Energy Efficient Range-Free Localization Algorithm for Wireless Sensor Networks



Abstract
:1. Introduction
- A range-free, energy-efficient, novel Distance Vector-Hop (DV-Hop) localization algorithm is proposed to accomplish precise localization and energy efficiency.
- The neighbor nodes of beacon nodes are discovered using two additional Nearest Neighbor ReQuest Tone (NNReQT) and Nearest Neighbor RePly Tone (NNRePT) packets over the media access control (MAC) layer to reduce collisions during transmission.
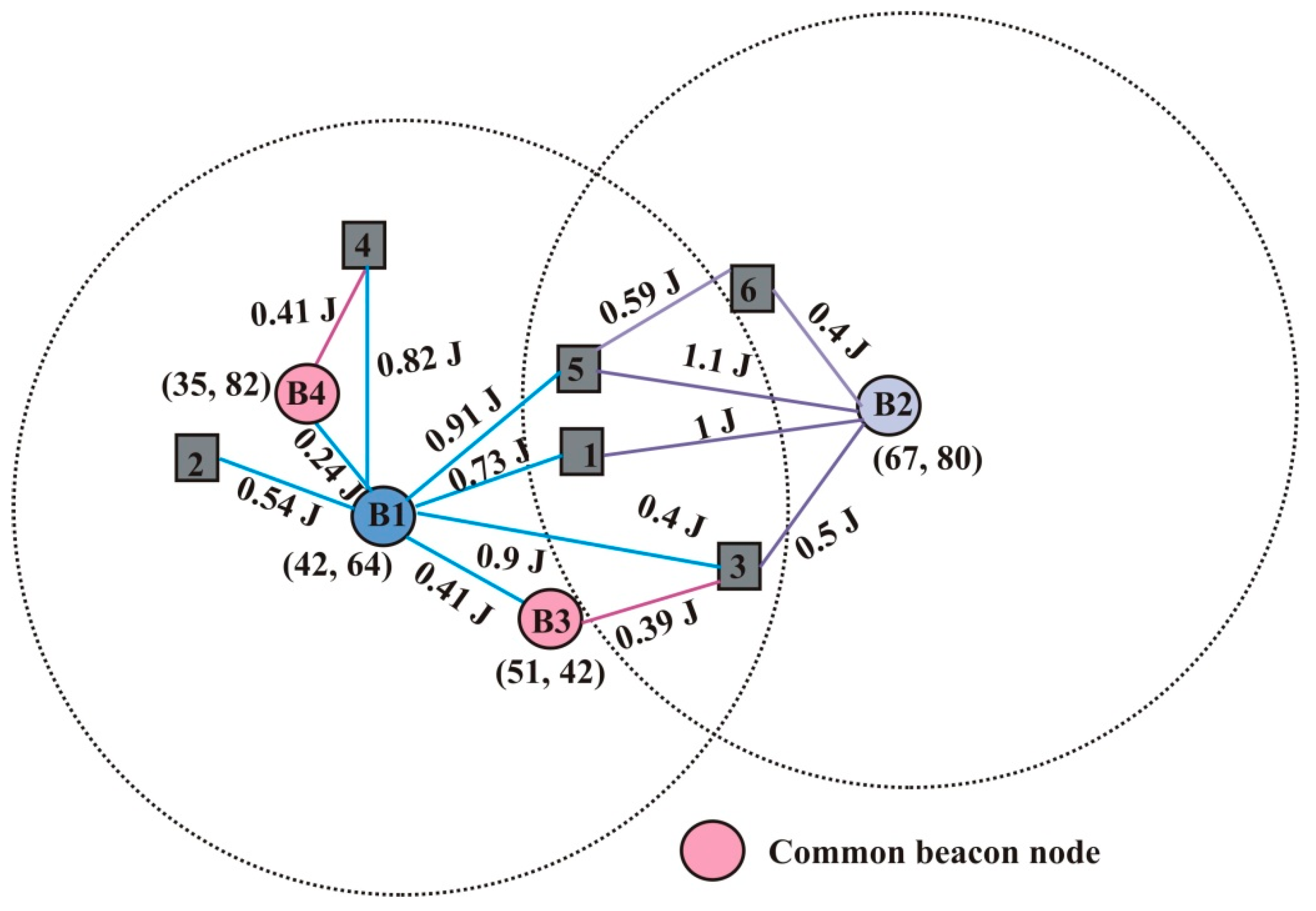
- Further, one-hop neighbor nodes are distributed in two parts to reduce energy consumption, for instance: nodes with direct communication, and with indirect communication.
- The beacon nodes are selected as common nodes for indirect communication between unknown nodes and beacon nodes to reduced energy consumption.
