1. Introduction
The safety of infrastructures such as bridges and high-rise buildings is of the utmost concern to the public. During operation, civil structures are subjected to various kinds of external loads, such as traffic, wind, temperature, etc. In fact, these evolving loads may be much more complicated than those considered in the design phase. Therefore, it is of importance to monitor the structural responses, such as strain, displacement, and acceleration with the aim of assessment of their real-time states. Nowadays, long-term structural health monitoring (SHM) systems are widely used to acquire data of structural responses, as well as external loads to monitor the states of civil structures. However, how to process and analyze these data for identifying possible structural changes has been a great challenge [
1,
2]. In general, structural responses may not change evidently when only a small amount of damage is imparted. Moreover, response variations may be masked by the uncertainties in the structural parameters of practical structures, as well as by the presence of noise. All of these factors result in the raw data being uninformative regarding the occurrence of structural changes, therefore, resulting in the need for feature extraction of measurement data [
3]. In order to detect damage effectively, the extracted features are required to be sensitive to damage, while insensitive to parametric uncertainties or noise.
Damage detection methods can be generally classified into two categories, namely model-based [
4] and model-free methods [
5]. Model-based methods require an accurate finite-element model as well as a model-updating process for damage identification [
6]. They have the ability not only to identify the presence and location of damage but also to quantify it in meaningful engineering units. However, computational complexity and model updating of these methods, especially for large-scale structures, have been a challenge in SHM [
5]. As an alternative, model-free methods have drawn much attention for the sake that they have been demonstrated applicable to damage identification [
7]. These methods utilize time series of measurement data for analysis without the need for geometrical and material information. Due to this reason, they are more inexpensive and efficient compared to model-based methods.
During the past few decades, various kinds of model-free data-interpretation methods for damage detection have been developed, including the autoregressive (AR) model, autoregressive moving average (ARMA) model, autoregressive integrated moving average (ARIMA) model, correlation analysis (CA), instance-based method (IBM), wavelet-based (WB) methods, neural network (NN) model, robust regression algorithm (RRA), principal component analysis (PCA), etc. AR establishes a time-series model to predict future values based on the past measured data. Residual errors or AR parameters are usually used as sensitive features for damage detection [
8,
9]. ARMA and ARIMA, which are improved methods compared to AR, also take advantage of coefficients as indices for identifying damage [
10,
11]. CA detects damage through variations of correlation coefficients for measurement datasets since the correlation coefficients will change when damage occurs. This method has been demonstrated to have good performance with regard to identifying and localizing damage [
12]. However, it fails to identify damage when the measurement noise is at high levels [
13]. IBM computes the minimum distance of a cluster of sensor data (generally for three or four sensors) at each time step [
14]. The occurrence of damage is determined if the phase of the minimum distance exceeds a threshold [
15]. WB methods are also effective tools for on-line and off-line damage detection [
16]. These methods firstly decompose original signals in different time domains and scales. Then, mode shapes, wavelet spectra, wavelet component energy, and the tendency of wavelet coefficients are selected as sensitive features to detect damage [
17,
18,
19,
20]. The NN model has been widely utilized to identify anomalous structural behavior by using static and dynamic responses [
21,
22]. The number of hidden layers, the number of neurons in each layer, the neuron activation function and error criteria should be carefully considered in the NN method [
23]. Some investigators also verified that incorporating other methods into a traditional NN model significantly enhances the effectiveness of damage detection [
24,
25]. As for RRA, it is focused on the correlation between a pair of sensors and construction of a robust regression relationship for measurement data [
26]. An anomaly is identified when correlation coefficients exceed threshold bounds. This method has demonstrated the ability to identify and localize damage in simple as well as complex structures [
27].
