User Identification from Gait Analysis Using Multi-Modal Sensors in Smart Insole


Abstract
:1. Introduction
2. Data Acquisition and Preprocessing
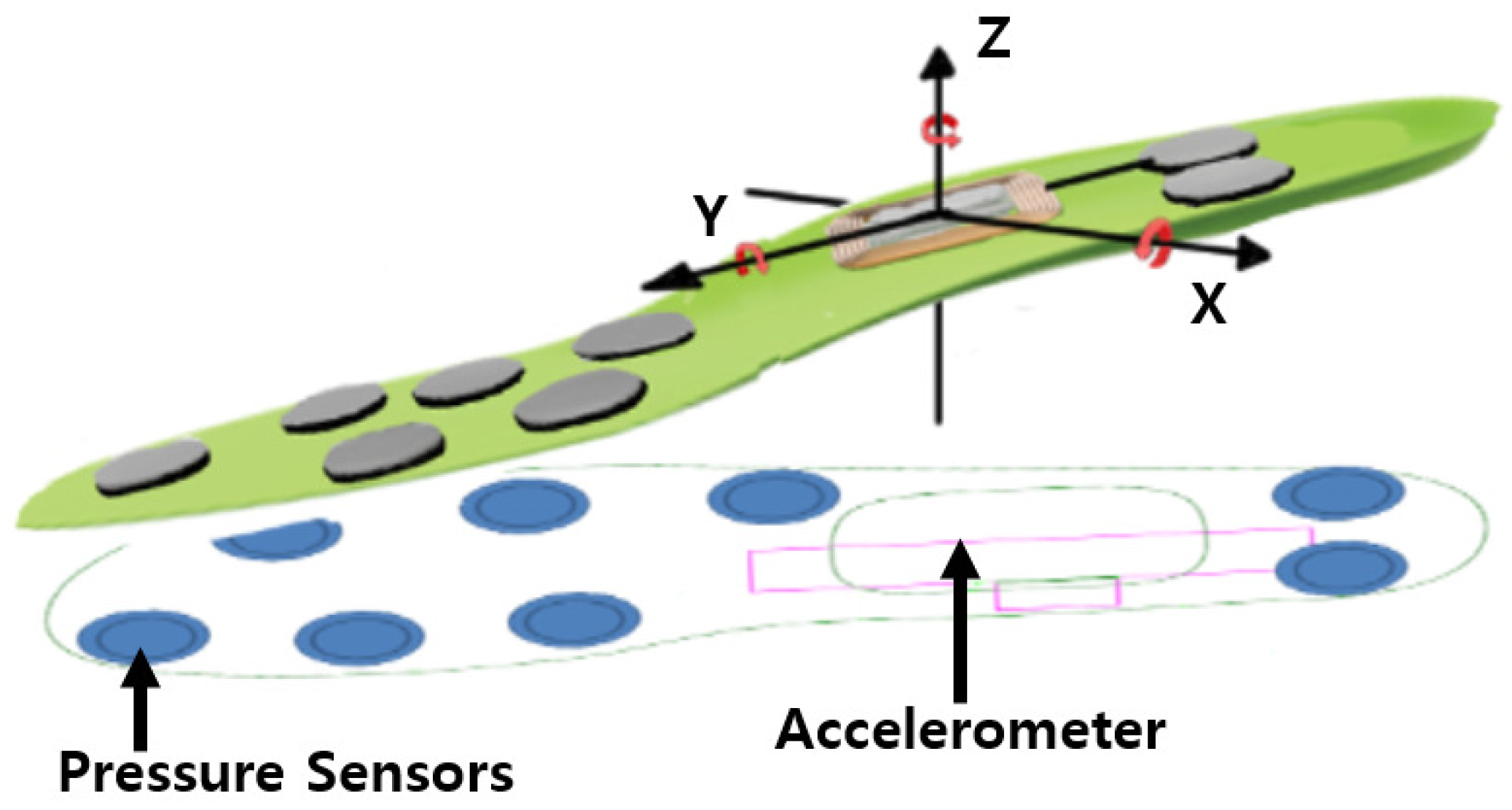
2.1. Gait Data Acquisition
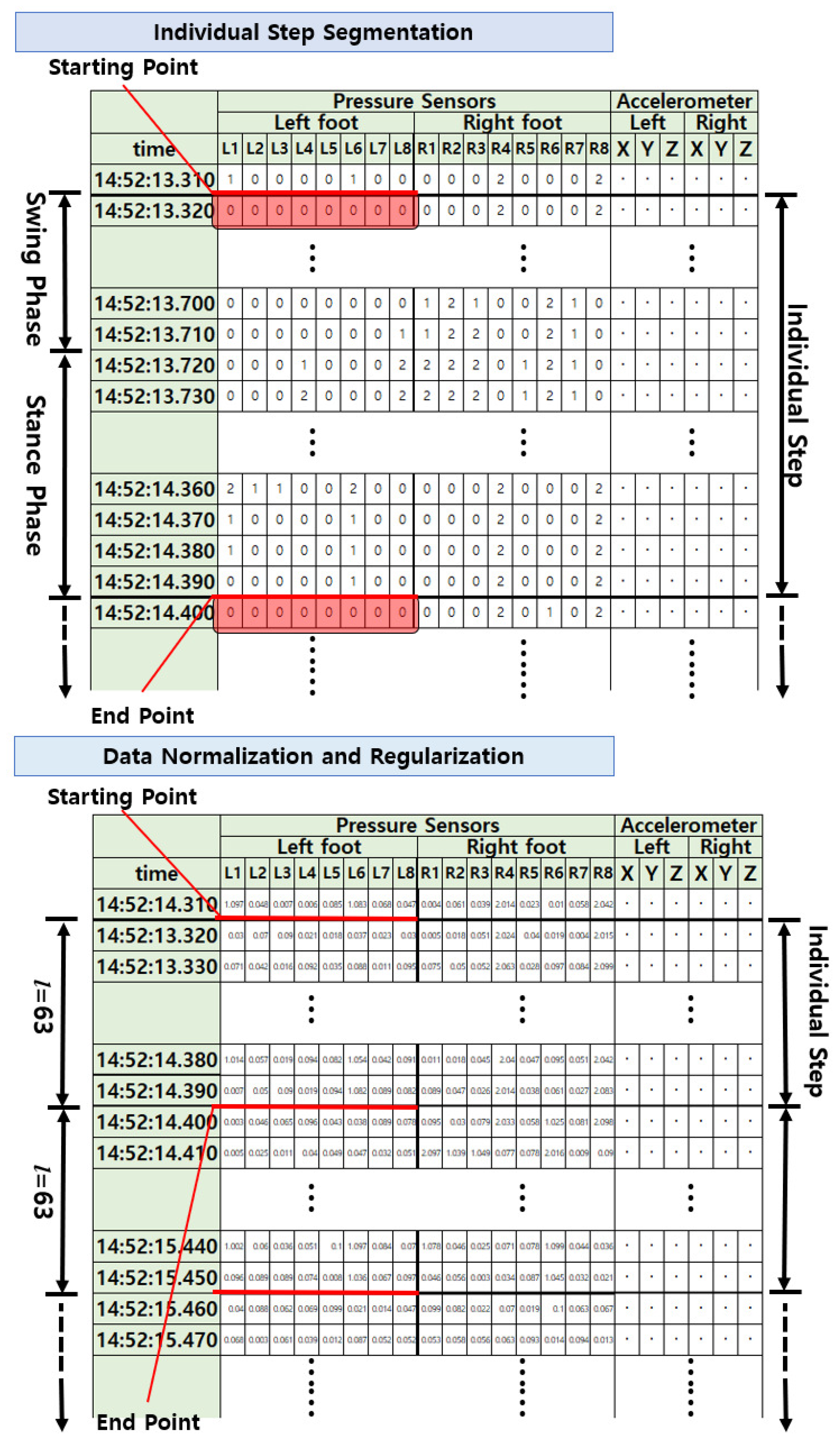
2.2. Data Normalization and Regularization
3. Multi-Modal Features for Identification
3.1. Discriminant Feature Extraction
3.2. Multi-Modal Feature Vector Construction
- Data measured from pressure sensors and accelerometers corresponding to continuous walking were divided into individual steps based on the swing phase determined from pressure data.
- Data normalization was performed for every individual step to have the same time length, and regularization was performed for discriminant analysis.