- Finally, the localization errors are reduced using a correction factor and localized unknown nodes are upgraded into helper nodes for accurate localization.
2. Present State of Research and Research Gaps
3. Proposed Network Model
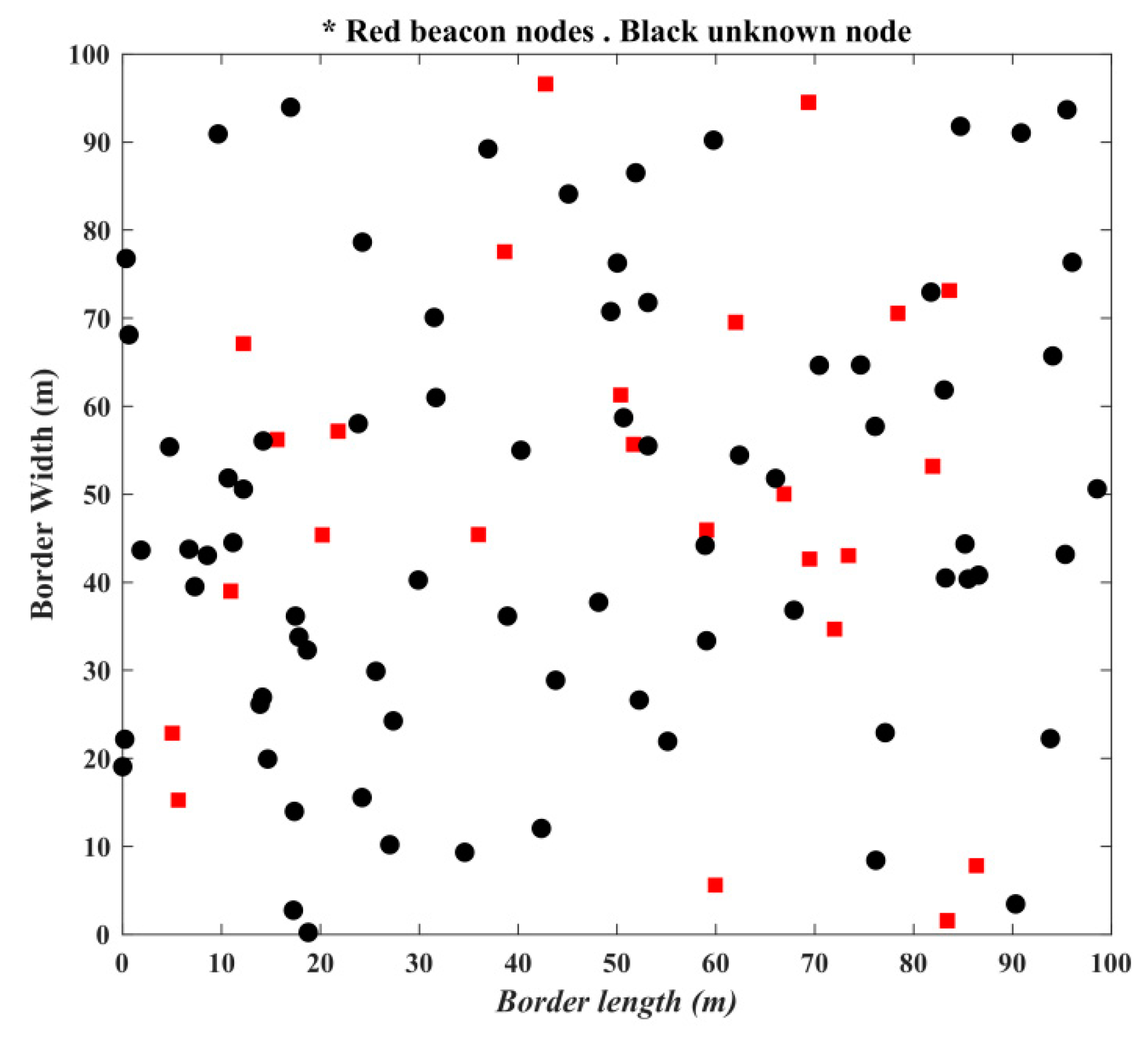
3.1. Anisotropic Network Model
3.2. Proposed Algorithm
4. Performance Evaluation
- Localization error (LE): LE error is defined as the difference between the estimated and actual position of unknown node u and it is computed as follows:
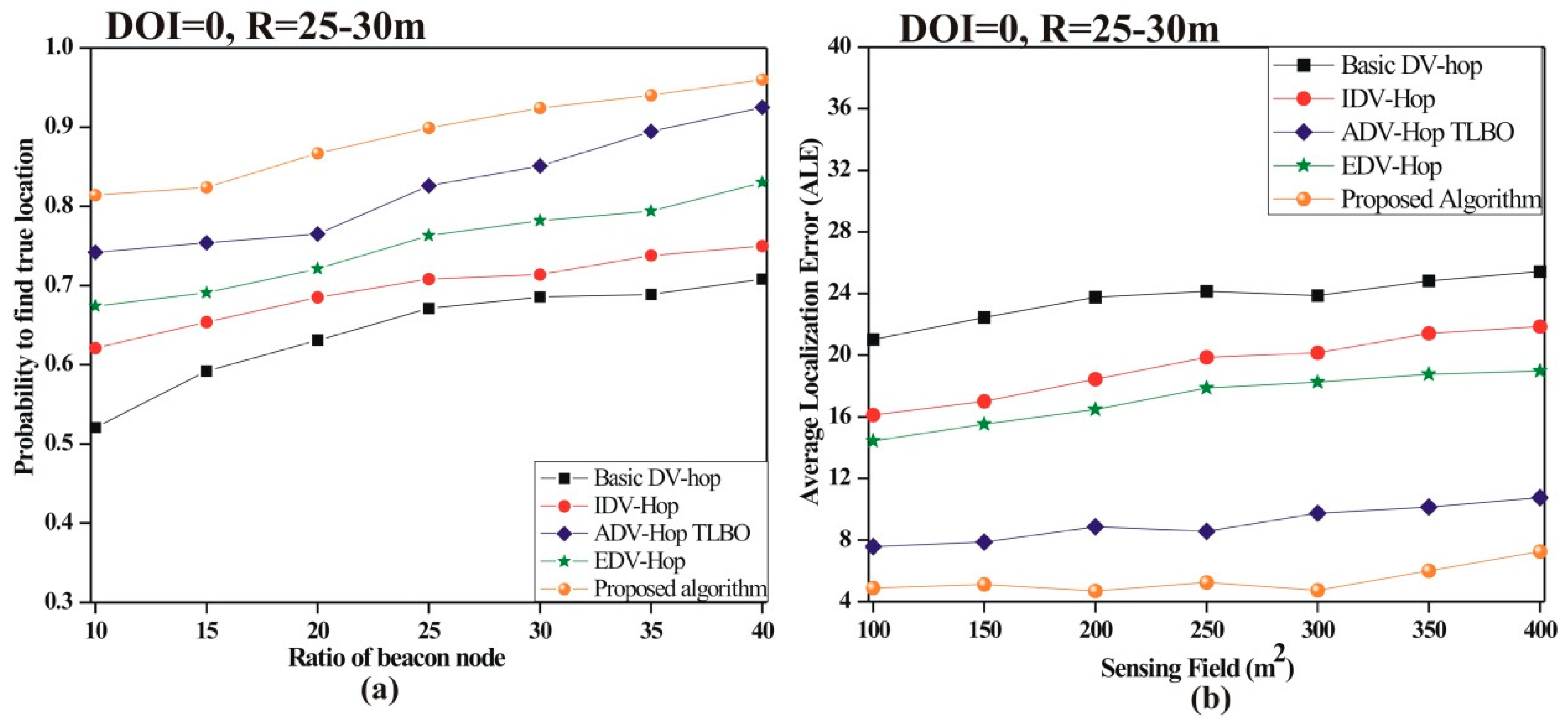
