Flying Ad Hoc Networks: A New Domain for Network Communications



Abstract
:1. Introduction
2. State of the Art
2.1. Mobility Models
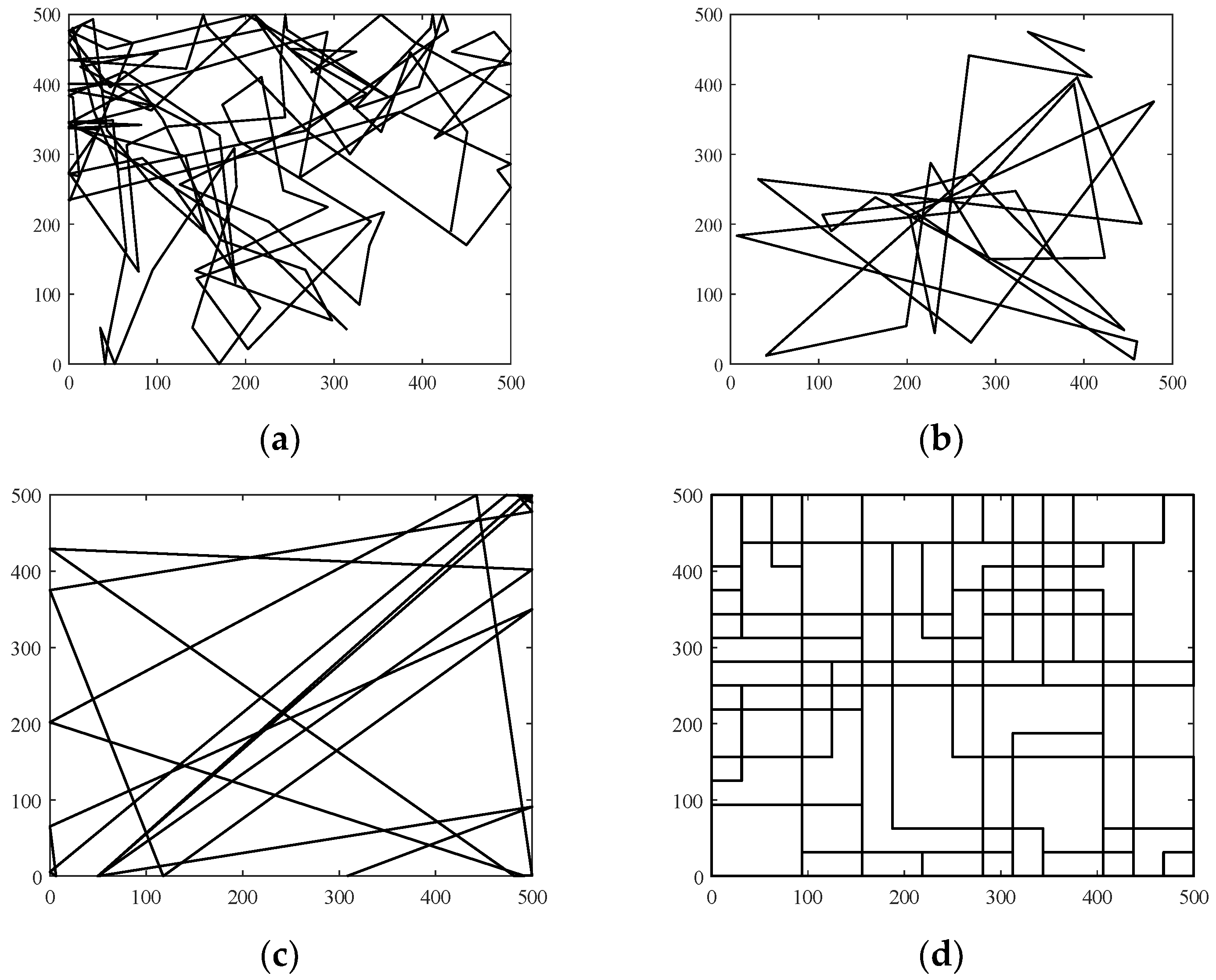
- Pure Randomized Mobility Models: Random mobility models are the simplest and most common models to simulate the movement of nodes in an ad hoc network. Each node randomly selects its direction, speed, and time, independently of other nodes. In this group, the following mobility models stand out: Random Walk [21], Random Waypoint [17], Random Direction [22], and Manhattan Grid [23]. Figure 2 graphically depicts the characteristics of these well-known models. For instance, in the Random Waypoint mobility model (RWP), each node randomly chooses both its destination within the simulation area and the speed S between [Smin, Smax]. After this, the node starts moving at that constant speed towards the destination, and once the node reaches its destination, it remains static for a time Tpause, as shown in Figure 2b. Given that the RWP mobility model tends to group the nodes in the center of the simulation area, a node using the random direction (RD) mobility model searches for the edge of the area, remains static when arrives, and then selects a new direction angle (Figure 2c).
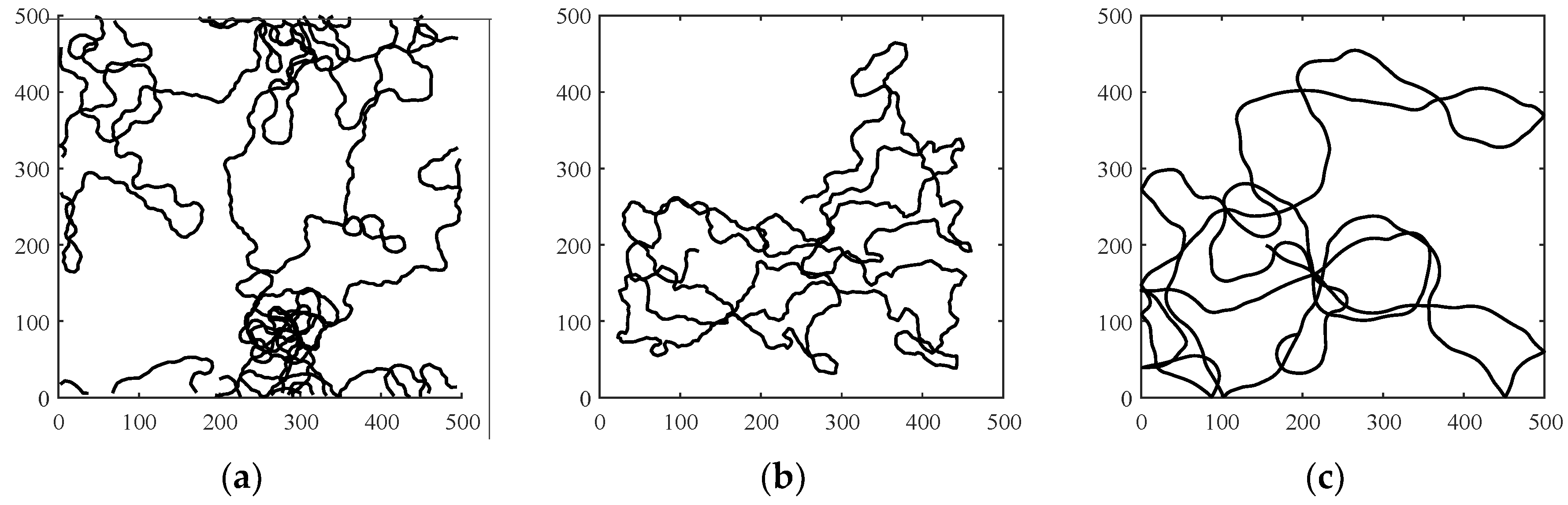
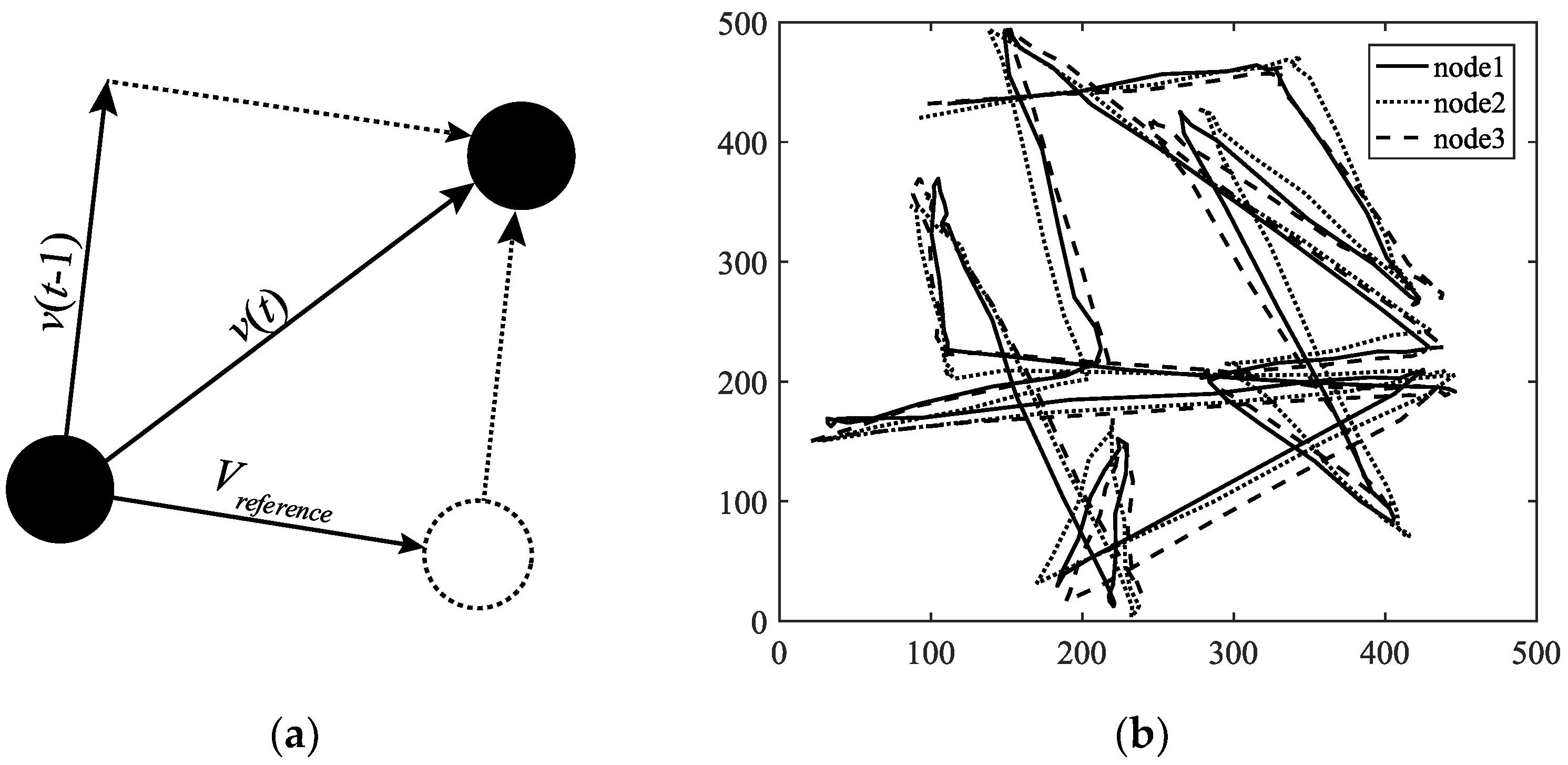
- Time-Dependent Mobility Models: Movement is based on mathematical equations that depend on both the instant when the simulation is calculated and the state of each node to avoid sudden changes in speed and direction. The most prominent examples in this category are: Boundless Simulation Area [24], Gauss-Markov [25], Enhanced Gauss-Markov [26], 3-D-Gauss-Markov [27], and Smooth Turn [19]. The main disadvantage of the Boundless Simulation Area (BSA) mobility model (see Figure 3a) is that when a node disappears along an edge, it reappears on its opposite edge, which could be undesirable. On the other hand, the Gauss-Markov (GM) mobility model (see Figure 3b) is more realistic than the RW, RWP, and RD models, but it does not allow for modeling the behavior of FW-UAV, especially turns. The Enhanced Gauss-Markov mobility model (EGM) is a modification of the GM model specifically proposed for FANETs. The results obtained with this model are similar to the behavior that a FW-UAV would have while flying, since there are no sudden stops or sharp turns within the simulation. In addition, the EGM has a progressive boundary-avoidance mechanism to avoid edges, which allows soft curves at the boundaries. The three-dimensional Gauss-Markov mobility model (3D-GM) is another modification of the GM model designed for FANETs with the main characteristic of including mobility in the three dimensions, eliminating the bounce generated at the edges of the simulation area, as in the EGM model. Last, in the Smooth Turn (ST) mobility model (see Figure 3c), a node randomly selects a point along the line perpendicular to its heading direction and flies in circles around that point for a random time.