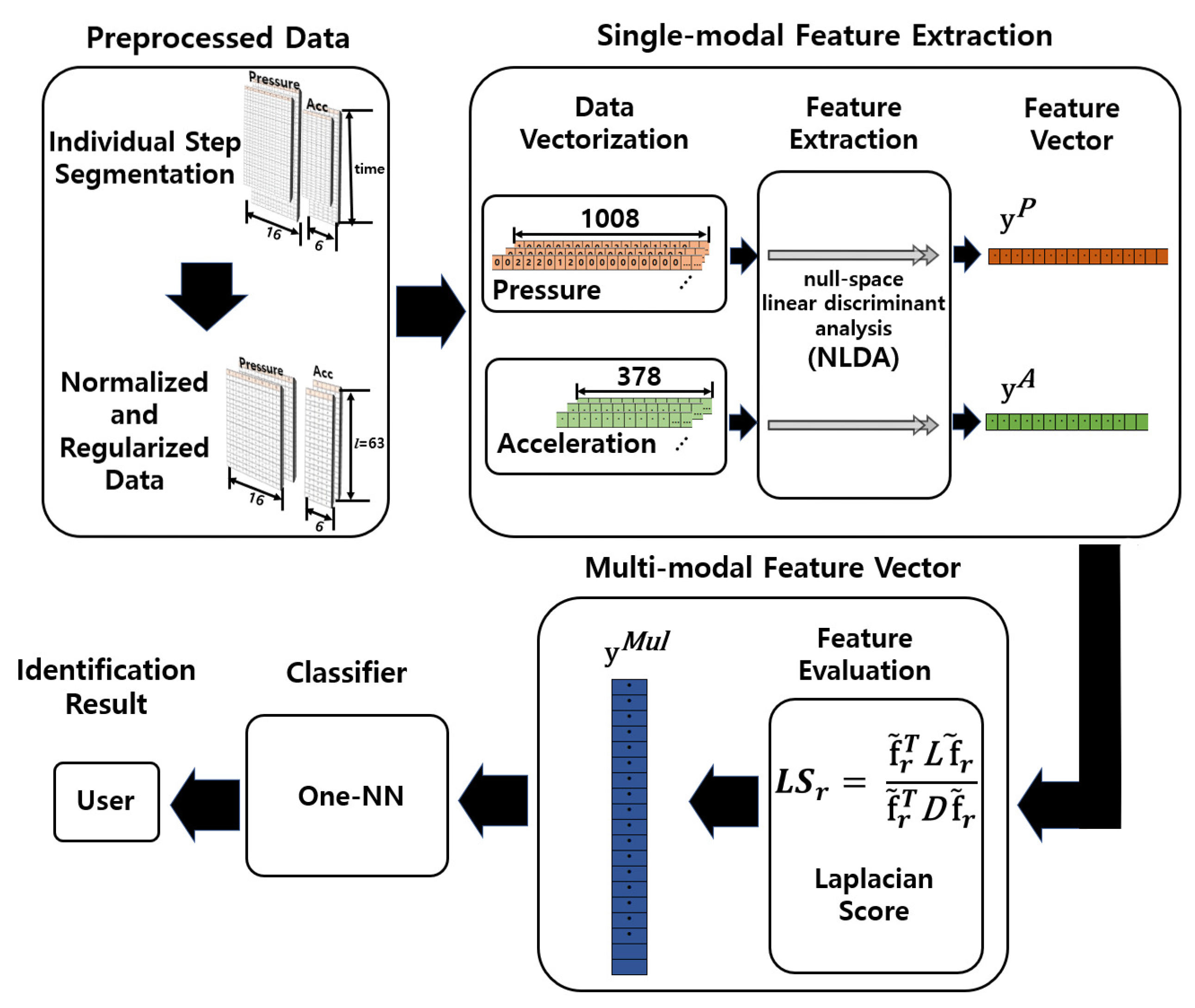
- For each type of sensor, single-modal features were extracted using NLDA from the preprocessed data.
