Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things

 ,
,
Abstract
:1. Introduction
2. Evolving Conceptual Model
- Airborne operation
- Flight endurance of 20 min
- Payload of 7 kg
- 40 km/h cruise speed
- 2000 m of flight range
- Hovering and moving on water body
- Endurance of 40 min
- 30 km/h cruise speed
- 2000 m range
3. Design Process
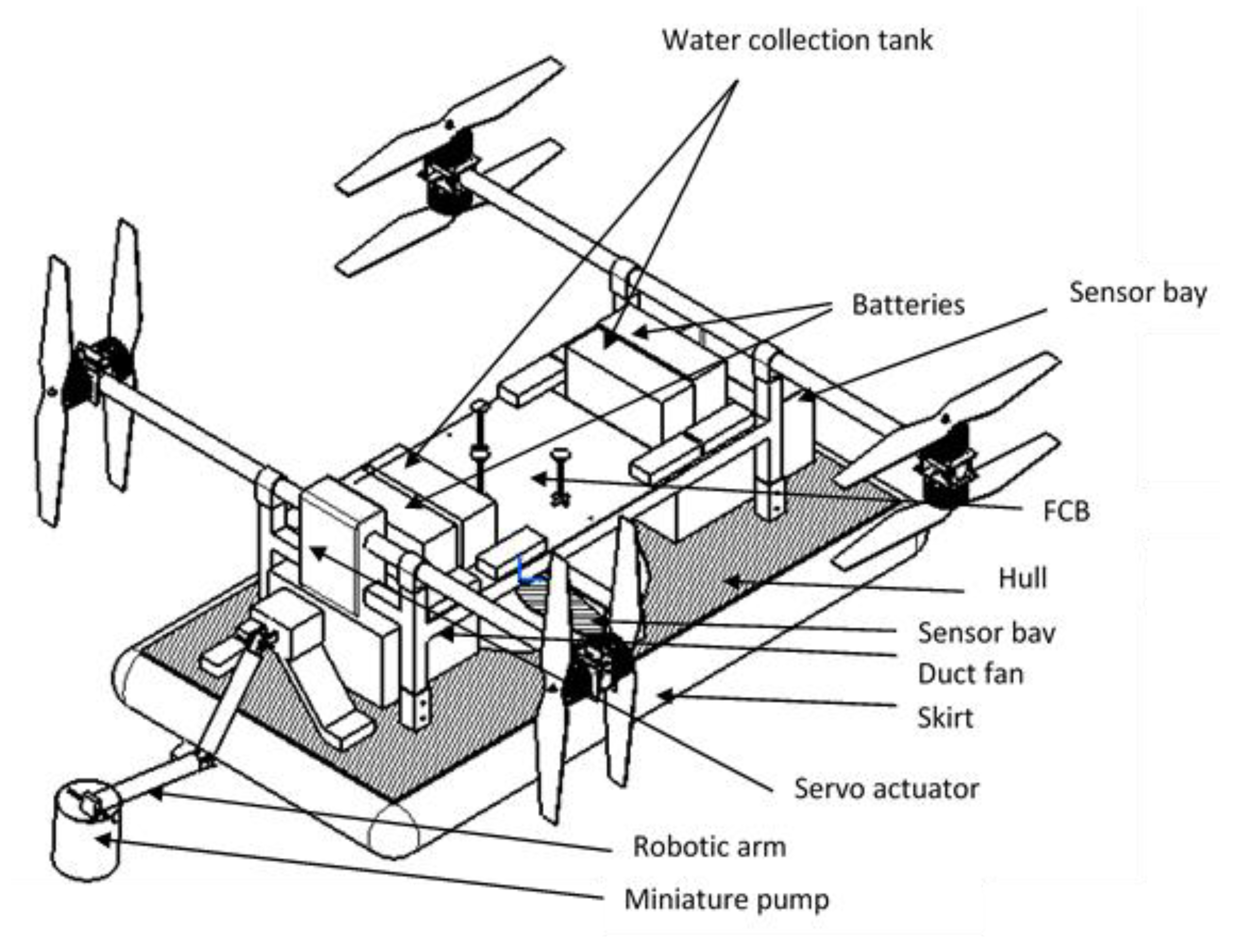
3.1. Design of Hovercraft
3.1.1. Selection of Skirt Material
3.1.2. Selection of Hull Material
3.2. Multicopter Design
3.2.1. Propulsion
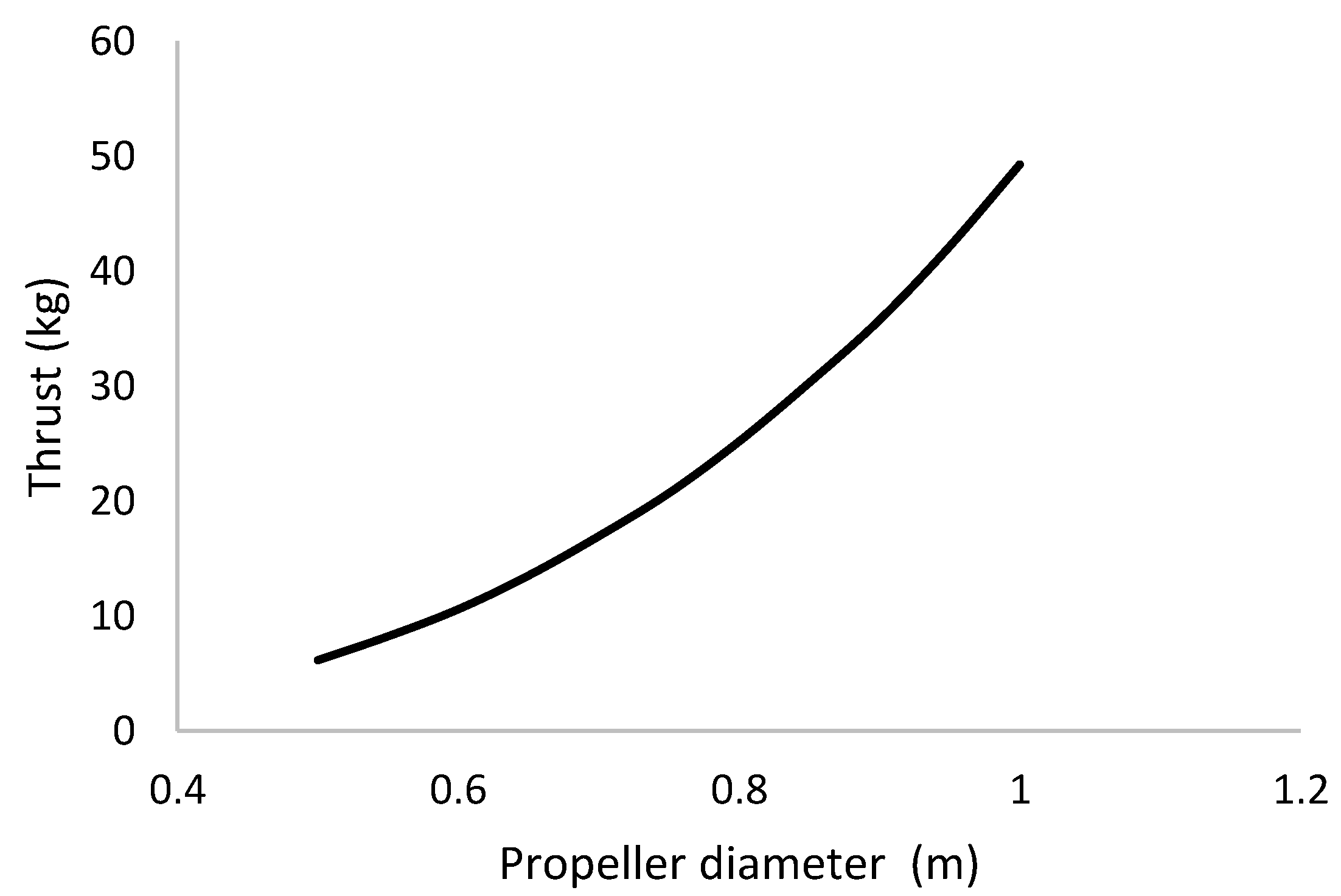
3.2.2. Selection of Propeller
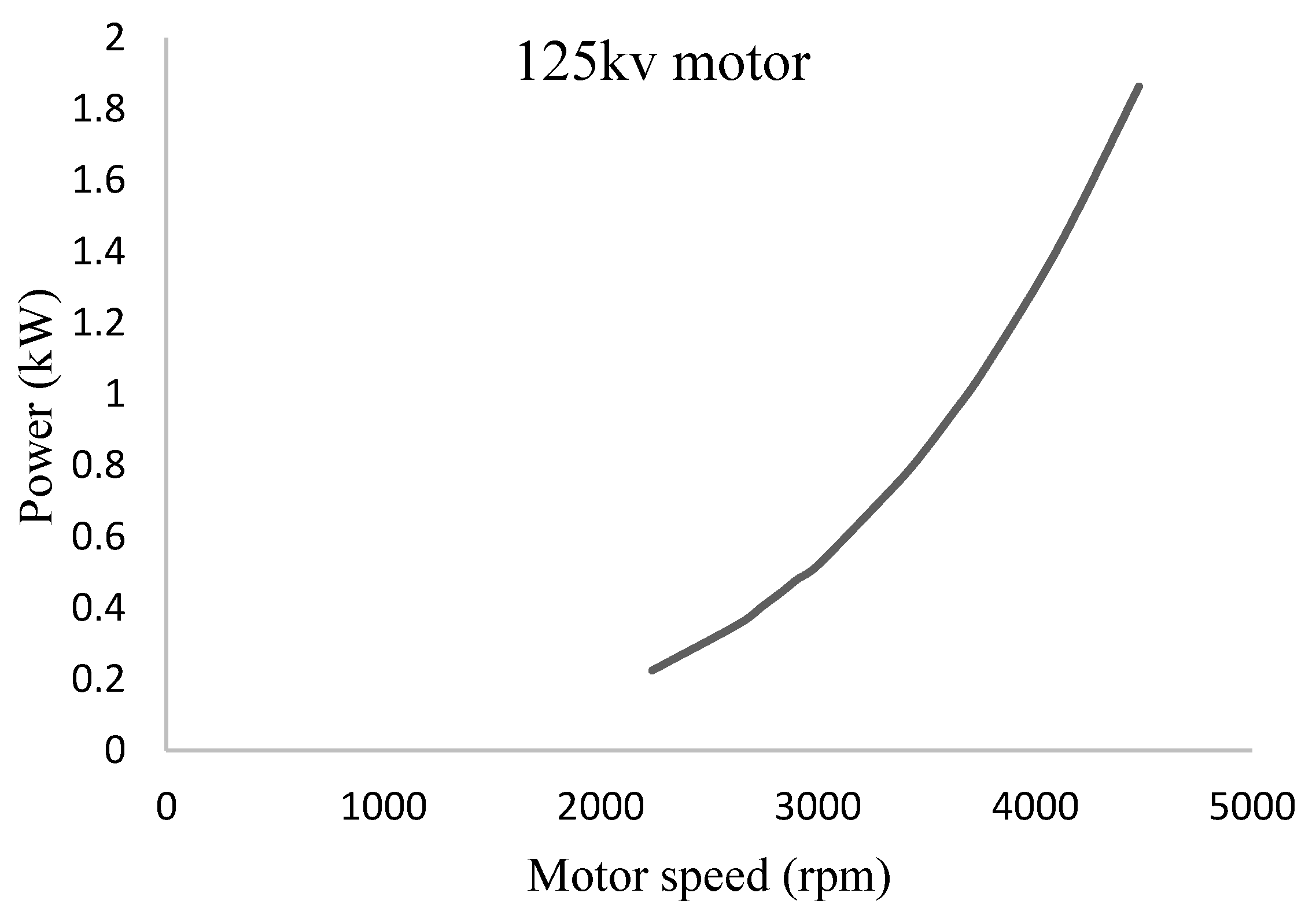
3.2.3. Selection of the Motor
3.2.4. Selection of the Battery
3.3. Weight Estimation
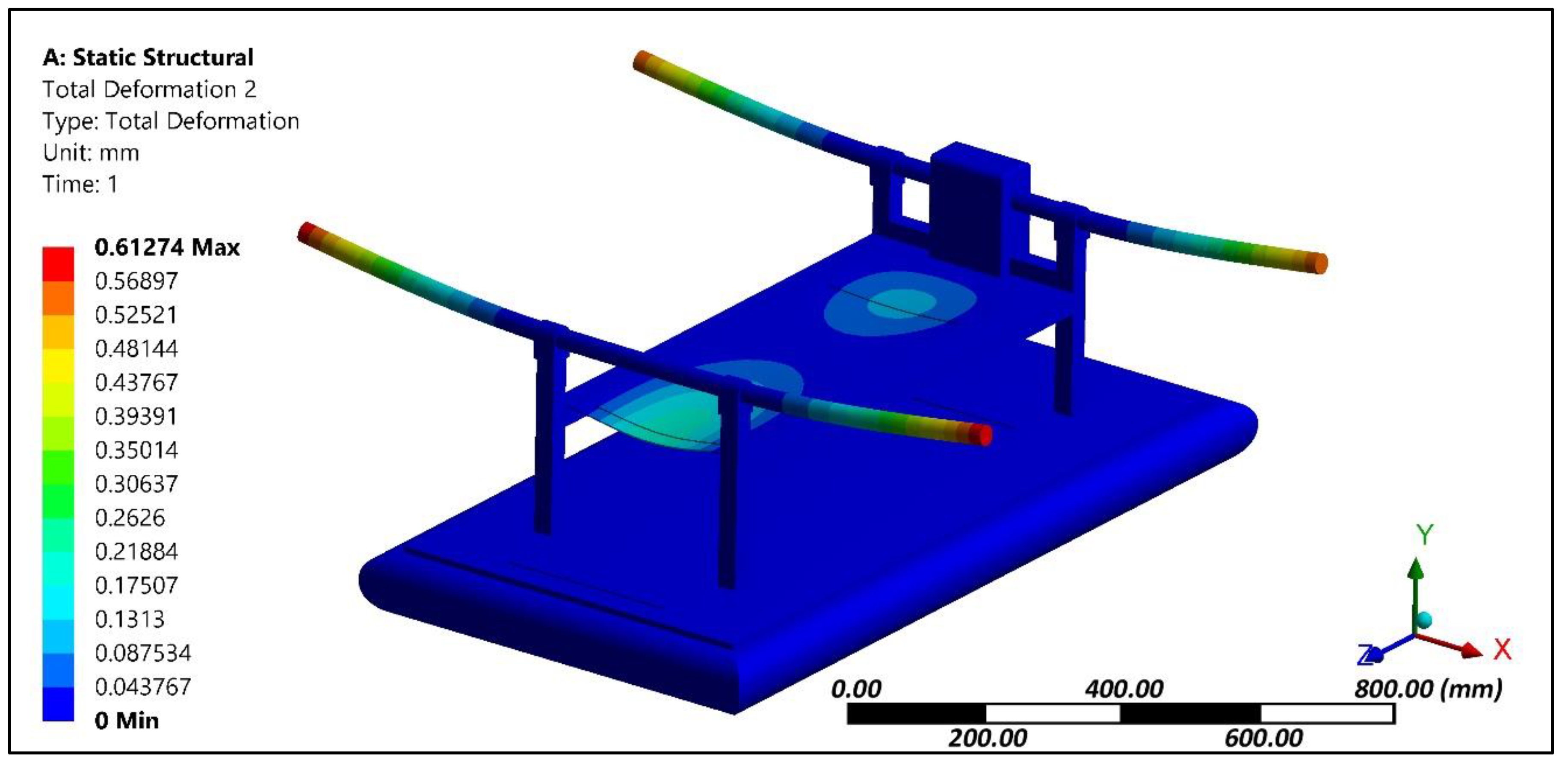
4. Structural Analysis of the Amphibious Vehicle
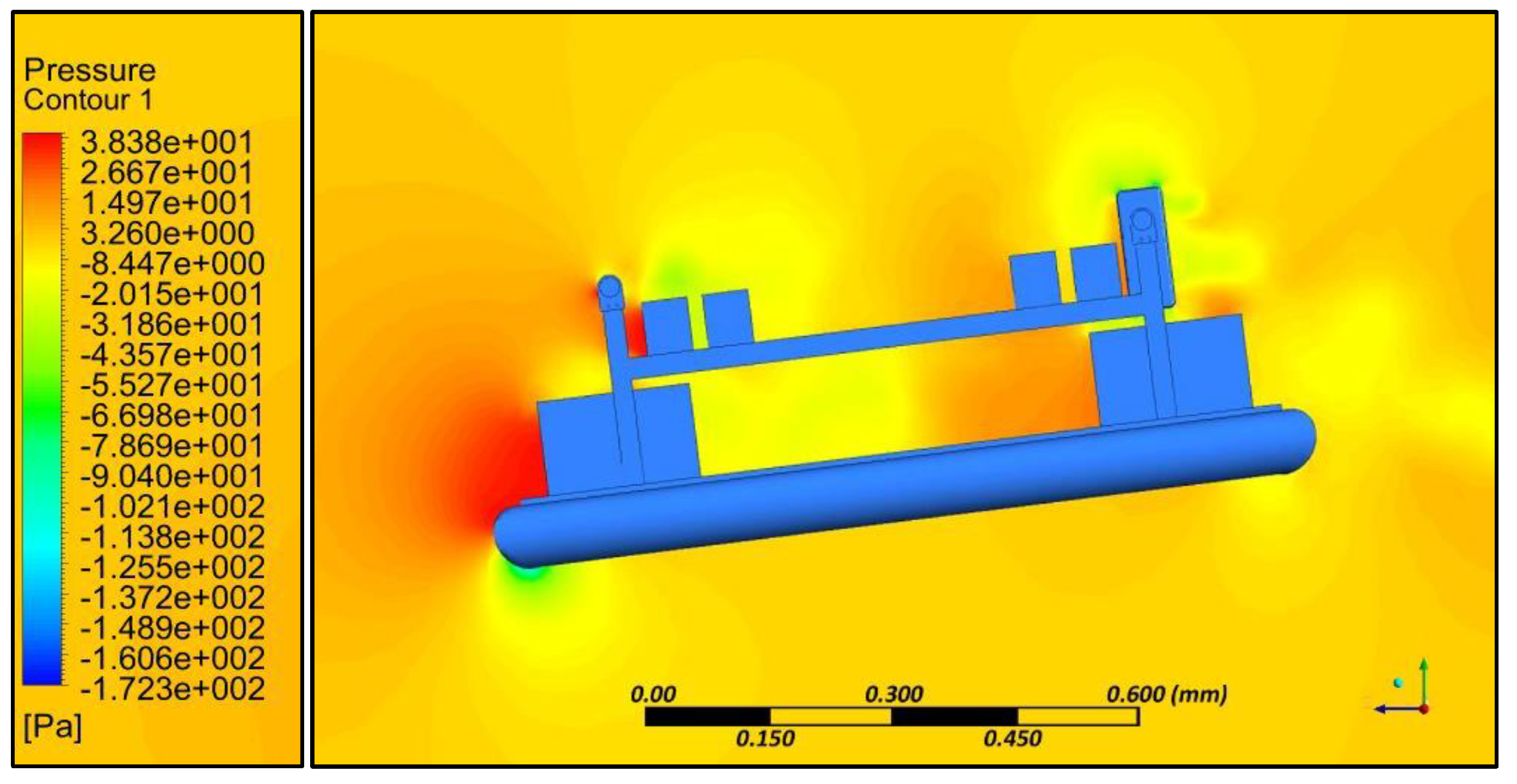
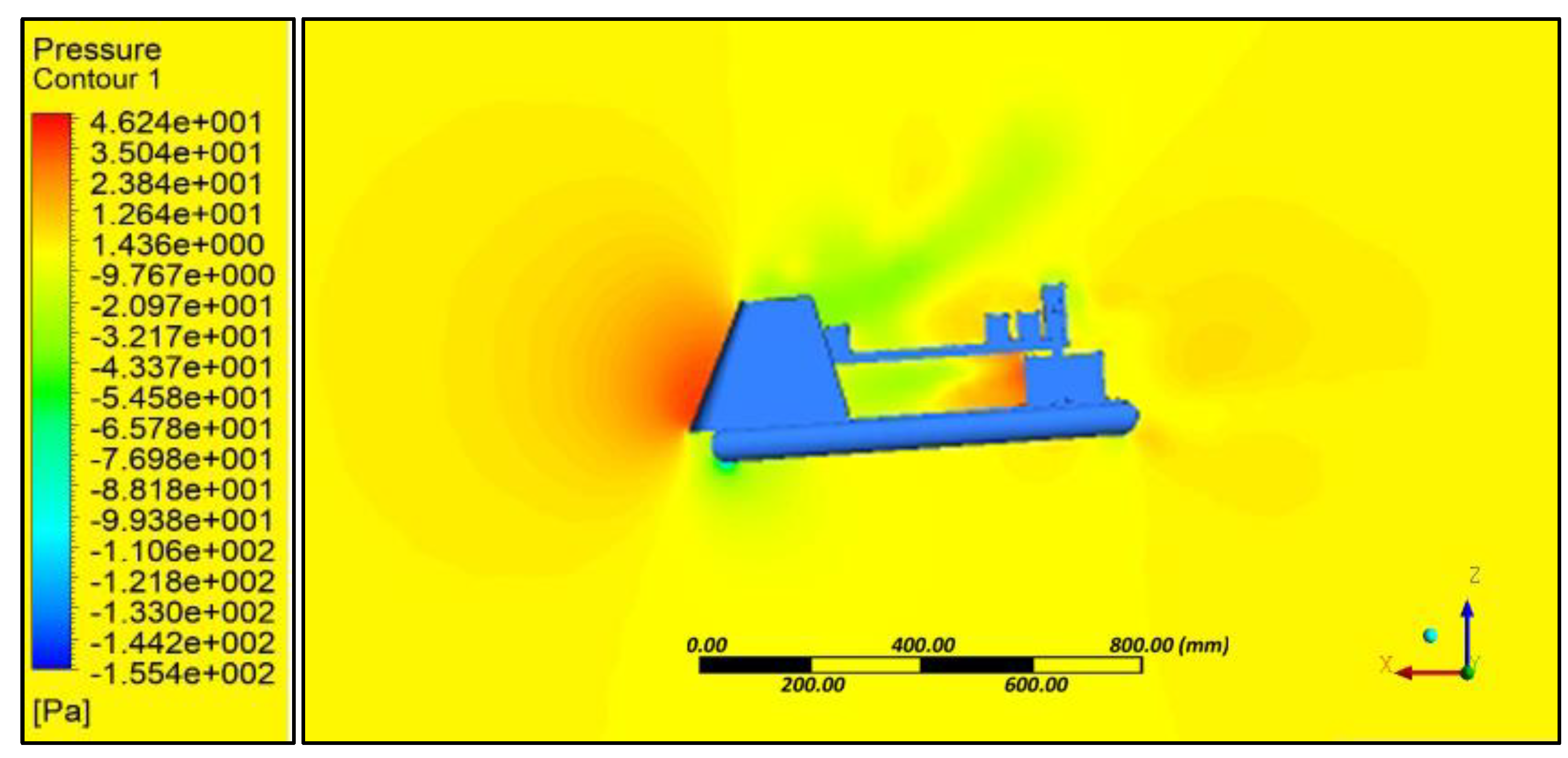
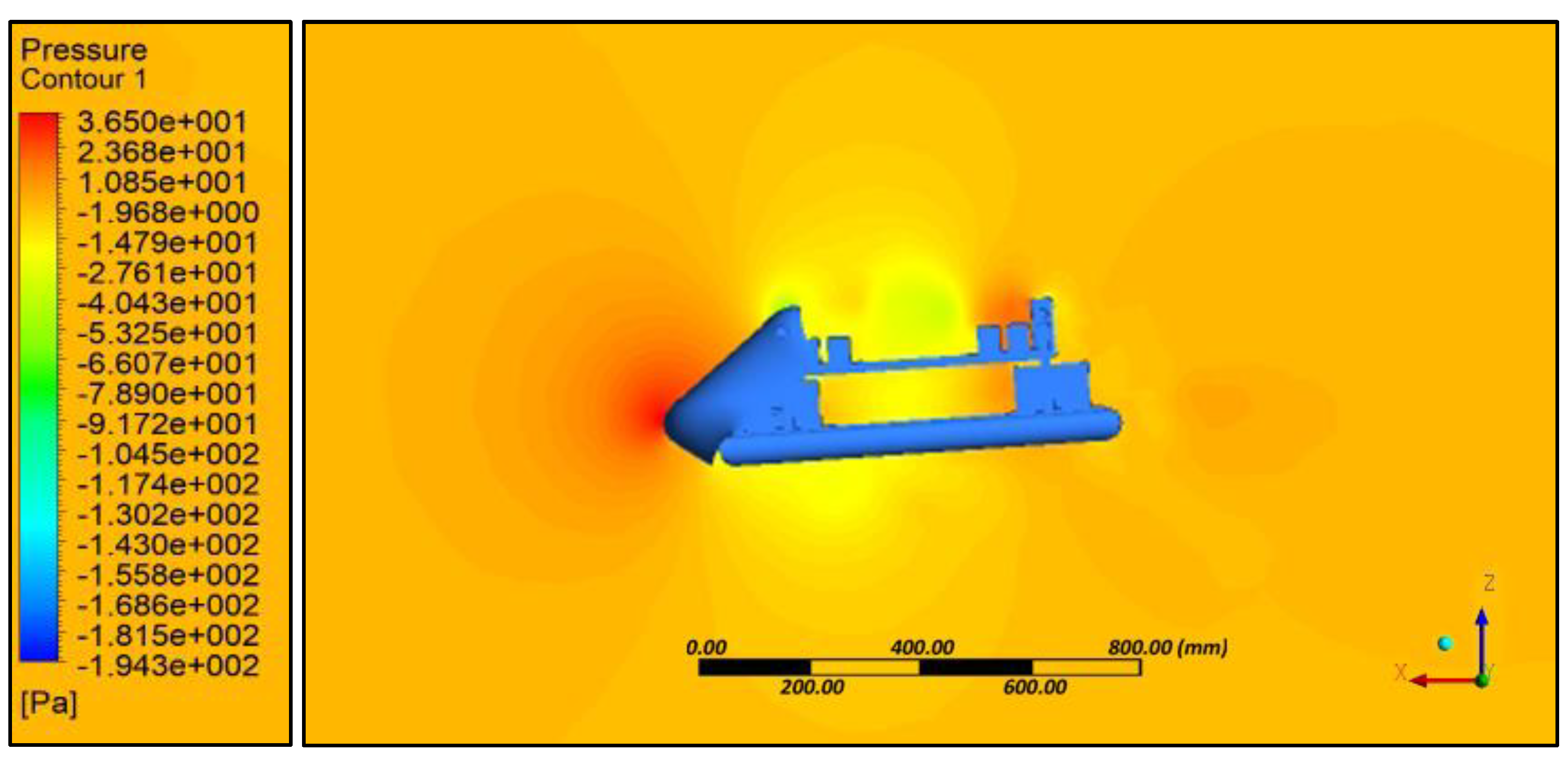
5. Aerodynamic Analysis
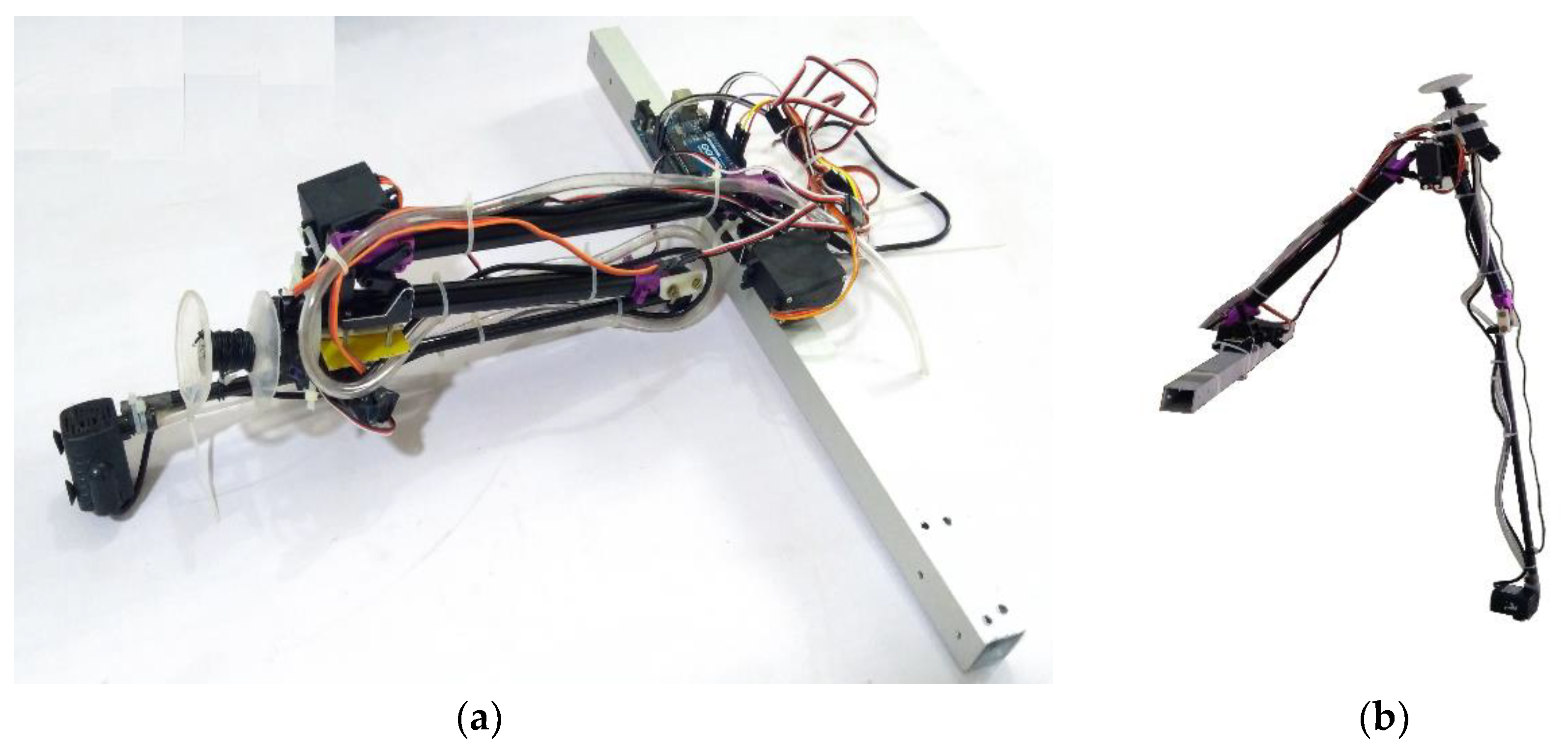