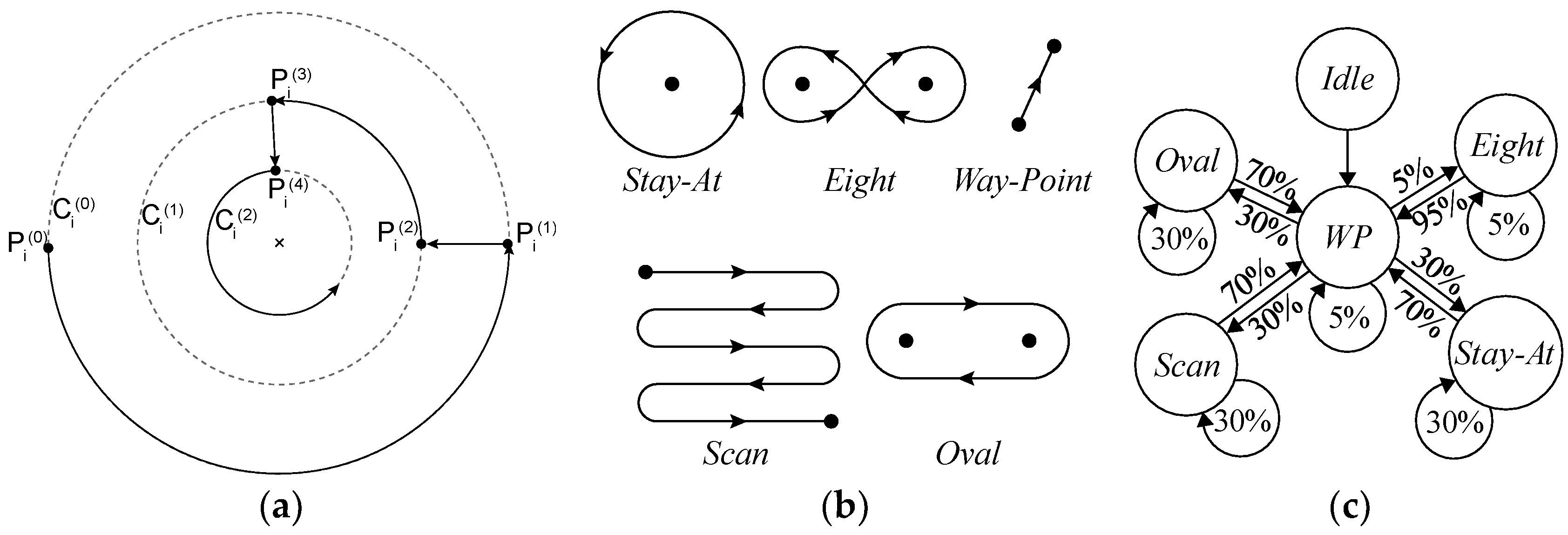
- Path-Planned Mobility Models: These mobility models are characterized by nodes following a pre-calculated trajectory without taking any random direction. The nodes are forced to follow a series of movement patterns, only changing randomly between the different patterns that each model has. Within this category we have the Semi-Random Circular Movement [28] and the Paparazzi [18] models. The former (SRCM) is a suitable model to simulate the behavior of UAVs that are flying over a point in circles with different radius collecting information, as shown in Figure 4a. The latter (PPRZM) is a stochastic mobility model based on the Paparazzi autopilot software for UAV [29]. This Paparazzi autopilot presents five possible movements: Stay-At, Eight, Way-Point, Scan, and Oval (represented in Figure 4b). Thus, the PPRZM mobility model is based on a state machine where each state is one of the possible movements that a UAV can do. The state machine is showed in Figure 4c.
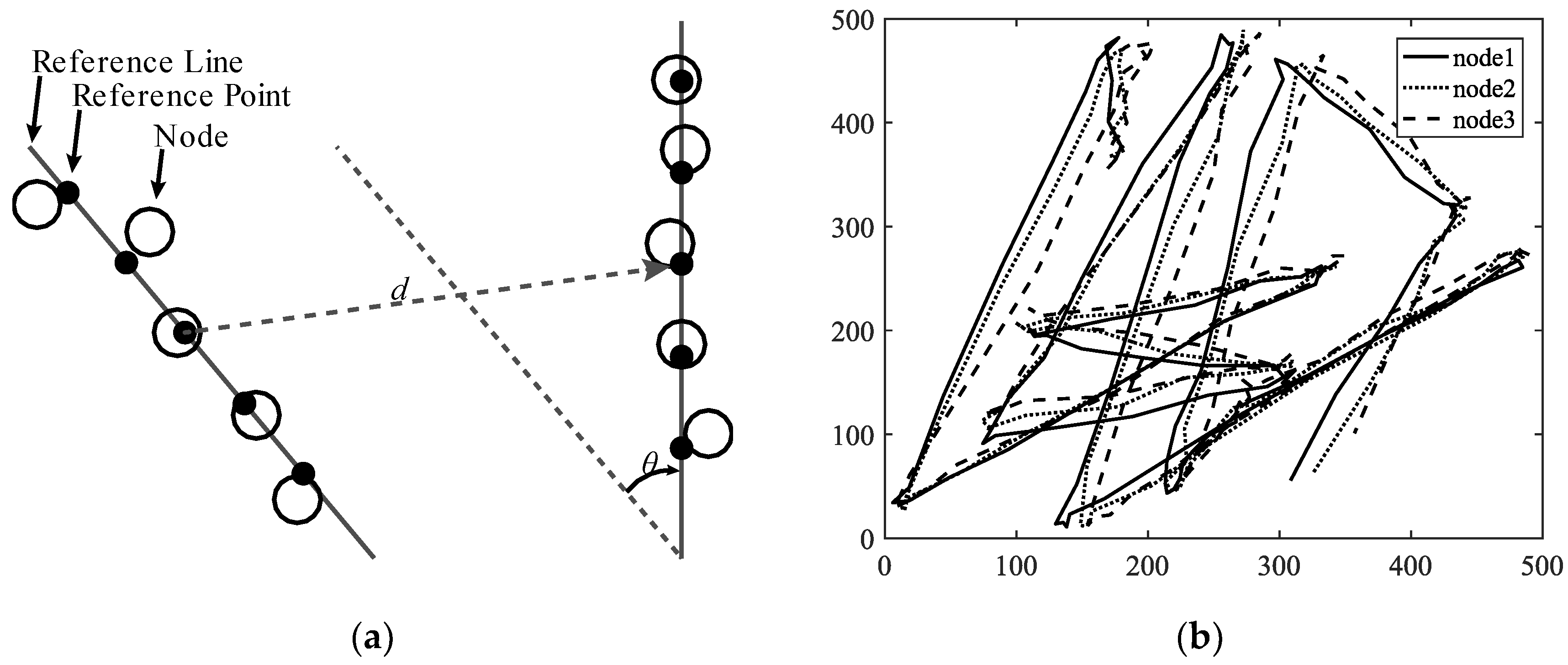
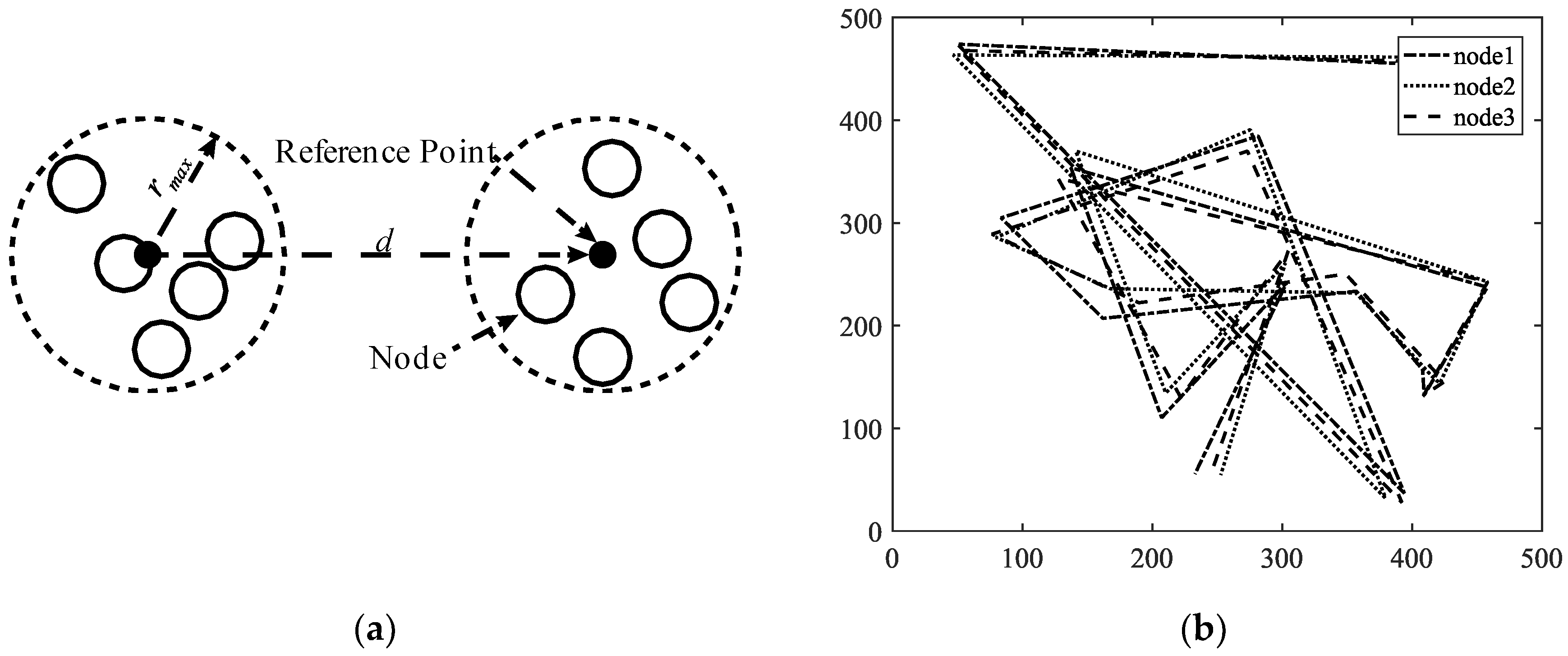
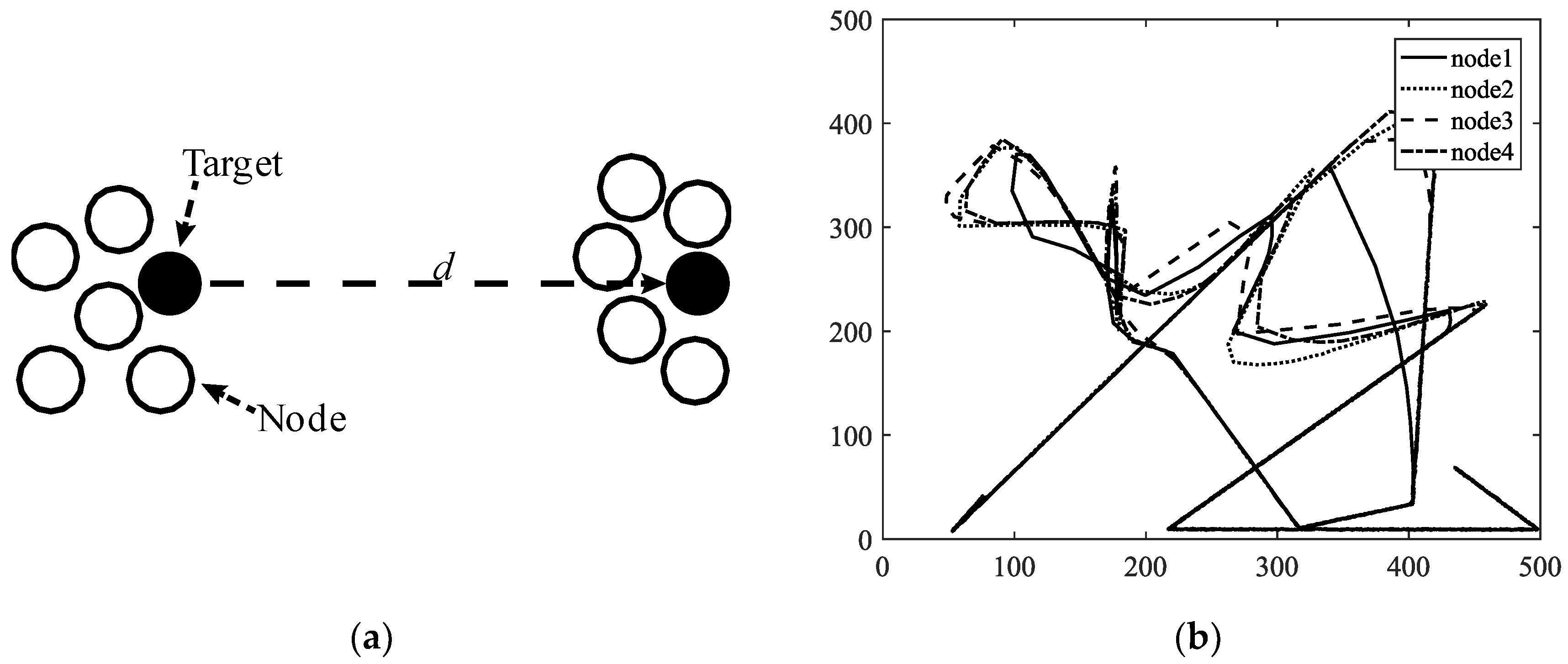
- Group Mobility Models: They are based on the fact that the different nodes of the network move together around a common point. This behavior has great advantages, especially in the field of FANETs, where this approach can be used in many applications. Three representative examples can be found in this category, namely, Exponential Correlated Random [30], Particle Swarm [31], and Reference Point Group Mobility [32]. The Exponential Correlated Random (ECR) mobility model is similar to the time-dependent mobility models. To control the groups of nodes a set of variables is added, whose configuration is not straightforward. The Particle Swarm Mobility Model (PSMM) is based on the iterative optimization method Particle Swarm Optimization (PSO) [33]. This model calculates the speed and direction of each node according to the previous speed/direction and the position in which nodes are located with respect to the reference point. The operating principle of PSMM is illustrated in Figure 5a. In the Reference Point Group Mobility (RPGM) model, nodes are grouped into clusters. Each cluster has a center, which can be a logical center or a leading node. The center follows an RWP mobility model and the nodes will be moving around the center (see Figure 5b). This mobility model has numerous variants, the most important ones are Column (CLMN) [21] (see Figure 6), Nomadic Community (NC) [21] (see Figure 7), and Purse [21]. For instance, nodes in the Purse (PRS) mobility model try to catch a target, which may be another node or an imaginary point as represented in Figure 8. As stated by its authors, [21] “you have an apple-pie in your hand and some flies are trying to land on it. You move the pie to avoid them to reach it… Flies are the nodes.”
- Hybrid Mobility Models: This set of hybrid models is usually based on a combination of previous models. As an example, the Hybrid Markov Mobility Model with Pheromones (H3MP) [34] is based on the Markov and the Distributed Pheromone Repel [35] models joining the advantages of both. Whereas Markov chains improve the overall behavior of the UAV, the pheromone approach allows a more precise control of mobility in a local and dynamic way by sharing knowledge among UAVs.
2.2. Positioning Protocols
- Height-based positioning. First, there are several studies that analyze the impact of the height of the UAV node on the achieved coverage. In Reference [43], the optimal position of a UAV node that maximizes coverage through a mathematical model is obtained. The channel model on which they based their study contains statistical parameters for the urban environment defined by the International Telecommunication Union (ITU). Thus, their results included a formula to obtain the optimal altitude based on the maximum allowable losses, and some additional statistical parameters. Mozaffari et al. [44] extended the work done in Reference [43]. They obtained the optimum height where to place a UAV to offer the maximum coverage area with the minimum transmitted power. In addition, they studied the use of two UAVs to provide coverage in two scenarios, namely, interference-free and full interference between both UAVs. In the first scenario, the height and distance between UAVs was calculated for optimal deployment in an area. In the second scenario, the existence of interference did not allow full coverage of the entire area, but the results showed the existence of an optimal separation between both UAVs, which provided the highest proportion of coverage area. Nevertheless, the authors used a theoretical channel model, without relying on any of the existing channel models for the U2G communication channel. Similarly, the authors in Reference [45] also investigated the optimal height of a UAV to provide coverage. In this case, they considered that the channel presented path loss and scattering. Particularly, they employed a Rician fading model with dependence on the elevation angle. They showed that there is an optimal position that maximizes the coverage area and presented the lowest losses.