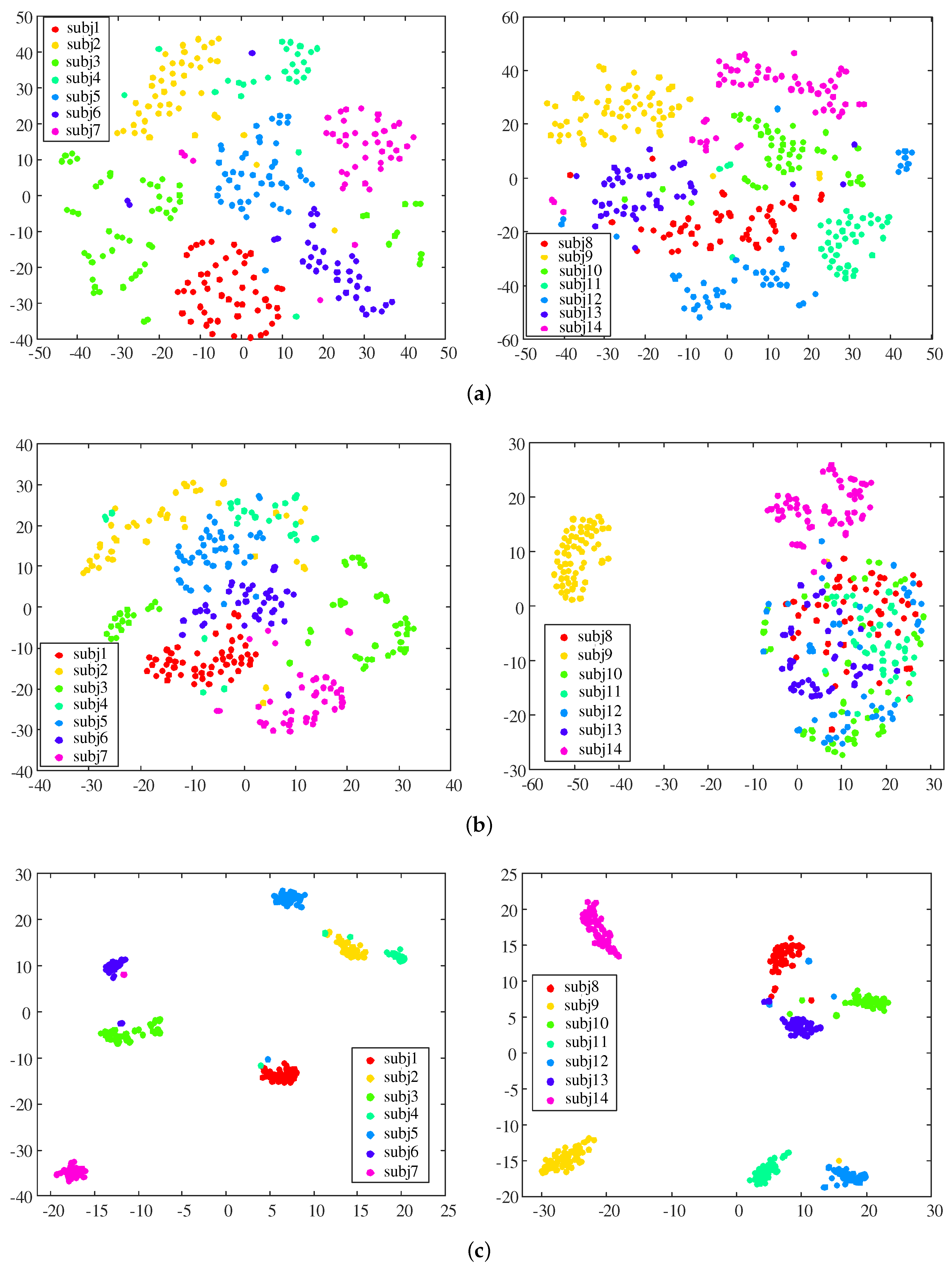
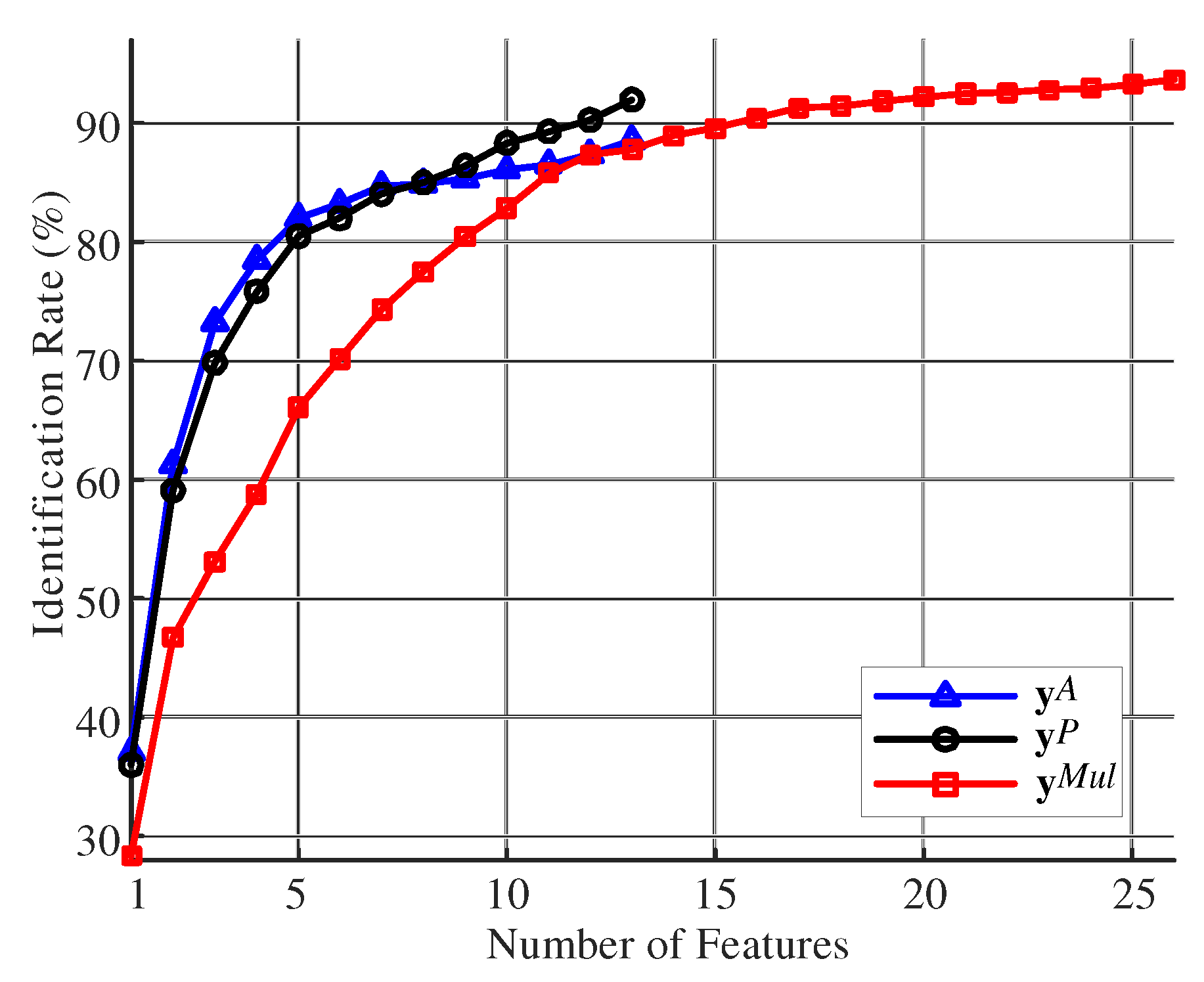
- The Laplacian score of each feature was calculated to evaluate its discriminative power, and a multi-modal feature vector was constructed by sequentially selecting highly-discriminant features.
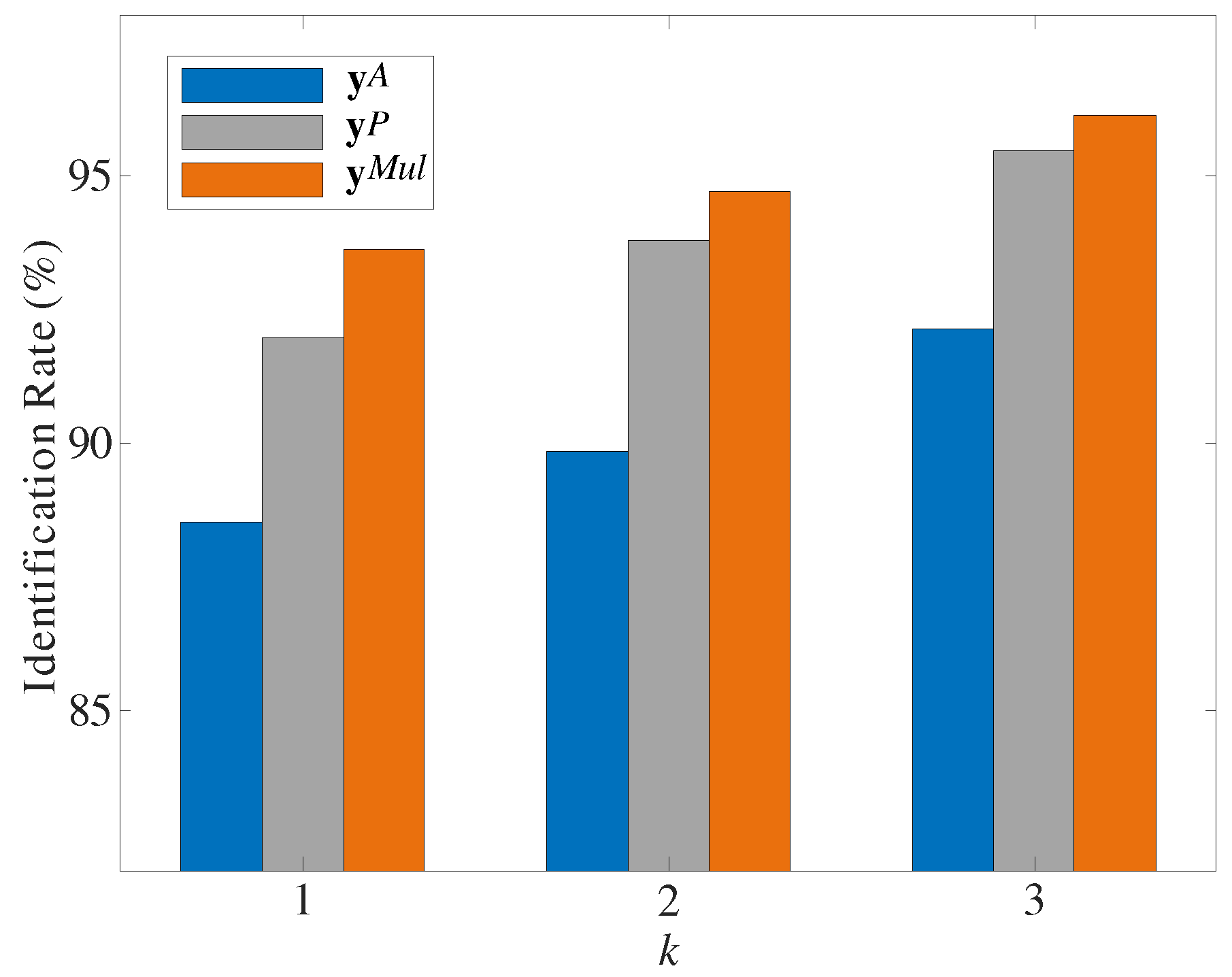
- The resultant multi-modal features were employed for user identification.
4. Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pirker, W.; Katzenschlager, R. Gait disorders in adults and the elderly. Wien. Klin. Wochenschr. 2017, 129, 81–95. [Google Scholar] [CrossRef] [PubMed]
- Haynes, C.A.; Lockhart, T.E. Evaluation of gait and slip parameters for adults with intellectual disability. J. Biomech. 2012, 45, 2337–2341. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Verghese, J.; Lipton, R.; Hall, C.B.; Kuslansky, G.; Katz, M.J.; Buschke, H. Abnormality of gait as a predictor of non-Alzheimer’s dementia. N. Engl. J. Med. 2002, 347, 1761–1768. [Google Scholar] [CrossRef] [PubMed]
- Brandler, T.C.; Wang, C.; Oh-Park, M.; Holtzer, R.; Verghese, J. Depressive symptoms and gait dysfunction in the elderly. Am. J. Geriatr. Psychiatry 2012, 20, 425–432. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Jiang, S.; Wei, D.; Marschollek, M.; Zhang, W. State of the art in gait analysis using wearable sensors for healthcare applications. In Proceedings of the 2012 IEEE/ACIS 11th International Conference on Computer and Information Science (ICIS), Shanghai, China, 30 May–1 June 2012; pp. 213–218. [Google Scholar]
- Mendes, J., Jr.; José, J.A.; Vieira, M.E.M.; Pires, M.B.; Stevan, S.L., Jr. Sensor fusion and smart sensor in sports and biomedical applications. Sensors 2016, 16, 1569. [Google Scholar] [CrossRef] [PubMed]
- Gouwanda, D.; Senanayake, S.M.N.A. Emerging trends of body-mounted sensors in sports and human gait analysis. In Proceedings of the 4th Kuala Lumpur International Conference on Biomedical Engineering, Kuala Lumpur, Malaysia, 25–28 June 2008; Springer: New York, NY, USA, 2008; pp. 715–718. [Google Scholar]