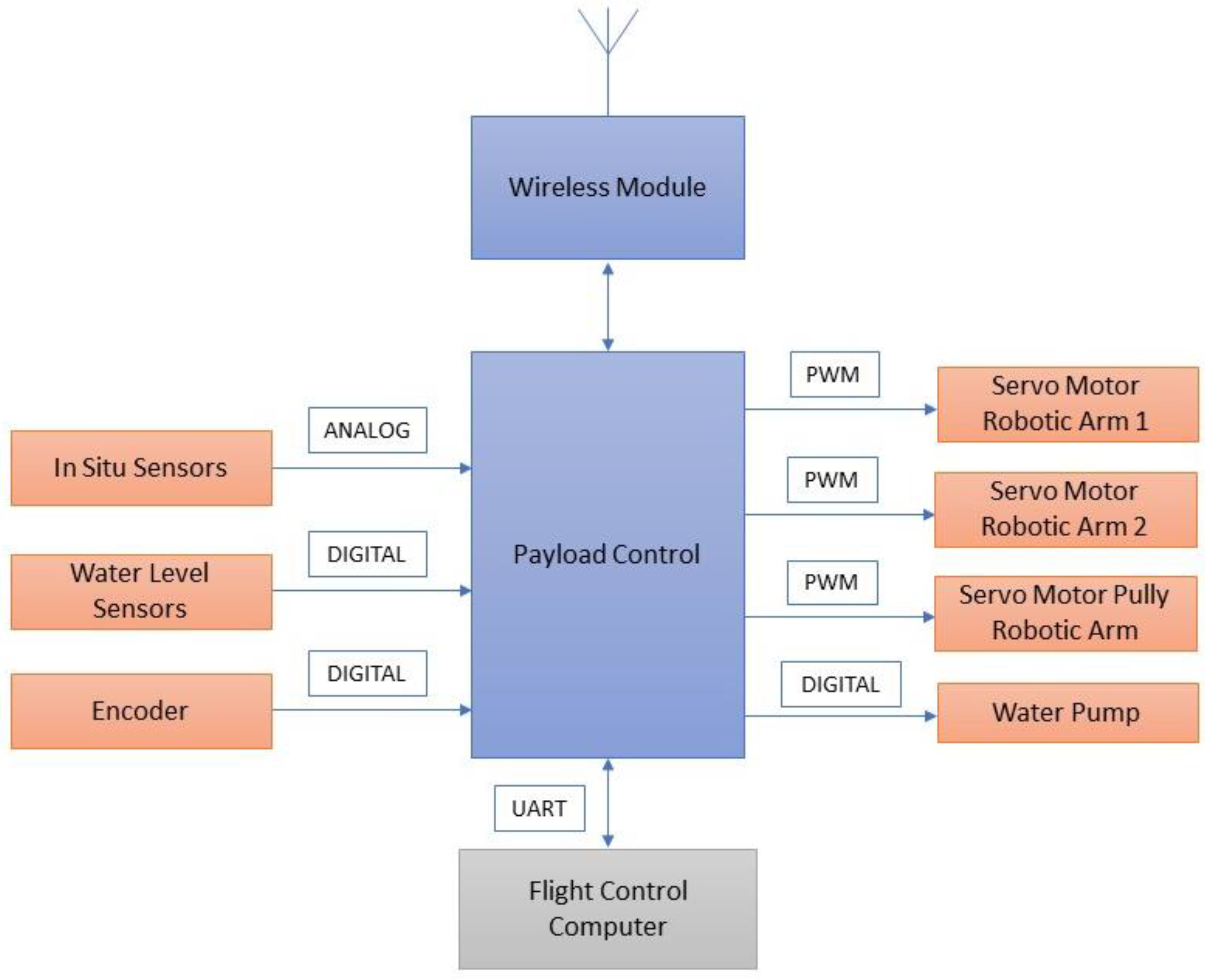
6. Water Sample Collection Using Robotic Arm
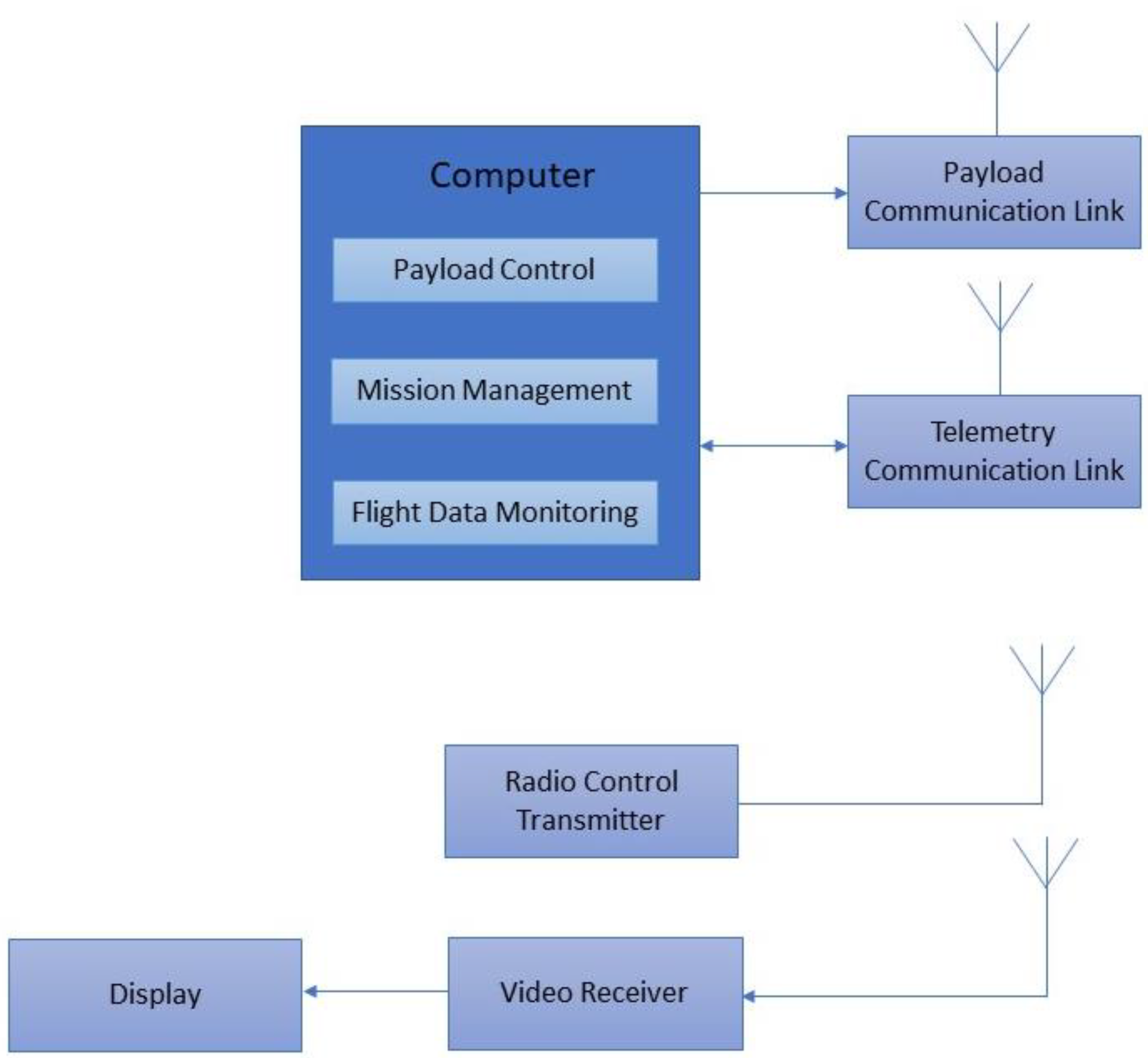
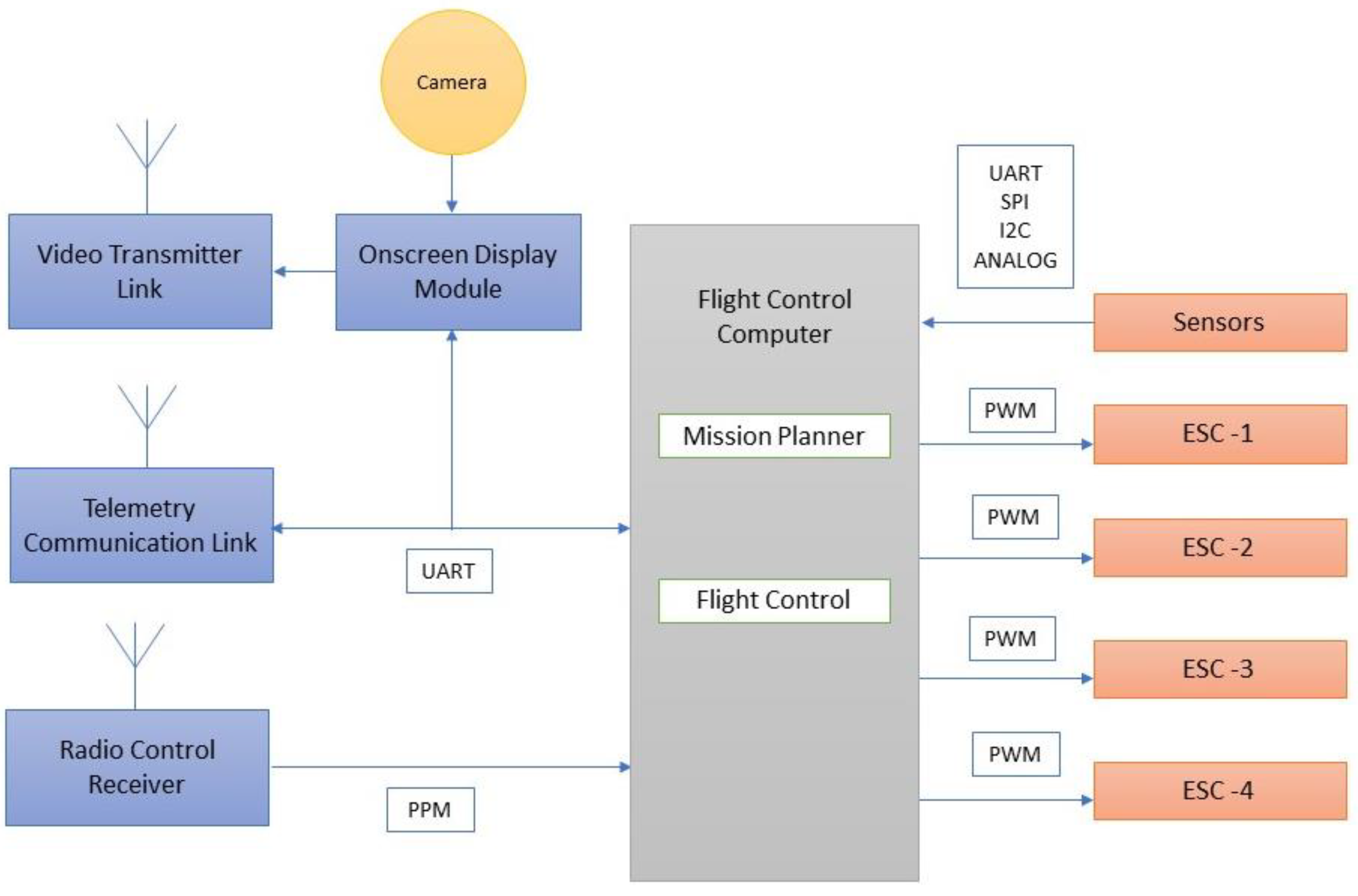
7. Development of Ground Control Station
8. Fabrication and Assembly of Amphibious Structure
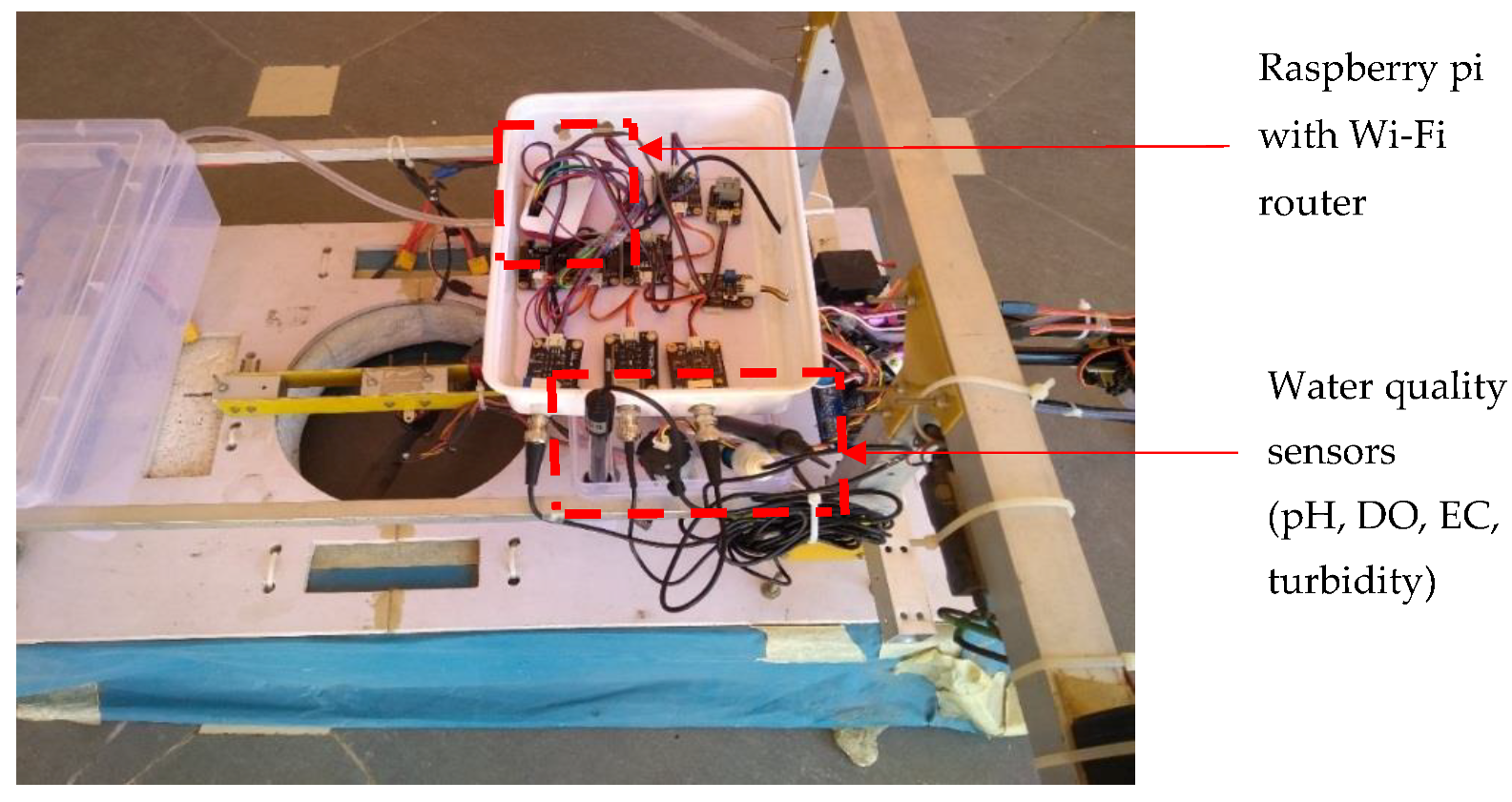
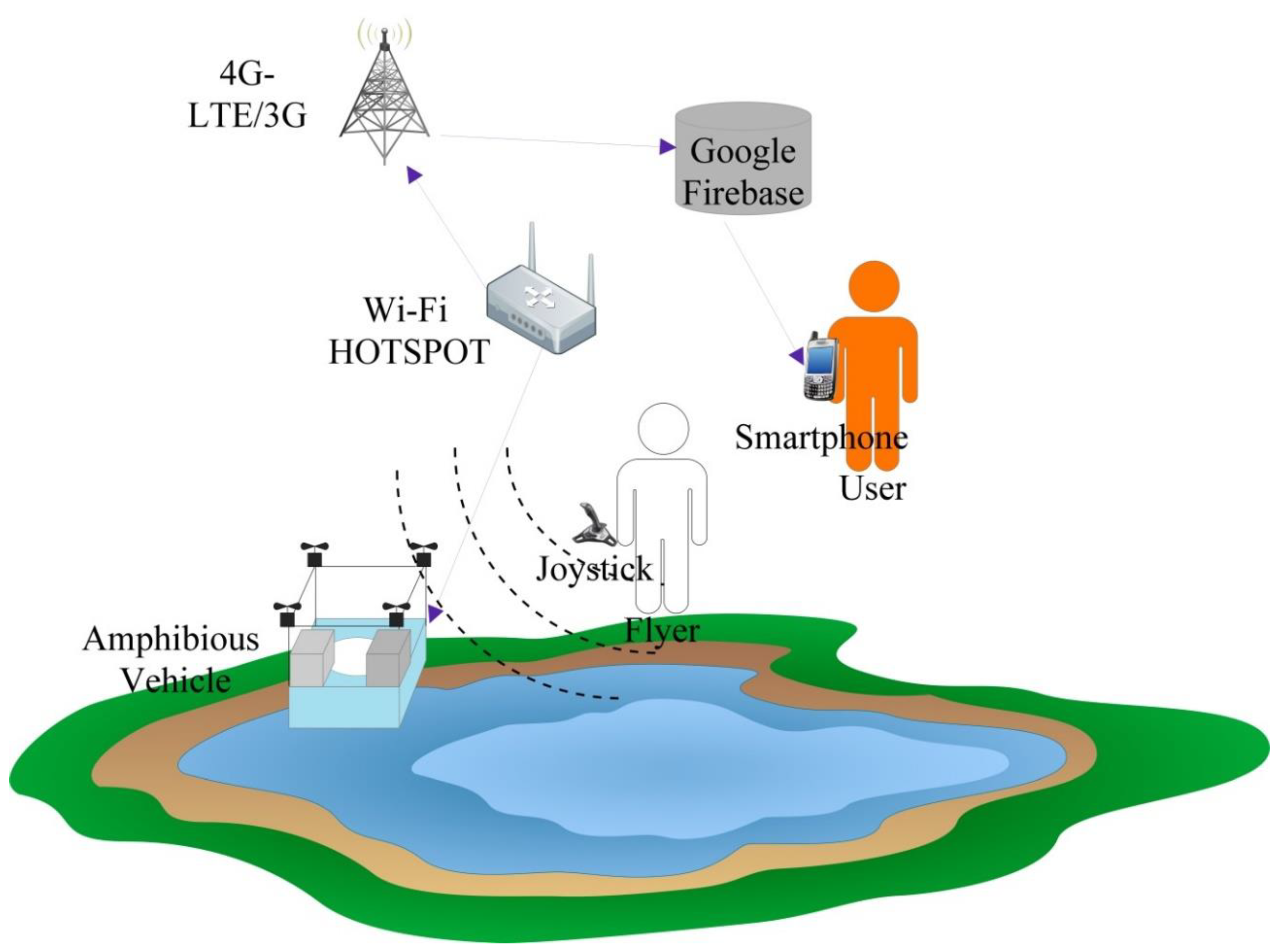
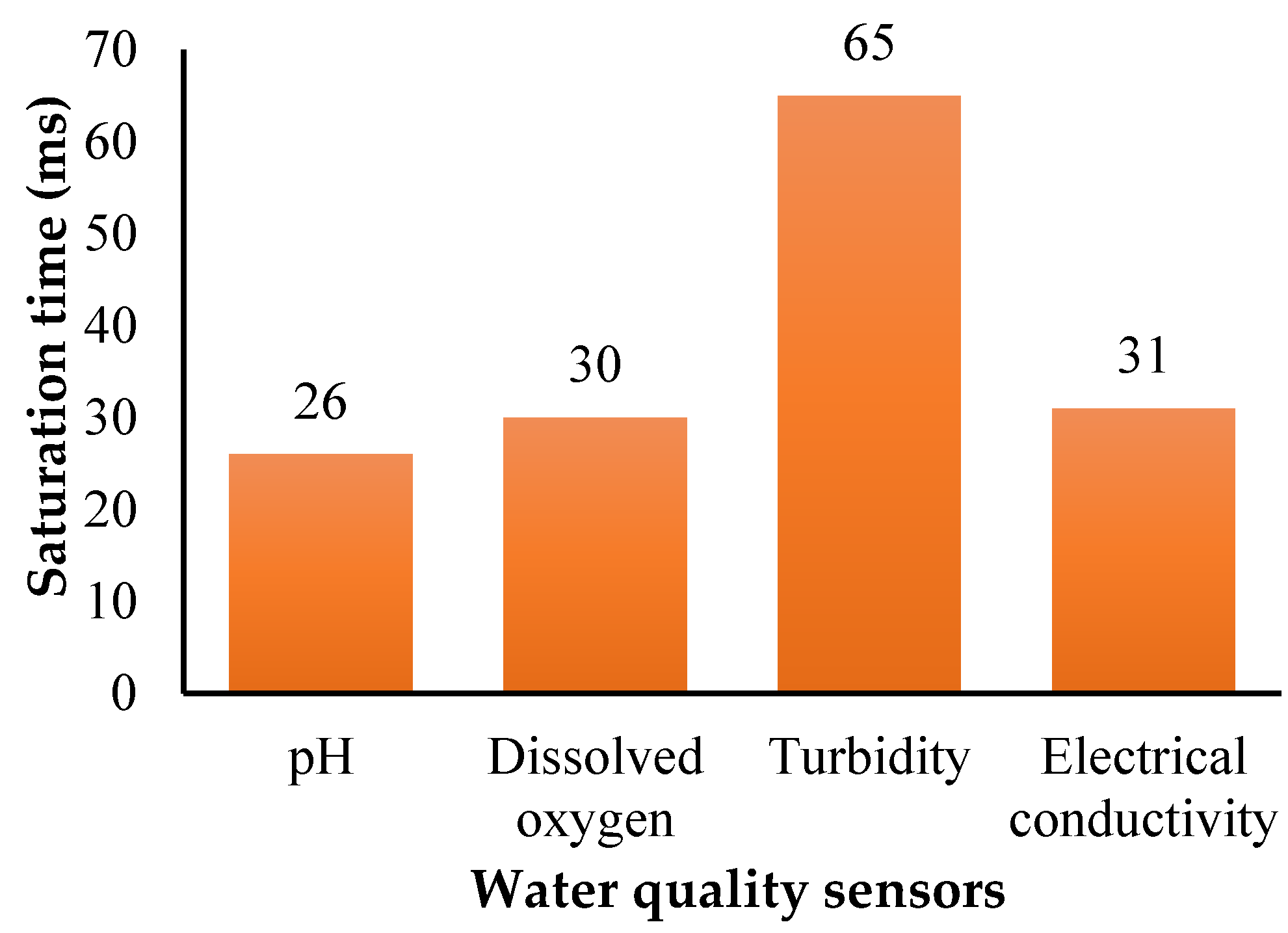
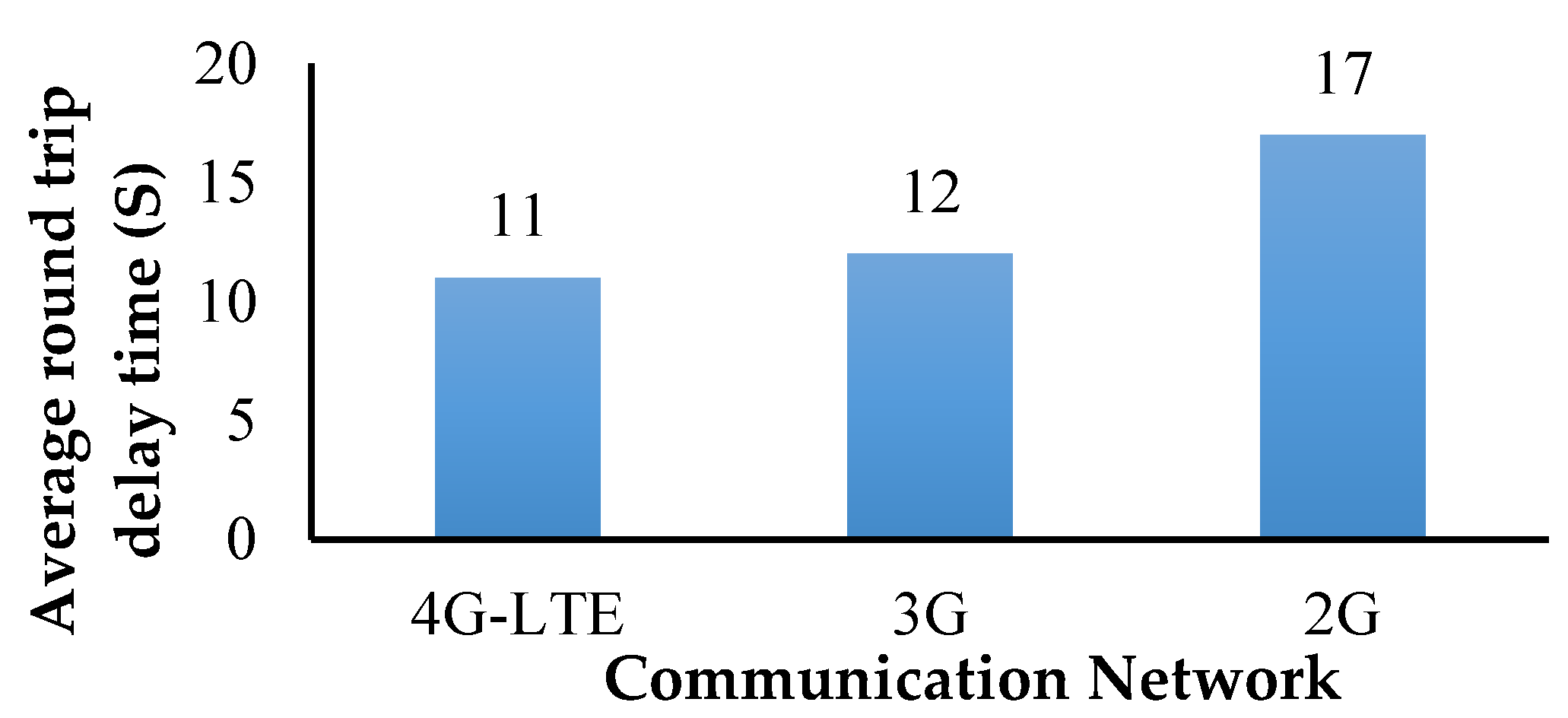
9. Internet of Things (IoT)-Based Water Quality Measurement
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Valavanis, K.P.; Vachtsevanos, G.J. Future of unmanned aviation. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2993–3009. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A.B. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Prakash, N.U.; Vasantharaj, R.; Balasubramanian, E.; Bhushan, G.; Das, S.; Eqbal, F. Design, development and analysis of air mycoflora using fixed wing unmanned aerial vehicle (UAV). J. Appl. Sci. Eng. 2014, 17, 1–8. [Google Scholar]
