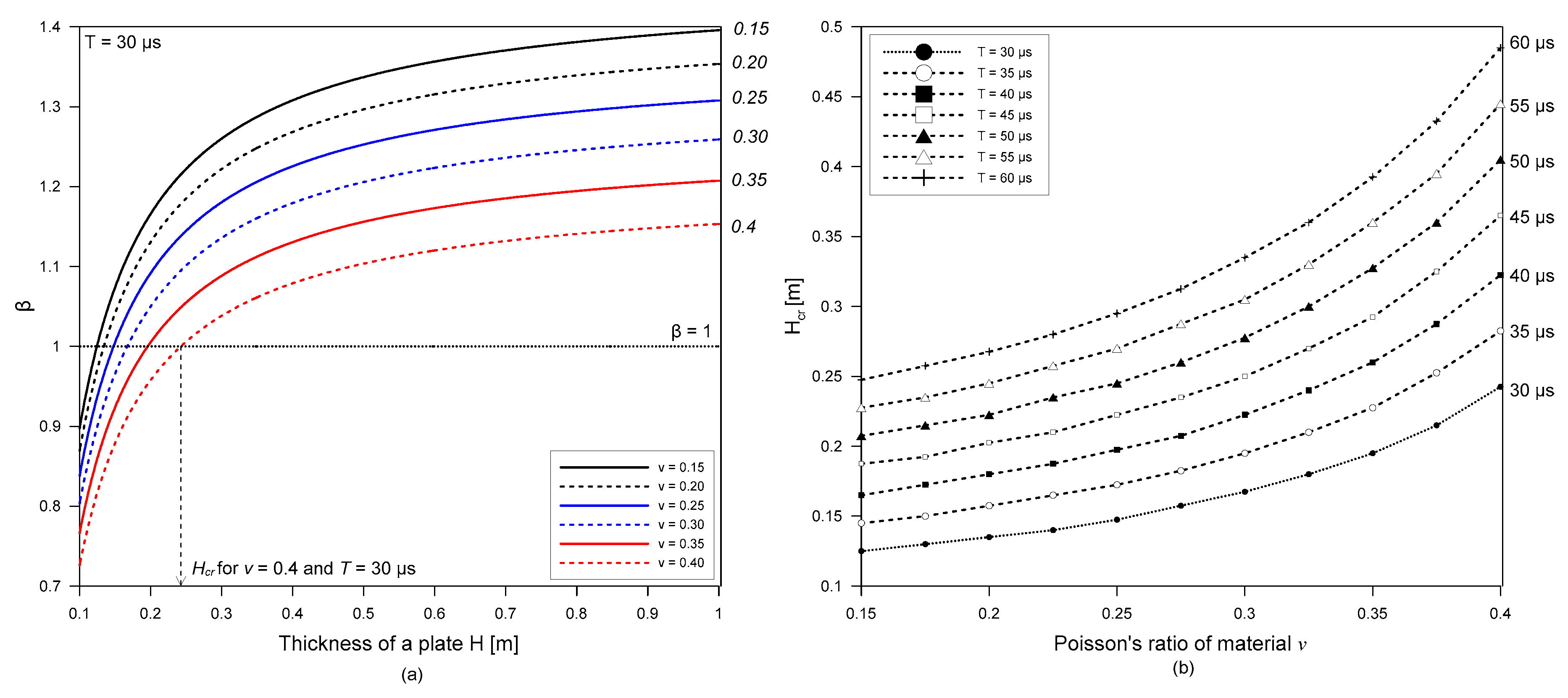
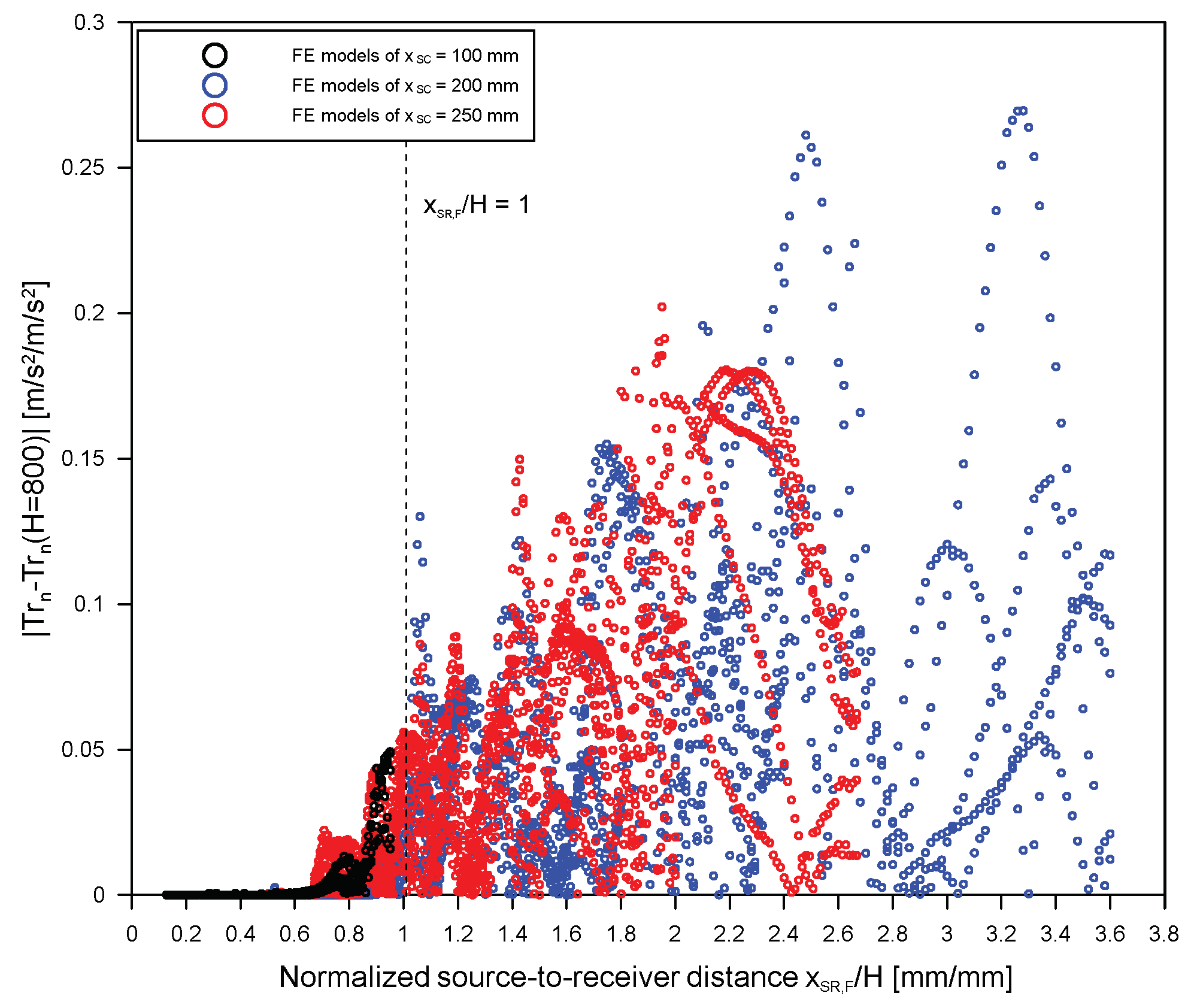
- It is recommended in this study that a receiver should be placed not farther than the thickness of a plate from an impact source to reasonably suppress the interference of surface waves and bottom reflected bulk waves in a plate. Please note that this simplified rule; however, may not be effective for the application to relatively thin plate with a thickness less than a critical thickness, Hcr, which is dependent on Poisson’s ratio and the wavelength of surface waves λR. An approximate equation relating the normalized critical thickness, Hcr/λR (critical thickness normalized by wavelength of surface waves) and Poisson’s ratio of materials, v, was established in this study.
- It was verified from a series of FE simulations that the practical guideline to source-to-receiver locations and receiver-to-crack locations are effective to obtain reliable and consistent crack depth estimation by the surface wave transmission measurements in a plate.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
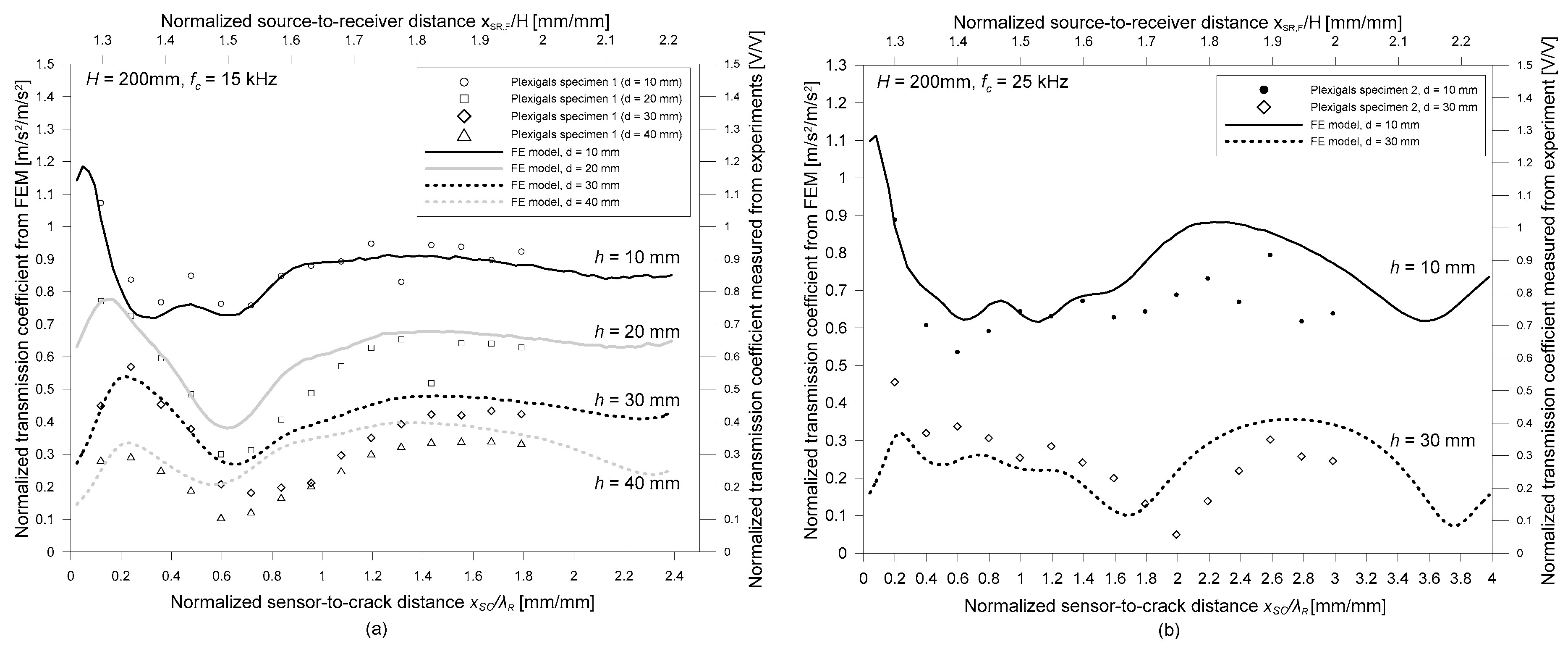
Appendix A Validation of FE model by a Comparison with Experiments in Plexiglas Specimen


References
- Achenbach, J.D.; Brind, R.J. Scattering of surface waves by a sub-surface crack. J. Sound Vib. 1981, 76, 43–56. [Google Scholar] [CrossRef]
- Angel, Y.C.; Achenbach, J.D. Reflection and transmission of obliquely incident Rayleigh waves by a surface-breaking crack. J. Acoust. Soc. Am. 1984, 75, 313–319. [Google Scholar] [CrossRef]
- Popovics, J.S.; Song, W.-J.; Ghandehari, M.; Subramaniam, K.V.; Achenbach, J.D.; Shah, S.P. Application of surface wave transmission measurements for crack depth determination in concrete. ACI Mater. J. 2000, 97, 127–135. [Google Scholar]