- Network-based positioning. Regarding the control of nodes positioning, there are a large number of studies. As an example, the deployment of a network with FW-UAV is evaluated in [46]. These nodes cannot remain static in a point, but they must be flying over a point. The proposed algorithm dynamically adjusts the position of the nodes and the radius of the UAVs according to the demand of the users at ground level, increasing the performance of the network in terms of the probability of coverage and reduction of the delay. Inspired by the typical movements of bacteria (which move according to their attraction to attractors or away from repellents, aka chemotaxis), the authors in Reference [47] obtained the optimal position of a set of nodes of a FANETs by setting the height of each node, since vertical movements require a greater amount of energy than horizontal movements. In Reference [41], the authors analyzed the optimal deployment of a FANET obtaining the probability of coverage for the UAV–ground link. Then, based on the circle packing theory, the number of available nodes, and the gain and bandwidth of the antennas, they obtained the position and the optimal altitude for each node in an optimal deployment. From a different perspective, Lyu et al. [48] investigated the minimum number of UAVs needed to provide coverage in an area, ensuring that each terrestrial node in the ground has coverage with at least one UAV node. To do so, UAVs were placed following an inward spiral path until all the terrestrial nodes were covered. The authors assumed that the UAV–ground channel presented LoS and they fixed the transmitted power of the UAV to obtain the minimum signal-to-noise ratio (SNR) in the receivers. Another solution was introduced with Self-Deployable Point Coverage (SDPC) [49]. SDPC studies the optimal positioning of FANETs nodes in coverage expansion tasks in cases of disasters, looking for the optimal position to cover the largest number of people per UAV, and maintaining a connection between each UAV. Whereas SDPC can be used with RW-UAVs nodes, its application with FW-UAVs is limited because it does not consider smooth trajectories and progressive curves. The authors in Reference [50] proposed an algorithm to find the optimal position of a UAV based on fine-grained LOS information in a highly urban area. Finally, Chetlur Ravi and Dhillon [51] obtained an expression of the coverage probability for the UAV–ground link modeling the base stations as a uniform binomial point process, and in Reference [52], Sharma et al. employed a neural-based cost function to deploy multiple UAVs in an area with full coverage. Their results showed that they were able to achieve higher capacity than the existing cellular network.
2.3. Propagation Models
- Theoretical models: Regarding the theoretical models, in Reference [16], the authors proposed a very detailed propagation model of the U2G channel for aerial small cells. This model considered a lot of factors that other theoretical models do not include such as the altitude of the UAV, the particular environments (urban, sub-urban, dense-urban, and urban high-rise), rain (light, moderate, and heavy) multipath fading, LoS probability, shadowing, wave propagation, gaseous absorption, Doppler spread, and other additional losses that may exist. However, this model did not take into account the impact that the UAV can have on the radiation pattern of the communication device. We will see this limitation in all similar studies. Holis et al. [54] proposed another model of theoretical propagation losses for the U2G channel in different types of urban areas in the frequency band between 2 and 6 GHz (since these are some of the frequencies used for mobile systems). In addition, this model considered the elevation angle between the UAV and the terrestrial node, as well as the possibility of LoS. Finally, the model was compared with a set of real measurements showing that the applicability of this propagation model was likely.
- Empirical models: On the other hand, there are empirical models obtained from a series of measurements made in different urban/rural scenarios. Indeed, there is a large number of articles related to obtaining a propagation loss model in an empirical way. For example, in References [55,56] the U2G channel model was obtained from a set of measurements in the 800 MHz band. In Reference [57], the authors made a summary of a U2G measurements campaign. They showed the outcomes obtained and the propagation models calculated in a series of experiments conducted in conjunction with NASA. Khawaja et al. [58] studied the ultrawideband (UWB) propagation models for U2G channels. These UWB models allow signals with a greater bandwidth, a lower attenuation by penetration, and a great co-existence with narrow band signals.