- Choi, S.I.; Lee, S.S.; Park, H.C.; Kim, H. Gait type classification using smart insole sensors. In Proceedings of the TENCON 2018-2018 IEEE Region 10 Conference, Jeju, Korea, 28–31 October 2018; pp. 1903–1906. [Google Scholar]
- Zhang, Z.; Tran, L.; Yin, X.; Atoum, Y.; Liu, X.; Wan, J.; Wang, N. Gait recognition via disentangled representation learning. In Proceedings of the 2019 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 15–21 June 2019; Volume 1, p. I. [Google Scholar]
- Huang, H.; Kuiken, T.A.; Lipschutz, R.D. A strategy for identifying locomotion modes using surface electromyography. IEEE Trans. Biomed. Eng. 2009, 56, 65–73. [Google Scholar] [CrossRef] [PubMed]
- Min, S.D.; Kwon, C.K. Step Counts and Posture Monitoring System using Insole Type Textile Capacitive Pressure Sensor for Smart Gait Analysis. J. Korea Soc. Comput. Inf. 2012, 17, 107–114. [Google Scholar] [CrossRef]
- Kim, S.Y.; Kwon, G.I. Gravity Removal and Vector Rotation Algorithm for Step counting using a 3-axis MEMS accelerometer. J. Korea Soc. Comput. Inf. 2014, 19, 43–52. [Google Scholar] [CrossRef]
- Wu, W.; Dasgupta, S.; Ramirez, E.E.; Peterson, C.; Norman, G.J. Classification accuracies of physical activities using smartphone motion sensors. J. Med Internet Res. 2012, 14, e130. [Google Scholar] [CrossRef]
- Ngo, T.T.; Makihara, Y.; Nagahara, H.; Mukaigawa, Y.; Yagi, Y. Similar gait action recognition using an inertial sensor. Pattern Recognit. 2015, 48, 1289–1301. [Google Scholar] [CrossRef]
- Zhang, T.; Venture, G. Individual recognition from gait using feature value method. Cybern. Inf. Technol. 2012, 12, 86–95. [Google Scholar] [CrossRef]
- El Achkar, C.M.; Lenoble-Hoskovec, C.; Paraschiv-Ionescu, A.; Major, K.; Büla, C.; Aminian, K. Instrumented shoes for activity classification in the elderly. Gait Posture 2016, 44, 12–17. [Google Scholar] [CrossRef] [PubMed]
