Mutual Capacitive Sensing Touch Screen Controller for Ultrathin Display with Extended Signal Passband Using Negative Capacitance

 ,
,
Abstract
:1. Introduction
2. Circuit Analysis of TSP Sensor and Proposed NC Circuit
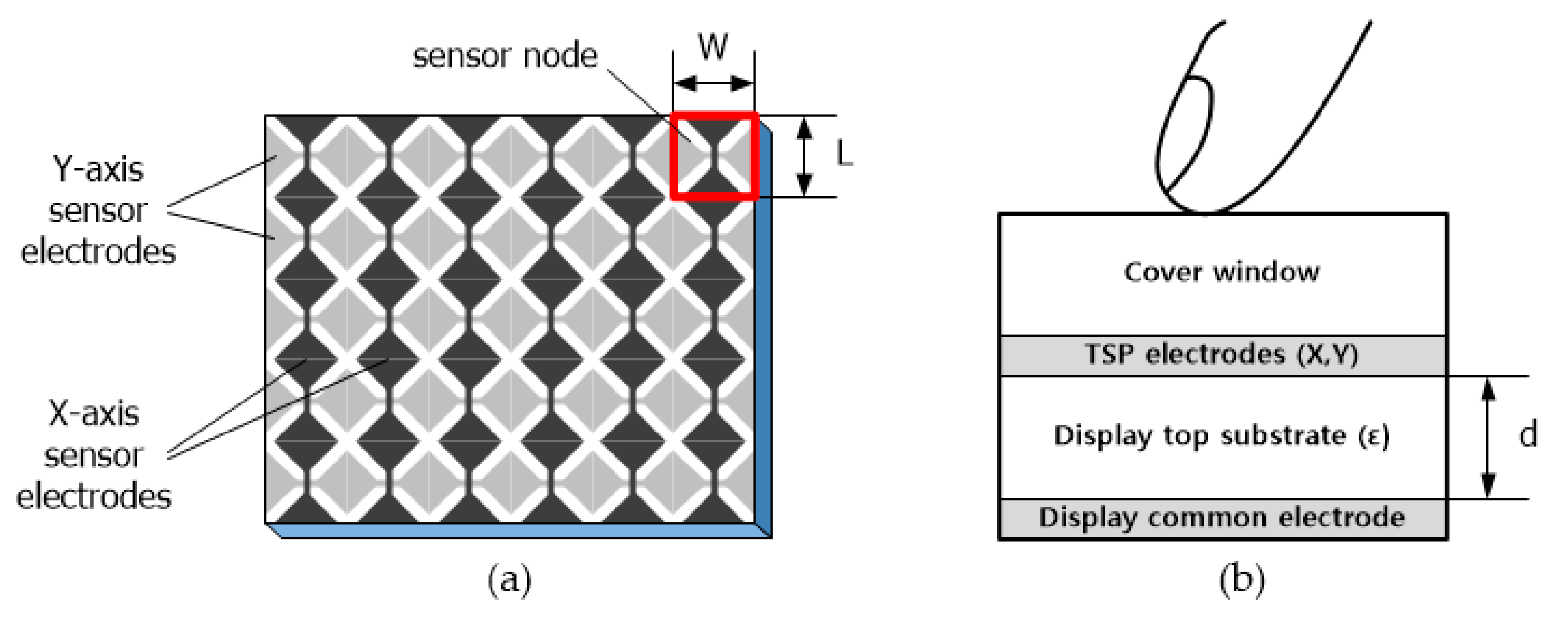
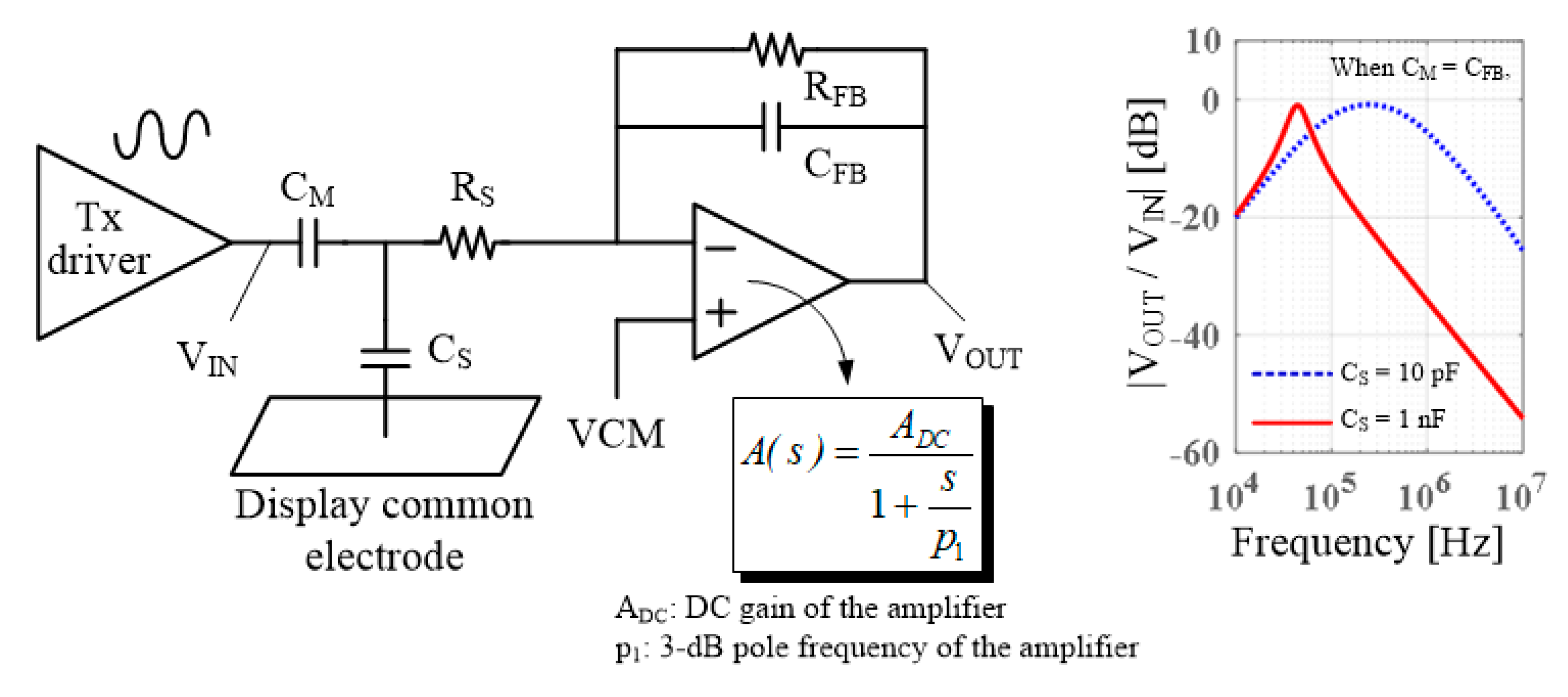
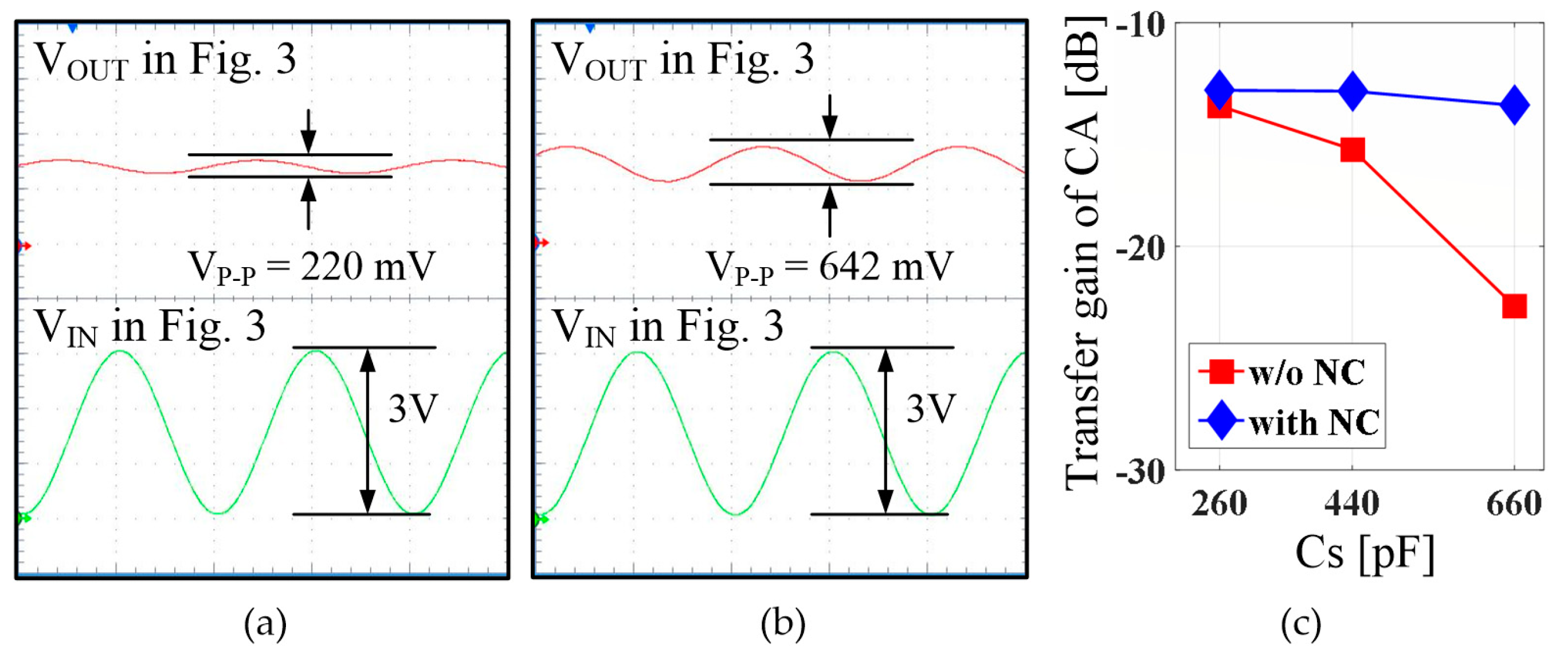
2.1. Passband Lowering Phenomenon by Large Display Coupling Capacitance
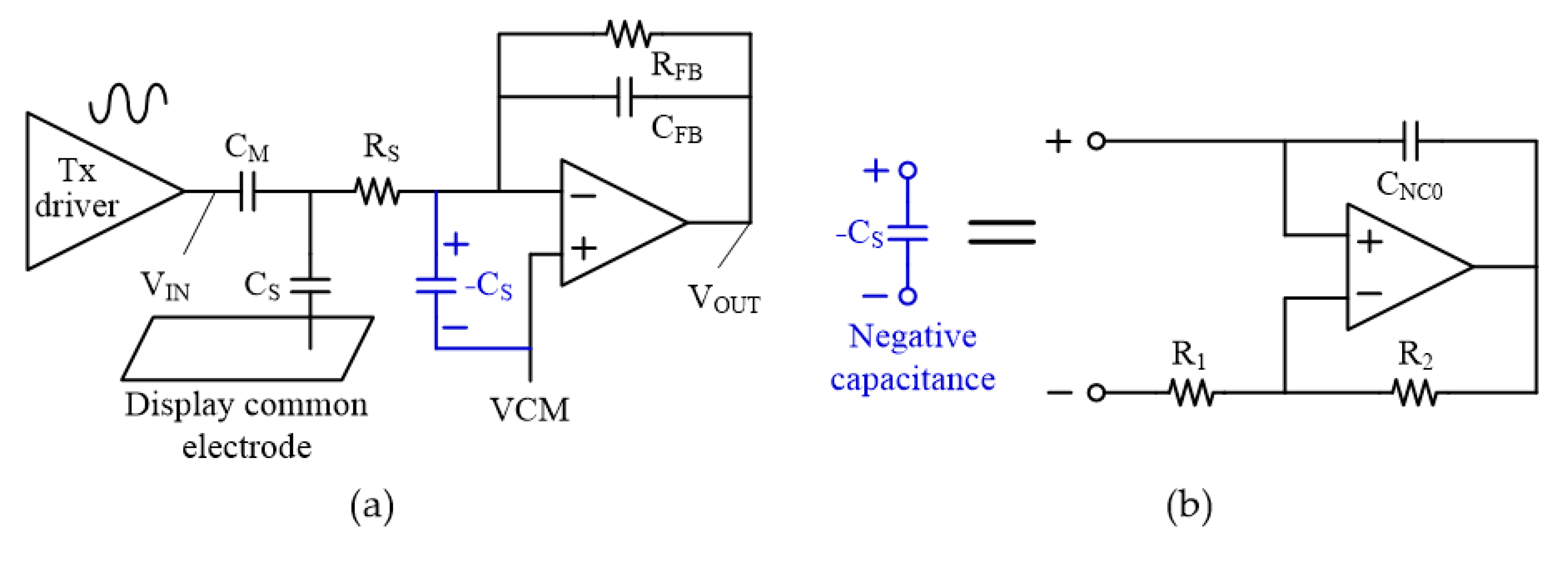