- Semi-empirical models: The semi-empirical models are initiated as theoretical models and then varied according to a set of measures to match reality. In Reference [59], the authors started with a series of measurements of the RSS (received signal strength) of the U2G channel in an urban area, and then selected the propagation model that most resembled the collected measurements. It was Rice + Log-Normal (Loo’s model [60]). Finally, they modified the chosen model such that the results with that model corresponded to the obtained measures. Goddemeier et al. [13] assessed another semi-empirical model, but in this case for the U2U channel. To do this, the authors extended the Rice channel model in the U2U link to take into account the multipath effect of the signals produced by an UAV flying at a fixed altitude. In this study, the antennas of the UAV were placed in a vertical position, which makes the reflections with the ground less frequent and have a lower power. In addition, the impact of the UAV on the transmitted power was not known, since only the horizontal plane of the complete RP was studied.
- Well-known models: There are other works in the related literature that focus on verifying the adequacy of already-known propagation models in FANET scenarios. For example, in Reference [61], Jung et al. proposed a method to select the environment or areas (urban, sub-urban, rural, mountainous, near the sea, etc.) where the air network is going to be deployed in order to choose the U2G channel propagation model that more adapts to reality. The results showed that their method worked for a wide variety of environments. Daniel et al. [62] analyzed the applicability of traditional propagation models to FANETs. For this, the authors made a comparison of different propagation models used for conventional mobile systems (e.g., Cost 231-Hata, Walfish-Ikegami, Erceg, Har, WINNER II B1, C1, C2, and D2) with the ray tracing model. They found out that the WINNER II C1 and Walfish-Ikegami models are suitable options when the air node is below 30 m, otherwise the free space model predicted propagation losses quite well.
