1. Intrduction
Active magnetic bearings (AMBs), which utilize magnetic levitation technology, are a type of bearing designed to support a load at a neutral position without mechanical contact [
1,
2]. AMBs possess several advantages, including an absence of friction, no need for lubrication, and a long-term high speed running ability, so they have the capability of active vibration control, allowing for the reduction of rotor vibrations [
3]. Therefore, AMBs are widely applied in high-speed rotating machinery and flexible rotordynamic systems [
4,
5]. However, AMBs are open-loop unstable systems, so the rotor position must be accurately measured in real time to achieve closed-loop feedback control. Inductive transducers are widely applied to the AMB system with their characteristics of high precision and non-contact measurement [
6]. Inductive transducers measure the moving target, which change the transducer inductance as a function of the target position. Therefore, the changing reluctance allows the transducer to be used as a length resolution [
7].
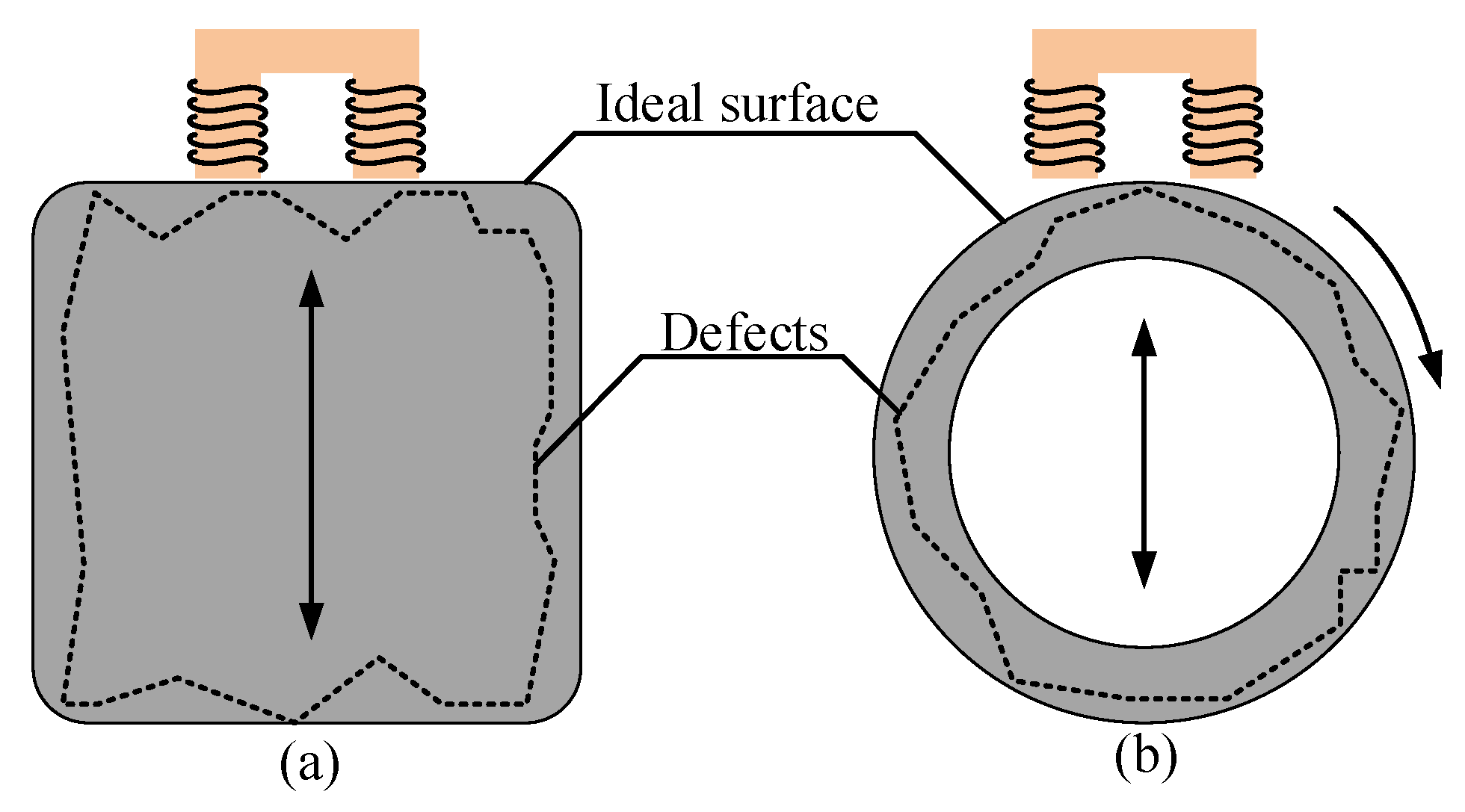
In the measurement, if the target moves only along the measuring direction, as shown in
Figure 1a, the measuring accuracy of inductive transducers will not be affected, because the measuring point remains unchanged. However, in the AMB system, the rotor both moves along the measuring direction and rotates at a high speed, as shown in
Figure 1b. As for variable-gap inductive transducers, the measuring signal (the magnetic field generated by transducer coils) will pass through the surface and interior of the rotor. Therefore, in the AMB system, the measuring point of inductive transducers changes constantly and the measuring accuracy will be affected by the rotor defects.
There are many rotor defects that affect the measuring accuracy of inductive transducers, including the material inhomogeneity, impurities, and mechanical errors [
8,
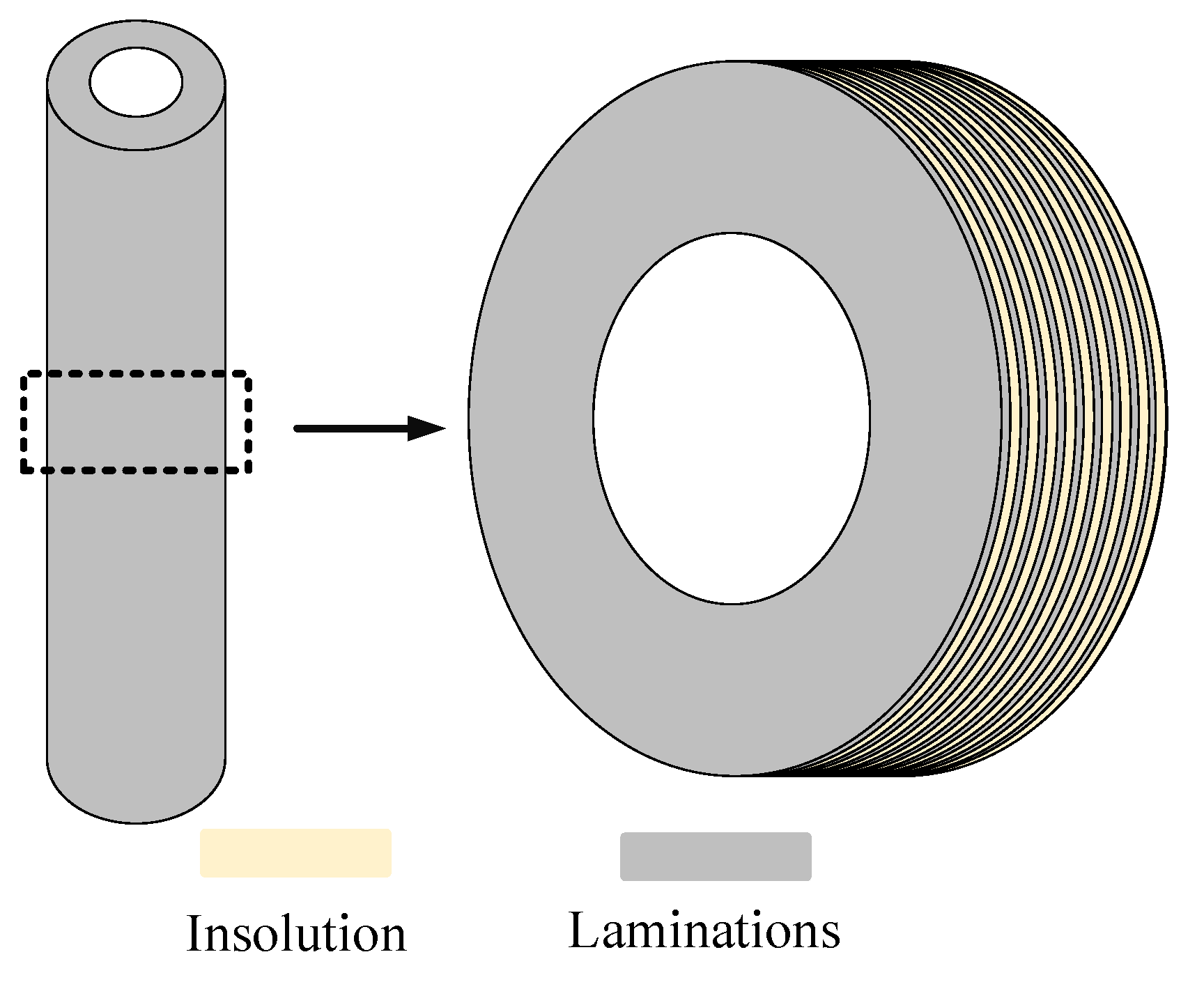
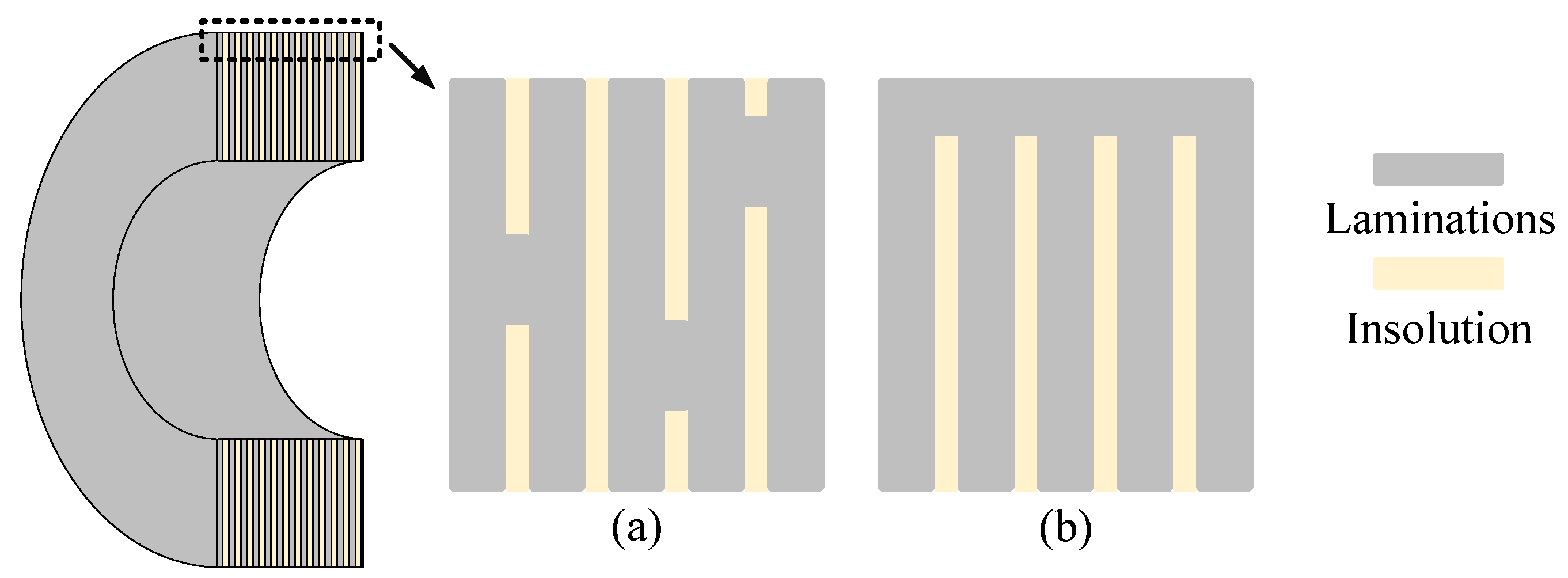
