Accurate Evaluation of Vertical Tidal Displacement Determined by GPS Kinematic Precise Point Positioning: A Case Study of Hong Kong

Abstract
:1. Introduction
2. Data Processing and Analysis Method
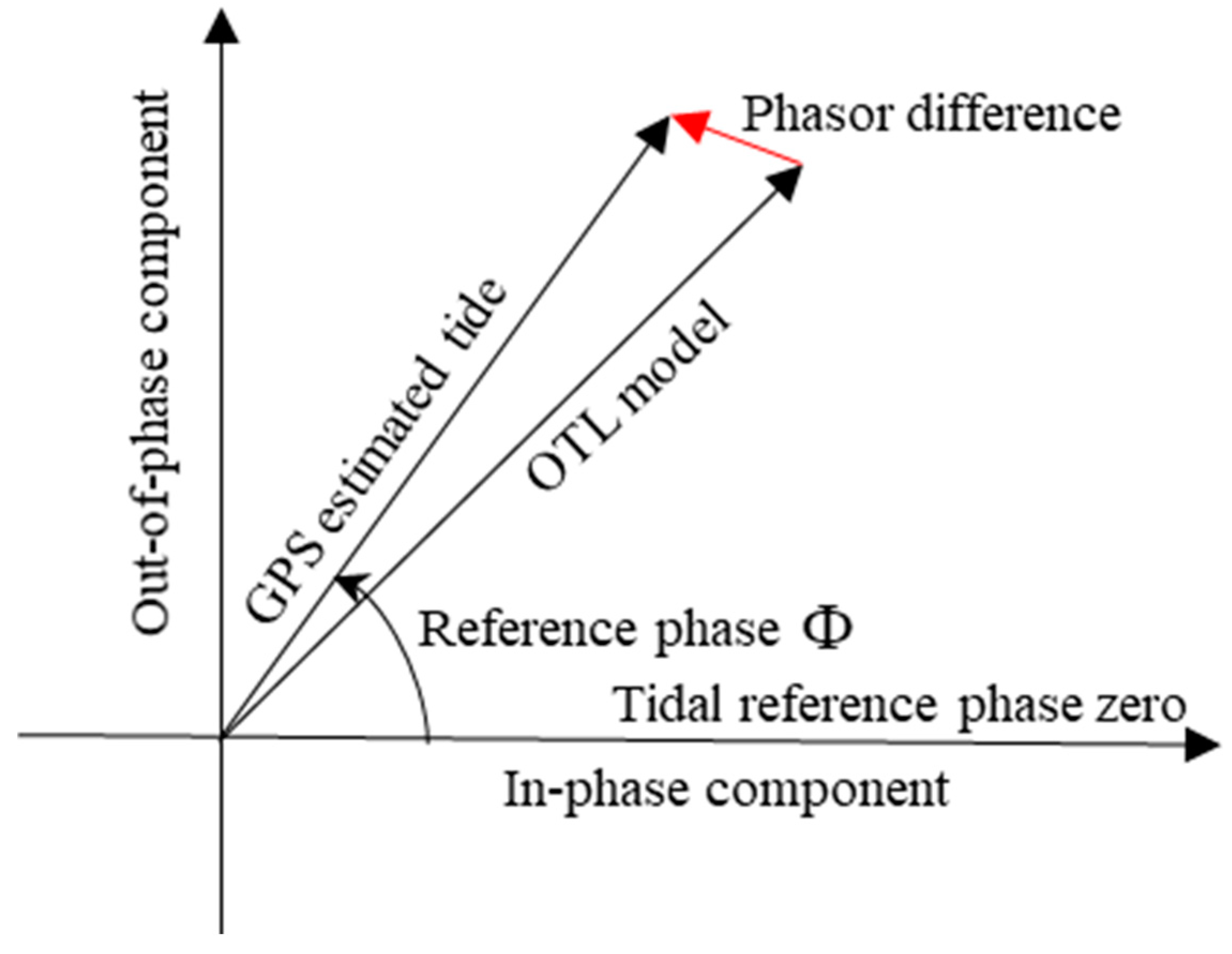
2.1. Method of KPPP-estimated OTL Displacement
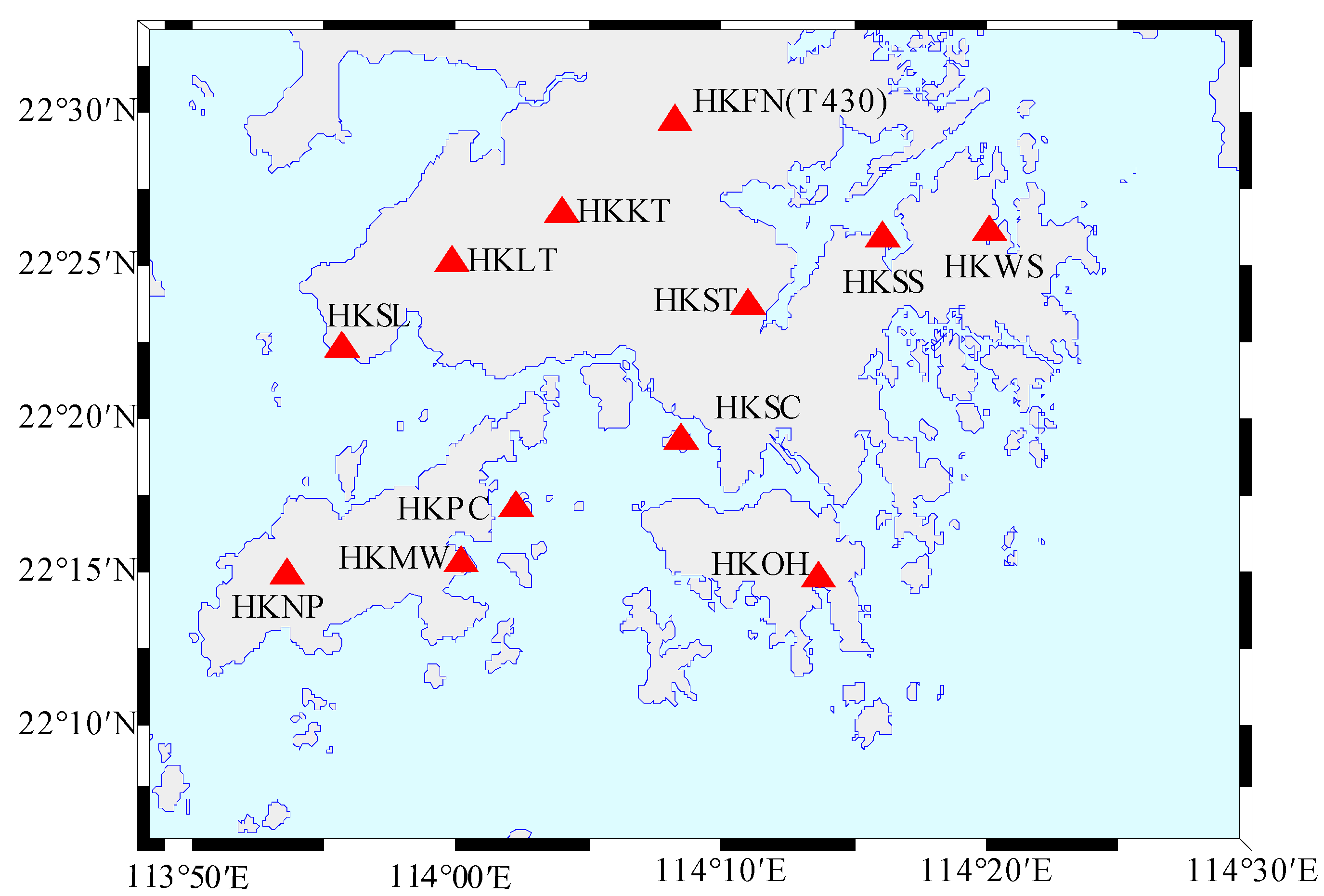
2.2. GPS Data Acquisition and Processing
2.3. OTL Model and Tidal Signal Analysis
3. Results and Discussion
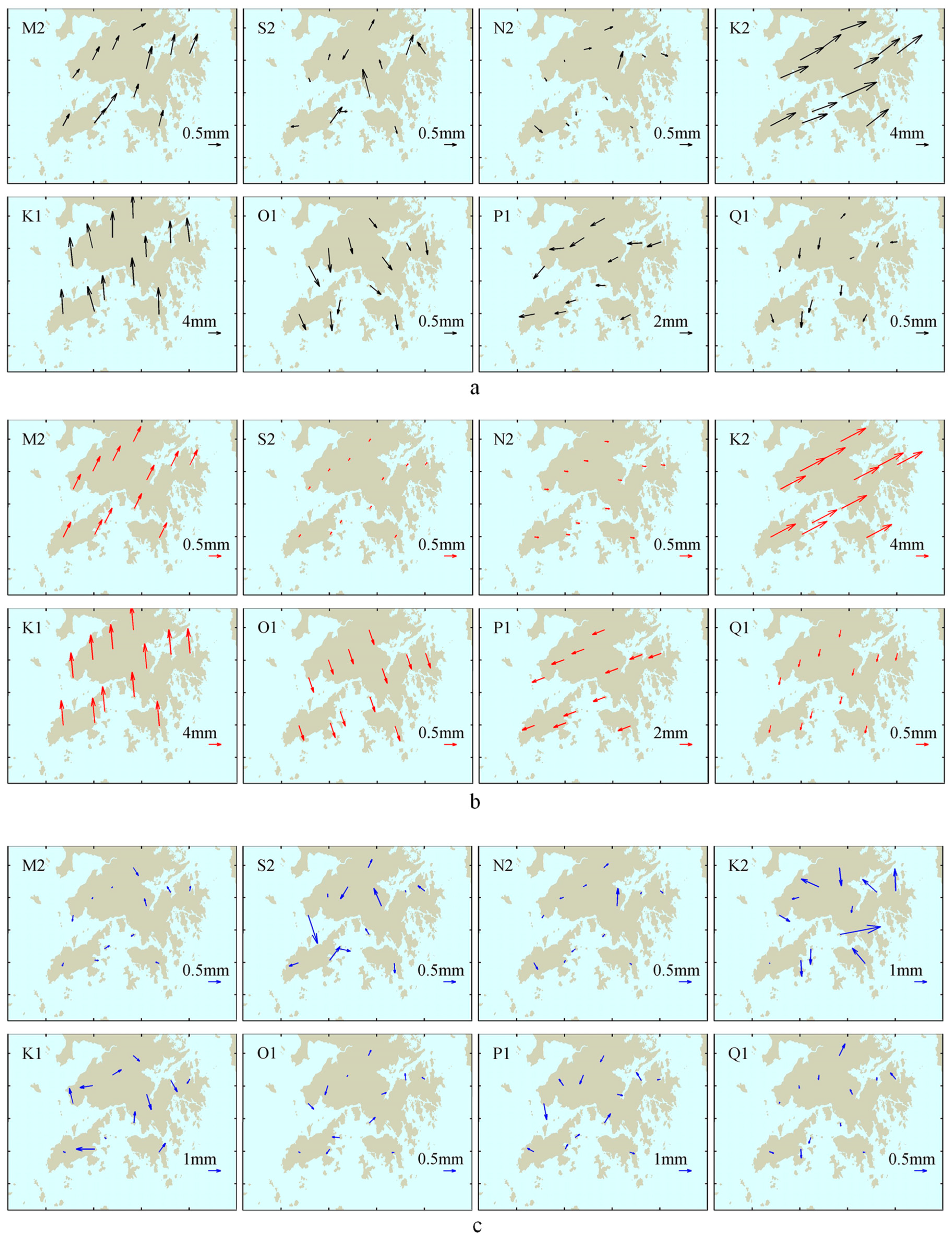
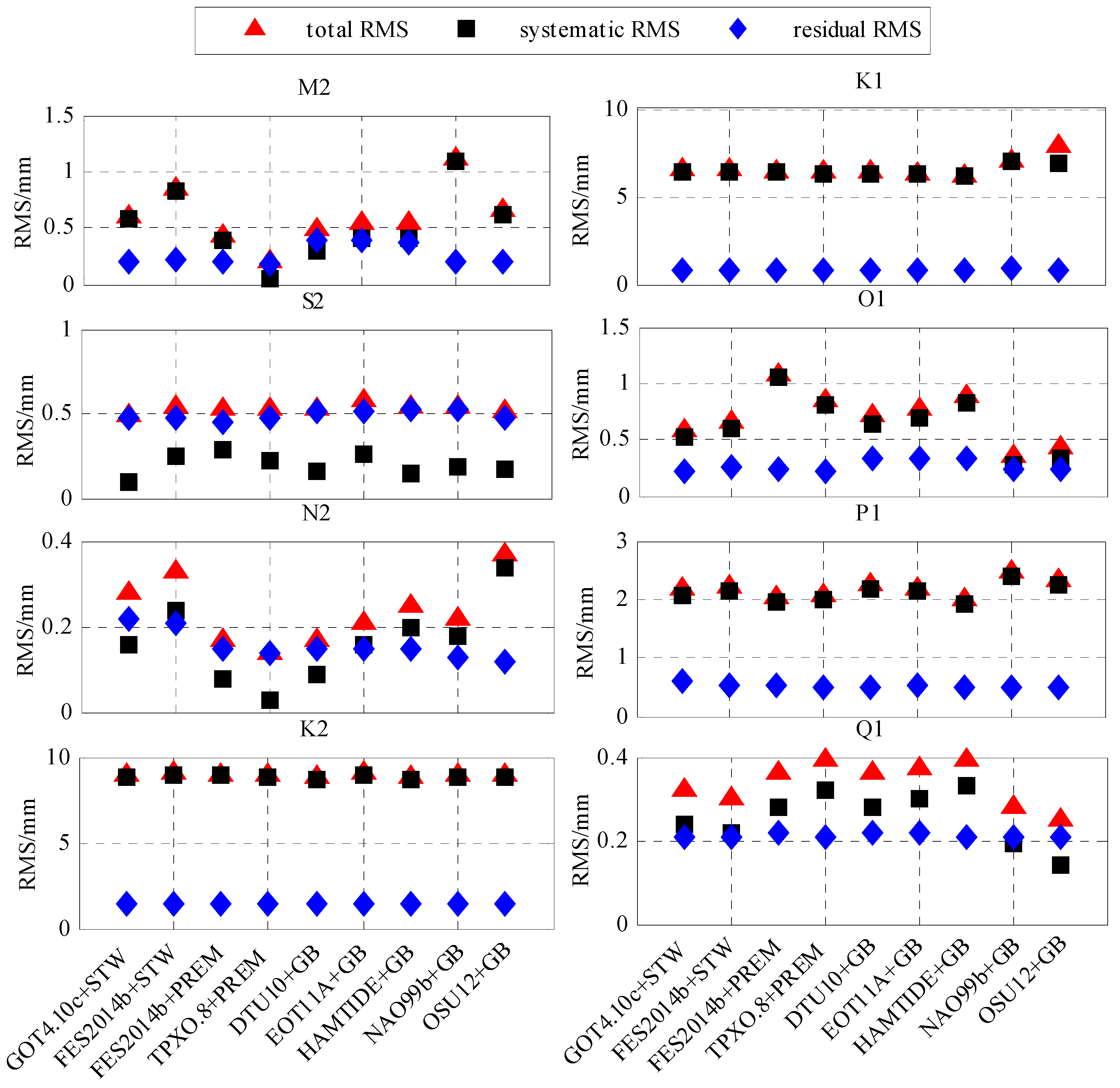
3.1. Comparison with the OTL Models
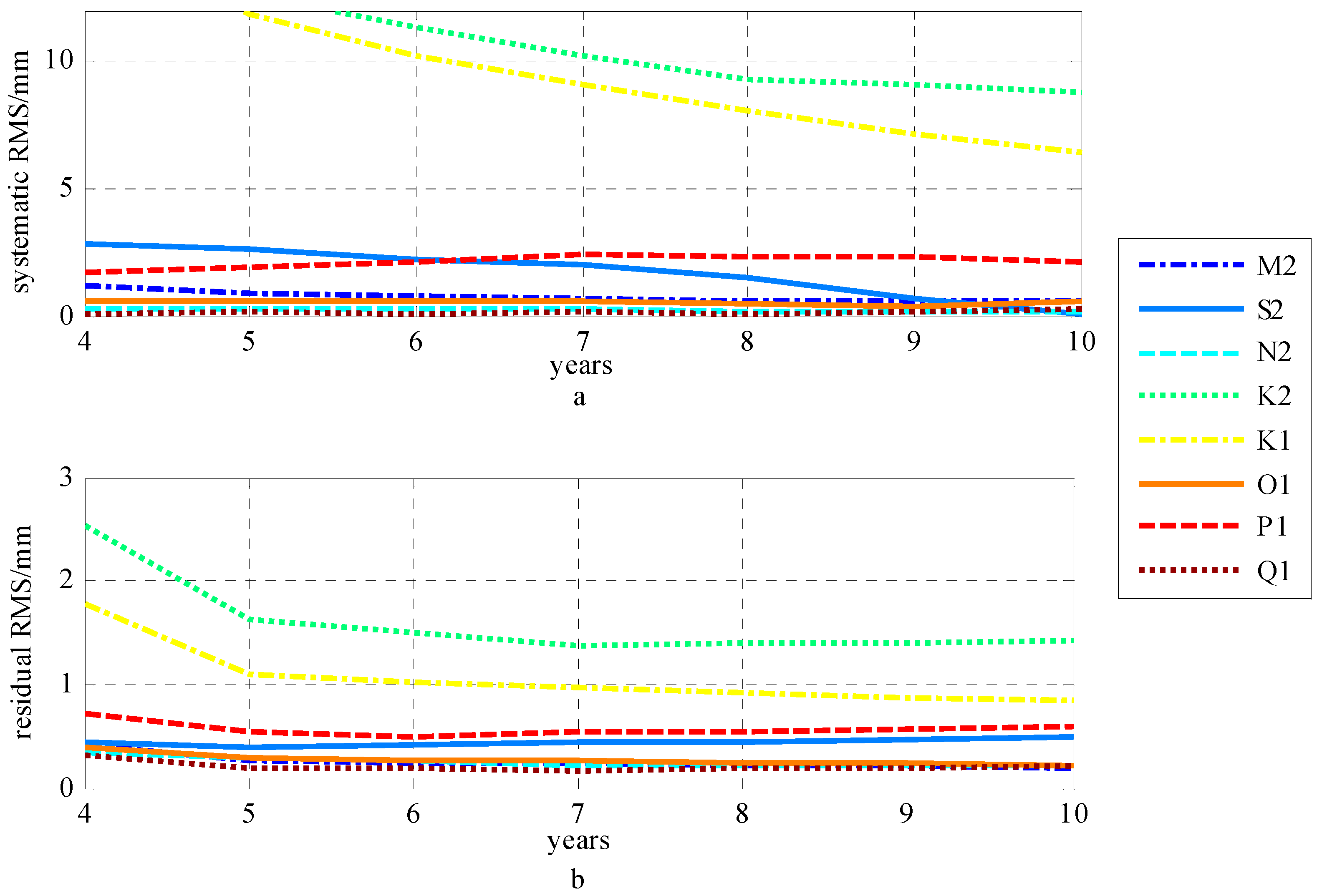
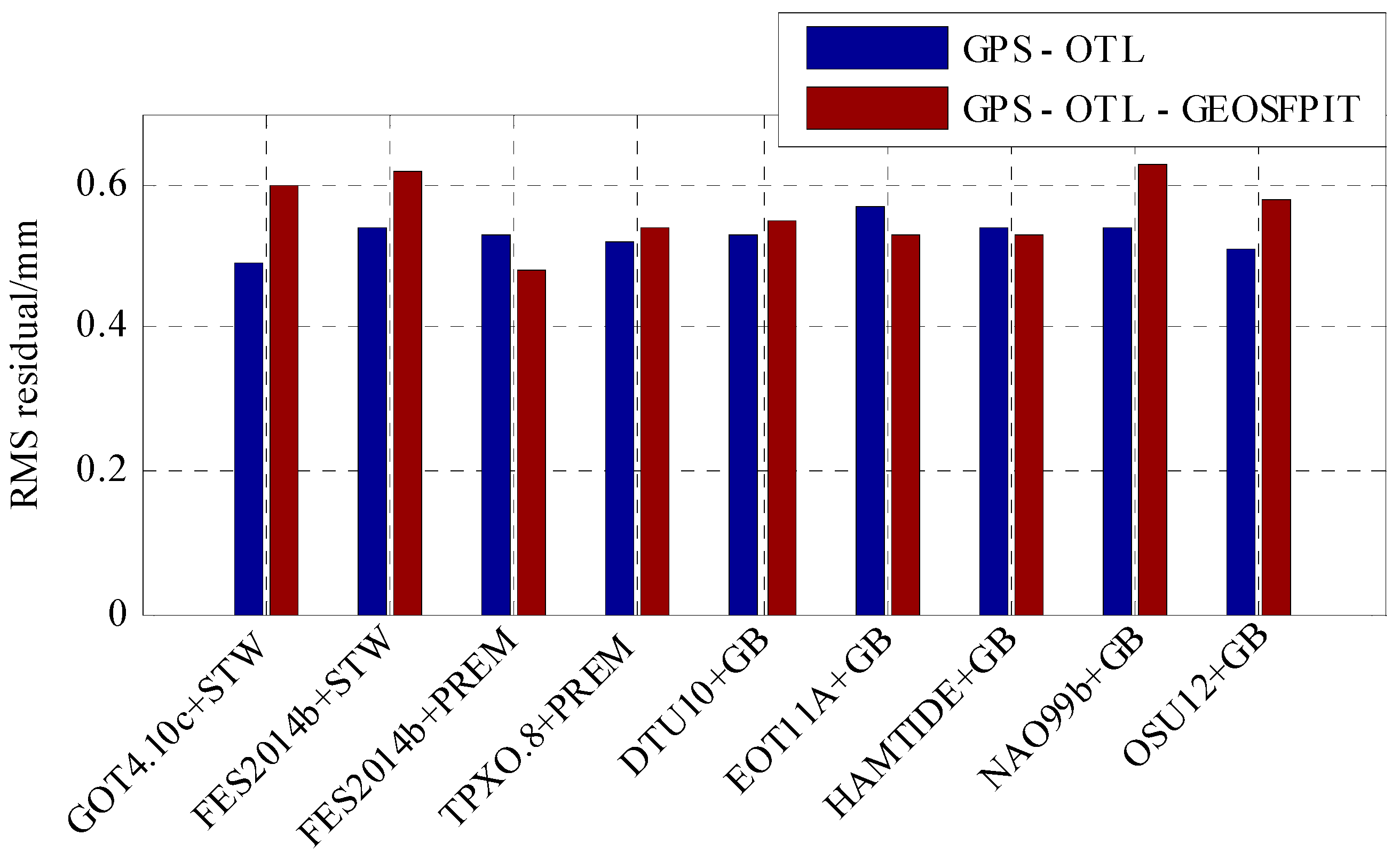
3.2. Accuracy Assessment for the KPPP-Estimated OTL
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M2 | S2 | N2 | K2 | |||||
|---|---|---|---|---|---|---|---|---|
| Station | A (mm) | (°) | A (mm) | (°) | A (mm) | (°) | A (mm) | (°) |
| HKFN | 4.86 | 189.2 | 1.47 | 181.4 | 1.04 | 169.4 | 8.14 | 14.7 |
| HKKT | 5.25 | 187.8 | 2.03 | 200.0 | 1.10 | 175.0 | 7.32 | 30.6 |
| HKLT | 5.41 | 189.7 | 1.70 | 193.2 | 1.39 | 181.1 | 7.79 | 23.1 |
| HKMW | 5.88 | 192.9 | 1.41 | 193.0 | 1.44 | 182.7 | 8.04 | 14.7 |
| HKNP | 6.13 | 194.5 | 2.34 | 195.6 | 1.27 | 192.7 | 8.31 | 21.3 |