3. Case Study: Understanding the Impact of Embedded Devices on the Radiation Pattern of UAVs
3.1. Related Work
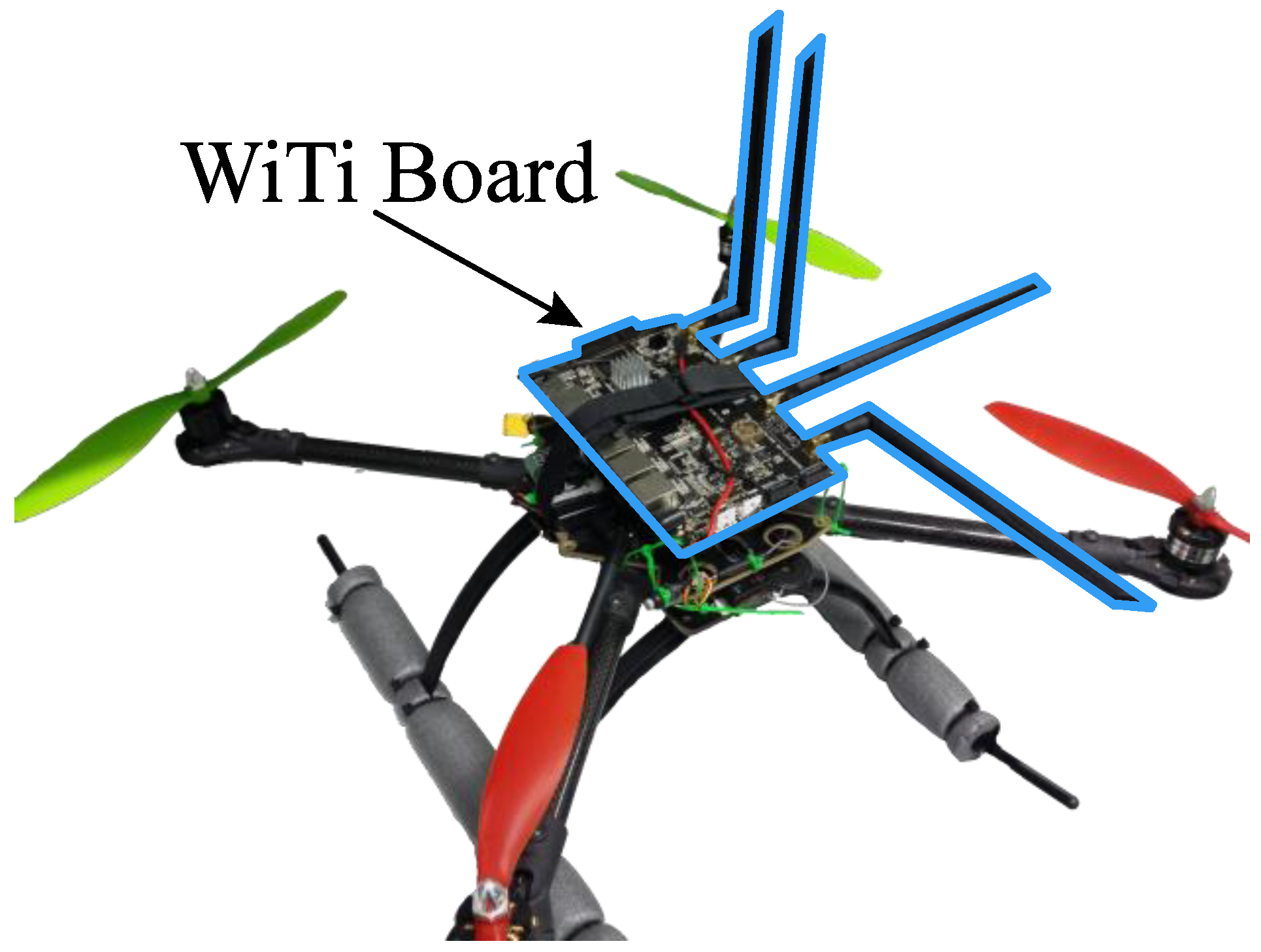
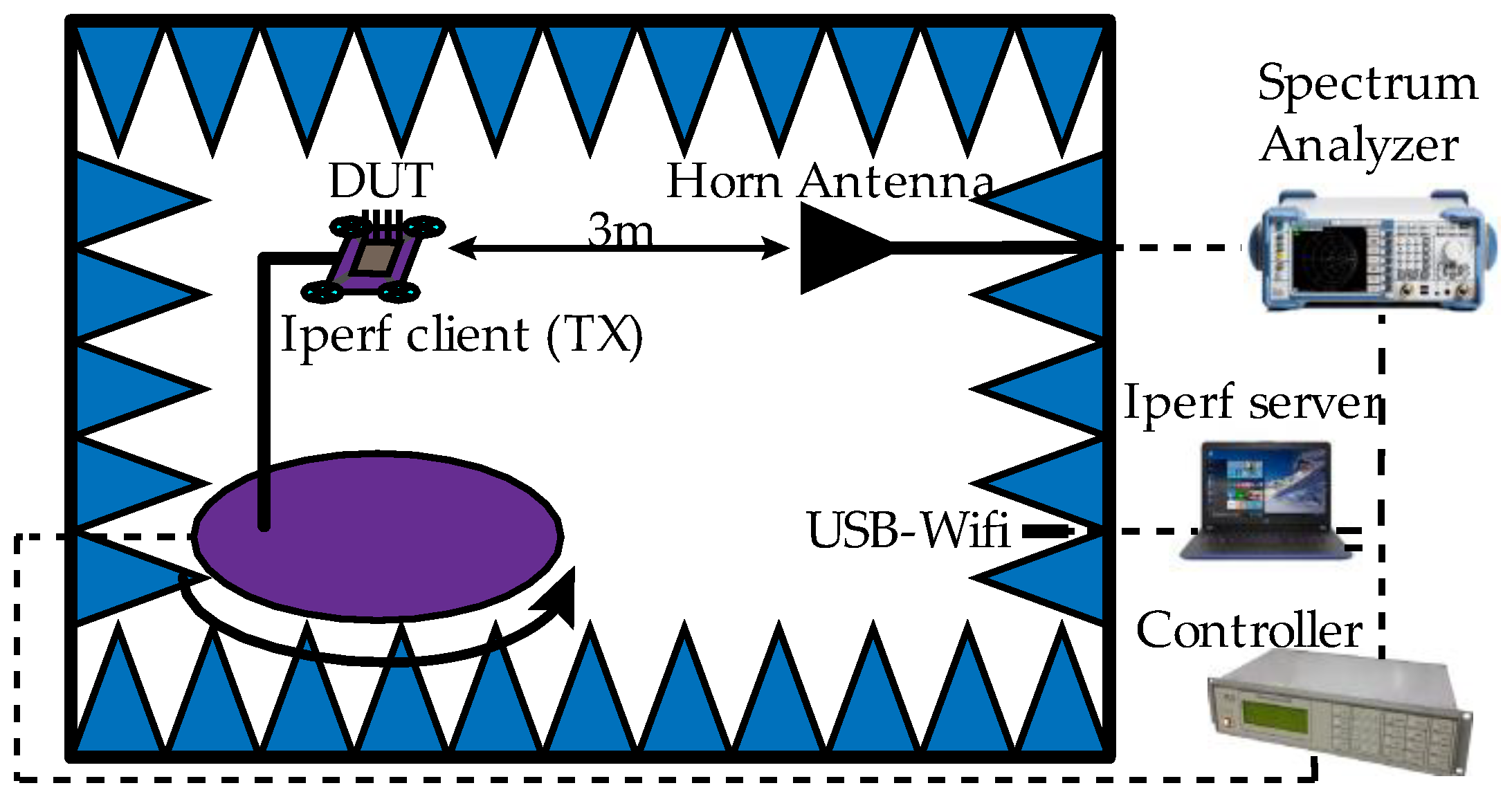
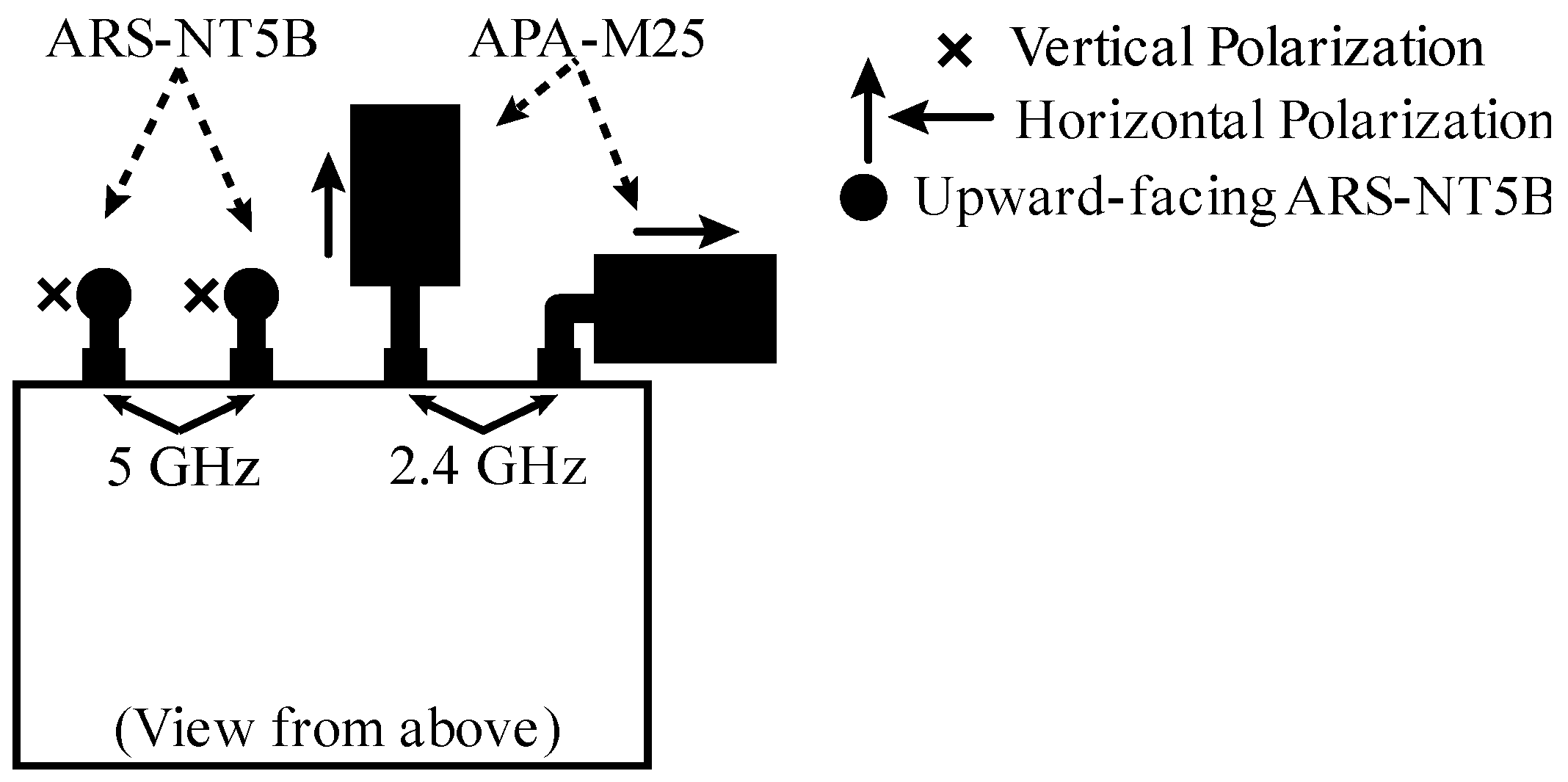
3.2. Experimental Setup
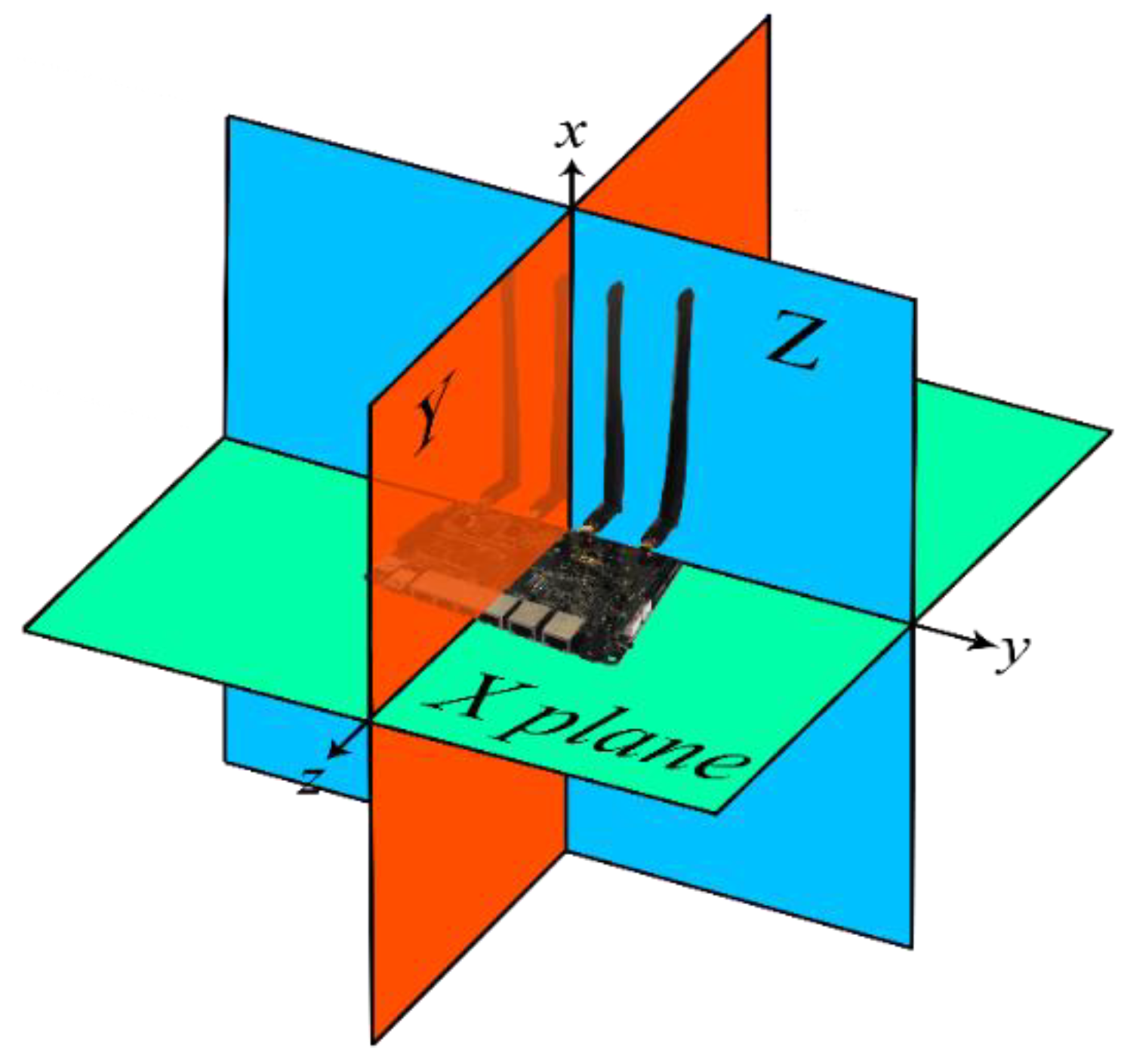
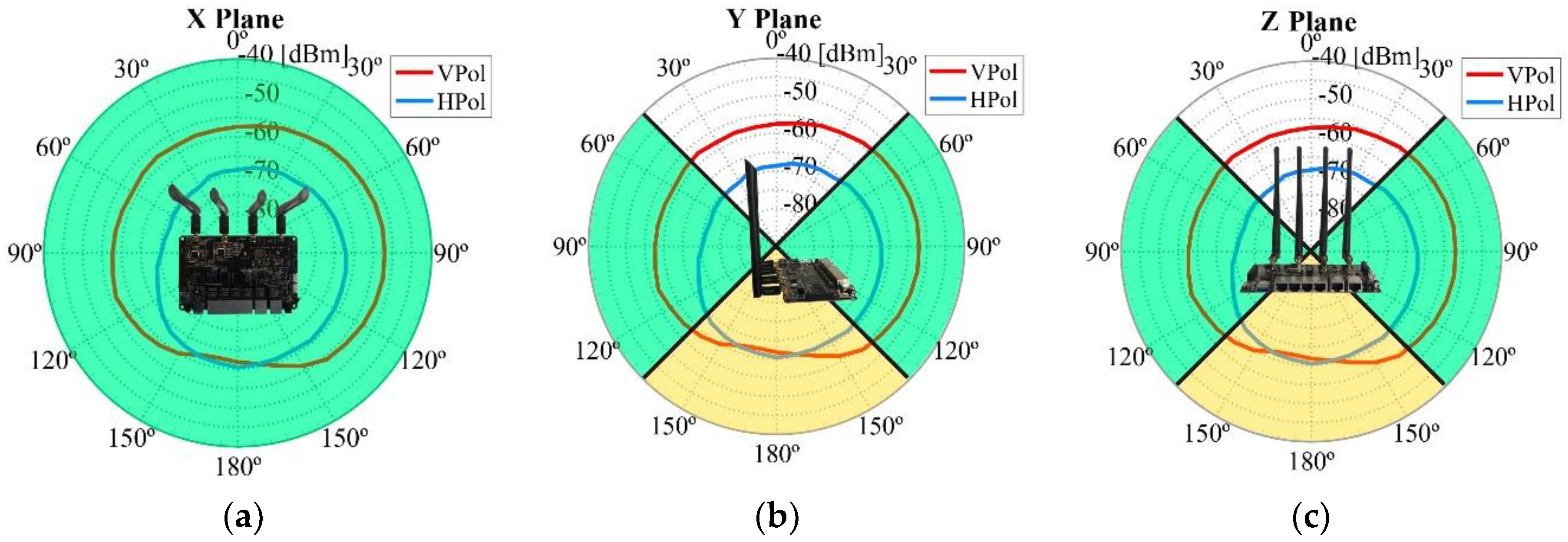
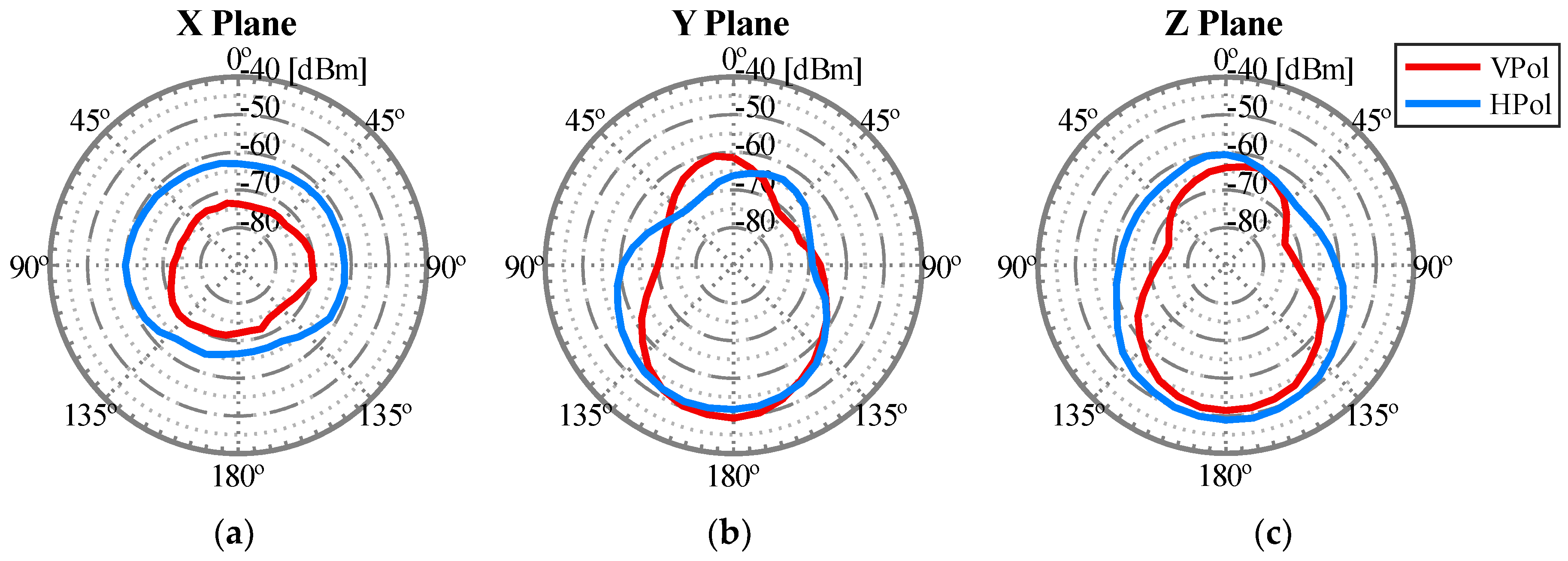
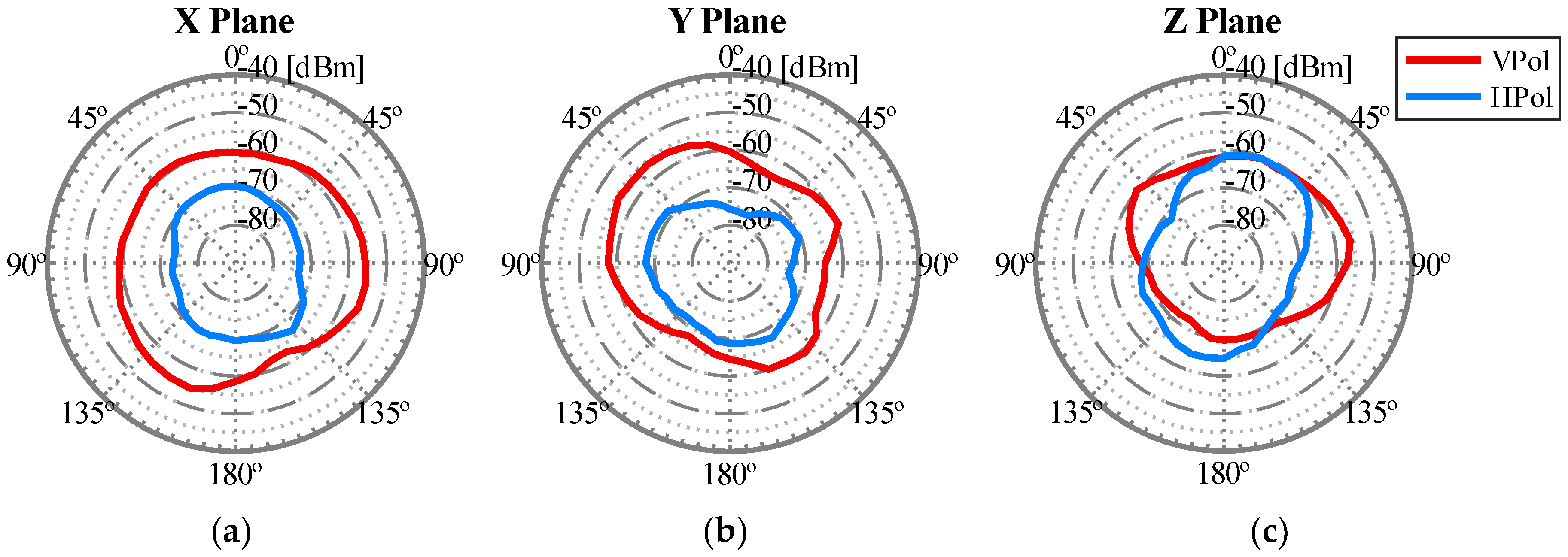
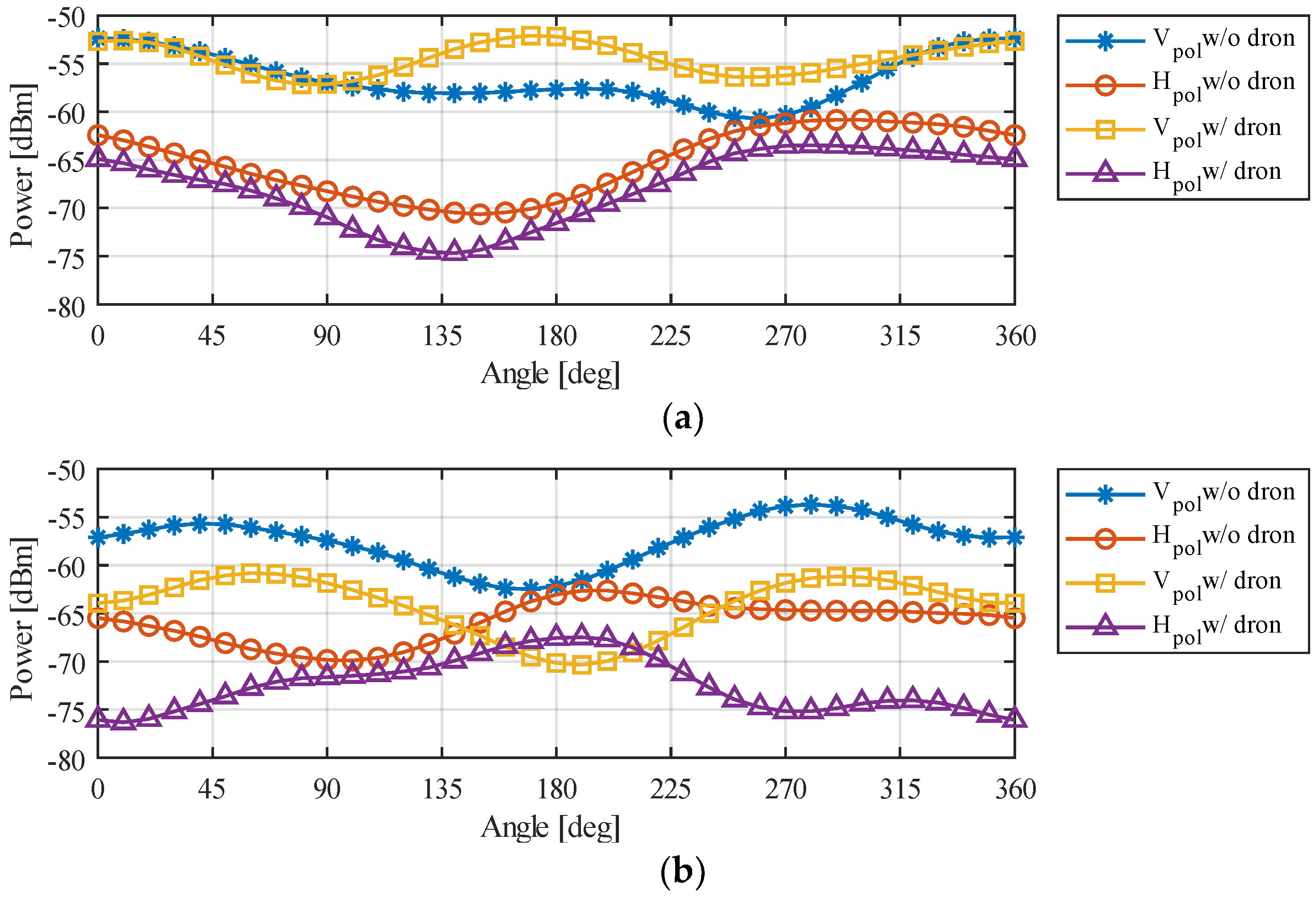
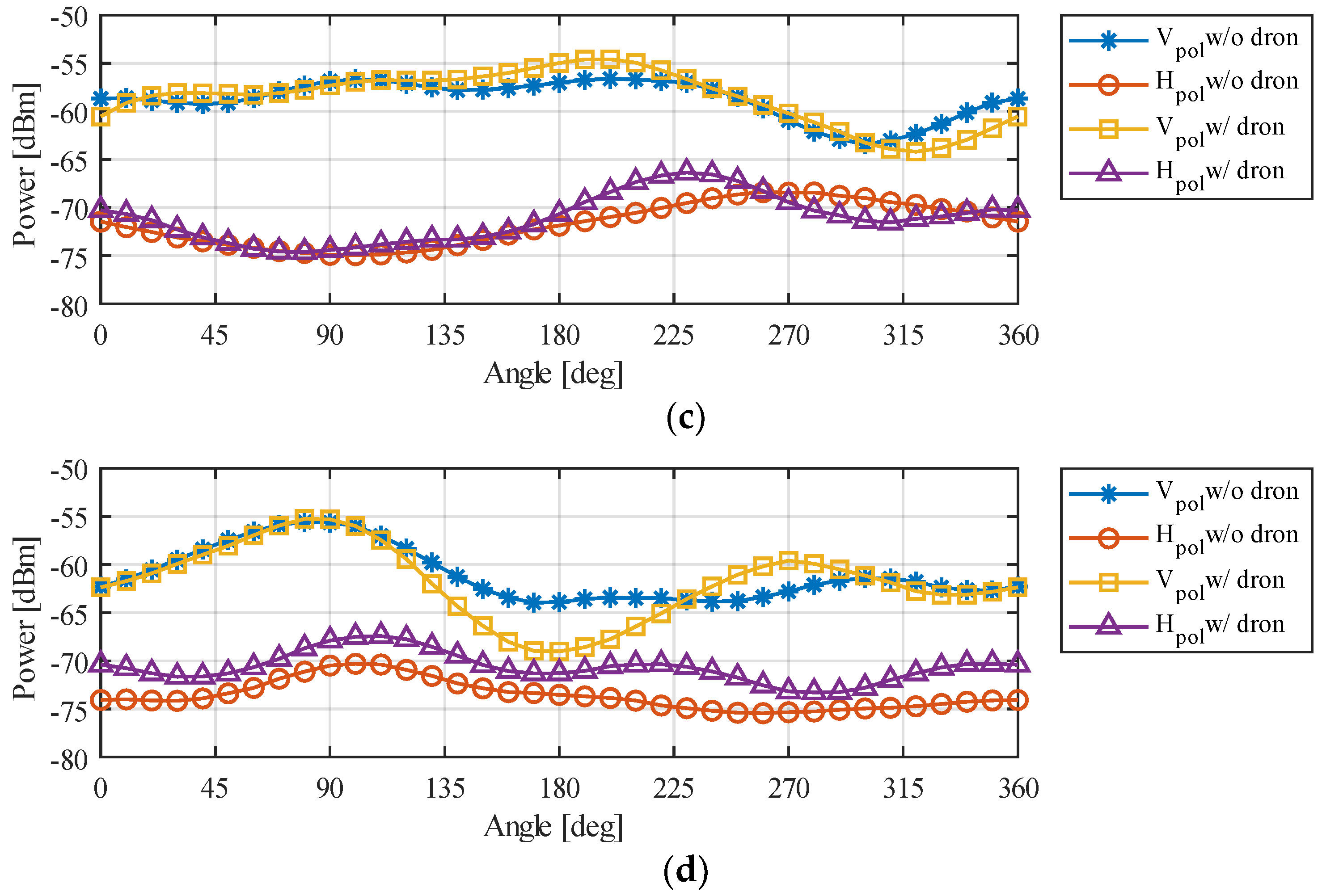
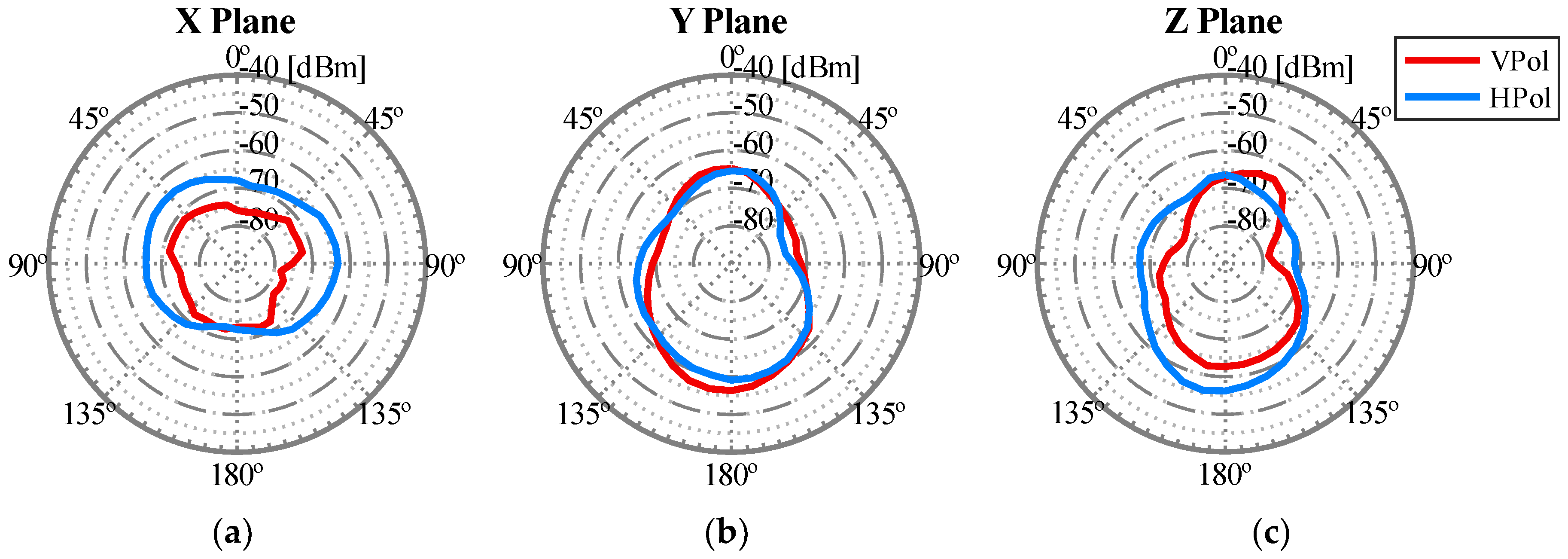
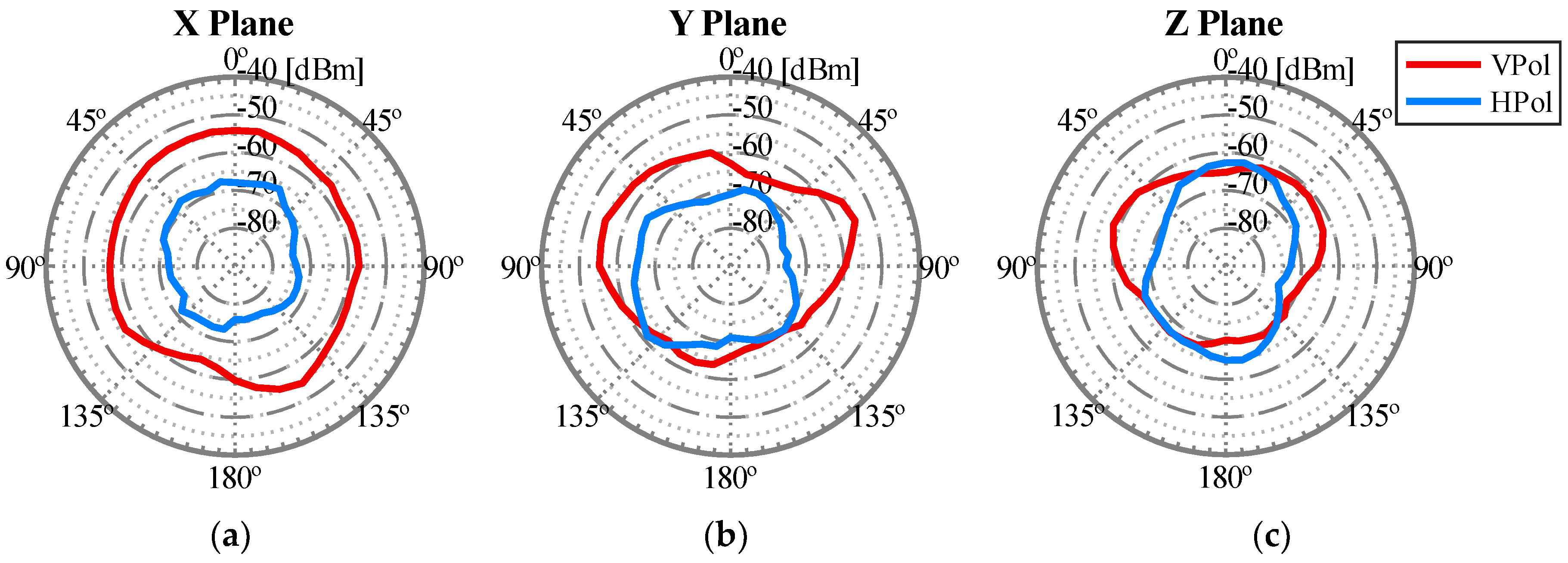
3.3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Sánchez-García, J.; García-Campos, J.M.; Arzamendia, M.; Reina, D.G.; Toral, S.L.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Bettstetter, C.; Christian, B. Experimental Analysis of Multipoint-to-Point UAV Communications with IEEE 802.11n and 802.11ac. In Proceedings of the 2015 IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015. [Google Scholar]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Yanmaz, E.E.; Costanzo, C.; Bettstetter, C.; Elmenreich, W. A discrete stochastic process for coverage analysis of autonomous UAV networks. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010. [Google Scholar]
- Bekmezci, İ.I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Liu, S.; Ölveczky, P.C.; Meseguer, J. Modeling and analyzing mobile ad hoc networks in Real-Time Maude. J. Log. Algebraic Methods Program. 2016, 85, 34–66. [Google Scholar] [CrossRef] [Green Version]
- Jalooli, A.; Shaghaghi, E.; Jabbarpour, M.R.; Md Noor, R.; Yeo, H.; Jung, J.J. Intelligent advisory speed limit dedication in highway using VANET. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef] [PubMed]
- Masini, B.M.; Bazzi, A.; Zanella, A. A Survey on the Roadmap to Mandate on Board Connectivity and Enable V2V-Based Vehicular Sensor Networks. Sensors 2018, 18, 2207. [Google Scholar] [CrossRef] [PubMed]