9]. In the AMB system, the rotor is laminated with non-oriented silicon steel sheets, which are fixed by insulation materials, to reduce the eddy current, as shown in
Figure 2. Although silicon steel sheets are non-oriented, the material permeability (in this paper, the permeability refers to the magnetic property in electromagnetism) still possesses difference at different directions. In addition, the laminations may have an insulation defect when assembling the rotor, and the lamination insulation on the rotor surface will be destroyed while lathing the rotor. All of this leads to the anisotropic conductivity of the rotor surface.
When the rotor rotates at a high speed, rotor non-mechanical errors, including the anisotropic internal permeability and anisotropic surface conductivity, will lead to physical properties of the measuring point changing continuously and then affect the measuring signal of inductive transducers. Therefore, rotor non-mechanical errors can affect the transducer measuring accuracy and lead to errors in displacement signals for AMBs. Inductive transducers have been studied in the aspects of structural designs [
7,
10], external environmental effects [
11,
12], and material properties of the target [
8,
9]. However, as for the variable-gap inductive transducers applied to AMBs, the influence of rotor non-mechanical errors on transducer measuring accuracy has not been studied in detail.
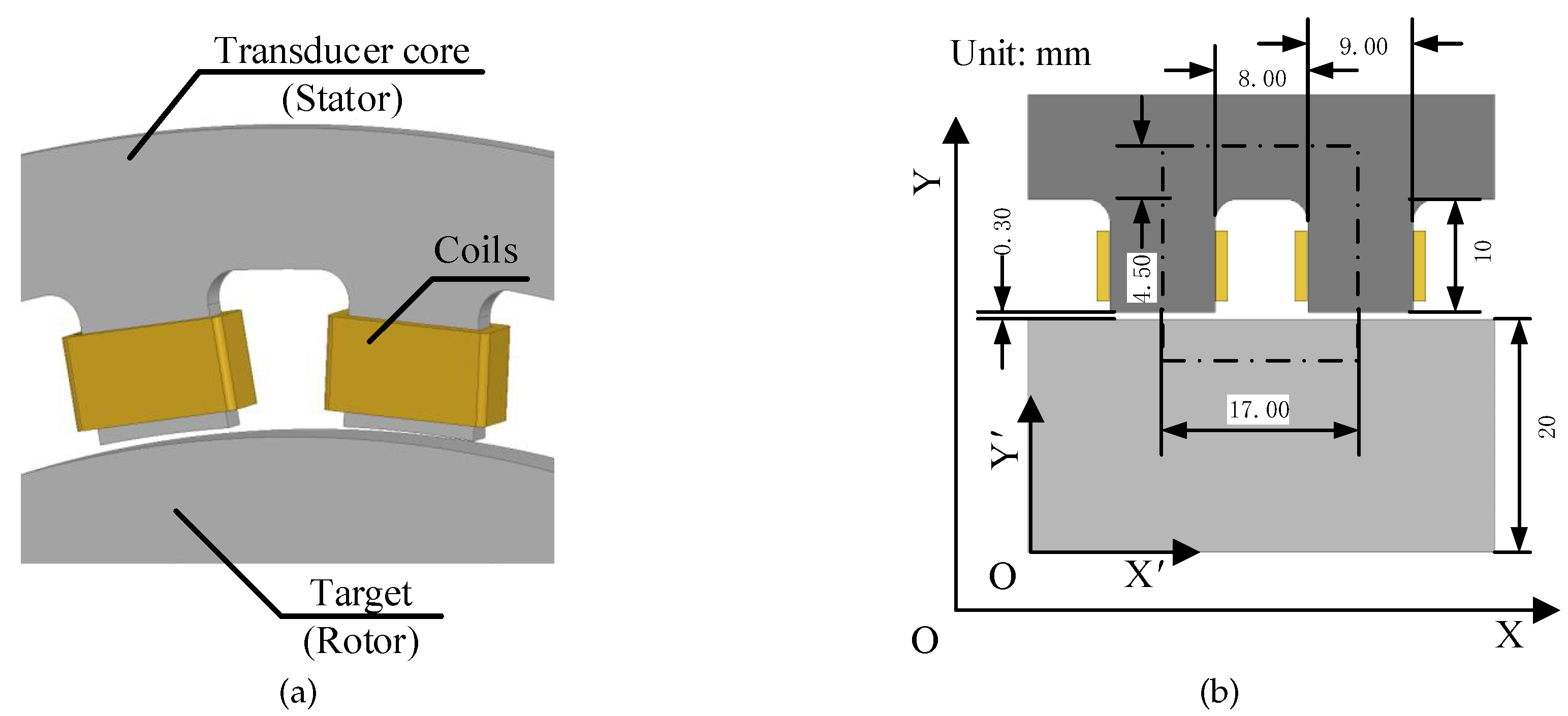
Rotor non-mechanical errors include the permeability, conductivity, piezoelectricity, etc. In this paper, the anisotropic internal permeability and anisotropic surface conductivity of the rotor and their influence on transducers and AMB controller are explored in depth. The transducer studied in this paper is a double-pole variable-gap inductive transducer, as shown in
Figure 3a. In
Section 2, the influence of anisotropic internal permeability on the transducer is studied with theoretical analysis and finite element analysis (FEA).