- Average localization error (ALE): ALE is defined as the ratio of the sum of localization error to the total number of unknown nodes and it is computed as follows:
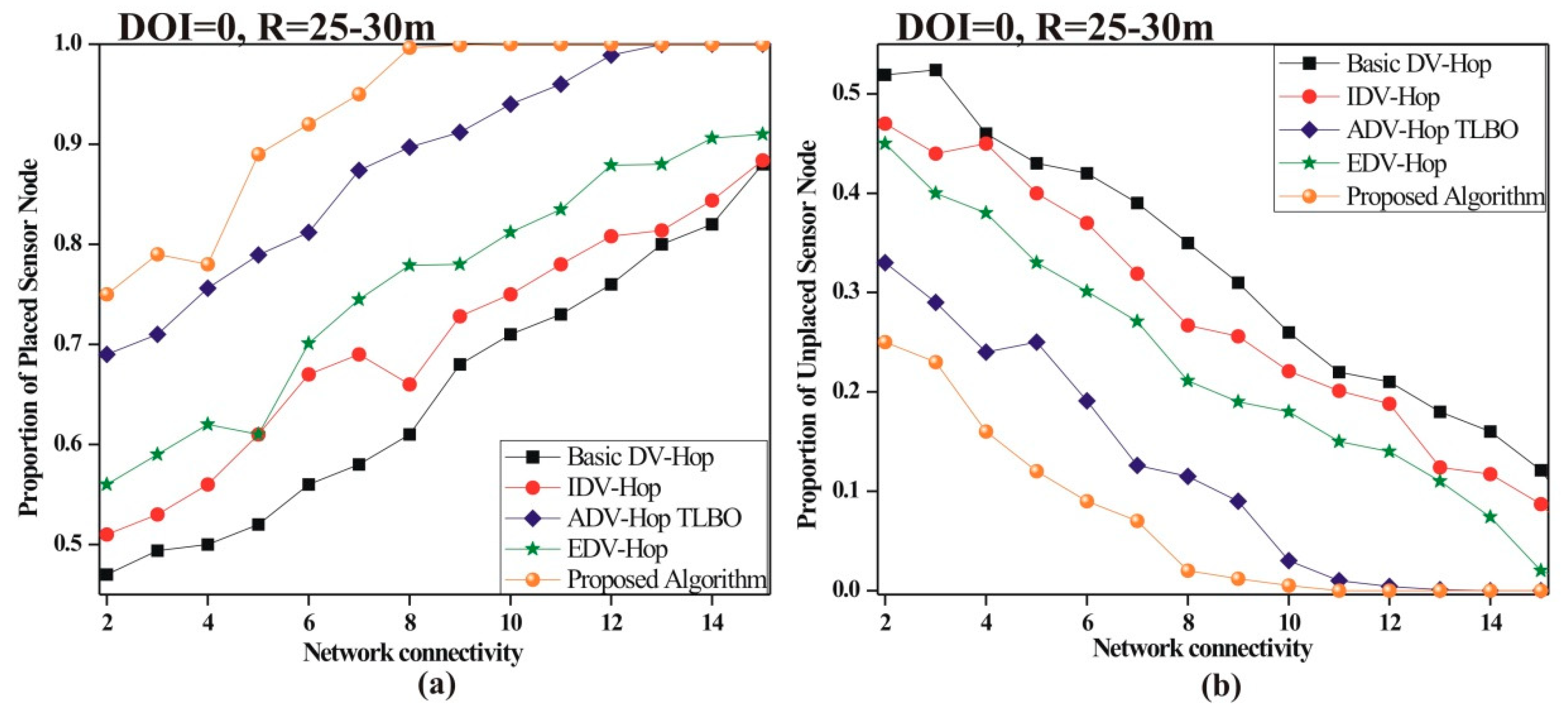
- The proportion of placed sensor nodes (PPSN): PPSN is defined as the ratio of number of placed sensor nodes to the total number of unknown nodes. When localization error of any particular node is less than , that is called placed node otherwise unplaced node described as following:
- The proportion of unplaced sensor nodes (PUSN): PUSN is the ratio of number of unplaced sensor nodes () to a total number of placed nodes and unplaced nodes are those nodes whose locations are not discovered after the localization process. PUSN is expressed as follows:
- Transmission range: In the proposed algorithm, the transmission range of each algorithm is considered variable and varies from minimum to maximum range. The transmission range () is computed as follows:where and represents the minimum and maximum range of transmission respectively. The transmission range of each beacon node lies in a minimum to a maximum range of transmission.