- Tong, K.; Granat, M.H. A practical gait analysis system using gyroscopes. Med. Eng. Phys. 1999, 21, 87–94. [Google Scholar] [CrossRef]
- Yun, X.; Bachmann, E.R.; Moore, H.; Calusdian, J. Self-contained position tracking of human movement using small inertial/magnetic sensor modules. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2526–2533. [Google Scholar]
- Farah, J.D.; Baddour, N.; Lemaire, E.D. Gait phase detection from thigh kinematics using machine learning techniques. In Proceedings of the 2017 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rochester, MN, USA, 7–10 May 2017; pp. 263–268. [Google Scholar]
- Wahid, F.; Begg, R.K.; Hass, C.J.; Halgamuge, S.; Ackland, D.C. Classification of Parkinson’s disease gait using spatial-temporal gait features. IEEE J. Biomed. Health Inform. 2015, 19, 1794–1802. [Google Scholar] [CrossRef] [PubMed]
- Dolatabadi, E.; Mansfield, A.; Patterson, K.K.; Taati, B.; Mihailidis, A. Mixture-model clustering of pathological gait patterns. IEEE J. Biomed. Health Inform. 2016, 21, 1297–1305. [Google Scholar] [CrossRef] [PubMed]
- Parkka, J.; Ermes, M.; Korpipaa, P.; Mantyjarvi, J.; Peltola, J.; Korhonen, I. Activity classification using realistic data from wearable sensors. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 119–128. [Google Scholar] [CrossRef] [PubMed]
- Manap, H.H.; Tahir, N.M.; Yassin, A.I.M. Statistical analysis of parkinson disease gait classification using Artificial Neural Network. In Proceedings of the 2011 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Bilbao, Spain, 14–17 December 2011; pp. 60–65. [Google Scholar]
- Taborri, J.; Rossi, S.; Palermo, E.; Patanè, F.; Cappa, P. A novel HMM distributed classifier for the detection of gait phases by means of a wearable inertial sensor network. Sensors 2014, 14, 16212–16234. [Google Scholar] [CrossRef] [PubMed]
- Kale, A.; Rajagopalan, A.; Cuntoor, N.; Kruger, V. Gait-based recognition of humans using continuous HMMs. In Proceedings of the Fifth IEEE International Conference on Automatic Face Gesture Recognition, Washington, DC, USA, 21 May 2002; pp. 336–341. [Google Scholar]