PCA is another popular method used for damage identification in long-term SHM. It exhibits reliable and effective performance in modal analysis, reduced-order modelling, feature extraction, and structural damage detection [
28,
29,
30,
31,
32]. In addition, it proves to be an effective tool to improve the training efficiency and enhance the classification accuracy for other machine learning algorithms, such as unsupervised learning methods [
33,
34,
35,
36,
37]. Since the total historical dataset including responses of both healthy and damaged states is involved in the analysis process, PCA is not sensitive to the occurrence of damage in real time in SHM. Moreover, large amounts of historical data may cause computational complexity. Posenato et al. then proposed the moving PCA (MPCA) method to enhance discrimination features between undamaged and damaged structural responses [
13,
27,
38]. This method essentially uses a sliding fixed-size time window for time-series data instead of handling the total historical dataset. An eigenvector time series will be obtained as the time window moves forward. The components of the most important eigenvector are utilized as sensitive features for damage detection. Due to the moving temporal window, MPCA enhances the detection effectiveness compared to that of the traditional PCA method through monitoring the evolution of eigenvector components between undamaged and damage states. In other words, MPCA is used to monitor the components of the eigenvector variance (CEVs) between a healthy state and damaged state for damage identification. It was demonstrated that the sensitivity of MPCA for damage identification was significantly improved compared to other methods such as ARIMA, CWT, RRA and IBM [
12,
13,
39]. However, in the data-interpretation process of both PCA and MPCA, data from all sensors should be used to calculate the eigenvalues and eigenvectors. It makes sense that responses located far from the damaged area are insensitive to damage. In other words, part of the data includes information insensitive to damage, consequently reducing the sensitivity regarding damage detection. If a space window is applied to exclude the data from those sensors located far from the damage, it is possible to improve the damage detectability. As a consequence, if both space and time windows are applied in the traditional PCA method, this is expected to further improve the damage detectability. In fact, Posenato et al. have also proposed a sensor clustering overlapping algorithm for MPCA when there exists a large number of sensors [
13]. The clustering process is essential to implement space windows for the installed sensors. However, the authors aimed to deal with measurements from fewer sensors for computational efficiency. They did not carry out further investigation on the damage detectability.
According to the above discussion, both PCA and MPCA methods use all sensors for analysis and may decrease the detection performance. This paper will provide a double-window PCA (DWPCA) method for structural damage identification. The primary idea is to combine space and time windows with the traditional PCA method. It is found that discrimination of the eigenvectors between damaged and healthy states is enhanced due to the introduction of space and time windows. Numerical results show that the proposed method, in contrast with MPCA, improves the sensitivity for damage identification and is also quicker to detect damage after its occurrence. Further investigations indicate that the novel approach exhibits a better performance regarding damage localization and quantitative evaluation. Finally, the proposed DWPCA is shown to be robust in the presence of noise and shows potential for applications in practical engineering.
This paper is organized as follows:
Section 2 describes PCA, MPCA and the proposed DWPCA method.
Section 3 presents a detailed description of the planar beam model for simulations, as well as the methodology to determine the space window. In
Section 4, comparative studies with MPCA are conducted to verify the advantages of the proposed method. In
Section 5, application of the proposed DWPCA to a full-scale structure is presented. In
Section 6, valuable conclusions are drawn according to the numerical results.
2. The Proposed Double-Window Principal Component Analysis Method
In the following, the descriptions of PCA, MPCA, and the proposed DWPCA method will be presented in sequence. It should be noted that MPCA introduces a moving time window in the traditional PCA method, while the proposed DWPCA introduces both space and time windows.
2.1. PCA
PCA is a useful tool for reducing data dimensionality while retaining essential information for manipulated datasets. The main objective is to transform original data to a smaller set of uncorrelated variables [
40]. For damage detection, PCA can be used to eliminate noise and simultaneously derive damage-sensitive features such as eigenvectors. The data-processing steps of PCA are detailed as below. The first step of PCA is the construction of a matrix,
, that contains the time histories of all measured data:
where
t represents time,
denotes the response from the
i-th sensor installed in the monitored structure,
M is the total sensor number,
denotes the
j-th time step of measurements, and
N is the total number of time observations during monitoring. Note that the data of each column are the time series of measurement events from each individual sensor.
