Approximate Optimal Deployment of Barrier Coverage on Heterogeneous Bistatic Radar Sensors

Abstract
:1. Introduction
- We investigate the coverage differences of the basic placement of different types of BR transmitters and receivers on the line barrier. We find out and prove the optimal basic placement spacing sequences (patterns) of heterogeneous BR sensors on a line. Then, we investigate the coverage coupling effect among adjacent different types of transmitters in the placement sequence on the heterogeneous barrier. Different with homogeneous BR barrier, we discover that placement sequences of different types of BR transmitters on line barrier affect the barrier’s coverage length under same motoring threshold. The optimal placement sequence of heterogeneous BR barrier could not be solved through the greedy algorithm directly.
- We determine that when the placement orders for heterogeneous transmitters are determined on the barrier, we can construct the optimal BR sensor placement spacing sequence on the line barrier with a predefined monitoring threshold.
- Through extensive simulation experiments, we determine that the different placement sequences of heterogeneous transmitters on the line barrier have little influence on barrier’s maximum length under a predefined monitoring threshold. We then propose an approximate algorithm to solve the optimal deployment of heterogeneous BR barrier with a very small coverage range of errors and achieve maximum monitoring performance.
- As a heterogeneous barrier case study, we present a minimum cost coverage algorithm of heterogeneous BR barrier further.
- Finally, we validate the effectiveness of the proposed algorithms through theoretical analysis and extensive simulation experiments.
2. Related Works
3. Sensor Model and Problem Definition
3.1. BR Sensor Model
3.2. Problem Definition
| Algorithm 1 Compute the optimal deployment for Problem 1 | |
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | |
| 7. | |
| 8. | |
| 9. | |
| 10. | |
| 11. | |
4. Constructing Heterogeneous BR Barrier with Approximate Optimal Performance
- First, we analyze the basic deployment sequences of different types of transmitters and receivers.
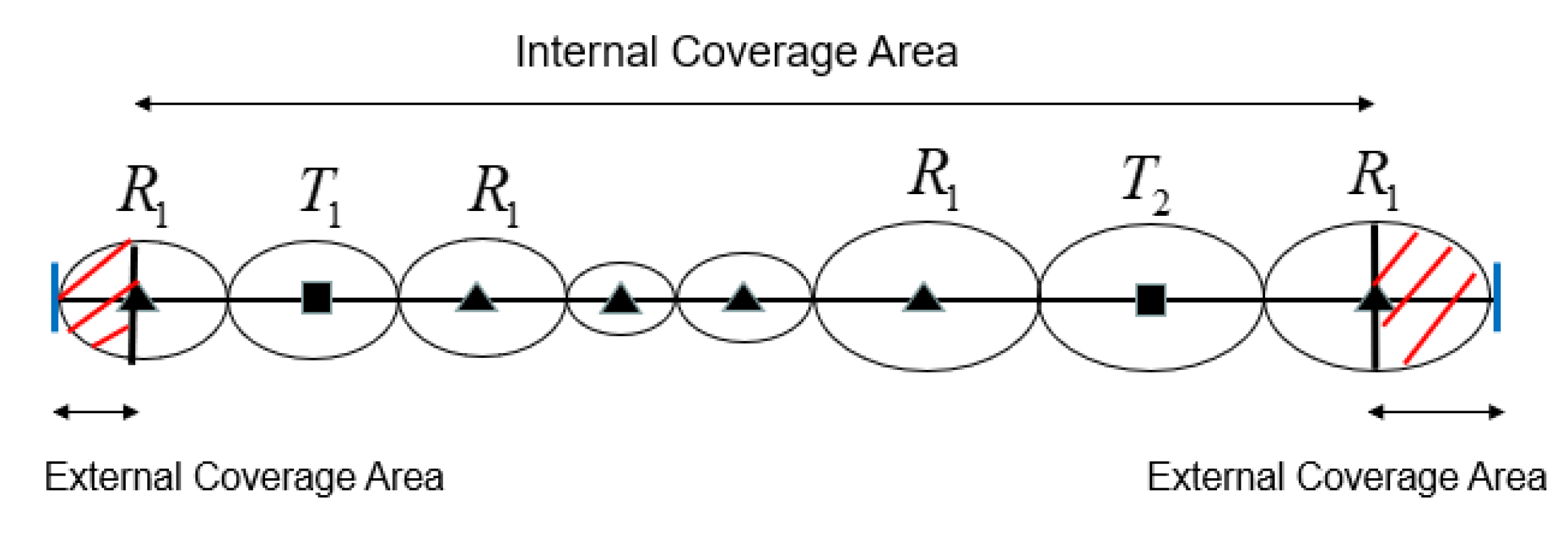
- We divide the barrier as the internal and external edge coverage areas, and discuss the internal area’s placement schema and external edge areas’ placement schema separately;
- Then, we introduce the basic placement sequence of BR transmitters and receivers, and prove the maximum placement interval on the internal and external coverage areas of heterogeneous transmitters and receivers on the line BR barrier.