- Panahandeh, G.; Mohammadiha, N.; Leijon, A.; Händel, P. Continuous hidden Markov model for pedestrian activity classification and gait analysis. IEEE Trans. Instrum. Meas. 2013, 62, 1073–1083. [Google Scholar] [CrossRef]
- Dehzangi, O.; Taherisadr, M.; ChangalVala, R. IMU-based gait recognition using convolutional neural networks and multi-sensor fusion. Sensors 2017, 17, 2735. [Google Scholar] [CrossRef]
- Gadaleta, M.; Rossi, M. Idnet: Smartphone-based gait recognition with convolutional neural networks. Pattern Recognit. 2018, 74, 25–37. [Google Scholar] [CrossRef]
- Huang, B.; Chen, M.; Huang, P.; Xu, Y. Gait modeling for human identification. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4833–4838. [Google Scholar]
- Lee, S.S.; Choi, S.T.; Choi, S.I. Classification of gait type based on deep learning using various sensors with smart insole. Sensors 2019, 19, 1757. [Google Scholar] [CrossRef] [PubMed]
- Cevikalp, H.; Neamtu, M.; Wilkes, M.; Barkana, A. Discriminative common vectors for face recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 4–13. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Cai, D.; Niyogi, P. Laplacian score for feature selection. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2006; pp. 507–514. [Google Scholar]
- Charalambous, C.P. Walking patterns of normal men. In Classic Papers in Orthopaedics; Springer: New York, NY, USA, 2014; pp. 393–395. [Google Scholar]
- Zhou, X.S.; Huang, T.S. Small sample learning during multimedia retrieval using biasmap. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2001, Kauai, HI, USA, 8–14 December 2001; Volume 1, p. I. [Google Scholar]
- Fukunaga, K. Introduction to Statistical Pattern Recognition, 2nd ed.; Academic Press Professional, Inc.: San Diego, CA, USA, 1990. [Google Scholar]