Subsequently, time series of each column or each sensor should be normalized by subtracting the mean value given by:
The normalized matrix can then be written as:
The next step is to construct the
covariance matrix, which is defined as:
Finally, the eigenvalue
and the corresponding eigenvector
of the covariance matrix can be obtained by solving the following equation:
where
denotes the
identity matrix,
in which
is the component corresponding to the
sensor.
Generally, one would sort the eigenvalues into decreasing order, namely . Then, the first eigenvector related to contains the largest variance and thereby retains essential information for the original matrix U. In fact, most of the variance is contained in the first few principal components, while the remaining less important components involve the measurement of noise. For this reason, the first few eigenvectors are always used as sensitive features to detect and localize damage. It can be seen that neither a space window nor time window is applied in PCA. The total historical dataset including responses of healthy and damaged states is used for analysis, thereby leading to low damage detectability.
2.2. MPCA
MPCA is an improved method based on PCA which involves applying a moving time window of fixed size. Only the time series of observations inside the moving time window are used to construct the covariance matrix for the derivation of eigenvalues and eigenvectors. Previous studies have proven that the introduction of the moving time window enhances the discrimination between features of undamaged and damaged structures, and thereby renders better performance for damage detection [
14,
26]. Additionally, the sensitivity of MPCA for damage identification has proven to be significantly improved as compared with other methods such as PCA, ARIMA, DWT, RRA and IBM [
12,
13,
39]. The proper choice of the window size
T is also important in the first step. If the response time series have periodic characteristics, the temporal window size should be equivalent to the longest period. Once the time window size or the number of consecutive measurements for each sensor inside the window is fixed, the matrix
U in Equation (1) at the
k-th time step can be rewritten as:
where
. Note that the mean value of each column of
at the
k-th time step would become,
Next, repeating the steps of PCA, one is able to obtain the eigenvalue and eigenvector . It should be noted that and are time series and vary with the time step.
During continuous monitoring, responses are divided into two phases: training and monitoring phases. In the training phase, the structure is assumed to behave normally (no damage). Then, eigenvector variance between the training phase and the monitoring phase at the
time step can be determined by the following equation:
where
denotes the mean value of the
eigenvector in training phase, while
represents the eigenvector variance between
and
at the
time step of the monitoring phase, and
where
is the component of the eigenvector variance (CEV) corresponding to the
sensor. It should be noted that
is generally utilized as the feature for anomaly detection in MPCA. CEV
by MPCA can be expressed in terms of eigenvector components as follows:
where
denotes the mean value of the eigenvector component in a healthy state, and
can be considered as the variation between
in monitoring phase and
in healthy state. If
exceeds a threshold, alarm will be flagged.
When damage occurs, structural responses may change, consequently causing variations in eigenvectors and CEVs. Thus, one may follow the over time to examine whether damage exists. As indicated in Equation (6), MPCA uses only the latest T observations instead of the whole time series. Once damage occurs, fewer data that are irrelevant to the damage, as compared with PCA, are considered for the calculation, resulting in a better sensitivity for damage detection. However, MPCA generally takes into account responses from all sensors. Some of the sensors may be insensitive to damage located at a certain position. If a space window is used to group sensitive sensors, it is possible to enhance damage detectability.
2.3. The Proposed DWPCA
When damage occurs, data from sensors close to damage location change significantly while data from sensors away from damage may be unchanged. Hence, a novel DWPCA method is proposed herein to combine space and time windows with PCA. It can also be treated as an improved method for MPCA by the introduction of a space window. The application of the space window, in the aim of enhancing damage detectability, is to group sensors sensitive to damage and to exclude those that are insensitive. The key step for the choice of the space window is to determine the damage-sensitive area (DSA), where measurement data change significantly when damage occurs. It should be noted that the DSA varies with damage location as well as damage level. For example, the damage location commonly decides the position of the DSA and a high damage level reasonably leads to a large DSA.