- Based on the above results of basic placement sequence, we investigate Problem 2 which builds the longest line barrier under a given SNR threshold and a numbers of heterogeneous sensors.
- We consider the effect of combination orders of basic placement sequences of different types of transmitters and receivers to the barrier length. We find that the combination orders of different types of transmitters affect to the barrier length because there have cover coupling effect among different types of adjacent transmitters. It is difficult to find the optimal covering combination of different types of transmitters and receivers on a heterogeneous BR barrier through greedy algorithm to achieve optimal deployment performance.
- For a predetermined transmitter placement order, we propose an optimal placement algorithm (Algorithm 2) to construct the longest heterogeneous line barrier under a given SNR threshold and a numbers of heterogeneous BR sensors. We prove that Algorithm 2 is optimal placement solution for a predetermined transmitter placement order barrier. But it only partially solves Problem 2.
- We further investigate the influence of different transmitter placement order on the line barrier coverage length, and validate that the different placement orders of heterogeneous transmitters have a very small coverage range of errors on the barrier length through detailed experiments. Hence, we can use Algorithm 2 to obtain the length of the approximate longest line barrier and the approximate optimal placement scheme of heterogeneous BR sensors given a SNR threshold and a number of heterogeneous sensors. Thus, we solved Problem 2 with an optimal solution under a very small approximation error.
- Finally, based on Algorithm 2, we can use Algorithm 1 to obtain the approximate optimal monitoring performance of heterogeneous BR barrier through randomly determined placement order of heterogeneous transmitters and binary search.
4.1. Maximum Placement Interval Sequence on Homogeneous/Heterogeneous Barrier
4.1.1. Optimal Basic Placement Sequences on Homogeneous Barrier