| HKOH | 6.17 | 189.8 | 2.09 | 207.3 | 1.50 | 181.1 | 7.80 | 31.9 |
| HKPC | 5.73 | 191.1 | 1.56 | 210.2 | 1.54 | 184.9 | 7.95 | 15.2 |
| HKSC | 5.82 | 189.9 | 1.94 | 189.7 | 1.42 | 182.5 | 11.55 | 18.4 |
| HKSL | 5.80 | 193.6 | 2.08 | 230.1 | 1.40 | 184.6 | 9.00 | 17.5 |
| HKSS | 5.55 | 184.9 | 1.79 | 190.7 | 1.33 | 179.9 | 7.69 | 31.7 |
| HKST | 5.44 | 184.8 | 2.02 | 178.3 | 1.34 | 176.9 | 8.09 | 20.1 |
| HKWS | 5.51 | 185.5 | 2.08 | 186.7 | 1.22 | 179.9 | 8.90 | 31.5 |
| Station | K1 | O1 | P1 | Q1 | ||||
|---|---|---|---|---|---|---|---|---|
| A (mm) | (°) | A (mm) | (°) | A (mm) | (°) | A (mm) | (°) | |
| HKFN | 7.21 | 32.7 | 6.73 | 306.9 | 1.85 | 260.2 | 1.20 | 297.4 |
| HKKT | 7.95 | 35.8 | 6.96 | 305.5 | 1.98 | 262.4 | 1.64 | 281.6 |
| HKLT | 6.47 | 40.6 | 7.25 | 304.4 | 1.00 | 255.8 | 1.62 | 283.9 |
| HKMW | 6.85 | 39.6 | 7.77 | 306.6 | 1.22 | 297.5 | 1.93 | 284.1 |
| HKNP | 8.21 | 32.5 | 7.76 | 308.8 | 1.17 | 260.8 | 1.73 | 291.4 |
| HKOH | 8.84 | 32.9 | 7.86 | 306.9 | 1.71 | 296.5 | 1.66 | 282.2 |
| HKPC | 8.03 | 32.1 | 7.46 | 306.0 | 1.38 | 300.2 | 1.79 | 281.4 |
| HKSC | 8.20 | 37.7 | 7.50 | 309.3 | 1.07 | 311.2 | 1.70 | 284.2 |