- Asadpour, M.; Van Den Bergh, B.; Giustiniano, D.; Hummel, K.A.; Pollin, S.; Plattner, B. Micro aerial vehicle networks: An experimental analysis of challenges and opportunities. IEEE Commun. Mag. 2014, 52, 141–149. [Google Scholar] [CrossRef]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Achieving air-ground communications in 802.11 networks with three-dimensional aerial mobility. In Proceedings of the IEEE INFOCOM 2013, Turin, Italy, 14–19 April 2013; pp. 120–124. [Google Scholar]
- Goddemeier, N.; Wietfeld, C. Investigation of air-to-air channel characteristics and a UAV specific extension to the rice model. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Pinto, L.R.; Moreira, A.; Almeida, L.; Rowe, A. Characterizing Multihop Aerial Networks of COTS Multirotors. IEEE Trans. Ind. Inform. 2017, 13, 898–906. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Sanchez-Iborra, R.; Cano, M.-D.; Sanchez-Aarnoutse, J.C.; Garcia-Haro, J. WiFi networks on drones. In Proceedings of the 2016 ITU Kaleidoscope Academic Conference: ICTs for a Sustainable World, ITU WT 2016, Bangkok, Thailand, 14–16 November 2016. [Google Scholar]
- Pokkunuru, A.; Zhang, Q.; Wang, P. Capacity analysis of aerial small cells. In Proceedings of the 2017 IEEE International Conference on Communications, Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Johnson, D.B.; Maltz, D.A. Dynamic Source Routing in Ad Hoc Wireless Networks. In Mobile Computing; Springer US: Boston, MA, USA, 1996; pp. 153–181. [Google Scholar]
- Bouachir, O.; Abrassart, A.; Garcia, F.; Larrieu, N. A mobility model for UAV ad hoc network. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 383–388. [Google Scholar]
- Wan, Y.; Namuduri, K.; Zhou, Y.; Fu, S. A smooth-turn mobility model for airborne networks. IEEE Trans. Veh. Technol. 2013, 62, 3359–3370. [Google Scholar] [CrossRef]