- Choi, S.I.; Jeon, H.M.; Jeong, G.M. Data reconstruction using subspace analysis for gas classification. IEEE Sens. J. 2017, 17, 5954–5962. [Google Scholar] [CrossRef]
- Maaten, L.V.D.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Lee, S.S.; Chang, S.H.; Choi, S.I. Gait type classification based on deep learning using smart insole. J. Korean Inst. Commun. Inf. Sci. 2018, 43, 1378–1381. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking model scaling for convolutional neural networks. In Proceedings of the 36th International Conference on Machine Learning, ICML 2019, Long Beach, CA, USA, 10–15 June 2019. [Google Scholar]
- Gholami, A.; Kwon, K.; Wu, B.; Tai, Z.; Yue, X.; Jin, P.; Zhao, S.; Keutzer, K. SqueezeNext: Hardware-aware neural network design. In Proceedings of the 2018 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; Volume 1. [Google Scholar]
- Han, S.; Mao, H.; Dally, W.J. Deep compression: Compressing deep neural networks with pruning, trained quantization and huffman coding. In Proceedings of the 2016 International Conference on Learning and Representations, ICLR 2016, San Juan, Puerto Rico, 2–4 May 2016; Volume 1. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | Total Number of Gait Samples | Number of Training Sample | Number of Test Sample |
|---|---|---|---|
| 1 | 2295 | 42 | 658 |
| 2 | 1144 | 42 | 658 |
| 3 | 759 | 42 | 658 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.-I.; Moon, J.; Park, H.-C.; Choi, S.T. User Identification from Gait Analysis Using Multi-Modal Sensors in Smart Insole. Sensors 2019, 19, 3785. https://doi.org/10.3390/s19173785
Choi S-I, Moon J, Park H-C, Choi ST. User Identification from Gait Analysis Using Multi-Modal Sensors in Smart Insole. Sensors. 2019; 19(17):3785. https://doi.org/10.3390/s19173785
Chicago/Turabian StyleChoi, Sang-Il, Jucheol Moon, Hee-Chan Park, and Sang Tae Choi. 2019. "User Identification from Gait Analysis Using Multi-Modal Sensors in Smart Insole" Sensors 19, no. 17: 3785. https://doi.org/10.3390/s19173785