| HKSL | 8.08 | 41.7 | 7.63 | 308.1 | 1.74 | 289.5 | 1.53 | 286.3 |
| HKSS | 7.46 | 27.6 | 7.07 | 306.7 | 0.96 | 254.1 | 1.47 | 284.1 |
| HKST | 7.22 | 26.8 | 7.27 | 307.6 | 1.60 | 291.3 | 1.37 | 280.9 |
| HKWS | 7.20 | 32.5 | 7.30 | 305.3 | 1.50 | 268.3 | 1.35 | 276.5 |
References
- Yuan, L.G.; Ding, X.L.; Zhong, P.; Chen, W.; Huang, D.F. Estimates of ocean tide loading displacements and its impact on position time series in Hong Kong using a dense continuous GPS network. J. Geod. 2009, 83, 999–1015. [Google Scholar] [CrossRef]
- Li, Z.; Jiang, W.; Ding, W.; Deng, L.; Peng, L. Estimates of minor ocean tide loading displacement and its impact on continuous GPS coordinate time series. Sensors 2014, 14, 5552–5572. [Google Scholar] [CrossRef] [PubMed]
- Lei, M.; Wang, Q.; Liu, X.; Xu, B.; Zhang, H. Influence of ocean tidal loading on InSAR offshore areas deformation monitoring. Geod. Geodyn. 2017, 8, 70–76. [Google Scholar] [CrossRef] [Green Version]
- Peng, W.; Wang, Q.; Cao, Y. Analysis of Ocean Tide Loading in Differential InSAR Measurements. Remote Sens. 2017, 9, 101. [Google Scholar] [CrossRef]