- Lessmann, J.; Janacik, P.; Lachev, L.; Orfanus, D. Comparative Study of Wireless Network Simulators. In Proceedings of the Seventh Intternational Conference on Networking (icn 2008), Cancun, Mexico, 13–18 April 2008. [Google Scholar]
- Sánchez, M.; Manzoni, P. ANEJOS: A Java based simulator for ad hoc networks. Future Gener. Comput. Syst. 2001, 17, 573–583. [Google Scholar] [CrossRef]
- Royer, E.M.; Melliar-Smith, P.M.; Moser, L.E. An analysis of the optimum node density for ad hoc mobile networks. In Proceedings of the ICC 2001 IEEE International Conference on Communications. Conference Record (Cat. No.01CH37240), Helsinki, Finland, 11–14 June 2001; pp. 857–861. [Google Scholar]
- Bai, F.; Sadagopan, N.; Helmy, A. The IMPORTANT framework for analyzing the impact of mobility on performance of RouTing protocols for Adhoc NeTworks. Ad Hoc Netw. 2003, 1, 383–403. [Google Scholar] [CrossRef]
- Haas, Z.J.; Pearlman, M.R. The performance of a new routing protocol for the reconfigurable wireless networks. In Proceedings of the 1998 IEEE International Conference on Communications, Atlanta, GA, USA, 7–11 June 1998; pp. 156–160. [Google Scholar]
- Tolety, V. Load Reduction in Ad Hoc Networks Using Mobile Servers. Master’s Thesis, Colorado School of Mines, Golden, CO, USA, 1999. [Google Scholar]
- Biomo, J.M.M.; Kunz, T.; St-Hilaire, M. An enhanced Gauss-Markov mobility model for simulations of unmanned aerial ad hoc networks. In Proceedings of the 2014 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–22 May 2014. [Google Scholar] [CrossRef]
- Broyles, D.; Jabbar, A.; Sterbenz, J. Design and analysis of a 3–D gauss-markov mobility model for highly-dynamic airborne networks. Proc. Int. Telemetering Conf. 2010, 46, 388–404. [Google Scholar]
- Wang, W.; Guan, X.; Wang, B.; Wang, Y. A novel mobility model based on semi-random circular movement in mobile ad hoc networks. Inform. Sci. 2010, 180, 399–413. [Google Scholar] [CrossRef]
- “Paparazzi-UAV”. Available online: http://wiki.paparazziuav.org/wiki/Main_Page (accessed on 24 January 2018).