For the space window, a criterion as shown below is used for determination of the damage-sensitive sensors which fall within the DSA:
where the superscripts
and
denote damaged and healthy states, respectively. For each measurement time step,
represents the data from the
i-th sensor in a damaged case, and
represents the response in a healthy state.
is the lowest limit of a detectable relative change in response. Note that
represents the variation of response under a damage condition. If
is lower than the sensor sensitivity, it is impossible to detect the damage. Therefore,
should be chosen as the sensor sensitivity. It should be noted that Equation (10) only applies to responses which are sensitive to local damage. And in this paper, strains are used in the analysis. However, Equation (10) may not be applicable to vibration monitoring, due to the fact that vibration responses are integral structural effects and may not be sensitive to local damage.
A sensor is defined as damage-sensitive if the responses it acquires in the case of damage satisfy the following formula:
where
represents the total number of observations over time,
represents the total number of observations satisfying Equation (10),
is a given constant parameter that determines the lowest possibility to define a damage-sensitive sensor. In fact, it is difficult to determine the exact value for
because it depends on the specific structures. In general, an approximate range for
can be given as from 50% to 100%. This means if more than half of all observations at a certain scenario satisfy Equation (10), then a sensor can be treated as damage-sensitive. Once an accurate FE model is given, an accurate method for determining DSA according to Equation (11) can be provided based on numerical simulations of various damaged cases (various combinations of damage locations and severities are considered). Consequently, the space window can be defined as the set of sensors installed in DSA. However, it is not possible to provide an accurate method to determine the DSA without an accurate FE model, because the determination of DSA depends on specific structures including materials, types of structures and boundary conditions. In such case, only empirical experience is available to determine the DSA and the space window. For example, one can use diverse space windows of which each involves several neighboring sensors. Because damage in general has more effects on those sensors which are nearby, the space window that is nearest to the location of the damage is most likely to group the sensors that are more sensitive to damage.
The space window is presented in the form of
, where
are the sensor numbers, and
represents the total number of sensors in the space window, in other words, within the DSA. For example,
means Sensor 1, Sensor 3, Sensor 5, and Sensor 7 are grouped inside the space window. Once the window is determined, one can conduct PCA with a moving time window for measurement values to detect damage. In consideration of space and time windows, Equation (6) can be rewritten as:
Then, repeating the steps of PCA, one is able to obtain the time-variant eigenvector
. Similarly, with
Section 2.2, herein
by DWPCA in a spatial window can be obtained from Equation (9). By following the CEV
at each time step, damage can be detected if
exceeds a certain threshold value. Meanwhile, it is possible to localize damage through the space window by observing rapidly changing components. It can be seen in Equation (12) that only sensitive responses are considered in the analysis for DWPCA. Thus, it is expected to improve the performance of damage identification.
5. Application to a Full-Scale Structure
Based on the validation for DWPCA with a planar beam in
Section 3 and
Section 4, in this section, further investigation of the performance of DWPCA for a large-scale structure will be carried out to demonstrate its applicability for practical engineering purposes. The full-scale FE model will be based on the Xijiang Bridge in Zhaoqing, China. The bridge is a continuous rigid frame bridge built in 2004 in the Guangdong province, China. It consists of seven spans with a total length of 808 m. The photograph and schematic diagram of its structure are presented in
Figure 14. Properties of the bridge are summarized in
Table 3.
In order to demonstrate the sensitivity of DWPCA for damage detection of the full-scale structure, response data from different damage scenarios should be prepared. Since the bridge is in good conditions after the completion of construction stages, there are no damage events that could have generated unusual structural behavior. For the purposes of application of DWPCA on real structures, a full-scale FE model of the bridge is established. The strain responses under seasonal temperature variations presented in
Figure 2 in
Section 3 are obtained. Continuous structural health monitoring responses of four years at a sampling frequency of four measurements per day are collected.