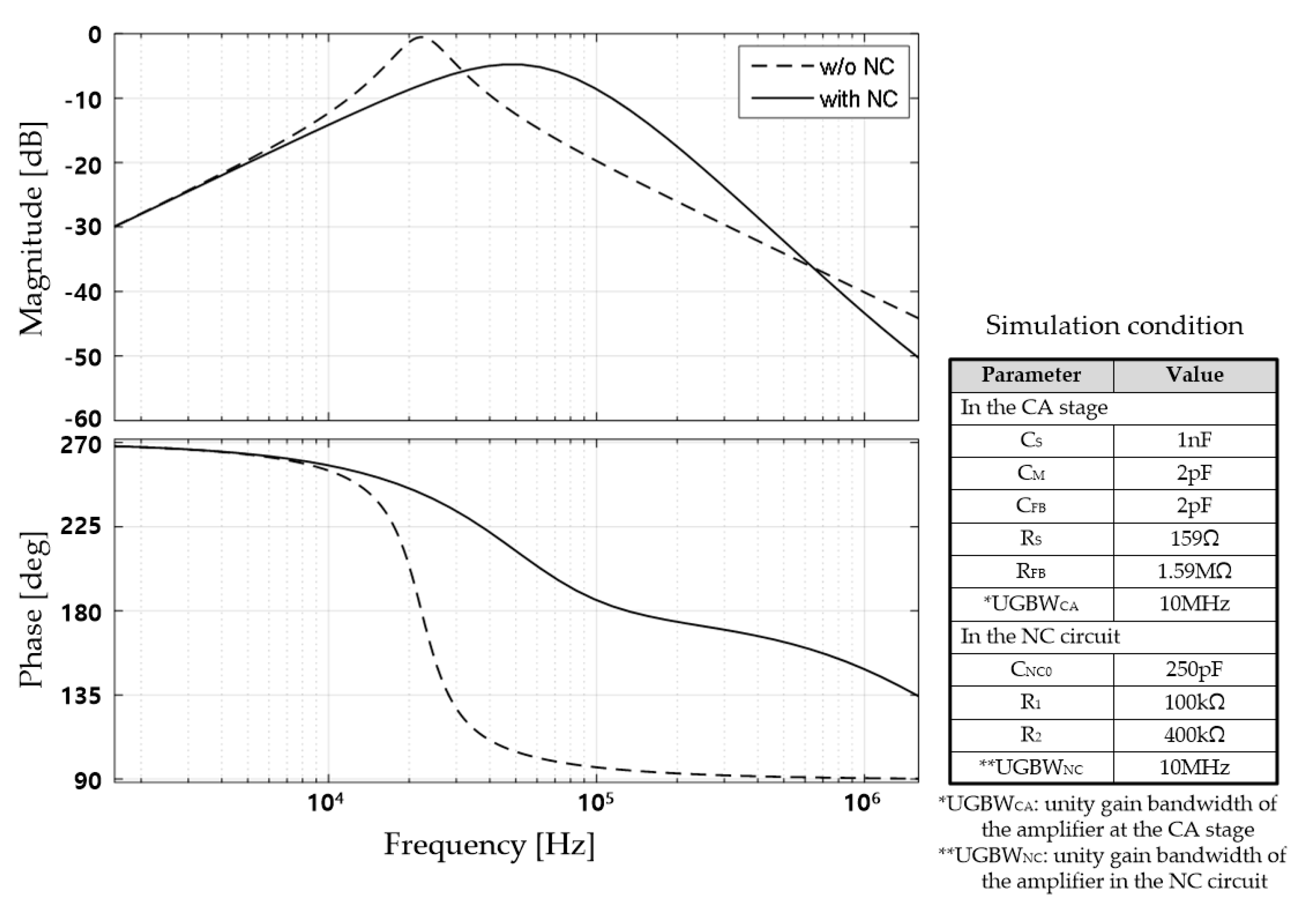
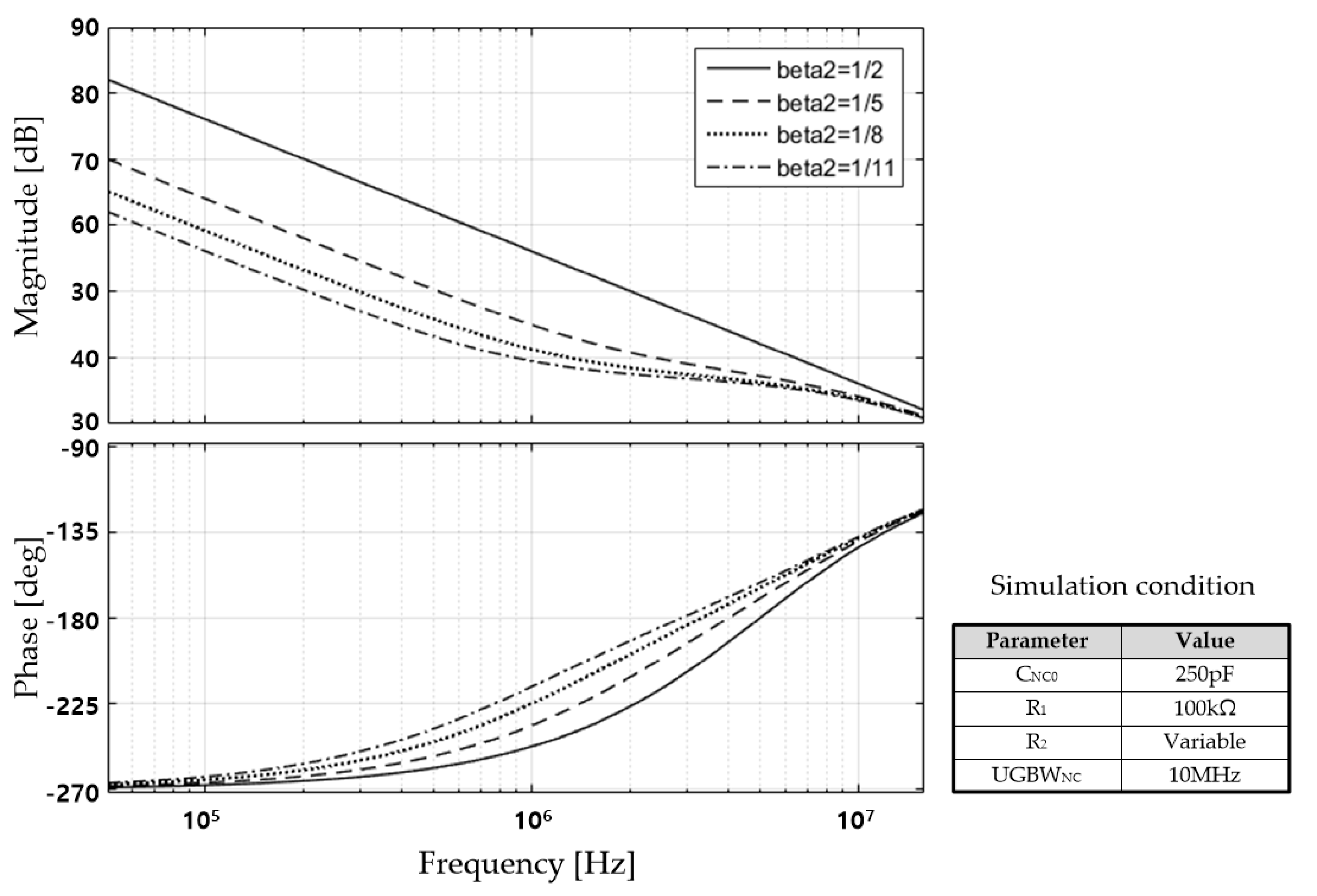
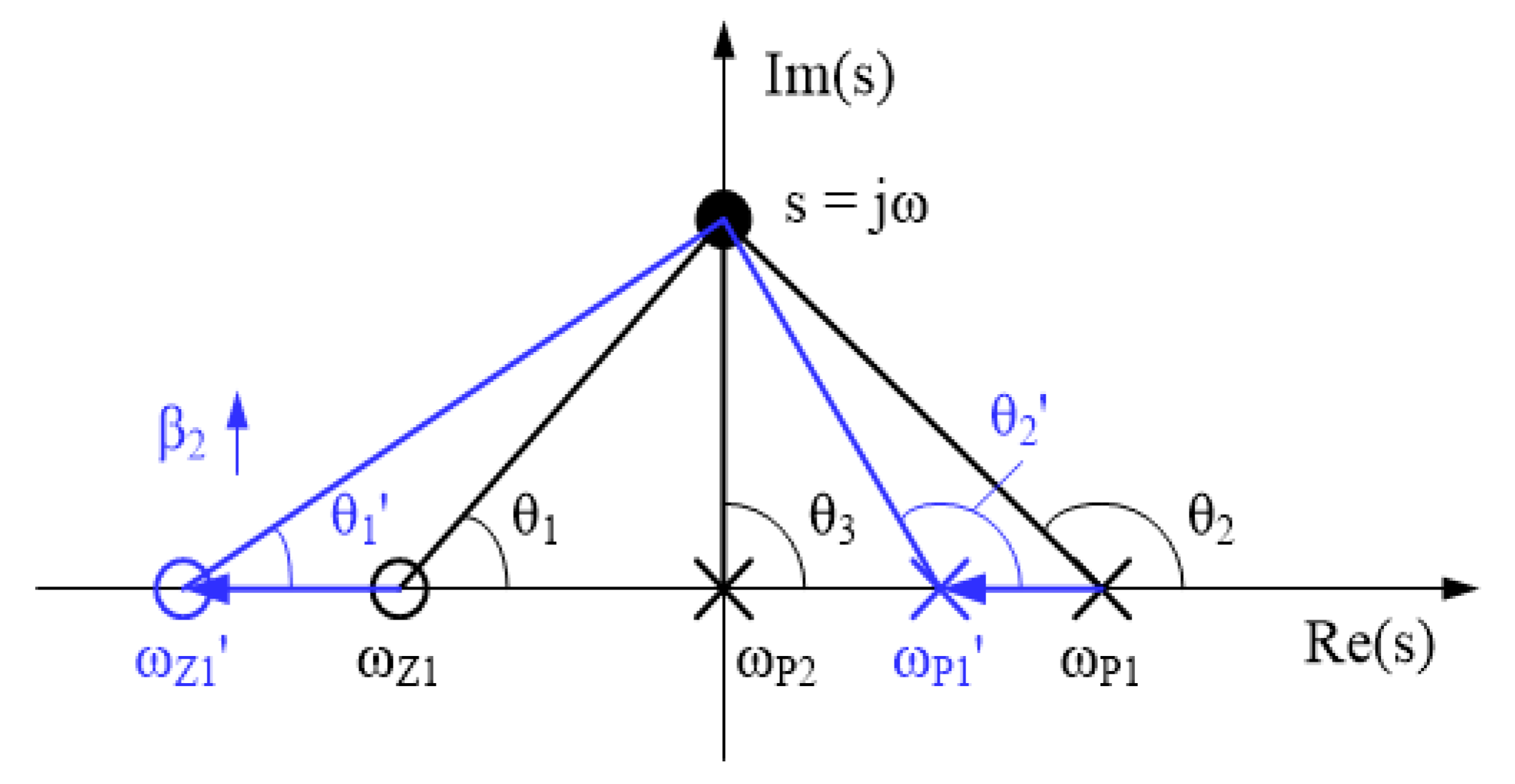
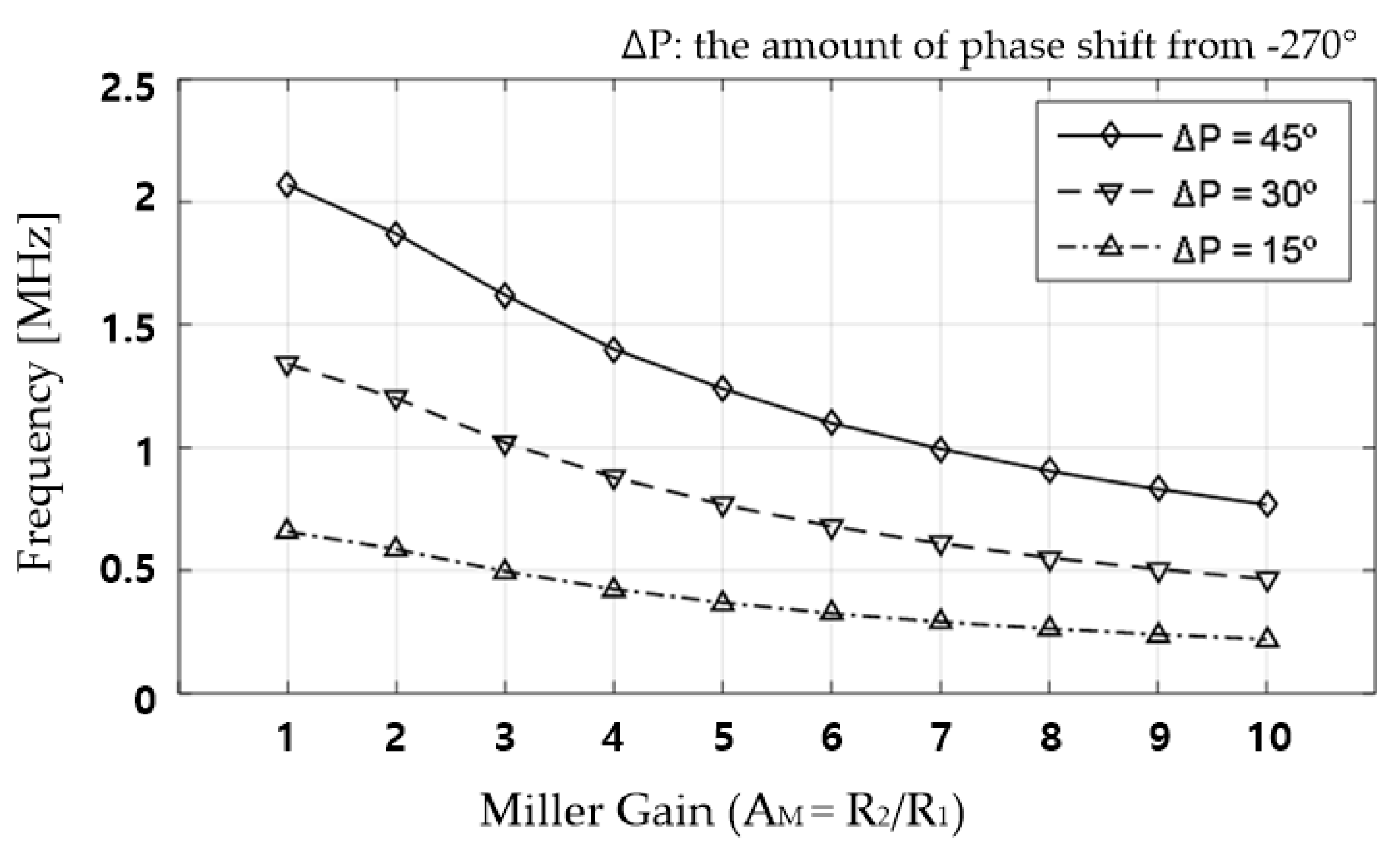
2.2. Design of NC
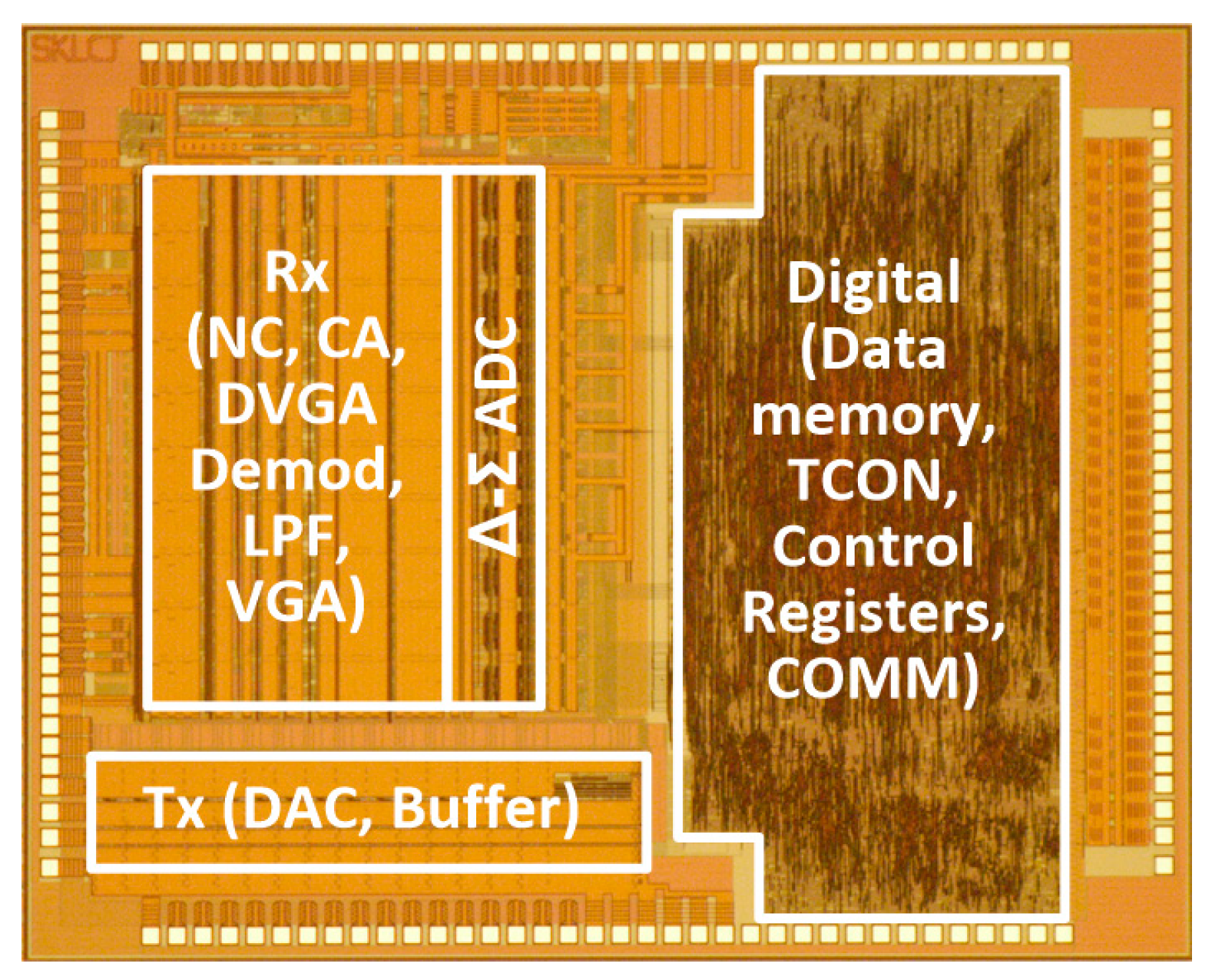
3. Full Chip Implementation
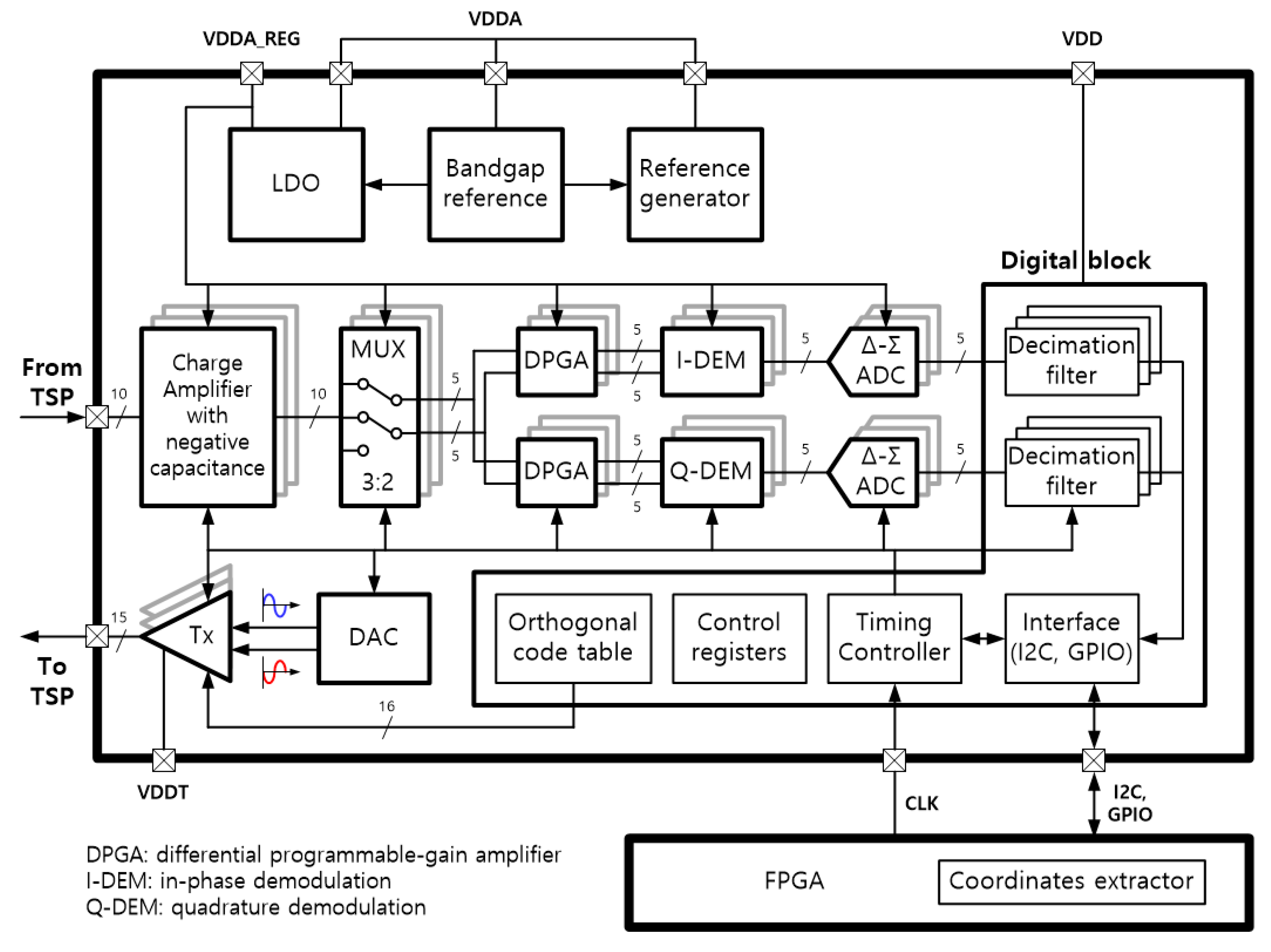
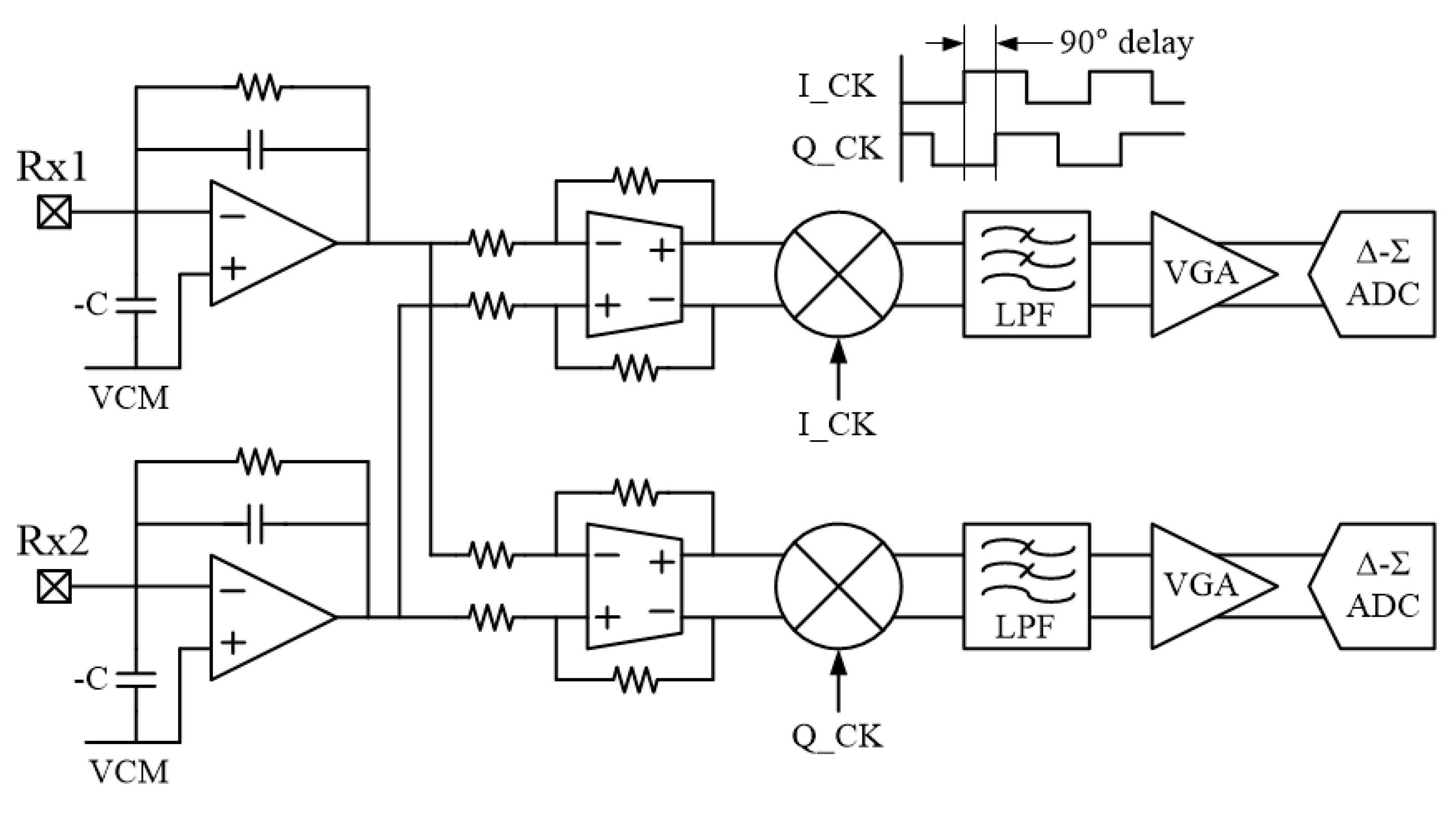
3.1. Block Diagram of Touch Screen Controller
3.2. IQ Demodulation
3.3. Remaining Blocks for Analog Signal Processing