Section 3 focuses on analyzing the anisotropic surface conductivity and its influence on the transducer. At last, the experiments are carried out to validate the influence of rotor non-mechanical errors on the transducer measurement accuracy and AMB controller.
4. Transducer-Rotor Experiment
According to the theoretical analysis and FEA in
Section 2 and
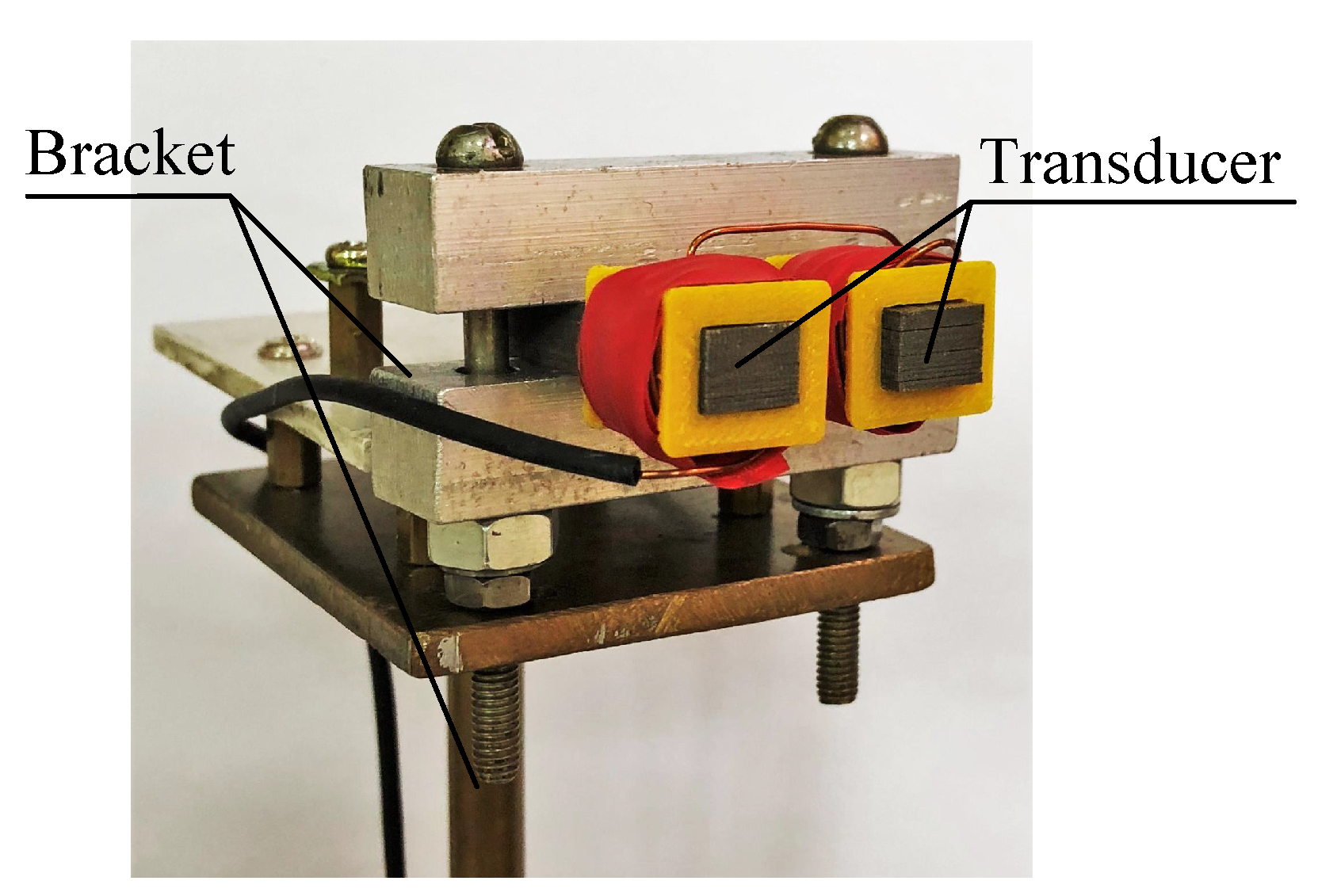
Section 3, the rotor non-mechanical errors, the anisotropic internal permeability, and the surface conductivity should influence transducer measuring accuracy. To further verify the influence, a transducer-rotor experiment was carried out. In the experiment, the double-pole variable-gap inductive transducer was studied, as shown in
Figure 9.