- Song, W.-J.; Popovics, J.S.; Aldrin, J.C.; Shah, S.P. Measurement of surface wave transmission coefficient across surface-breaking cracks and notches in concrete. J. Acoust. Soc. Am. 2003, 113, 717–725. [Google Scholar] [CrossRef] [PubMed]
- Masserey, B.; Mazza, E. Analysis of the near-field ultrasonic scattering at a surface crack. J. Acoust. Soc. Am. 2005, 118, 3585–3594. [Google Scholar] [CrossRef]
- Achenbach, J.D.; Keer, L.M.; Mendelsohn, D.A. Elastodynamic Analysis of an Edge Crack. J. Appl. Mech. 1980, 47, 551–556. [Google Scholar] [CrossRef]
- Mendelsohn, D.A.; Achenbach, J.D.; Keer, L.M. Scattering of elastic waves by a surface-breaking crack. Wave Motion 1980, 2, 277–292. [Google Scholar] [CrossRef]
- Cheng, A.; Achenbach, J.D. A roller device to scan for surface-breaking cracks and to determine crack depth by a self-calibrating ultrasonic technique. Res. Nondestr. Eval. 1996, 7, 185–194. [Google Scholar] [CrossRef]
- Hirao, M.; Fukuoka, H.; Miura, Y. Scattering of Rayleigh surface-saves by edge cracks: Numerical simulation and experiment. J. Acoust. Soc. Am. 1982, 72, 602–606. [Google Scholar] [CrossRef]
- Masserey, B.; Fromme, P. On the reflection of coupled Rayleigh-like waves at surface defects in plates. J. Acoust. Soc. Am. 2008, 123, 88–98. [Google Scholar] [CrossRef]
- Hevin, G.; Abraham, O.; Petersen, H.A.; Campillo, M. Characterization of surface cracks with Rayleigh waves: A numerical model. NDT E Int. 1998, 31, 289–298. [Google Scholar] [CrossRef]
- Kee, S.H.; Zhu, J. Using air-coupled sensors to determine the depth of a surface-breaking crack in concrete. J. Acoust. Soc. Am. 2010, 127, 1279–1287. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kee, S.-H.; Zhu, J. Effects of sensor locations on air-coupled surface wave transmission measurements. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 427–436. [Google Scholar] [PubMed]