Simulated Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless sensor networks: A survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- Yin, Y.; Chen, L.; Xu, Y.; Wan, J.; Zhang, H.; Mai, Z. QoS Prediction for Service Recommendation with Deep Feature Learning in Edge Computing Environment. Mob. Networks Appl. 2019. [Google Scholar] [CrossRef]
- Yin, Y.; Chen, L.; Xu, Y.; Wan, J. Location-Aware Service Recommendation Enhanced Probab Matrix Factorization. IEEE Access 2018, 6, 62815–62825. [Google Scholar] [CrossRef]
- Liu, B. A study on wireless sensor networks location. In Proceedings of the 2006 International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2006), Wuhan, China, 22–24 September 2006. [Google Scholar]
- Akyildiz, I.F.; Vuran, M.C. WSN Applications. In Wireless Sensor Networks; Wiley: West Sussex, UK, 2011; pp. 17–35. [Google Scholar]
- Tavares, J.; Velez, F.J.; Ferro, J.M. Application of Wireless Sensor Networks to automobiles. Meas. Sci. Rev. 2008, 8, 65–70. [Google Scholar] [CrossRef]
- Yin, Y.; Xu, W.; Xu, Y.; Li, H.; Yu, L. Collaborative QoS Prediction for Mobile Service with Data Filtering and Slope One Model. Mob. Inf. Syst. 2017, 2017, 1–14. [Google Scholar]
- Han, G.; Xu, H.; Duong, T.Q.; Jiang, J.; Hara, T. Localization algorithms of Wireless Sensor Networks: A survey. Telecommun. Syst. 2013, 52, 2419–2436. [Google Scholar] [CrossRef]
- Yu, J.; Rui, Y.; Tang, Y.Y.; Tao, D. High-order distance-based multiview stochastic learning in image classification. IEEE Trans. Cybern. 2014, 44, 2431–2442. [Google Scholar] [CrossRef] [PubMed]
- Dana, A.; Zadeh, A.K.; Hekmat, B. Localization in Ad-Hoc networks. In Proceedings of the 2007 IEEE International Conference on Telecommunications and Malaysia International Conference on Communications (ICT-MICC 2007), Penang, Malaysia, 14–17 March 2007; pp. 313–317. [Google Scholar]
- Yu, J.; Kuang, Z.; Zhang, B.; Zhang, W.; Lin, D.; Fan, J. Leveraging Content Sensitiveness and User Trustworthiness to Recommend Fine-Grained Privacy Settings for Social Image Sharing. IEEE Trans. Inf. Forensics Secur. 2018, 13, 1317–1332. [Google Scholar] [CrossRef]
- Yu, J.; Yang, X.; Gao, F.; Tao, D. Deep Multimodal Distance Metric Learning Using Click Constraints for Image Ranking. IEEE Trans. Cybern. 2017, 47, 4014–4024. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS). In Proceedings of the IEEE Global Telecommunications Conference, San Antonio, TX, USA, 25–29 November 2002; pp. 2926–2931. [Google Scholar]
- Yu, J.; Zhang, B.; Kuang, Z.; Lin, D.; Fan, J. IPrivacy: Image Privacy Protection by Identifying Sensitive Objects via Deep Multi-Task Learning. IEEE Trans. Inf. Forensics Secur. 2017, 12, 1005–1016. [Google Scholar] [CrossRef]
- Jia, G.; Han, G.; Jiang, J.; Chan, S.; Liu, Y. Dynamic cloud resource management for efficient media applications in mobile computing environments. Pers. Ubiquitous Comput. 2018, 22, 561–573. [Google Scholar] [CrossRef]
- Wang, J.; Ghosh, R.K.; Das, S.K. A survey on sensor localization. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Jia, G.; Han, G.; Jiang, J.; Rodrigues, J.J.P.C. PARS: A scheduling of periodically active rank to optimize power efficiency for main memory. J. Network Comput. Appl. 2015, 58, 327–336. [Google Scholar] [CrossRef]
- Jia, G.; Han, G.; Li, A.; Lloret, J. Coordinate Channel-Aware Page Mapping Policy and Memory Scheduling for Reducing Memory Interference Among Multimedia Applications. IEEE Syst. J. 2015, 11, 2839–2851. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Wang, J.; Gu, X.; Liu, W.; Sangaiah, A.K.; Kim, H.J. An empower hamilton loop based data collection algorithm with mobile agent for WSNs. Human-centric Comput. Inf. Sci. 2019, 9, 2–14. [Google Scholar] [CrossRef]
- Xi, W.; He, Y.; Liu, Y.; Zhao, J.; Mo, L.; Yang, Z.; Wang, J.; Li, X. Locating sensors in the wild: Pursuit of ranging quality. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zürich, Switzerland, 3–5 November 2010; pp. 295–308. [Google Scholar]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.J. Energy efficient routing algorithm with mobile sink support for wireless sensor networks. Sensors 2019, 19, 1494. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wan, J.; Liu, R. A novel ranging method based on RSSI. Energy Procedia 2011, 12, 230–235. [Google Scholar] [CrossRef]