- Sankarasrinivasan, S.; Balasubramanian, E.; Karthik, K.; Chandrasekar, U.; Gupta, R. Health monitoring of civil structures with integrated UAV and image processing system. Procedia Comput. Sci. 2015, 54, 508–515. [Google Scholar] [CrossRef]
- Yang, L.J.; Esakki, B.; Chandrasekhar, U.; Hung, K.C.; Cheng, C.M. Practical flapping mechanisms for 20 cm-span micro air vehicles. Int. J. Micro Air Veh. 2015, 7, 181–202. [Google Scholar] [CrossRef]
- Udayagiri, C.; Kulkarni, M.; Esakki, B.; Pakiriswamy, S.; Yang, L.J. Experimental Studies on 3D Printed Parts for Rapid Prototyping of Micro Aerial Vehicles. J. Appl. Sci. Eng. 2016, 19, 17–22. [Google Scholar]
- Chandrasekhar, U.; Yang, L.J.; Esakki, B.; Suryanarayanan, S.; Salunkhe, S. Rapid prototyping of flapping mechanisms for monoplane and biplane ornithopter configurations. Int. J. Mod. Manuf. Technol. 2017, 9, 18–22. [Google Scholar]
- Collins, K.A. A Concept of Unmanned Aerial Vehicles in Amphibious Operations. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 1993. [Google Scholar]