Optimal Basic Placement Sequences in Internal Coverage Area of Homogeneous Barrier
- Whenisodd,.
- Whenis even,.Where, is the number of receivers.
4.1.2. Optimal Basic Placement Sequences on Heterogeneous Barrier
Optimal Basic Placement Sequences in Internal Coverage Area of Heterogeneous Barrier
- When,
- When,.Where,is the number of receivers.
Optimal Basic Placement Sequences in External Coverage Area of Heterogeneous Barrier
4.2. Effects of Different Combination Orders of Basic Placement Sequences on Barrier Length
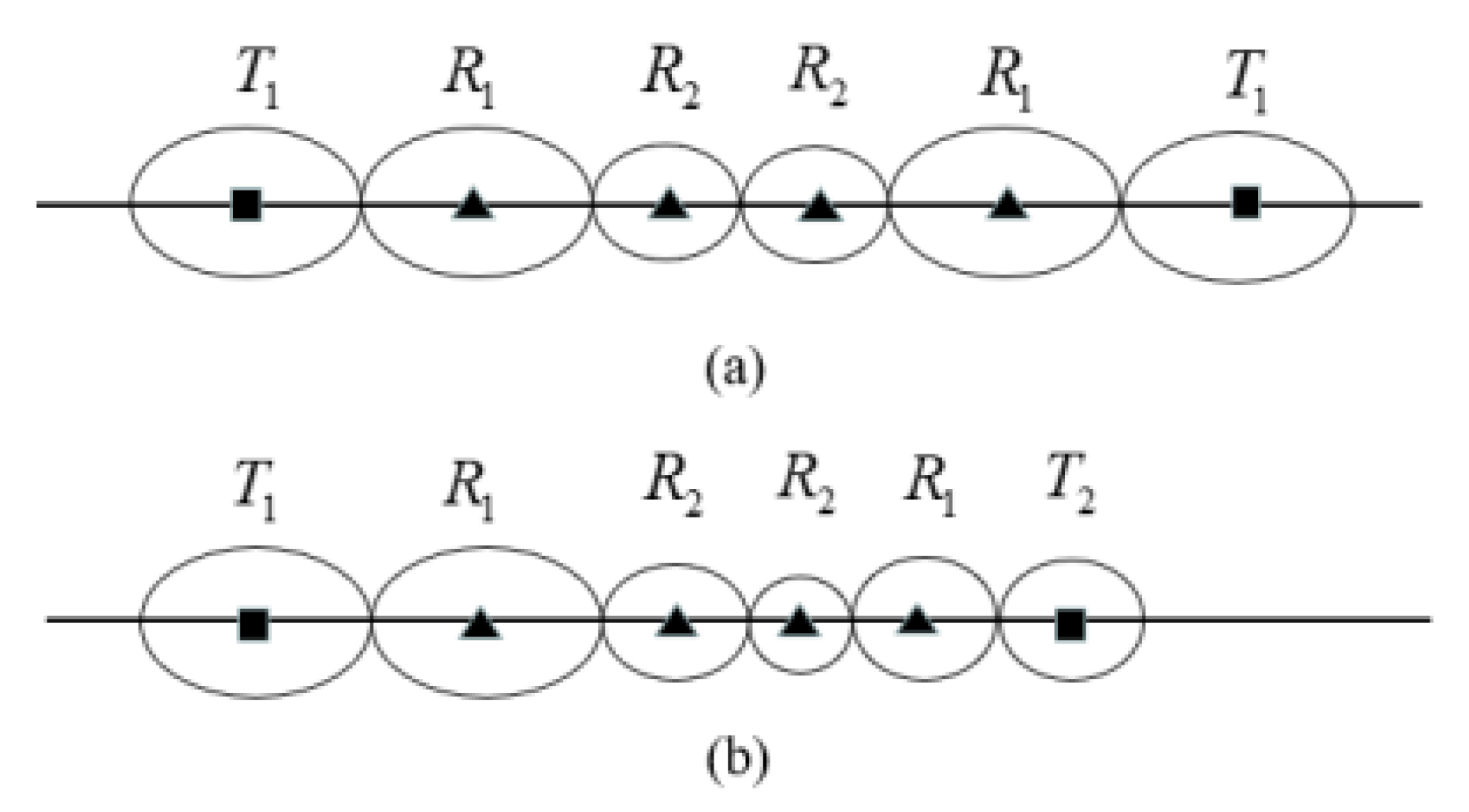
4.2.1. Differences of Basic Placement Sequence of Heterogeneous Transmitters
Different Combination Orders of Basic Placement Sequence
- (1)
- Firstly, for simplification, we consider how to construct the longest barrier when the all transmitters placement order is determined.
- (2)
- Then we investigate the influence of different placement orders of transmitters on the barrier’s coverage length and design an approximate algorithm of optimal placement sequence on heterogeneous line BR barrier with very small approximate accuracy error.
4.2.2. Construction of Longest Barrier When Heterogeneous Transmitters Placement Order Is Determined
- (1)
- For the internal coverage area, in Theorem 8, we know that if a receiver is inserted into any sequence , the coverage length of other sequences in the internal coverage area will not be affected. So, for a receiver , we choose to place it into the placement area () where the length of the barrier increases as long as possible. The increase of the barrier’s length when receiver is inserted into a placement area can be figured out by the maximum placement spacing interval methods in internal coverage area which are given in Section 4.1.1 and Section 4.1.2.
- (2)
- For the external coverage area, in Figure 17, we need to place a receiver in placement areas and . This situation is relatively simple. We only need to calculate the increased barrier length according to the maximum placement spacing interval method given in Section 4.1.1 and Section 4.1.2.