- Singh, P.; Agrawal, S. TDOA based node localization in WSN using Neural networks. In Proceedings of the 2013 International Conference on Communication Systems and Network Technologies, Gwalior, India, 6–8 April 2013; pp. 400–404. [Google Scholar]
- Wang, J.; Gao, Y.; Wang, K.; Sangaiah, A.K.; Lim, S.J. An Affinity Propagation-Based Self-Adaptive Clustering Method for Wireless Sensor Networks. Sensors 2019, 19, 2579. [Google Scholar] [CrossRef]
- Gui, L.; Yang, M.; Yu, H.; Li, J.; Shu, F.; Xiao, F. A Cramer-Rao Lower Bound of CSI-Based Indoor Localization. IEEE Trans Veh. Technol. 2018, 67, 2814–2818. [Google Scholar] [CrossRef]
- Kumar, G.; Saha, R.; Rai, M.K.; Thomas, R.; Kim, T.H.; Lim, S.J.; Singh, J.S.P. Improved location estimation in wireless sensor networks using a vector-based swarm optimized connected dominating set. Sensors 2019, 19, 376. [Google Scholar] [CrossRef] [PubMed]
- Kumar, G.; Rai, M.K. An energy efficient and optimized load balanced localization method using CDS with one-hop neighbourhood and genetic algorithm in WSNs. J. Network Comput. Appl. 2017, 78, 73–82. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.J. An improved routing schema with special clustering using PSO algorithm for heterogeneouswireless sensor network. Sensors 2019, 19, 671. [Google Scholar] [CrossRef]
- Ademuwagun, A.; Fabio, V. Reach Centroid Localization Algorithm. Wirel. Sens. Network 2017, 9, 87–101. [Google Scholar] [CrossRef] [Green Version]
- Sun, R.; Shi, L.; Yin, C.; Wang, J. An improved method in deep packet inspection based on regular expression. J. Supercomput. 2019, 75, 3317–3333. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.J. An intelligent data gathering schema with data fusion supported for mobile sink in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2019, 15. [Google Scholar] [CrossRef] [Green Version]
- Migabo, M.E.; Djouani, K.; Kurien, A.M.; Olwal, T.O. Gradient-based routing for energy consumption balance in multiple sinks-based Wireless Sensor Networks. Procedia Comput. Sci. 2015, 63, 488–493. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. DV Based Positioning in Ad Hoc Networks. Telecommun. Syst. 2003, 22, 267–280. [Google Scholar] [CrossRef]
- Ma, D.; Joo, M.; Bang, E.; Hock, W. Range-free wireless sensor networks localization based on hop-count quantization. Telecommun. Syst. 2012, 50, 199–213. [Google Scholar] [CrossRef]
- Gui, L.; Val, T.; Wei, A.; Dalce, R. Improvement of range-free localization technology by a novel DV-hop protocol in wireless sensor networks. Ad Hoc Networks 2015, 24, 55–73. [Google Scholar] [CrossRef] [Green Version]
- Kumar, G.; Rai, M.K.; Saha, R.; Kim, H.J. An improved DV-Hop localization with minimum connected dominating set for mobile nodes in wireless sensor networks. Int. J. Distrib. Sens. Networks 2018, 14. [Google Scholar] [CrossRef] [Green Version]
- Tomic, S.; Mezei, I. Improvements of DV-Hop localization algorithm for wireless sensor networks. Telecommun. Syst. 2016, 61, 93–106. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Liu, X. A weighted DV-Hop localization scheme for wireless sensor networks. In Proceedings of the 2009 International Conference on Scalable Computing and Communications, Dalian, China, 25–27 September 2009; pp. 269–272. [Google Scholar]
- Yin, C.; Ding, S.; Wang, J. Mobile marketing recommendation method based on user location feedback. Human-centric Comput. Inf. Sci 2019, 9. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, J.; Shi, Q.; Xu, Q. An improved scheme for DV-Hop in WSNs. In Proceedings of the 11th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2015. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Y.; Jin, X.; Li, F.; Wang, J. A fast object tracker based on integrated multiple features and dynamic learning rate. Math. Prob. Eng. 2018. [Google Scholar] [CrossRef]