- Bergamo, M.; Hain, R.; Kasera, K.; Li, D.; Ramanathan, R.; Steenstrup, M. System Design Specification for Mobile Multimedia Wireless Network (MMWN) (Draft); DARPA Peoject DAAB07-95-C-D156; DARPA: Arlington, VA, USA, October 1996.
- Li, X. A Particle Swarm Mobility Model for Flying Ad Hoc Networks. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017. [Google Scholar]
- Hong, X.; Gerla, M.; Pei, G.; Chiang, C.-C. A group mobility model for ad hoc wireless networks. In Proceedings of the 2nd ACM International Workshop on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Seattle, WA, USA, 20 August 1999; pp. 53–60. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar] [CrossRef]
- Kieffer, E.; Danoy, G.; Bouvry, P.; Nagih, A. Hybrid mobility model with pheromones for UAV detection task. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the Second International Conference on Wireless and Mobile Communications, ICWMC 2006, Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar]
- Bujari, A.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; Palazzi, C.E.; Ronzani, D. Flying ad-hoc network application scenarios and mobility models. Int. J. Distrib. Sens. Netw. 2017, 13, 1–17. [Google Scholar] [CrossRef]
- Orfanus, D.; De Freitas, E.P. Comparison of UAV-based reconnaissance systems performance using realistic mobility models. In Proceedings of the 2014 6th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), St. Petersburg, Russia, 6–8 October 2014; pp. 248–253. [Google Scholar] [CrossRef]
- Weicker, N.; Szabo, G.; Weicker, K.; Widmayer, P. Evolutionary multiobjective optimization for base station transmitter placement with frequency assignment. IEEE Trans. Evol. Comput. 2003, 7, 189–203. [Google Scholar] [CrossRef]
- Mathar, R.; Niessen, T. Optimum positioning of base stations for cellular radio networks. Wirel. Netw. 2000, 6, 421–428. [Google Scholar] [CrossRef]
- Tutschku, K. Demand-based Radio Network Planning of Cellular Mobile Communication Systems. In Proceedings of the Seventeenth Annual Joint Conference of the IEEE Computer and Communications Societies, San Francisco, CA, USA, 29 March–2 April 1998; pp. 1054–1061. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient Deployment of Multiple Unmanned Aerial Vehicles for Optimal Wireless Coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Han, Z.; Swindlehurst, A.L.; Liu, K.J.R. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles. IEEE Trans. Veh. Technol. 2009, 58, 3533–3546. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. arXiv, 2015; arXiv:1509.01655. [Google Scholar]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Optimal UAV positioning for terrestrial-aerial communication in presence of fading. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar] [CrossRef]
- Fadlullah, Z.M.; Takaishi, D.; Nishiyama, H.; Kato, N.; Miura, R. A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks. IEEE Netw. 2016, 30, 100–105. [Google Scholar] [CrossRef]
- Gruber, M. Role of altitude when exploring optimal placement of UAV access points. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Garcia, J.; Garcia-Campos, J.M.; Toral, S.L.; Reina, D.G.; Barrero, F. A Self Organising Aerial Ad Hoc Network Mobility Model for Disaster Scenarios. In Proceedings of the 2015 International Conference on Developments of E-Systems Engineering (DeSE), Duai, UAE, 13–14 December 2015; pp. 35–40. [Google Scholar] [CrossRef]
- Chen, J.; Gesbert, D. Optimal positioning of flying relays for wireless networks: A LOS map approach. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar] [CrossRef]
- Chetlur Ravi, V.V.; Dhillon, H.S. Downlink coverage probability in a finite network of unmanned aerial vehicle (UAV) base stations. In Proceedings of the 2016 IEEE 17th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Edinburgh, UK, 3–6 July 2016. [Google Scholar] [CrossRef]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-Assisted Heterogeneous Networks for Capacity Enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Friis, H.T. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Holis, J.; Pechac, P. Elevation dependent shadowing model for mobile communications via high altitude platforms in built-up areas. IEEE Trans. Antennas Propag. 2008, 56, 1078–1084. [Google Scholar] [CrossRef]
- Cai, X.; Gonzalez-Plaza, A.; Alonso, D.; Zhang, L.; Rodriguez, C.B.; Yuste, A.P.; Yin, X. Low altitude UAV propagation channel modelling. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 1443–1447. [Google Scholar]
- Amorim, R.; Nguyen, H.; Mogensen, P.; Kovács, I.Z.; Wigard, J.; Sørensen, T.B. Radio Channel Modeling for UAV Communication over Cellular Networks. IEEE Wirel. Commun. Lett. 2017, 6, 514–517. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Air-ground channels for UAS: Summary of measurements and models for L- and C-bands. In Proceedings of the 2016 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 19–21 April 2016; pp. 1–11. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D. UWB channel sounding and modeling for UAV air-to-ground propagation channels. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar] [CrossRef]
- Simunek, M.; Fontan, F.P.; Pechac, P. The UAV low elevation propagation channel in urban areas: Statistical analysis and time-series generator. IEEE Trans. Antennas Propag. 2013, 61, 3850–3858. [Google Scholar] [CrossRef]
- Model, S. A statistical model for a land mobile satellite link. IEEE Trans. Veh. Technol. 1985, 34, 122–127. [Google Scholar] [CrossRef]
- Jung, Y.; Kang, Y.; Son, K. Air-Ground Channel Model Selection Method for UAS Communications Using Digital Elevation Data. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 115–118. [Google Scholar]
- Daniel, K.; Putzke, M.; Dusza, B.; Wietfeld, C.; Models, A.A.C. Three Dimensional Channel Characterization for Low Altitude Aerial Vehicles. Evaluation 2010, 756–760. [Google Scholar] [CrossRef]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802.11a-based UAV-to-ground links. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1280–1284. [Google Scholar]
- Matolak, D.W.; Sun, R. Air-Ground Channel Characterization for Unmanned Aircraft Systems: The Over-Freshwater Setting. In Proceedings of the 2014 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 April 2014. [Google Scholar] [CrossRef]
- Cheng, C.; Hsiao, P.; Kung, H.; Vlah, D. Performance Measurement of 802.11a Wireless Links from UAV to Ground Nodes with Various Antenna Orientations. In Proceedings of the 15th International Conference on Computer Communications and Networks, Arlington, VA, USA, 9–11 October 2006; pp. 303–308. [Google Scholar]
- Mqmaker, “WiTi board.”. Available online: https://openwrt.org/toh/hwdata/mqmaker/mqmaker_witi_board_512mb (accessed on 19 October 2018).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of UAV | Speed | Energy Autonomy | Mobility Degree | Static Hover | Altitude | |
|---|---|---|---|---|---|---|
| Large-UAV | FW | High | High | Low | No | High |
| RW | Low-Med | Low-Med | Med-High | Yes | Med-High | |
| Small-UAV | FW | Med-High | Med-High | Low-Med | No | Low-Med |
| RW | Low | Low | High | Yes | Low | |
| Characteristics | MANET | VANET | FANET |
|---|---|---|---|
| Node Mobility | Lower (2-D) | Low (2-D) | RW-UAV: High (3-D) FW-UAV: Medium (3-D) |
| Node Speed | Lower (6 km/h) | Medium–High (20–100 km/h) | RW-UAV: Medium (50 km/h) FW-UAV: High (100 km/h) |
| Mobility Model | Random | Manhattan models | RW-UAV: RWP [17] FW-UAV: PPRZM [18]/ST [19] |
| Topology Change | Low | Medium | High |
| Energy Constraints | Medium | Low | RW-UAV: High (15–30 min) FW-UAV: Medium (to 5 h) |
| Class | Ref | Mobility Model | RW/FW UAV | Applications |
|---|---|---|---|---|
| Pure Randomized | [21] | RW | RW | Environmental sensing/Traffic and urban Monitoring |
| [17] | RWP | RW | ||
| [22] | RD | RW | ||
| [23] | MG | RW | ||
| Time-Dependent | [24] | BSA | RW | Environmental sensing/Search and rescue |
| [25] | GM | RW | ||
| [26] | EGM | RW/FW | ||
| [27] | 3D-GM | RW/FW | ||
| [19] | ST | RW/FW | ||
| Path-Planned | [28] | SRCM | RW | Agricultural management/Traffic and urban Monitoring |
| [18] | PPRZM | RW/FW | ||
| Group | [35] | ECR | RW | Environmental sensing/Search and rescue |
| [31] | PSMM | RW/FW | ||
| [32] | RPGM | RW | ||
| [21] | CLMN | RW | ||
| [21] | NC | RW | ||
| [21] | PRS | RW/FW | ||
| Hybrid | [34] | H3MP | RW | Surveillance/Search and rescue |
| Ref. | Type | Channel | Frequency (GHz) |
|---|---|---|---|
| [16] | Theoretical | UAV–Ground | 2.4 |
| [54] | Theoretical | UAV–Ground | 2–6 |
| [55] | Empirical | UAV–Ground | 1.8–5.76 |
| [56] | Empirical | UAV–Ground | 0.8 |
| [57] | Empirical | UAV–Ground | 0.96–0.977 |
| 5.030–5.091 | |||
| [58] | Empirical | UAV–Ground | 3.1–5.3 |
| [59] | Semi-Empirical | UAV–Ground | 2 |
| [13] | Semi-Empirical | UAV–UAV | 2.4 |
| Device or Parameter | Configuration |
|---|---|
| TX Antennas (Antenna Gain 2.4/5 GHz) | ARS-NT5B (5/5 dBi), APA-M25 (8/10 dBi) |
| RX Antenna (Antenna Gain 2.4/5 GHz) | HF906 (10/11 dBi) |
| Distance between TX and RX Antennas | 3 m |
| Traffic Generator | Iperf v2.0.9 (TCP default configuration) |
| Center Frequency | 2.462/5.210 GHz |
| Transmitted BW | 40/40 MHz |
| Captured BW | 20/20 MHz |
| TX Power | 20/20 dBm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guillen-Perez, A.; Cano, M.-D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. https://doi.org/10.3390/s18103571
Guillen-Perez A, Cano M-D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors. 2018; 18(10):3571. https://doi.org/10.3390/s18103571
Chicago/Turabian StyleGuillen-Perez, Antonio, and Maria-Dolores Cano. 2018. "Flying Ad Hoc Networks: A New Domain for Network Communications" Sensors 18, no. 10: 3571. https://doi.org/10.3390/s18103571