- Jian, X.; Dixon, S.; Guo, N.; Edwards, R. Rayleigh wave interaction with surface-breaking cracks. J. Appl. Phys. 2007, 101, 064906. [Google Scholar] [CrossRef]
- Edwards, R.S.; Jian, X.; Fan, Y.; Dixon, S. Signal enhancement of the in-plane and out-of plane Rayleigh wave components. Appl. Phys. Lett. 2005, 87, 194104–194106. [Google Scholar] [CrossRef]
- Blackshire, J.L.; Sathish, S. Near-field ultrasonic scattering from surface-breaking cracks. Appl. Phys. Lett. 2002, 80, 3442–3444. [Google Scholar] [CrossRef]
- Yew, C.H.; Chen, K.G.; Wang, D.L. An experimental study of interaction between surface waves and a surface breaking crack. J. Acoust. Soc. Am. 1984, 75, 189–196. [Google Scholar]
- Kee, S.-H. Evaluation of Crack-Depth in Concrete using Non-contact Surface Wave Transmission Measurement. In Department of Civil; Texas ScholarWorks: Austin, TX, USA, 2011. [Google Scholar]
- Alleyne, D.N.; Cawley, P. A Two-Dimensional Fourier Transform Method for the Measurement of Propagating Multimode Signals. J. Acoust. Soc. Am. 1991, 89, 1159–1168. [Google Scholar] [CrossRef]
- Kee, S.-H.; Gucunski, N. Use of Surface Wave Measurements to Characterize Surface-Breaking Cracks in Concrete Bridge Decks. Transp. Res. Rec. 2014, 240, 3–11. [Google Scholar] [CrossRef]
- Zerwer, A.; Cascante, G.; Hutchinson, J. Parameter Estimation in Finite Element Simulations of Rayleigh Waves. J. Geotech. Geoenviron. Eng. 2002, 128, 250–261. [Google Scholar] [CrossRef]
- Kim, J.H.; Kwak, H.-G. Nondestructive evaluation of elastic properties of concrete using simulation of surface waves. Comput. Aided Civ. Infrastruct. Eng. 2008, 23, 611–624. [Google Scholar] [CrossRef]