- Boxerbaum, A.S.; Werk, P.; Quinn, R.D.; Vaidyanathan, R. Design of an autonomous amphibious robot for surf zone operation: Part I mechanical design for multi-mode mobility. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 1459–1464. [Google Scholar]
- Yayla, M.; Sarsilmaz, S.B.; Mutlu, T.; Cosgun, V.; Kurtulus, B.; Kurtulus, D.F.; Tekinalp, O. Dynamic Stability Flight Tests of Remote Sensing Measurement Capable Amphibious Unmanned Aerial Vehicle (A-UAV). In Proceedings of the 7th Ankara International Aerospace Conference AIAC, Ankara, Türkiye, 11–13 September 2013. [Google Scholar]
- Pisanich, G.; Morris, S. Fielding an amphibious UAV: Development, results, and lessons learned. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 2, p. 8C4. [Google Scholar]
- Hasnan, K.; Ab Wahab, A. First Design and Testing of an Unmanned Three-mode Vehicle. Int. J. Adv. Sci. Eng. Inf. Technol. 2012, 2, 13–20. [Google Scholar]
- Frejek, M.; Nokleby, S. Design of a small-scale autonomous amphibious vehicle. In Proceedings of the Canadian Conference on Electrical and Computer Engineering (CCECE 2008), Niagara Falls, ON, Canada, 4–7 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 781–786. [Google Scholar]
- Eaton, A.D.; Franson, M.A.H. Standard Methods for the Examination of Water & Wastewater; American Public Health Association: New York, NY, USA, 2005. [Google Scholar]
- Schaeffer, B.A.; Schaeffer, K.G.; Keith, D.; Lunetta, R.S.; Conmy, R.; Gould, R.W. Barriers to adopting satellite remote sensing for water quality management. Int. J. Remote Sens. 2013, 34, 7534–7544. [Google Scholar] [CrossRef]
- Gholizadeh, M.; Melesse, A.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [PubMed]
- Peters, C.B.; Zhan, Y.; Schwartz, M.W.; Godoy, L.; Ballard, H.L. Trusting land to volunteers: How and why land trusts involve volunteers in ecological monitoring. Biol. Conserv. 2017, 208, 48–54. [Google Scholar] [CrossRef]