- Krasna, H.; Bohm, J.; Schuh, H. Tidal Love and Shida numbers estimated by geodetic VLBI. J. Geodyn. 2013, 70, 21–27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farrell, W.E. Deformation of the Earth by surface loads. Rev. Geophys. 1972, 10, 761–797. [Google Scholar] [CrossRef]
- Penna, N.T.; Bos, M.S.; Baker, T.F.; Scherneck, H.G. Assessing the accuracy of predicted ocean tide loading displacement values. J. Geod. 2008, 82, 893–907. [Google Scholar] [CrossRef] [Green Version]
- Bos, M.S.; Penna, N.T.; Baker, T.F.; Clarke, P.J. Ocean tide loading displacements in western Europe: 2. GPS-observed anelastic dispersion in the asthenosphere. J. Geophys. Res. Solid Earth 2015, 120, 6540–6557. [Google Scholar] [CrossRef]
- Schenewerk, M.S.; Marshall, J.; Dillinger, W. Vertical ocean-loading deformations derived from a global GPS network. J. Geod. Soc. Jpn. 2001, 47, 237–242. [Google Scholar]
- Allinson, C.R.; Clarke, P.J.; Edwards, S.J.; King, M.A. Stability of direct GPS estimates of ocean tide loading. Geophys. Res. Lett. 2004, 31, L15603. [Google Scholar] [CrossRef]
- King, M.A.; Penna, N.T.; Clarke, P.J.; King, E.C. Validation of ocean tide models around Antarctica using onshore GPS and gravity data. J. Geophys. Res. 2005, 110, B08401. [Google Scholar] [CrossRef]