Local damage is assumed to be introduced in the span between the 2# and 3# piers of the bridge, as shown in
Figure 14b. Sensors are embedded every 5 m along the bridge length, as shown in
Figure 15a. The arrangement of the sensor locations on the top, webs and bottom of the girder box are given in
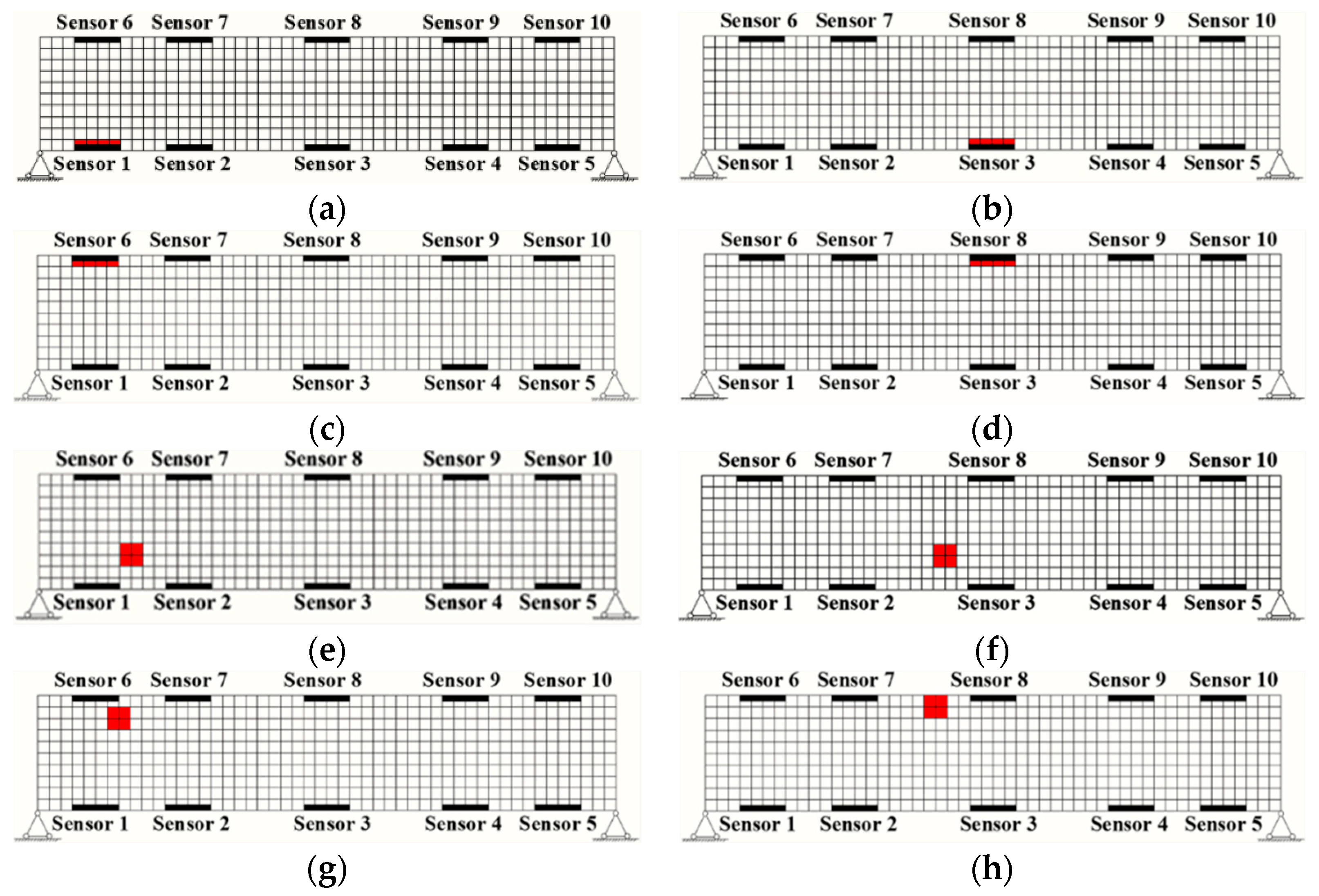
Figure 15b. Note that there are 29 monitoring sections, and each section has six sensors installed in this span. Thus, there are 174 sensors in total and these are numbered from top to bottom, from left to right (Section ① to Section ㉙) in sequence. In the FE model, damage is assumed to be at a specific element of the bridge with a permanent stiffness reduction and is introduced at the beginning of the third year. Two different damage scenarios with different damage locations marked as red are shown in
Figure 16a,b:
- (1).