4.1. Experimental Settings
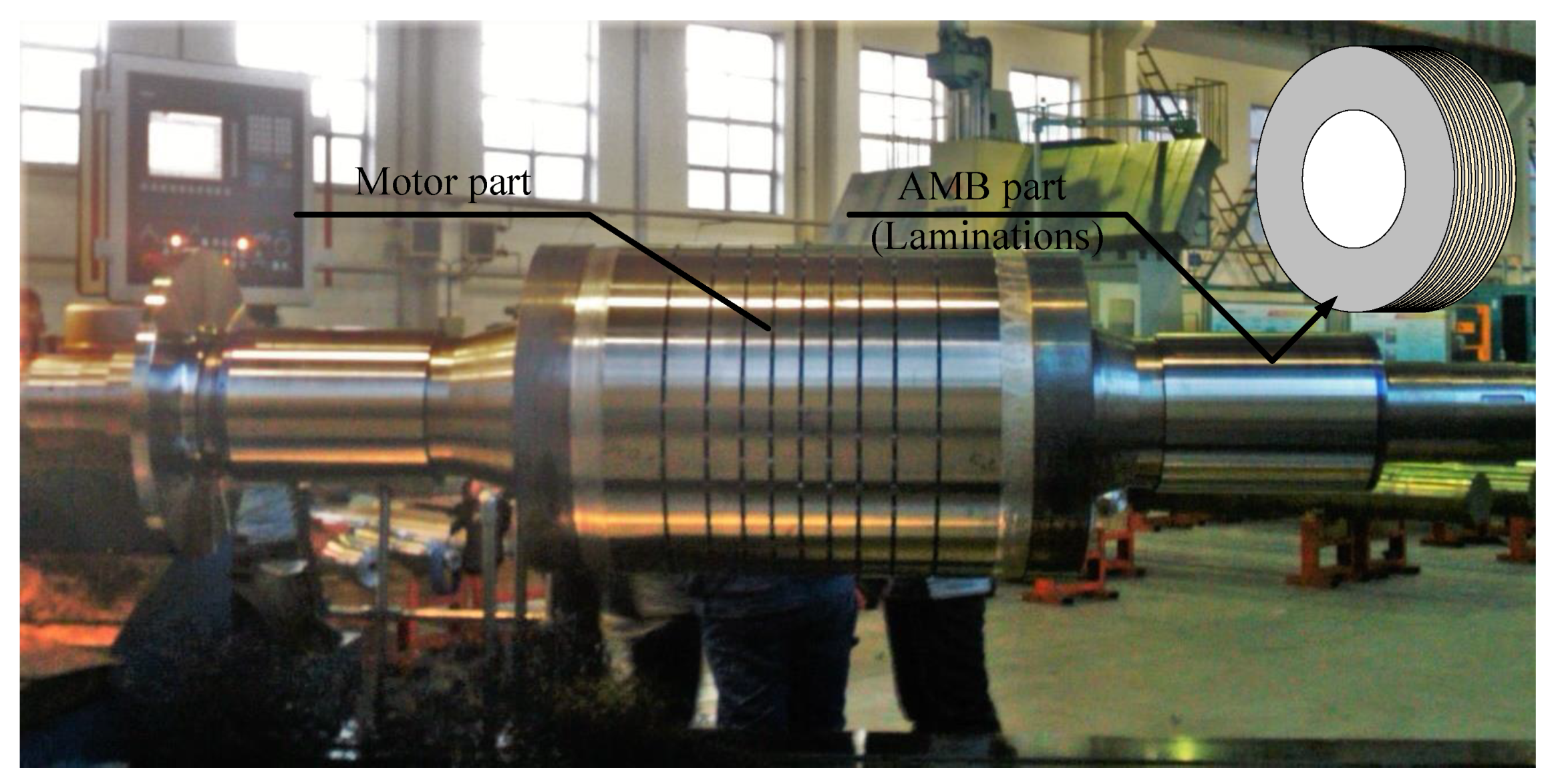
In order to eliminate measurement errors caused by mechanical defects and the eccentric rotation of the rotor, the experiment was carried out directly on the lathe after lathing the rotor, as shown in
Figure 10. After the rotor was lathed, the mechanical error was 0.01∼0.02 mm, which was measured by high-precision dial gauges before the experiment.
The rotor remained on the lathe after lathing, and the transducer probe was fixed on the bracket. The radial distance between the probe and the rotor (AMB part) was (measured by micrometer), and the probe was aligned with the center of laminations. The position was recorded as a zero point (recorded as ).
The probe was moved to the rotor by (record as ) and away from the rotor by (record as ), and the transducer output was recorded. The transducer sensitivity was calculated based on the data.
The probe was moved back to , and the rotor was rotated to . The transducer output was recorded, and the relationship between the transducer output (displacement) and the rotor rotation angle was obtained.
4.2. Original Results without Heating Treatment
According to the experimental data in
Table 5, the transducer sensitivity is
.
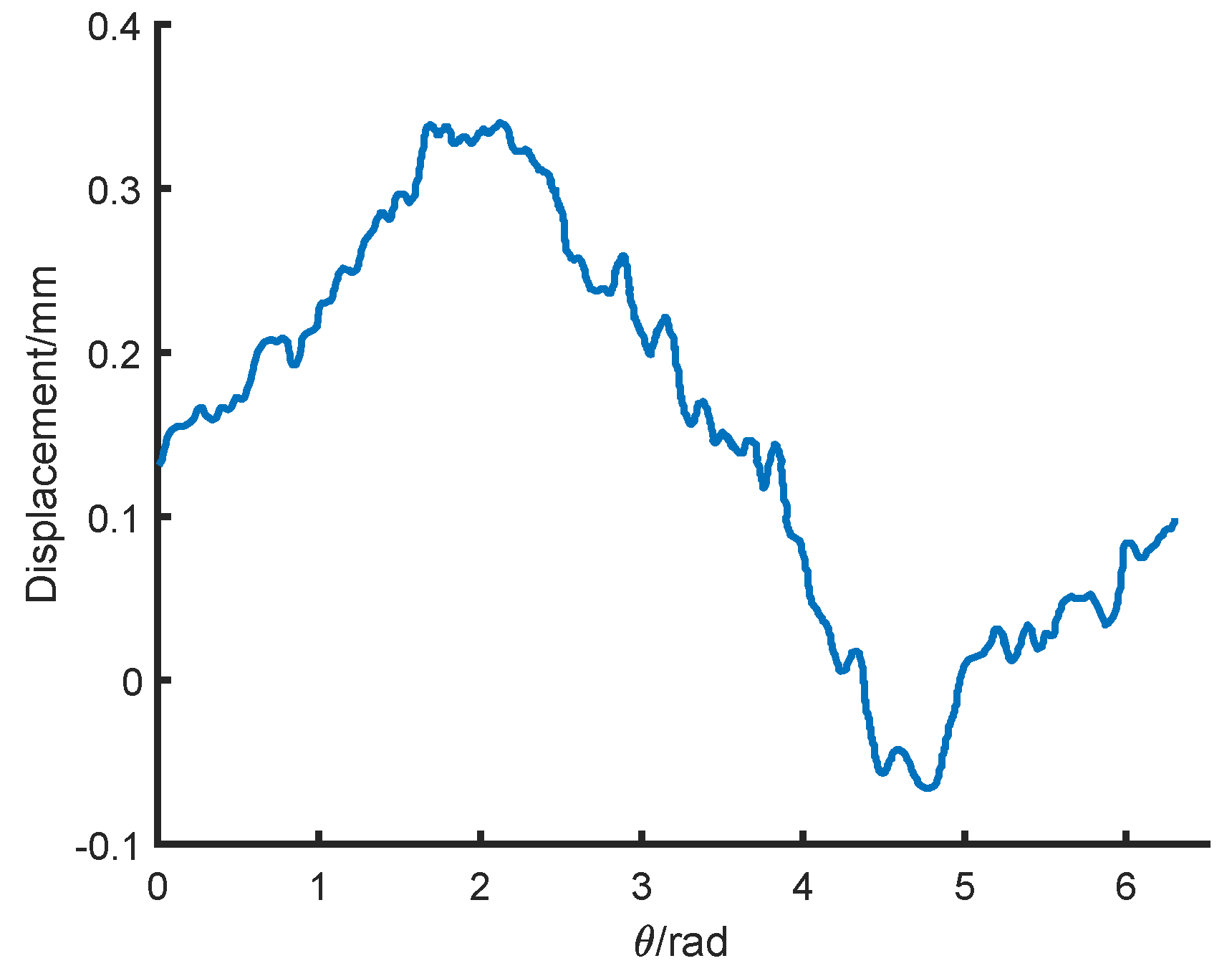
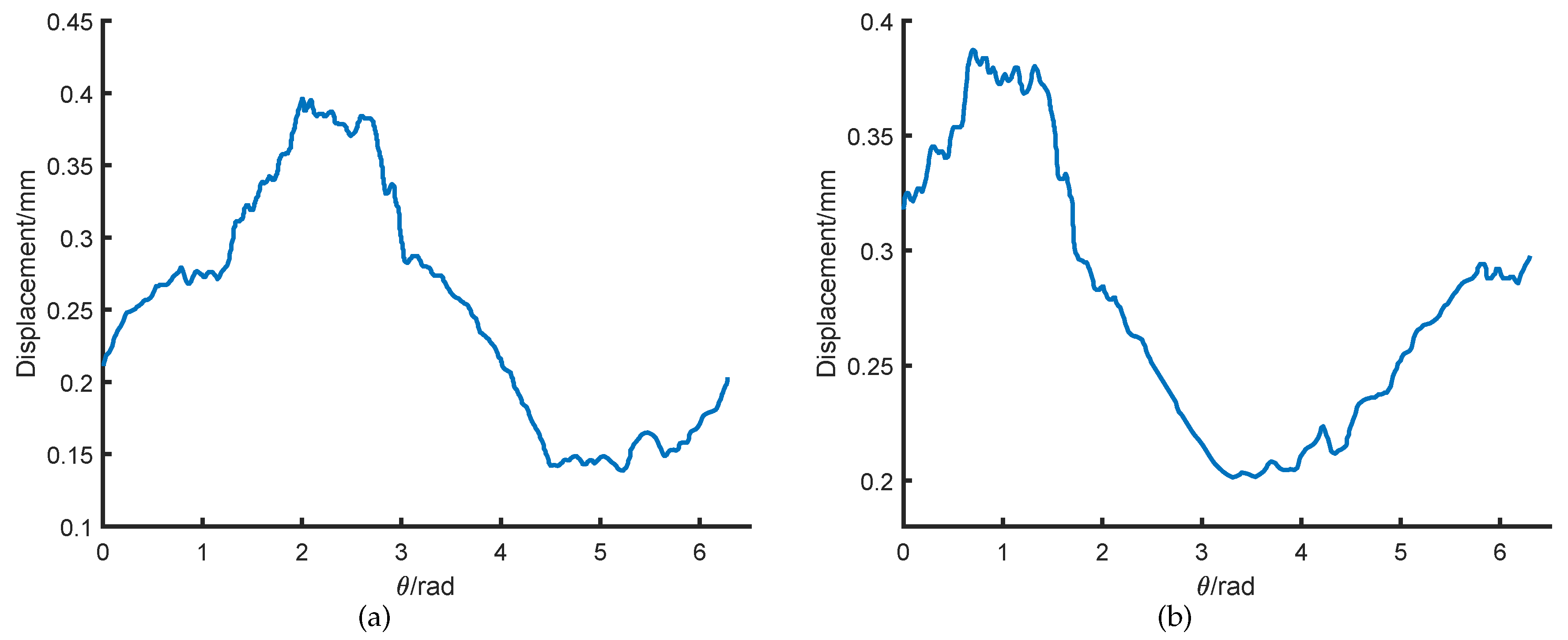
Figure 11 shows the relationship between the displacement and the rotor rotation angle. The peak-to-peak value of the output is
. Since the mechanical error of the rotor is only 0.01∼0.02 mm, the transducer has a large measurement error of about
. Therefore, the rotor non-mechanical errors lead to a significant influence on transducer measurement accuracy.
4.3. Heating Treatment Experiment
To further prove that the measurement error is caused by rotor non-mechanical errors, the rotor surface was heated by acetylene.
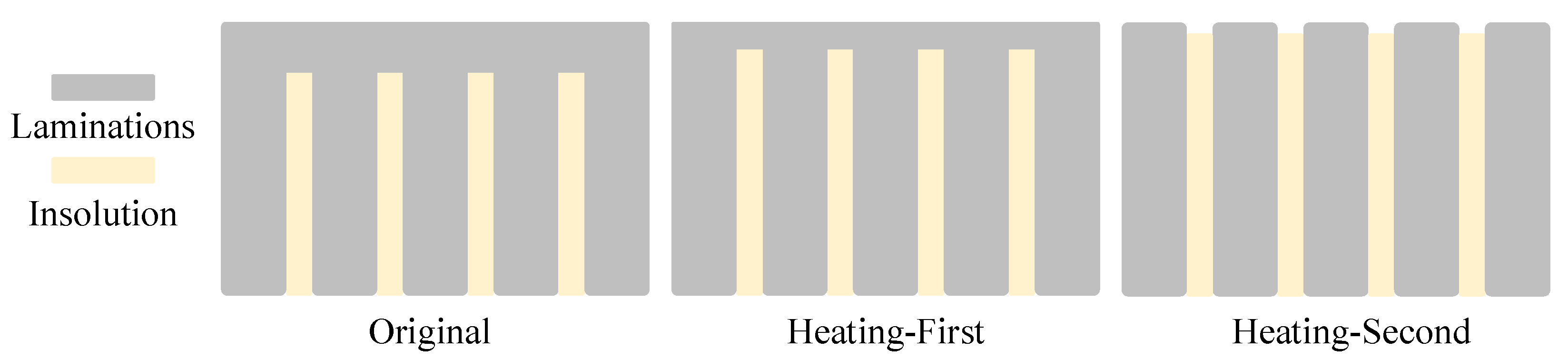
Heating the rotor mainly has two functions. The insulation defect caused by rotor lathing can be solved by high-temperature heating on the rotor surface. When the temperature on the rotor surface is high, the contact edge of laminations can be reshaped and separated and the insulation will be improved, as shown in