- Thomas, I.D.; King, M.A.; Clarke, P.J. A Comparison of GPS, VLBI and Model Estimates of Ocean Tide Loading Displacements. J. Geod. 2006, 81, 359–368. [Google Scholar] [CrossRef]
- Yuan, L.G.; Chao, B.F. Analysis of tidal signals in surface displacement measured by a dense continuous GPS array. Earth Planet Sci. Lett. 2012, 355–356, 255–261. [Google Scholar] [CrossRef]
- Yuan, L.G.; Chao, B.F.; Ding, X.L.; Zhong, P. The tidal displacement field at Earth’s surface determined using global GPS observations. J. Geophys. Res. Solid Earth 2013, 118, 2618–2632. [Google Scholar] [CrossRef]
- Khan, S.A.; Tscherning, C.C. Determination of semi-diurnal ocean tide loading constituents using GPS in Alaska. Geophys. Res. Lett. 2001, 28, 2249–2252. [Google Scholar] [CrossRef]
- Khan, S.A.; Scherneck, H.-G. The M2 ocean tide loading wave in Alaska: Vertical and horizontal displacements, modelled and observed. J. Geod. 2003, 77, 117–127. [Google Scholar] [CrossRef]
- Yun, H.-S.; Lee, D.-H.; Song, D.-S. Determination of vertical displacements over the coastal area of Korea due to the ocean tide loading using GPS observations. J. Geodyn. 2007, 43, 528–541. [Google Scholar] [CrossRef]