- Tao, Q.; Zhang, L.H. Enhancement of DV-Hop by weighted hop distance. In Proceedings of the 2016 IEEE Advanced Information Management, Xi’an, China, 3–5 October 2016; pp. 1577–1580. [Google Scholar]
- Kaur, A.; Kumar, P.; Gupta, G.P. Analysis on DV-hop algorithm and its variants by considering threshold. J. Telecommun., Electron. Comput. Eng. 2017, 9, 79–83. [Google Scholar]
- Mehrabi, M.; Taheri, H.; Taghdiri, P. An improved DV-Hop localization algorithm based on evolutionary algorithms. Telecommun. Syst. 2016, 64, 639–647. [Google Scholar] [CrossRef]
- Peng, B.; Li, L. An improved localization algorithm based on genetic algorithm in wireless sensor networks. Cognitive Neurodynamics 2015, 9, 249–256. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Song, L.; Zhao, L.; Ye, J. DV-Hop Node Location Algorithm Based on GSO in Wireless Sensor Networks. J. Sens. 2019, 2019, 1–9. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, Z. A novel DV-Hop method for localization of network nodes. In Proceedings of the 2016 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 8346–8351. [Google Scholar]
- Zhang, D.; Fang, Z.; Wang, Y.; Sun, H. Research on an improved DV-HOP localization algorithm based on PSODE in WSN. J. Commun. 2015, 10, 728–733. [Google Scholar] [CrossRef]
- Sun, B.; Cui, Z.; Dai, C.; Chen, W. DV-Hop Localization Algorithm with Cuckoo Search. Sens. Lett. 2014, 12, 444–447. [Google Scholar] [CrossRef]
- Kaur, A.; Kumar, P.; Gupta, G.P. Nature Inspired Algorithm-Based Improved Variants of DV-Hop Algorithm for Randomly Deployed 2D and 3D Wireless Sensor Networks. Wirel. Pers. Commun. 2018, 101, 567–582. [Google Scholar] [CrossRef]
- Sharma, G.; Kumar, A. Modified Energy-Efficient Range-Free Localization Using Teaching–Learning-Based Optimization for Wireless Sensor Networks. IETE J. Res. 2018, 64, 124–138. [Google Scholar] [CrossRef]
- Sharma, G.; Kumar, A. Improved DV-Hop localization algorithm using teaching learning based optimization for wireless sensor networks. Telecommun. Syst. 2018, 67, 163–178. [Google Scholar] [CrossRef]
- Sharma, G.; Kumar, A. Improved range-free localization for three-dimensional wireless sensor networks using genetic algorithm. Comput. Electr. Eng. 2018, 72, 808–827. [Google Scholar] [CrossRef]
- Cui, L.; Xu, C.; Li, G.; Ming, Z.; Feng, Y.; Lu, N. A high accurate localization algorithm with DV-Hop and differential evolution for wireless sensor network. Appl. Soft Comput. J. 2018, 68, 39–52. [Google Scholar] [CrossRef]
- Alomari, A.; Member, S.; Phillips, W.; Aslam, N.; Comeau, F. Swarm Intelligence Optimization Techniques Localization in Wireless Sensor Networks. IEEE Access 2017, 3536, 1–19. [Google Scholar]
- Song, Y.; Wang, B.; Shi, Z.; Pattipati, K.R.; Gupta, S. Distributed algorithms for energy-efficient even self-deployment in mobile sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 1035–1047. [Google Scholar] [CrossRef]
- El Assaf, A.; Zaidi, S.; Affes, S.; Kandil, N. Hop-count based localization algorithm for wireless sensor networks. In Proceedings of the 2013 13th Mediterranean Microwave Symposium (MMS), Saida, Lebanon, 2–5 September 2013; pp. 1–6. [Google Scholar]
- Zhang, S.; Cao, J.; Li-Jun, C.; Chen, D. Accurate and Energy-Efficient Range-Free Localization for Mobile Sensor Networks. IEEE Trans Mob. Comput. 2010, 9, 897–910. [Google Scholar] [CrossRef]
- Wang, P.; Xue, F.; Li, H.; Cui, Z.; Chen, J. A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things. Mathematics 2019, 7, 184. [Google Scholar] [CrossRef]
- Agrawal, M.; Kumar Sarkar, B. Investigation of Recent Energy Efficient MAC Protocols for WSN: A Review. Int. J. Adv. Res. Comput. Sci. 2012, 3, 181–186. [Google Scholar]
- Touil, H.; Fakhri, Y.; Kerroum, M.A. A Performance Evaluation Approach for MAC Protocols of Wireless Multimedia Sensor Networks. Int. J. Ad Hoc Ubiquitous Comput. 2017, 25, 264–272. [Google Scholar] [CrossRef]
- Kabara, J.; Calle, M. MAC protocols used by wireless sensor networks and a general method of performance evaluation. Int. J. Distrib. Sens. Netw. 2012, 8, 834784. [Google Scholar] [CrossRef]
- Shamna, H.R.; Lillykutty, J. An energy and throughput efficient distributed cooperative MAC protocol for multihop wireless networks. Comput. Networks 2017, 126, 15–30. [Google Scholar] [CrossRef]