Figure 12. After the silicon steel sheets are heated, the internal grain distribution tends to be more disordered, which results in lower anisotropic internal permeability of the rotor.
Table 6 shows the transducer sensitivity after the rotor is heated. Transducer sensitivity after the first and the second surface heating treatment is
and
. It can be seen from the experimental data that the heating treatment has little influence on transducer sensitivity.
Figure 13a,b show the relationship between the displacement and the rotor rotation angle after the first and second heating treatment. The peak-to-peak value is reduced to
and
, respectively.
It can be seen from the experimental results that, in two-pole transducer measurement, the peak-to-peak values are significantly reduced after heating treatment. Heating treatment reduces the anisotropy of rotor surface conductivity and internal permeability and reduces the influence of rotor non-mechanical errors on the inductive transducer.
The experiment proves that rotor non-mechanical errors have a significant influence on transducer measuring accuracy, and the maximum error can be reduced by heating the rotor from to . However, in the experiment, heating the rotor surface did not eliminate transducer measurement errors completely. There are several reasons for this. Firstly, the assembling accuracy of laminations in the experiment is poor and leads to poor insulation inside the rotor, which needs to be improved in further experiments. Secondly, due to heating methods, temperature, heating time, etc., heating treatment cannot completely eliminate insulation defects on the rotor surface. Thirdly, since only the rotor surface is heated by acetylene, the internal temperature of the rotor is low, so the permeability anisotropy cannot be entirely reduced. To further reduce the rotor non-mechanical errors and its influence on the transducer, the lamination insulation must be improved significantly when assembling the rotor, and the heating method, such as the temperature control, should also be improved.