- Graff, K.F. Wave Motion in Elastic Solids., 4th ed.; Courier Corporation: North Chelmsford, MA, USA, 1991. [Google Scholar]
- Achenbach, J.D.; Komsky, I.N.; Lee, Y.C.; Angel, Y.C. Self-calibrating ultrasonic technique for crack depth measurement. J. Nondestr. Eval. 1992, 11, 103–108. [Google Scholar] [CrossRef]
- Gibson, A. Advances in Nondestructive Testing of Concrete Pavements. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2004. [Google Scholar]
- Kearey, P.; Brooks, M.; Hill, I. An Introduction to Geophysical Exploration; Blackwell Publishing: Hoboken, NJ, USA, 2002. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| v | E (GPa) | ρ (kg/m3) | H (mm) | H (mm) | xsc (mm) | T (μs) |
|---|---|---|---|---|---|---|
| 0.33 | 5.8 | 1200 | 100, 150, 200, 300, 400, 800 | 0, 10, 20, 30, 40, 50 | 100, 150,200, 250, 300 | 30 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Kee, S.-H.; Lee, J.-W.; Candelaria, M.D. A Practical Guide to Source and Receiver Locations for Surface Wave Transmission Measurements across a Surface-Breaking Crack in Plate Structures. Sensors 2019, 19, 3793. https://doi.org/10.3390/s19173793
Kim J, Kee S-H, Lee J-W, Candelaria MD. A Practical Guide to Source and Receiver Locations for Surface Wave Transmission Measurements across a Surface-Breaking Crack in Plate Structures. Sensors. 2019; 19(17):3793. https://doi.org/10.3390/s19173793
Chicago/Turabian StyleKim, Janghwan, Seong-Hoon Kee, Jin-Wook Lee, and Ma. Doreen Candelaria. 2019. "A Practical Guide to Source and Receiver Locations for Surface Wave Transmission Measurements across a Surface-Breaking Crack in Plate Structures" Sensors 19, no. 17: 3793. https://doi.org/10.3390/s19173793