Scenario A: Damage between Section ① and Section ② in the vicinity of Sensor 8 and Sensor 10, as shown in
Figure 16a;
- (2).
Scenario B: Damage between Section ⑭ and Section ⑮ close to Sensor 84, as shown in
Figure 16b.
Space windows which are related to the DSA should be determined. During the DSA analysis in this section, the parameter in Equation (10) is equal to 5%. The in Equation (11) is set to be 60%. After simulations for a large number of damage scenarios, it was found that the DSA is more likely to lie within two neighboring monitoring sections that are located close to the damage. Especially, when the damage is located quite close to one monitoring section, the DSA is located in the vicinity of this section. The space windows considered herein contain sensors from two neighboring monitoring sections or from one section that is closest to the damage. Thus, for brevity of demonstration, only the following spatial windows are used for comparative studies between MPCA and the proposed DWPCA:
- (a)
Window A involving all the sensors: ;
- (b)
Window B involving sensors from Section ① and Section ②: ;
- (c)
Window C involving sensors from Section ⑭ and Section ⑮: ;
- (d)
Window D involving sensors from Section ①: ;
- (e)
Window E involving sensors from Section ②: ;
- (f)
Window F involving sensors from Section ⑭: ;
- (g)
Window G involving sensors from Section ⑮: .
Comparative studies of CEVs computed by MPCA () and DWPCA (), respectively, on damage detection for this bridge are presented as follows. Window A is still used in MPCA. Other windows including Window B to Window G will belong to the DWPCA method in the following demonstration.
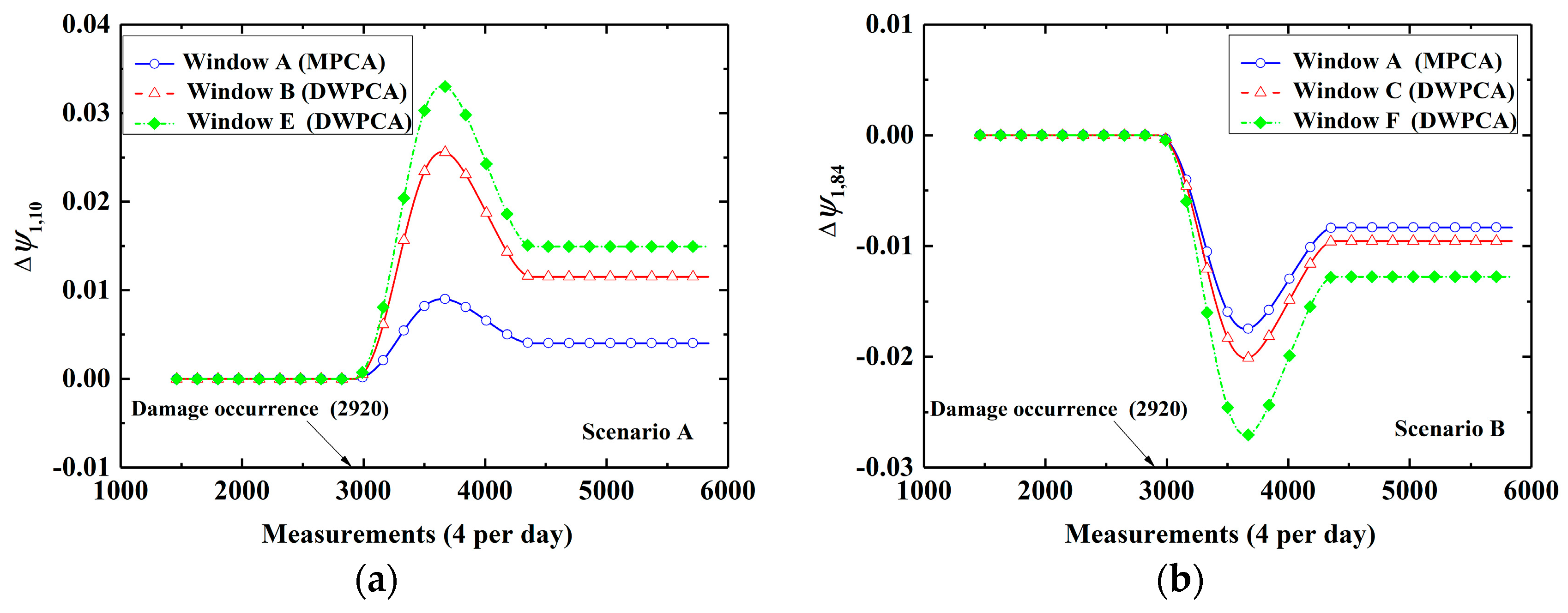
Figure 17 shows the evolution of CEVs by MPCA and DWPCA upon application in two different damage scenarios. Similarly to that of the planar beam, there are no relative variations in the corresponding CEVs in the first two years since there is no damage. In addition, there exists a shift after damage occurrence in all scenarios when the time window involves responses from both damaged and healthy states. Then, the corresponding CEVs will become stable again after 4380 measurement events when responses within the time window are obtained from the damaged structure after 4380 measurements. Note that a more significant change of corresponding CEVs by the proposed DWPCA method with Window B, C, E, or F are observed in contrast to MPCA with Window A in both scenarios. Additionally, Windows E and F, which consist of sensors from only one monitoring section, perform better than Windows B and C, which contain sensors from two neighboring monitoring sections, when damage is located quite close to one monitoring section.