5. Solution for Rotor Non-Mechanical Errors
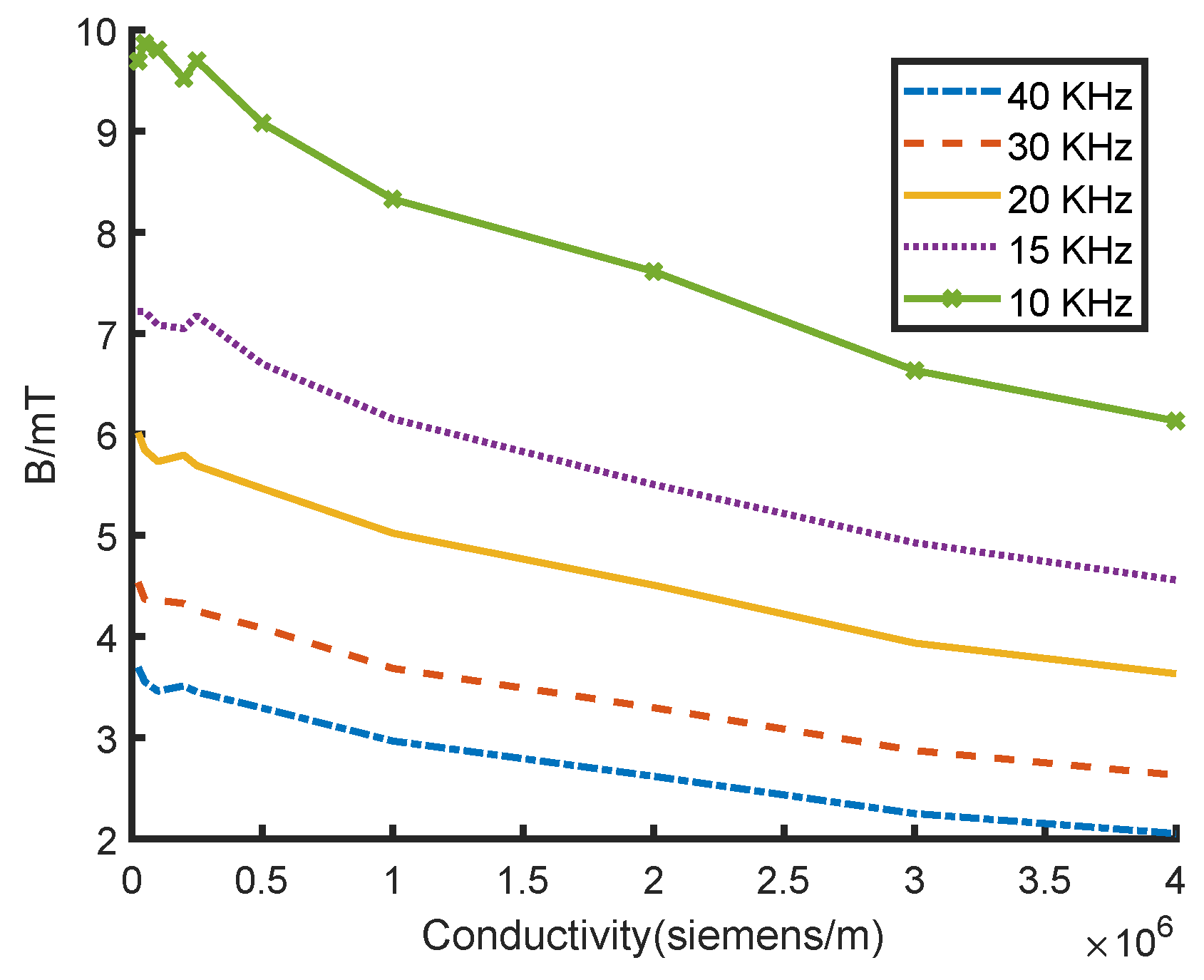
5.1. Frequency Influence on Transducer Measurement Accuracy
According to the theoretical analysis and FEA results, the influence of the anisotropic surface conductivity on the transducer measurement accuracy can be reduced by reducing the excitation frequency. Based on the transducer-rotor platform, the excitation frequency experiment was designed to determine solutions for rotor non-mechanical errors. The experimental device is the same as that described in
Section 4.
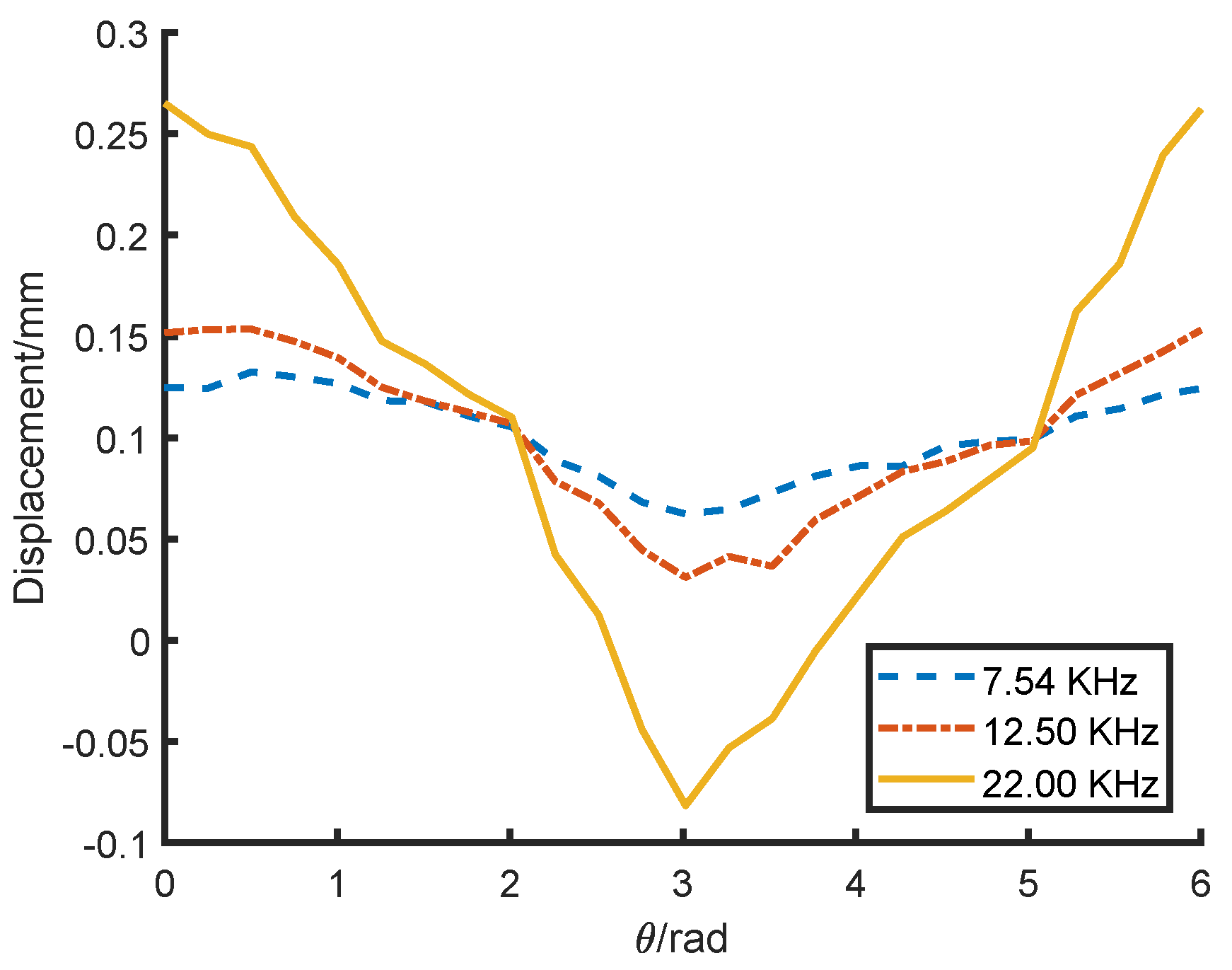
The output of the transducer was measured at different excitation frequencies of
,
and
. The results are shown in
Figure 14. When the current frequency was
, the transducer measurement error was about
. When the frequency dropped to
, the error clearly decreased to
. When the frequency further decreased to
, the error was
. The results show that the transducer measurement error can be reduced significantly by decreasing the transducer excitation frequency.
It should be noted, however, that, although reducing the transducer excitation frequency can reduce the measurement error, it does not eliminate the error. In addition, excessively decreasing the excitation frequency will also reduce the transducer resolution. Therefore, frequency reduction is an effective but not an ideal method to reduce the measurement error caused by rotor non-mechanical errors.
5.2. Improvement in the AMB Controller
In AMB-rotor systems, the transducer measurement error will be sent to the AMB controller, leading to error control in the rotor. Therefore, the rotor non-mechanical errors will eventually affect the dynamic performance of AMB-rotor systems. The AMB-rotor experiment was carried out to study the influence of frequency reduction on the AMB controller.