- Tyler, A.N.; Hunter, P.D.; Carvalho, L.; Codd, G.A.; Elliott, J.A.; Ferguson, C.A.; Hanley, N.D.; Hopkins, D.W.; Maberly, S.C.; Mearns, K.J. Strategies for monitoring and managing mass populations of toxic cyanobacteria in recreational waters: A multi-interdisciplinary approach. Environ. Health 2009, 8, S11. [Google Scholar] [CrossRef] [PubMed]
- Karimanzira, D.; Jacobi, M.; Pfuetzenreuter, T.; Rauschenbach, T.; Eichhorn, M.; Taubert, R.; Ament, C. First testing of an UAV mission planning and guidance system for water quality monitoring and fish behaviour observation in net cage fish farming. Inf. Process. Agric. 2014, 1, 131–140. [Google Scholar]
- Amyot, J.R. (Ed.) Hovercraft Technology, Economics and Applications; Elsevier: Amsterdam, The Netherlands, 2013; Volume 11. [Google Scholar]
- Detweiler, C.; Griffin, B.; Roehr, H. Omni-directional hovercraft design as a foundation for MAV education. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 786–792. [Google Scholar]
- Schleigh, J. Construction of a Hovercraft Model and Control of Its Motion. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2006. [Google Scholar]
- Rashid, M.Z.A.; Aras, M.S.M.; Kassim, M.A.; Ibrahim, Z.; Jamali, A. Dynamic Mathematical Modeling and Simulation Study of Small Scale Autonomous Hovercraft. Int. J. Adv. Sci. Technol. 2012, 46, 95–114. [Google Scholar]
- Fuller, S.B.; Murray, R.M. A hovercraft robot that uses insect-inspired visual autocorrelation for motion control in a corridor. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO), Phuket, Thailand, 7–11 December 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1474–1481. [Google Scholar]
- Amiruddin, A.K.; Sapuan, S.M.; Jaafar, A.A. Development of a hovercraft prototype with an aluminium hull base. Int. J. Phys. Sci. 2011, 6, 4185–4194. [Google Scholar]
- Koko, M.I.A.A. Design of a Typical Multi-Role Vehicle Using Quad-Rotor Theory. Ph.D. Thesis, Sudan University of Science and Technology, Khartoum, Sudan, 2014. [Google Scholar]
- Estimation of Propeller Static Thrust. Available online: https://rcplanes.online (accessed on 1 July 2018).