| Algorithm 2 Build the longest barrier when heterogeneous transmitters’ order is given. | |
| 12. | |
| 13. | |
| 14. | |
| 15. | |
| 16. | |
| 17. | |
| 18. | |
| 19. | |
| 20. | |
| 21. | |
| 22. | |
| 23. | |
| 24. | |
| 25. | |
| 26. | |
| 27. | |
| 28. | |
| 29. | |
| 30. | |
| 31. | |
| 32. | |
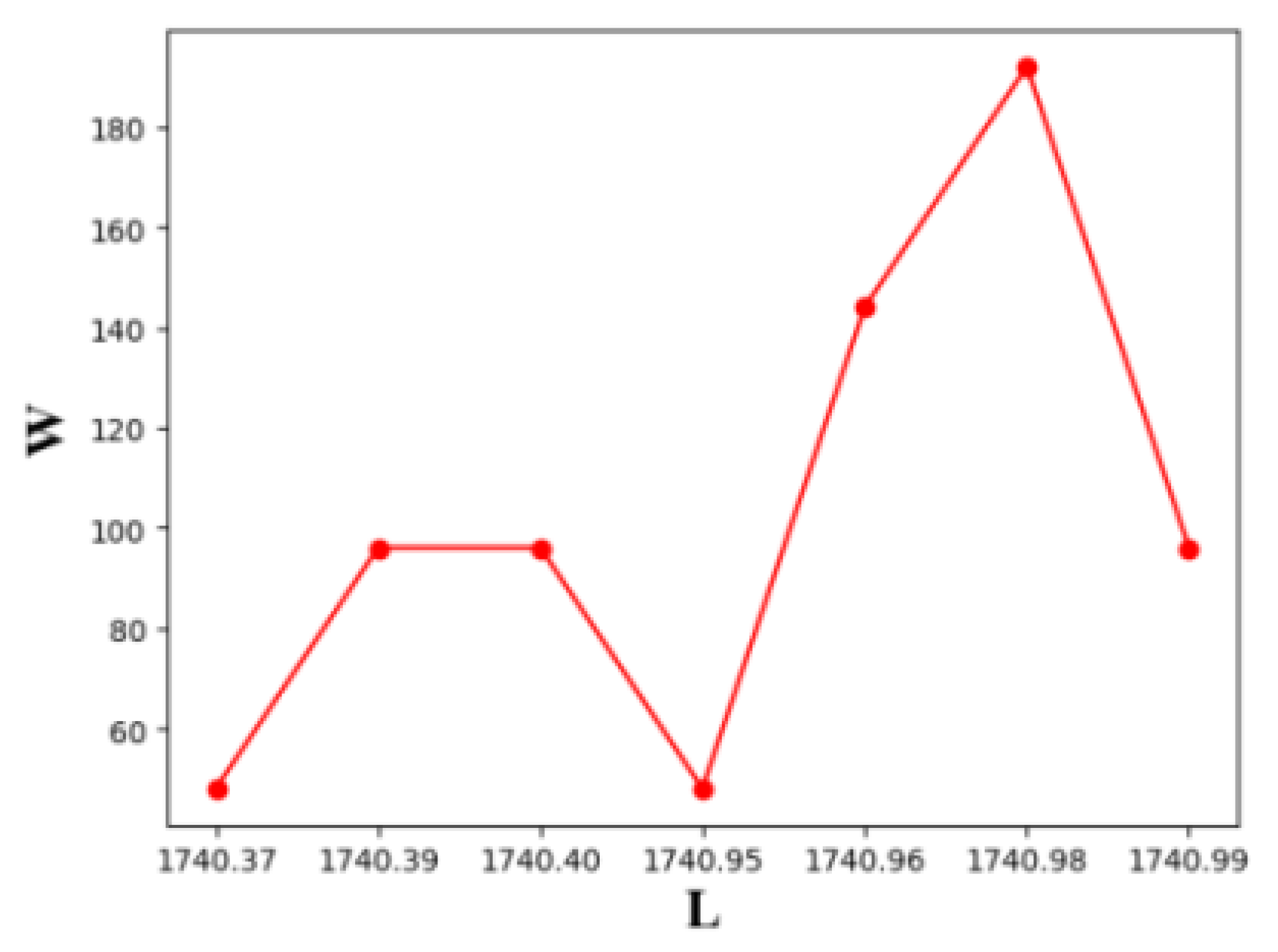
4.2.3. Effect of Different Placement Order of Heterogeneous Transmitters on BR Barrier Length
5. Minimum Cost deployment of Heterogeneous Line Barrier
| Algorithm 3 Compute the minimum cost of line barrier | |
| 33. | |
| 34. | |
| 35. | |
| 36. | |
| 37. | |
| 38. | |
| 39. | |
| 40. | |
| 41. | |
| 42. | |
| 43. | |
| 44. | |
| 45. | |
6. Simulation Experiments
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix






References
- Kong, L.; Liu, X.; Li, Z.; Wu, M.-Y. Automatic Barrier Coverage Formation with Mobile Sensor Networks. In Proceedings of the 2010 IEEE International Conference on Communication, Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Yildiz, E.; Akkaya, K.; Sisikoglu, E.; Sir, M.Y. Optimal Camera Placement for Providing Angular Coverage in Wireless Video Sensor Networks. IEEE Trans. Comput. 2014, 63, 1812–1825. [Google Scholar] [CrossRef]
- Wang, B.; Xu, H.; Liu, W.; Liang, H. A Novel Node Placement for Long Belt Coverage in Wireless Networks. IEEE Trans. Comput. 2013, 62, 2341–2353. [Google Scholar] [CrossRef]
- Saipulla, A.; Westphal, C.; Liu, B.; Wang, J. Barrier coverage with line-based deployed mobile sensors. Ad Hoc Netw. 2013, 11, 1381–1391. [Google Scholar] [CrossRef]
- Chen, J.; Wang, B.; Liu, W. Constructing perimeter barrier coverage with bistatic radar sensors. J. Netw. Comput. Appl. 2015, 57, 129–141. [Google Scholar] [CrossRef]
- Gong, X.; Zhang, J.; Cochran, D.; Xing, K. Optimal Placement for Barrier Coverage in Bistatic Radar Sensor Networks. IEEE/ACM Trans. Netw. 2016, 24, 1. [Google Scholar] [CrossRef]
- Wang, B.; Chen, J.; Liu, W.; Yang, L.T. Minimum cost placement of bistatic radar sensors for belt barrier coverage. IEEE Trans. Comput. 2015, 65, 577–588. [Google Scholar] [CrossRef]
- Yang, Q.; He, S.; Chen, J. Energy-efficient area coverage in bistatic radar sensor networks. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013. [Google Scholar]
- Chang, H.Y.; Kao, L.; Chang, K.P.; Chen, C. Fault-Tolerance and Minimum Cost Placement of Bistatic Radar Sensors for Belt Barrier Coverage. In Proceedings of the 2016 International Conference on Network and Information Systems for Computers (ICNISC), Wuhan, China, 15–17 April 2016. [Google Scholar]
- Tripathi, A.; Gupta, H.P.; Dutta, T.; Mishra, R.; Shukla, K.K.; Jit, S. Coverage and Connectivity in WSNs: A Survey, Research Issues and Challenges. IEEE Access 2018, 6, 26971–26992. [Google Scholar] [CrossRef]
- Chang, C.-Y.; Kuo, Y.-W.; Xu, P.; Chen, H. Monitoring Quality Guaranteed Barrier Coverage Mechanism for Traffic Counting in Wireless Sensor Networks. IEEE Access 2018, 6, 30778–30792. [Google Scholar] [CrossRef]