- Melachroinos, S.A.; Biancale, R.; Llubes, M.; Perosanz, F.; Lyard, F.; Vergnolle, M.; Bouin, M.N.; Masson, F.; Nicolas, J.; Morel, L.; et al. Ocean tide loading (OTL) displacements from global and local grids: Comparisons to GPS estimates over the shelf of Brittany, France. J. Geod. 2007, 82, 357–371. [Google Scholar] [CrossRef]
- Vergnolle, M.; Bouin, M.N.; Morel, L.; Masson, F.; Durand, S.; Nicolas, J.; Melachroinos, S.A. GPS estimates of ocean tide loading in NW-France: Determination of ocean tide loading constituents and comparison with a recent ocean tide model. Geophys. J. Int. 2008, 173, 444–458. [Google Scholar] [CrossRef]
- King, M. Kinematic and static GPS techniques for estimating tidal displacements with application to Antarctica. J. Geodyn. 2006, 41, 77–86. [Google Scholar] [CrossRef]
- Ito, T.; Okubo, M.; Sagiya, T. High resolution mapping of Earth tide response based on GPS data in Japan. J. Geodyn. 2009, 48, 253–259. [Google Scholar] [CrossRef]
- Ito, T.; Simons, M. Probing Asthenospheric Density, Temperature, and Elastic Moduli Below the Western United States. Science 2011, 332, 947–951. [Google Scholar] [CrossRef] [PubMed]