After the investigation of DWPCA in damage identification in the bridge, a closer look at all CEVs evolutions within a spatial window will be further explored for damage localization.
Figure 18a shows the evolution of CEVs computed by DWPCA with Window D and E for Scenario A, in which the damage is located between Section ① and Section ②, close to Sensor 10. For Window D and E, as shown in
Figure 18a, the CEVs corresponding to Sensor 7, Sensor 8, Sensor 9 and Sensor 10 shows an evident shift after damage occurrence as compared with other sensors which are located far from damage. This is due to the fact that Sensor 7, Sensor 8, Sensor 9 or Sensor 10 is the nearest to damage in the corresponding space window. For Scenario B in
Figure 18b, as expected, the CEV related to Sensor 84 is the most evident because the damage is in the vicinity of Sensor 84.
Figure 18b also indicates that the CEVs corresponding to Sensor 81, Sensor 82, and Sensor 83, which are close to damage, also have a remarkable shift after damage occurrence. It is seen that DWPCA can be used to localize damage with the aid of various space windows for complex engineering structures.
Based on the discussion in
Section 4.3, the relationship between the damage level and stable absolute value of CEV after damage occurrence for a range of damage severities in simple beams can be quantitatively evaluated. Similarly, for Scenarios A, the damage level
can be quantitatively evaluated in terms of
by DWPCA with Window E in
Figure 19a, as indicated by:
As for DWPCA with Window F for Scenario B, as presented in
Figure 19b, the damage level
can also be obtained from the calculated
with the use of the following equation:
In summary, the proposed method DWPCA is demonstrated to be feasible for damage detection for large-scale structures. Results show that, similarly with the conclusion drawn in
Section 4 for the planar beam, DWPCA has better performance in damage identification, damage localization and damage quantitative evaluation, as compared with the previous method MPCA. The is due to that the space windows used in DWPCA are capable of excluding damage-insensitive data from those sensors located far from the damage to enhance the damage detectability The proposed method is proven to have potential in applications for practical engineering.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}