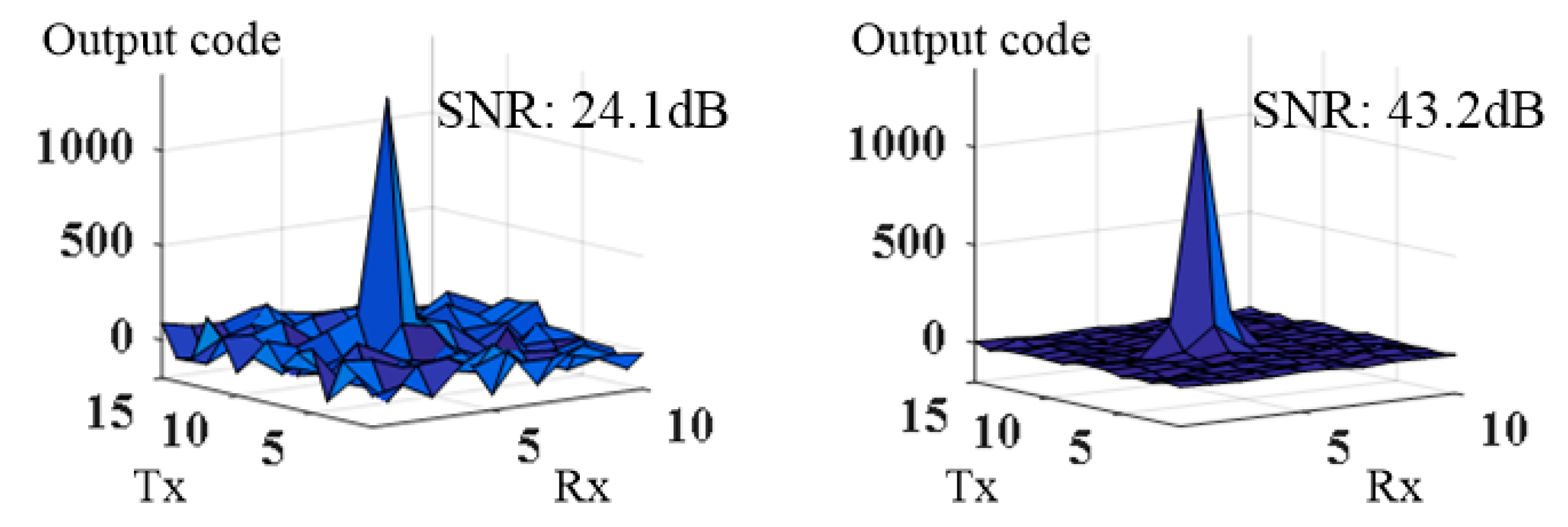
4. Measurement Results and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Carey, J. Noise Wars: Projected Capacitance Strikes Back; Cypress Semiconductor Corporation: San Jose, CA, USA, 2012. [Google Scholar]
- Kim, H.-R.; Choi, Y.-K.; Byun, S.-H.; Kim, S.-W.; Choi, K.-H.; Ahn, H.-Y.; Park, J.; Lee, D.-Y.; Wu, Z.-Y.; Kwon, H.