- Tu, R.; Zhao, H.; Zhang, P.; Liu, J.; Lu, X. Improved Method for Estimating the Ocean Tide Loading Displacement Parameters by GNSS Precise Point Positioning and Harmonic Analysis. J. Surv. Eng. 2017, 143, 04017005. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, Q.; Tu, R.; Liu, Z. Analysis of ocean tide loading displacements by GPS kinematic precise point positioning: A case study at the China coastal site SHAO. Surv. Rev. 2017, 51, 172–182. [Google Scholar] [CrossRef]
- Penna, N.T.; Clarke, P.J.; Bos, M.S.; Baker, T.F. Ocean tide loading displacements in western Europe: 1. Validation of kinematic GPS estimates. J. Geophys. Res. Solid Earth 2015, 120, 6523–6539. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010). In IERS Technical Note No.36; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Geng, J.; Teferle, F.N.; Meng, X.; Dodson, A.H. Kinematic precise point positioning at remote marine platforms. GPS Solut. 2010, 14, 343–350. [Google Scholar] [CrossRef]
- Pawlowicz, R.; Beardsley, B.; Lentz, S. Classical tidal harmonic analysis including error estimates in MATLAB using T_TIDE. Comput. Geosci. 2002, 28, 929–937. [Google Scholar] [CrossRef]
- Bernese GNSS Software Version 5.2. Available online: http://www.bernese.unibe.ch/ (accessed on 20 October 2018).