- Keshtgary, M.; Javidan, R.; Mohammadi, R. Comparative performance evaluation of MAC layer protocols for underwater wireless sensor networks. Mod. Appl. Sci. 2012, 6, 65–72. [Google Scholar] [CrossRef]
- Kim, H.W.; Im, T.H.; Cho, H.S. UCMAC: A cooperative MAC protocol for underwater wireless sensor networks. Sensors 2018, 18, 1969. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Wu, S.; Huang, B.; Liu, F.; Xu, Z. A power-optimized cooperative MAC protocol for lifetime extension in wireless sensor networks. Sensors 2016, 16, 1630. [Google Scholar] [CrossRef]
- Gui, L.; Huang, X.; Xiao, F.; Zhang, Y.; Shu, F.; Wei, J.; Val, T. DV-hop localization with protocol sequence based access. IEEE Trans. Veh. Tech. 2018, 67, 9972–9982. [Google Scholar] [CrossRef]
- Zhou, G.; He, T.; Krishnamurthy, S.; Stankovic, J.A. Models and solutions for radio irregularity in wireless sensor networks. ACM Trans. Sens. Networks 2006, 2, 221–262. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location of the Neighbor Node | Indirect Transmission Cost | Common Node Id | Direct Transmission Cost | Status | |
|---|---|---|---|---|---|
| 1 | _ | 0.3 J | _ | 0.3 J | 0 |
| Location of the Neighbor Node | Indirect Transmission Cost | Common Node | Direct Transmission Cost | Status | |
|---|---|---|---|---|---|
| 1 | _ | 0.73 J | _ | 0.73 J | 0 |
| 2 | _ | 0.54 J | _ | 0.54 J | 0 |
| 3 | _ | 0.9 J | _ | 0.9 J | 0 |
| 4 | _ | 0.82 J | _ | 0.82 J | 0 |
| 5 | _ | 0.91 J | _ | 0.91 J | 0 |
| B3 | (51, 42) | 0.41 J | _ | 0.41 J | 0 |
| B4 | (35, 82) | 0.24 J | _ | 0.24 J | 0 |
| Location of the Neighbor Node | Indirect Transmission Cost | Common Node | Direct Transmission Cost | Status | |
|---|---|---|---|---|---|
| 1 | _ | 0.73 J | _ | 0.73 J | 0 |
| 2 | _ | 0.54 J | _ | 0.54 J | 0 |
| 3 | _ | 0.8 J | B3 | 0.9 J | 1 |
| 4 | _ | 0.75 J | B4 | 0.82 J | 1 |
| 5 | _ | 0.91 J | _ | 0.91 J | 0 |
| B3 | (51, 42) | 0.51 J | _ | 0.51 J | 0 |
| B4 | (35, 82) | 0.24 J | _ | 0.24 J | 0 |
| Simulation Parameters | Value | Simulation Parameters | Value |
|---|---|---|---|
| Border length | 100 × to 500 × | MAC protocol | 802.11 b |
| Total nodes | 100–200 | Initial energy | 5 J |
| Beacon nodes | 10 to 40% | Size of packets | 512 bytes |
| Transmission range R | 15–45 m | Maximum iterations | 200 |
| Network topology | Random | Network connectivity | 2–15 |
| DOI | 0–0.3 | Simulation time | 400 s |
| Algorithm | Maximum Error | Minimum Error | ALE |
|---|---|---|---|
| Basic DV-Hop [34] | 35.144 | 9.224 | 19.47 |
| EDV-Hop [45] | 24.971 | 4.623 | 11.25 |
| IDV-Hop [46] | 30.312 | 7.0014 | 14.04 |
| ADV-Hop TLBO [53] | 16.308 | 0.735 | 7.3104 |
| Proposed algorithm | 10.304 | 0.1341 | 4.45 |
| Algorithm | Performance Evaluation | ||||||
|---|---|---|---|---|---|---|---|
| Localization Accuracy (%) | Average Residual Energy (%) | Transmission Range | MAC Incorporation | Network Type | An-isotropic Network | Packet Broadcasting | |
| Basic DV-Hop [34] | 80.53 | 82.56 | Fixed | No | Homogenous | No | Whole network |
| IDV-Hop [46] | 85.96 | 79.62 | Fixed | No | Homogenous | No | Whole network |
| ADV-Hop TLBO [53] | 92.68 | 76.34 | Fixed | No | Homogenous | Yes | Whole network |
| EDV-Hop [45] | 88.75 | 78.37 | Fixed | No | Homogenous | No | Whole network |
| Proposed Algorithm | 95.55 | 85.75 | Variable | Yes | Heterogeneous | Yes | Within one-hop |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goyat, R.; Rai, M.K.; Kumar, G.; Saha, R.; Kim, T.-H. Energy Efficient Range-Free Localization Algorithm for Wireless Sensor Networks. Sensors 2019, 19, 3603. https://doi.org/10.3390/s19163603
Goyat R, Rai MK, Kumar G, Saha R, Kim T-H. Energy Efficient Range-Free Localization Algorithm for Wireless Sensor Networks. Sensors. 2019; 19(16):3603. https://doi.org/10.3390/s19163603
Chicago/Turabian StyleGoyat, Rekha, Mritunjay Kumar Rai, Gulshan Kumar, Rahul Saha, and Tai-Hoon Kim. 2019. "Energy Efficient Range-Free Localization Algorithm for Wireless Sensor Networks" Sensors 19, no. 16: 3603. https://doi.org/10.3390/s19163603