- Kim, H.; Oh, H.; Bellavista, P.; Ben-Othman, J. Constructing event-driven partial barriers with resilience in wireless mobile sensor networks. J. Netw. Comput. Appl. 2017, 82, 77–92. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Raimondo, P.; Tropea, M.; De Rango, F.; Aiello, C. An IoT Surveillance System Based on a Decentralised Architecture. Sensors 2019, 19, 1469. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J. A Collision-Free Surveillance System Using Smart UAVs in Multi Domain IoT. IEEE Commun. Lett. 2018, 22, 2587–2590. [Google Scholar] [CrossRef]
- Ruisong, H.; Wei, Y.; Li, Z. Achieving crossed strong barrier coverage in wireless sensor network. Sensors 2018, 18, 534. [Google Scholar]
- Zhao, Q.; Gurusamy, M. Lifetime Maximization for Connected Target Coverage in Wireless Sensor Networks. IEEE/ACM Trans. Netw. 2008, 16, 1378–1391. [Google Scholar] [CrossRef]
- Cheng, C.F.; Tsai, K.T. Distributed Barrier Coverage in Wireless Visual Sensor Networks with β-QoM. IEEE Sens. J. 2011, 12, 1726–1735. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, Q.; Qi, H.; Chen, H.; Wang, Q. Cost-effective barrier coverage formation in heterogeneous wireless sensor networks. Ad Hoc Netw. 2017, 64, 65–79. [Google Scholar] [CrossRef]
- Tian, J.; Liang, X.; Wang, G. Deployment and reallocation in mobile survivability-heterogeneous wireless sensor networks for barrier coverage. Ad Hoc Netw. 2016, 36, 321–331. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Ben-Othman, J. HeteRBar: Construction of Heterogeneous Reinforced Barrier in Wireless Sensor Networks. IEEE Commun. Lett. 2017, 21, 1859–1862. [Google Scholar] [CrossRef]
- Karatas, M. Optimal deployment of heterogeneous sensor networks for a hybrid point and barrier coverage application. Comput. Netw. 2018, 132, 129–144. [Google Scholar] [CrossRef]
- Nguyen, T.G.; So-In, C. Distributed Deployment Algorithm for Barrier Coverage in Mobile Sensor Networks. IEEE Access 2018, 6, 21042–21052. [Google Scholar] [CrossRef]
- Chang, C.-Y.; Hung, L.-L.; Chen, Y.-C.; Li, M.-H. On-supporting energy balanced k-barrier coverage in wireless sensor networks. In Proceedings of the ICCAD ’09, Leipzig, Germany, 21–24 June 2009. [Google Scholar]
- Liu, L.; Zhang, X.; Ma, H. Exposure-Path Prevention in Directional Sensor Networks Using Sector Model Based Percolation. In Proceedings of the 2009 IEEE International Conference on Communications, Dresden, Germany, 14–18 June 2009. [Google Scholar]
- Tao, D.; Wu, T.Y. A survey on barrier coverage problem in directional sensor networks. IEEE Sens. J. 2014, 15, 876–885. [Google Scholar]
- Zhang, J.; Chen, J.; Sun, Y.; He, S.; Gong, X. Curve-Based Deployment for Barrier Coverage in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2014, 13, 724–735. [Google Scholar]
- Gong, X.; Zhang, J.; Cochran, D.; Xing, K. Barrier coverage in bistatic radar sensor networks: Cassini oval sensing and optimal placement. In Proceedings of the International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), Bangalore, India, 29 July–1 August 2013. [Google Scholar]