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]
- Ray, R.D. Precise comparisons of bottom-pressure and altimetric ocean tides. J. Geophys. Res. Oceans 2013, 118, 4570–4584. [Google Scholar] [CrossRef] [Green Version]
- Stammer, D.; Ray, R.D.; Andersen, O.B.; Arbic, B.K.; Bosch, W.; Carrère, L.; Cheng, Y.; Chinn, D.S.; Dushaw, B.D.; Egbert, G.D.; et al. Accuracy assessment of global barotropic ocean tide models. Rev. Geophys. 2014, 52, 243–282. [Google Scholar] [CrossRef] [Green Version]
- International Mass Loading Service: Tidal Ocean Loading. Available online: http://massloading.net/toc/ (accessed on 20 October 2018).
- Ocean Tide Loading Provider. Available online: http://holt.oso.chalmers.se/loading/ (accessed on 20 October 2018).
- Scherneck, H.-G. A parametrized solid earth tide model and ocean tide loading effects for global geodetic baseline measurements. Geophys. J. Int. 1991, 106, 677–694. [Google Scholar] [CrossRef] [Green Version]






| Name | Harmonic Constituent | Period/h |
|---|---|---|
| M2 | Principal lunar semi-diurnal | 12.4206 |
| S2 | Principal solar semi-diurnal | 12.0000 |
| N2 | Larger lunar elliptic semi-diurnal | 12.6583 |
| K2 | Luni-solar declinational semi-diurnal | 11.9672 |
| K1 | Luni-solar declinational diurnal | 23.9345 |
| O1 | Principal lunar declinational diurnal | 25.8193 |
| P1 | Principal solar declinational diurnal | 24.0659 |
| Q1 | Lunar elliptic diurnal | 26.8680 |
| Station | Longitude (E) | Latitude (N) | Ellipsoidal Height/m | Data Length/d | % of Gross Errors |
|---|---|---|---|---|---|
| HKFN | 114°08′17″ | 22°29′41″ | 41.212 | 3628 | 1.57% |
| HKKT | 114°04′00″ | 22°26′41″ | 34.576 | 3640 | 1.06% |
| HKLT | 113°59′48″ | 22°25′05″ | 125.922 | 3650 | 1.23% |
| HKMW | 114°00′11″ | 22°15′21″ | 194.946 | 3529 | 4.58% |
| HKNP | 113°53′38″ | 22°14′57″ | 350.672 | 3643 | 1.15% |
| HKOH | 114°13′43″ | 22°14′52″ | 166.401 | 3646 | 1.08% |
| HKPC | 114°02′16″ | 22°17′05″ | 18.130 | 3638 | 1.23% |
| HKSC | 114°08′28″ | 22°19′20″ | 20.239 | 3594 | 2.61% |
| HKSL | 113°55′41″ | 22°22′19″ | 95.297 | 3652 | 0.92% |
| HKSS | 114°16′09″ | 22°25′52″ | 38.713 | 3645 | 1.11% |
| HKST | 114°11′03″ | 22°23′43″ | 258.704 | 3651 | 0.93% |
| HKWS | 114°20′07″ | 22°26′03″ | 63.791 | 3652 | 0.89% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, G.; Wang, Q.; Peng, W. Accurate Evaluation of Vertical Tidal Displacement Determined by GPS Kinematic Precise Point Positioning: A Case Study of Hong Kong. Sensors 2019, 19, 2559. https://doi.org/10.3390/s19112559
Wei G, Wang Q, Peng W. Accurate Evaluation of Vertical Tidal Displacement Determined by GPS Kinematic Precise Point Positioning: A Case Study of Hong Kong. Sensors. 2019; 19(11):2559. https://doi.org/10.3390/s19112559
Chicago/Turabian StyleWei, Guoguang, Qijie Wang, and Wei Peng. 2019. "Accurate Evaluation of Vertical Tidal Displacement Determined by GPS Kinematic Precise Point Positioning: A Case Study of Hong Kong" Sensors 19, no. 11: 2559. https://doi.org/10.3390/s19112559