- T-Motors. Available online: http://store-en.tmotor.com (accessed on 1 July 2018).
- Haider, A.; Sajjad, M. Structural design and non-linear modeling of a highly stable multi-rotor hovercraft. Control Theory Inform. 2012, 2, 24–35. [Google Scholar]
- Weerasinghe, R.; Monasor, M. Simulation and experimental analysis of hovering and flight of a quadrotor. In Proceedings of the HEFAT 2017, Portorož, Slovenia, 17–19 July 2017. [Google Scholar]
- Kuantama, E.; Craciun, D.; Tarca, R. Quadcopter Body Frame Model and Analysis. Ann. Univ. Oradea 2016, 71–74. [Google Scholar] [CrossRef]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Inalhan, G. Design of a commercial hybrid VTOL UAV system. J. Intell. Robot. Syst. 2014, 74, 371–393. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial No. | Empirical Relation | Limit |
|---|---|---|
| 1 | Length to width (l/w) | 2 |
| 2 | Bag pressure to cushion pressure (Pb/Pc) | 1.3 |
| 3 | Forward thrust to overall weight during hovering (Tf/W) | 0.2 |
| 4 | Propeller pitch to diameter (p/d) | 0.6 |
| 5 | Vertical thrust to maximum take-off weight (Tv/W) | 2 |
| Parameter | Empirical Relation | Values |
|---|---|---|
| Maximum take-off weight (W) | 269.78 N | |
| Length of the hovercraft (l) | ||
| Cushion Area (Ac) | ||
| Cushion pressure (Pc) | 674.44 N/m2 | |
| Air escaping velocity (Ve) | 33.18 m/s | |
| Air escaping area (Ae) | 0.038 m2 | |
| Air flow rate (Qe) | m3/s | |
| Power required (Pe) | 852.32 W |
| Property | Nylon Impregnated with Urethane | Natural Rubber-Coated Nylon | Vinyl-Coated 1000 Denier Polyester |
|---|---|---|---|
| Tensile strength (MPa) | 45 | 35 | 3.06 |
| Elastic modulus (MPa) | 1.48 | 1.10 | 20.00 |
| Density (kg/m3) | 900 | 1016 | 1500 |
| Hardness | 75 | 34 | 87 |
| Flexural strength (MPa) | 41 | 20 | 26 |
| Property | Composite Material | Fiberglass | Polyurethane Foam |
|---|---|---|---|
| Tensile strength (MPa) | 1200 | 1950 | 1900 |
| Compressive strength (MPa) | 866 | 4000 | 48 |
| Elastic modulus (GPa) | 45 | 72 | 4 |
| Density (kg/m3) | 7850 | 2540 | 1390 |
| Flexural strength (MPa) | 146 | 110 | 57 |
| Parameters | Empirical Relation | Values |
|---|---|---|
| Required motor speed (N) | 4200 rpm | |
| Thrust per motor (T) | 92 N | |
| Lift required for the multicopter (Lm) | 540 N |
| Parameters | Empirical Relation | Values |
|---|---|---|
| Speed of motor (N) | rpm | |
| Operating current (I) | ||
| Number of battery cells (nS) | ||
| Endurance (E) | mAh × 0.001 × 60/Σ Im | 25 min |
| Sl. No | Component Name | Power Required (W) | Current Consumption (A) |
|---|---|---|---|
| 1 | Flight controller board | 16 | 0.34 |
| 2 | ESC | 40 | 0.83 |
| 3 | Video telemetry | 15 | 0.34 |
| 4 | Camera | 10 | 0.21 |
| 5 | On-board processor | 50 | 1.01 |
| Total | 131 | 2.73 | |
| Sl. No | Components | Power (W) | Total Power Consumption (W) | Total Current Consumption (A) |
|---|---|---|---|---|
| 1 | Electronics components | 95.30 | 95.30 | 2.73 |
| 2 | Motors | 460.80 (per motor) | 3686.40 (for eight motors) | 76.40 (for eight motors) |
| Total | 3781.70 | 79.13 | ||
| Sl. No | Components | Power (W) | Total Power Consumption (W) | Total Current Consumption (A) |
|---|---|---|---|---|
| 1 | Electronics components | 95.30 | 95.30 | 2.73 |
| 2 | Motors | 240.00 (per motor) | 1920.00 (for four motors) | 40.00 (for four motors) |
| 3 | Ducted Motor | 100.00 (per motor) | 100.00 (for one motor) | 2.08 (for one motor) |
| Total | 2115.30 | 44.81 | ||
| Sl. No. | Components | Weight (kg) |
|---|---|---|
| 1 | Multicopter frames (aluminum alloy 6061) | 1.40 |
| 2 | Hull (Polyurethane foam) | 0.80 |
| 3 | Skirt (Nylon impregnated with urethane) | 1.70 |
| 4 | Control system | 0.45 |
| 5 | Multicopter motor | 3.36 |
| 6 | Multicopter propeller | 0.31 |
| 7 | Multicopter electronic speed controller (ESC) | 0.88 |
| 8 | Servo | 0.50 |
| 9 | Electronic duct fan (EDF) | 0.40 |
| 10 | EDF ESC | 0.11 |
| 11 | Li-Po batteries | 10.00 |
| 12 | Miscellaneous | 0.40 |
| 13 | Payload | 7.00 |
| Total Weight | 27.31 | |
| α Angle of Attack | Cd Drag Coefficient | D Drag (N) |
|---|---|---|
| 0° | 5.89 | 38.3 |
| 4° | 5.65 | 36.8 |
| 8° | 5.50 | 35.8 |
| Serial No. | Sensors | Locations | Maximum Allowable Limit | ||||
|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | |||
| 1 | pH | 8.12 | 7.98 | 7.83 | 8.00 | 7.01 | (acceptable range = 6.5 to 8.5) >7.0 + = alkalinity <7.0 − = acidity |
| 2 | Turbidity (NTU) | 8.47 | 8.04 | 8.01 | 8.94 | 8.85 | 5.0 |
| 3 | Electric conductivity (ms/cm) | 1.31 | 1.31 | 1.34 | 1.37 | 1.34 | 0–0.5 mS/cm Good 0.5–1.5 mS/cm Normal >1.5 mS/cm High |
| 4 | Dissolved oxygen (mg/L) | 8.75 | 8.75 | 9.04 | 8.82 | 8.61 | Above 6 mg/L |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. https://doi.org/10.3390/s18103318
Esakki B, Ganesan S, Mathiyazhagan S, Ramasubramanian K, Gnanasekaran B, Son B, Park SW, Choi JS. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors. 2018; 18(10):3318. https://doi.org/10.3390/s18103318
Chicago/Turabian StyleEsakki, Balasubramanian, Surendar Ganesan, Silambarasan Mathiyazhagan, Kanagachidambaresan Ramasubramanian, Bhuvaneshwaran Gnanasekaran, Byungrak Son, Su Woo Park, and Jae Sung Choi. 2018. "Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things" Sensors 18, no. 10: 3318. https://doi.org/10.3390/s18103318