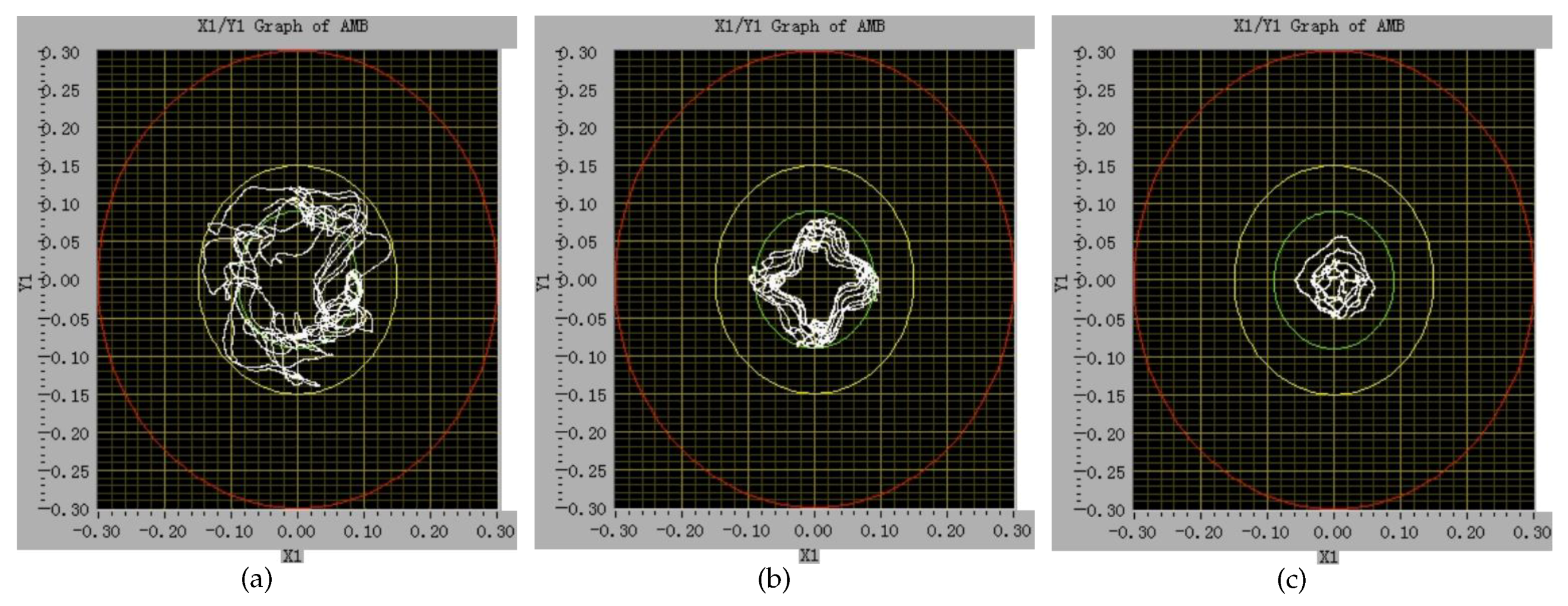
Figure 15 shows the axis orbit of the rotor at different transducer excitation frequencies of
,
, and
when the rotor speed is
. The red circle is the boundary of auxiliary bearings. It can be seen that at the same rotor speed, the rotor vibration drops significantly as the transducer excitation frequency decreases.
As shown in
Figure 15a, when the transducer excitation frequency is
, the rotor vibrates severely at the speed of
, and the rotor cannot continue to speed up.
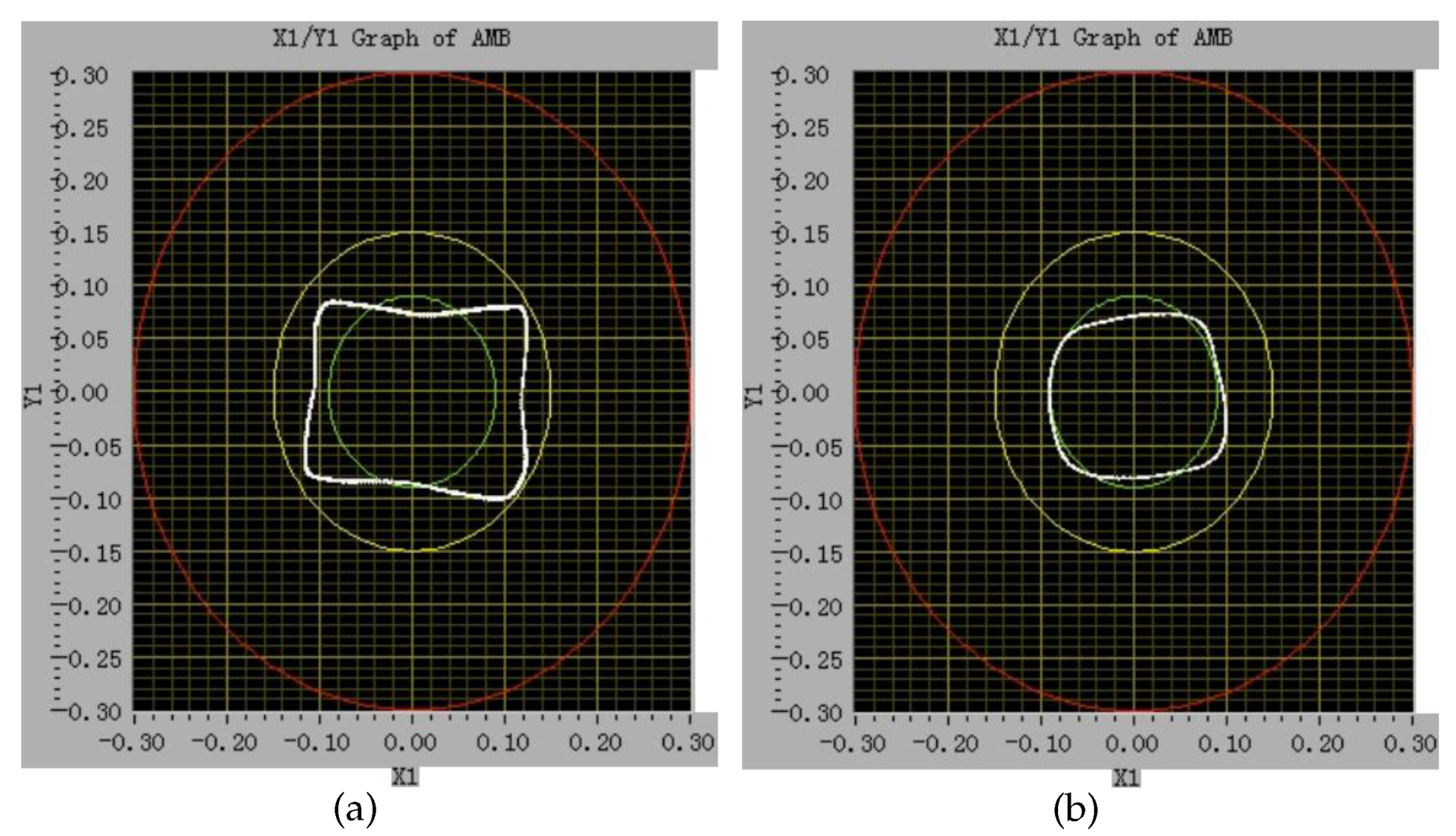
After reducing the transducer excitation frequency to
, the rotor still has a large vibration, but the vibration is significantly less than that at
. The rotor can speed up to
, as shown in
Figure 16a.
When the transducer excitation frequency is
, the rotor vibration is significantly reduced. The rotor speed can easily rise to
and has a smaller axis orbit, as shown in
Figure 16b.
The experiment further proves that the reduction in transducer excitation frequency can reduce measurement error caused by rotor non-mechanical errors and improve the performance of the AMB controller. However, frequency reduction is an effective, albeit not the only, way to solve rotor non-mechanical errors. Improving the lathing and assembling methods and selecting suitable material for the rotor are also important to eliminate the rotor non-mechanical errors at the source.
6. Conclusions
In this paper, the influence of rotor non-mechanical errors on the variable-gap inductive transducer is analyzed. The transducer-rotor model is established, based on which the influence of anisotropic internal permeability and anisotropic surface conductivity on the transducer measuring accuracy are analyzed and calculated.