-D.; et al. A mobile-display-driver IC embedding a capacitive-touch-screen controller system. In Proceedings of the 2010 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 7–11 February 2010; pp. 114–115. [Google Scholar]
- Xu, J.; Zhang, Q.; Li, H.; Liu, T.; Chen, S.; Shang, F. Simulation of color moire pattern in LCD-based metal mesh touch screen. SID 2017, 48, 2087–2090. [Google Scholar] [CrossRef]
- Yang, J.-H.; Park, S.-H.; Choi, J.-M.; Kim, H.-S.; Park, C.-B.; Ryu, S.-T.; Cho, G.-H. A highly noise-immune touch controller using filtered-delta-integration and a charge-interpolation technique for 10.1-inch capacitive touch-screen panels. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 17–21 February 2013; pp. 390–391. [Google Scholar]
- Park, J.-E.; Lim, D.-H.; Jeong, D.-K. A reconfigurable 40-to-67 dB SNR, 50-to-6400 Hz frame-rate, column-parallel readout IC for capacitive touch-screen panels. IEEE J. Solid State Circuits 2014, 49, 2305–2318. [Google Scholar] [CrossRef]
- Park, J.-E.; Park, J.; Hwang, Y.-H.; Oh, J.; Jeong, D.-K. A 100-TRX-channel configurable 85-to-385Hz-frame-rate analog front-end for touch controller with highly enhanced noise immunity of 20VPP. In Proceedings of the 2016 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 31 January–4 February 2016; pp. 210–211. [Google Scholar]
- Kim, K.-D.; Byun, S.-H.; Choi, Y.-K.; Baek, J.-H.; Cho, H.-H.; Ahn, H.-Y.; Lee, C.-J.; Cho, M.-S.; Lee, J.-H.; Kim, S.-W.; et al. A capacitive touch controller robust to display noise for ultrathin touch screen displays. In Proceedings of the 2012 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 19–23 February 2012; pp. 116–117. [Google Scholar]
- Wikipedia. Available online: https://en.wikipedia.org/wiki/Electrical_resistivity_and_conductivity (accessed on 27 July 2018).