- Tang, L.; Gong, X.; Wu, J.; Zhang, J. Target Detection in Bistatic Radar Networks: Node Placement and Repeated Security Game. IEEE Trans. Wirel. Commun. 2013, 12, 1279–1289. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Xie, B.; Wang, D.; Agrawal, D. Intrusion Detection in Homogeneous and Heterogeneous Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2008, 7, 698–711. [Google Scholar] [CrossRef]
- Lin, C.-C.; Chen, Y.-C.; Chen, J.-L.; Deng, D.-J.; Wang, S.-B.; Jhong, S.-Y. Lifetime Enhancement of Dynamic Heterogeneous Wireless Sensor Networks with Energy-Harvesting Sensors. Mob. Netw. Appl. 2017, 38, 393–942. [Google Scholar] [CrossRef]
- Shih, K.-P.; Deng, D.-J.; Chang, R.-S.; Chen, H.-C. On connected target coverage for wireless heterogeneous sensor networks with multiple sensing units. Sensors 2009, 9, 5173–5200. [Google Scholar] [CrossRef] [PubMed]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity |
|---|---|
| BR transmitter i, BR receiver j and target | |
| line segment between transmitter and target X | |
| line segment between receiver and target X | |
| Distance between transmitter and target X | |
| Distance between receiver and target X | |
| Pair of bistatic radar sensors | |
| Signal to noise ratio of target X | |
| SNR threshold of BR barrier | |
| Detectability of X | |
| Detectability threshold of BR barrier | |
| q kinds of BR transmitters and corresponding number of transmitters | |
| All transmitters | |
| All receivers | |
| Line barrier length | |
| The vulnerability of barrier | |
| Left and right endpoint (node) of barrier | |
| Placement sequence of BR sensors | |
| placement spacing i | |
| Placement spacing interval i of BR transmitter j | |
| D | Maximum placement spacing sequence of internal coverage area |
| E | Maximum placement spacing sequence of external coverage area |
| Dtectability threshold of BR barrier |
| Symbol | Quantity |
|---|---|
| L | (100,200),(100,1000) |
| K | |
| S1, S2, S3 | Transmitter placement order |
| e | The absolute value of the difference of S1, S2, and S3 barrier length |
| T1 ~ T6 | Transmitter type |
| CT | |
| CR | 1 |
| SNR* | The optimal SNR for line barriers |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Zhao, C.; Cheng, Z.; Gu, T. Approximate Optimal Deployment of Barrier Coverage on Heterogeneous Bistatic Radar Sensors. Sensors 2019, 19, 2403. https://doi.org/10.3390/s19102403
Xu X, Zhao C, Cheng Z, Gu T. Approximate Optimal Deployment of Barrier Coverage on Heterogeneous Bistatic Radar Sensors. Sensors. 2019; 19(10):2403. https://doi.org/10.3390/s19102403
Chicago/Turabian StyleXu, Xianghua, Chengwei Zhao, Zongmao Cheng, and Tao Gu. 2019. "Approximate Optimal Deployment of Barrier Coverage on Heterogeneous Bistatic Radar Sensors" Sensors 19, no. 10: 2403. https://doi.org/10.3390/s19102403