Through theoretical calculation and FEA, the influence of anisotropic internal permeability on the transducer measuring accuracy is analyzed.
The measurement error is in theoretical analysis and in FEA, which means that the anisotropic internal permeability does have an influence on the transducer measuring accuracy.
The result in
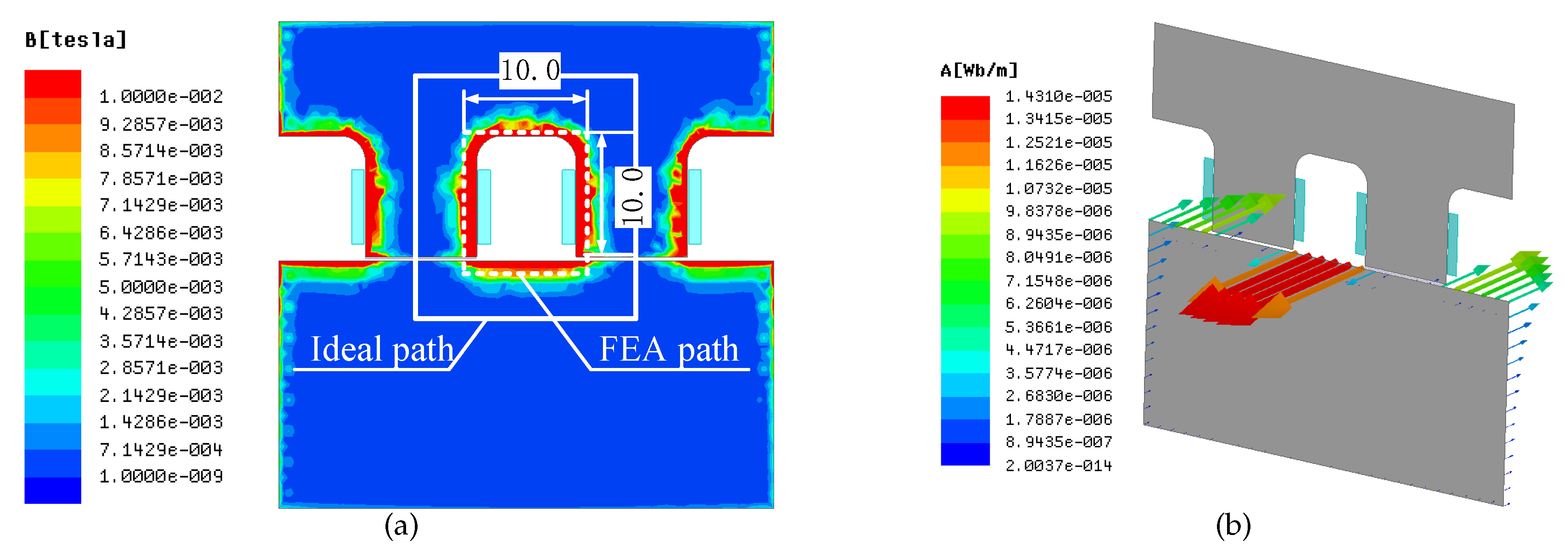
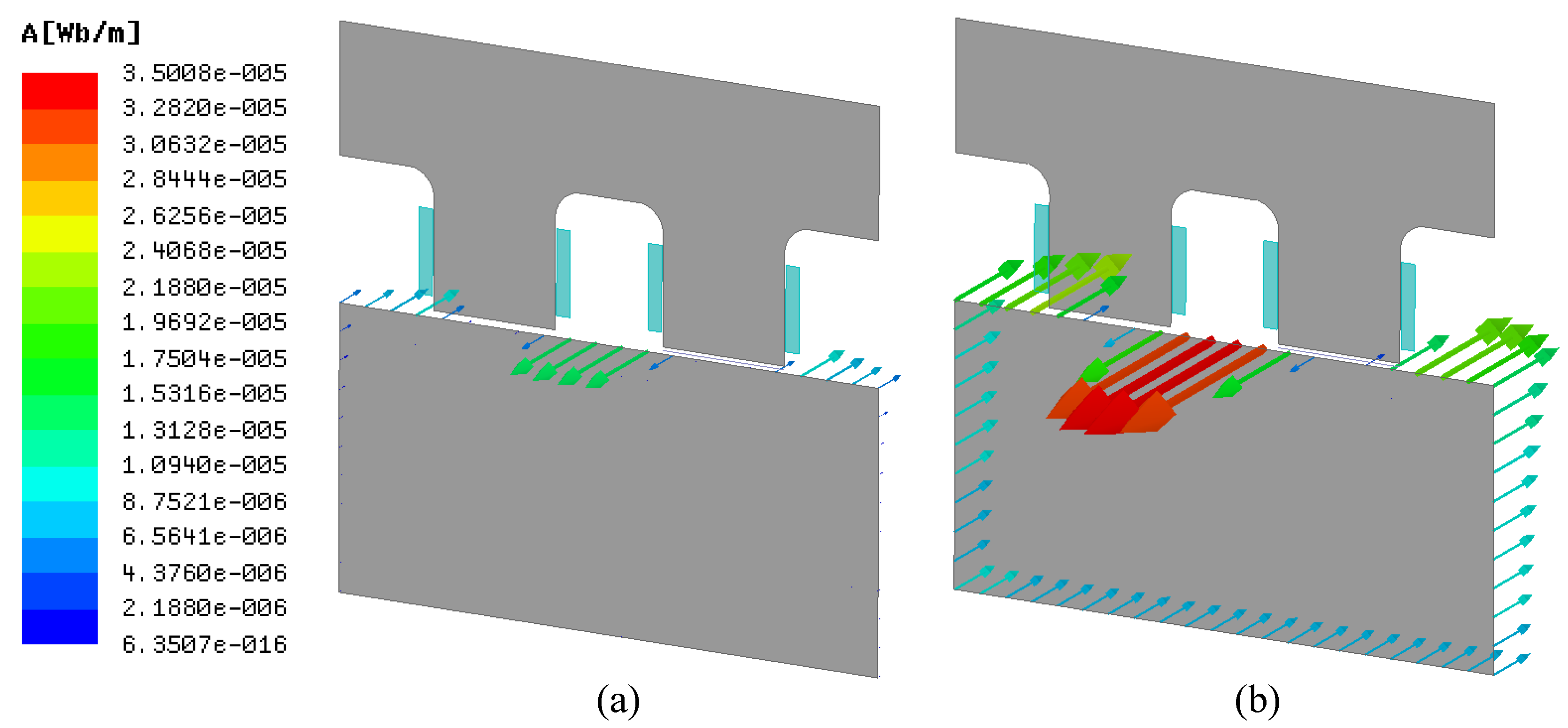
Section 3 proves that the anisotropic surface conductivity leads to different eddy currents around the rotor, influences the equivalent reluctance of the magnetic circuit, and then affects the transducer measuring accuracy.
The transducer-rotor experiment proves that rotor non-mechanical errors have a significant influence on transducer measuring accuracy, and the maximum error can be reduced by heating the rotor from to in a one-probe transducer.
The transducer measurement error caused by rotor non-mechanical errors is reduced significantly by decreasing the transducer excitation frequency. However, the error can only be reduced but not eliminated.
Different rotors will have different materials and assembly methods. However, as long as the rotor is assembled by laminations, there will be insulation defects, inevitably leading to anisotropic surface conductivity. In addition, no matter what the rotor material is, there will always be anisotropic internal permeability caused by rolling treatment. Therefore, the study in this paper provides a new direction for transducers to improve the measuring accuracy, especially for transducers working with a high-frequency magnetic field.
However, this study only analyzes the influence of rotor non-mechanical errors from qualitative aspects. Further research is needed to separate rotor non-mechanical errors, the anisotropic internal permeability, and surface conductivity into different experiments so that they can be studied separately. More precise experiments are needed to measure the real material permeability and conductivity, so that theoretical analysis can be perfected.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}