- Sklar, B. Digital Communication, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Walker, G.; Fihn, M. LCD In-cell touch. Inf. Disp. 2010, 26, 8–14. [Google Scholar]
- Chen, H.-Y.; Lu, Y.-C.; Chang, K.-M.; Yeh, Y.-H.; Chen, K.-J. Highly sensitive touch panel technology for foldable AMOLED. SID 2017, 48, 2052–2055. [Google Scholar] [CrossRef]
- GSMARENA. Available online: https://www.gsmarena.com (accessed on 27 July 2018).
- Allen, P.E.; Holberg, D.R. CMOS Analog Circuit Design, 2nd ed.; Oxford University Press: New York, NY, USA, 2002. [Google Scholar]
- Kim, K.-D.; Kang, S.; Choi, Y.-K.; Lee, K.-H.; Lee, C.-H.; Lee, J.-C.; Choi, M.; Ko, K.; Jung, J.; Park, N.; et al. A fully-differential capacitive touch controller with input common-mode feedback for symmetric display noise cancellation. In Proceedings of the 2014 Symposium on VLSI Circuits Digest of Technical Papers, Honolulu, HI, USA, 10–13 June 2014; pp. 1–2. [Google Scholar]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240 Hz frame rate mutual capacitor 30 × 24 touch-screen panel read-out IC using code-division multiple sensing technique. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 17–21 February 2013; pp. 388–389. [Google Scholar]
- Park, J.; Lee, C.-J.; Kim, D.-Y.; Chun, J.-H.; Kim, J. Application of weighing matrices to simultaneous driving technique for capacitive touch sensors. IEEE Trans. Consum. Electron. 2015, 61, 261–269. [Google Scholar] [CrossRef]
- Markus, J.; Silva, J.; Temes, G. Theory and applications of incremental ∆∑ converters. IEEE Trans. Circuits Syst. I 2004, 51, 678–690. [Google Scholar] [CrossRef]
- Ko, S.; Shin, H.; Lee, J.; Jang, H.; So, B.-C.; Yun, I.; Lee, K. Low noise capacitive sensor for multi-touch mobile handset’s applications. In Proceedings of the 2010 IEEE Asian Solid-State Circuits Conference, Beijing, China, 8–10 November 2010; pp. 1–4. [Google Scholar]
- Heo, S.; Ma, H.; Song, J.; Park, K.; Choi, E.-H.; Kim, J.; Bien, F. 72 dB SNR, 240 Hz frame rate readout IC with differential continuous-mode parallel architecture for larger touch-screen panel applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 960–971. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d | εr = 4 | εr = 10 |
|---|---|---|
| 50 [µm] | 5.65 [pF] | 14.2 [pF] |
| 10 [µm] | 28.3 [pF] | 71.0 [pF] |
| ISSCC 10’ [2] | ISSCC 13’ [4] | JSSC 14’ [5] | TCAS-I 16’ [19] | This Work | |
|---|---|---|---|---|---|
| Process | 90 nm | 0.35 µm | 0.18 µm | 0.18 µm | 0.35 µm |
| TSP Type | Self | Mutual | Mutual | Mutual | Mutual |
| Channel | 1 TRX: 24 | Tx: 27 Rx: 43 | Tx: 12 Rx: 8 | Tx: 32 Rx: 10 | Tx: 15 Rx: 10 |
| SNR | 36 dB | 39 dB | 60 dB | 72 dB | 43 dB |
| Frame Rate | 120 Hz | 120 Hz | 200 Hz | 240 Hz | 250 Hz |
| Supply | 3 V | 3.3 V | 2.1–3.3 V | 3.3 V | 3.3 V |
| Power | 12 mW | 18.7 mW | 6.26 mW | 42.6 mW | 12.8 mW |
| Area | 3.65 mm2 | 10.4 mm2 | 2.2 mm2 | 1.25 mm2 | 2 4.89 mm2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-J.; Park, J.K.; Piao, C.; Seo, H.-E.; Choi, J.; Chun, J.-H. Mutual Capacitive Sensing Touch Screen Controller for Ultrathin Display with Extended Signal Passband Using Negative Capacitance. Sensors 2018, 18, 3637. https://doi.org/10.3390/s18113637
Lee C-J, Park JK, Piao C, Seo H-E, Choi J, Chun J-H. Mutual Capacitive Sensing Touch Screen Controller for Ultrathin Display with Extended Signal Passband Using Negative Capacitance. Sensors. 2018; 18(11):3637. https://doi.org/10.3390/s18113637
Chicago/Turabian StyleLee, Chang-Ju, Jong Kang Park, Canxing Piao, Han-Eol Seo, Jaehyuk Choi, and Jung-Hoon Chun. 2018. "Mutual Capacitive Sensing Touch Screen Controller for Ultrathin Display with Extended Signal Passband Using Negative Capacitance" Sensors 18, no. 11: 3637. https://doi.org/10.3390/s18113637