Fiber Optic Thermo-Hygrometers for Soil Moisture Monitoring

 and
and
Abstract
:1. Introduction
2. Preliminary Test Exploiting the First Version of VWC Sensor
2.1. Soil Moisture Sensor Based on a FBG Thermo-Hygrometer
2.2. Sample Soil Preparation and Experimental Setup
- Soil drying: Before starting each test, the soil is heated and dried in an oven at a temperature >105 °C for 24 h, so as to obtain a sample of dried soil water (VWC = 0%);
- Soil preparation: Given quantities of dried soil and water are poured into a container in order to obtain a sample soil having the desired value of VWC;
- Sample homogenization: Prepared samples are mixed meticulously, to make the amount of added water to distribute evenly throughout the sample;
- Verification of VWC value: The TDR reference sensor is used to verify the VWC value of prepared sample, as well as its homogeneity;
- Sensor insertion in the soil: The sensor is inserted into the soil at a depth of 5 cm (the total height of soil in the container is 10 cm);
- Container insulation: Throughout the whole test duration, the container is covered with plastic paraffin film (parafilm) to prevent water evo-transpiration phenomena that could even slightly modify the VCW values.
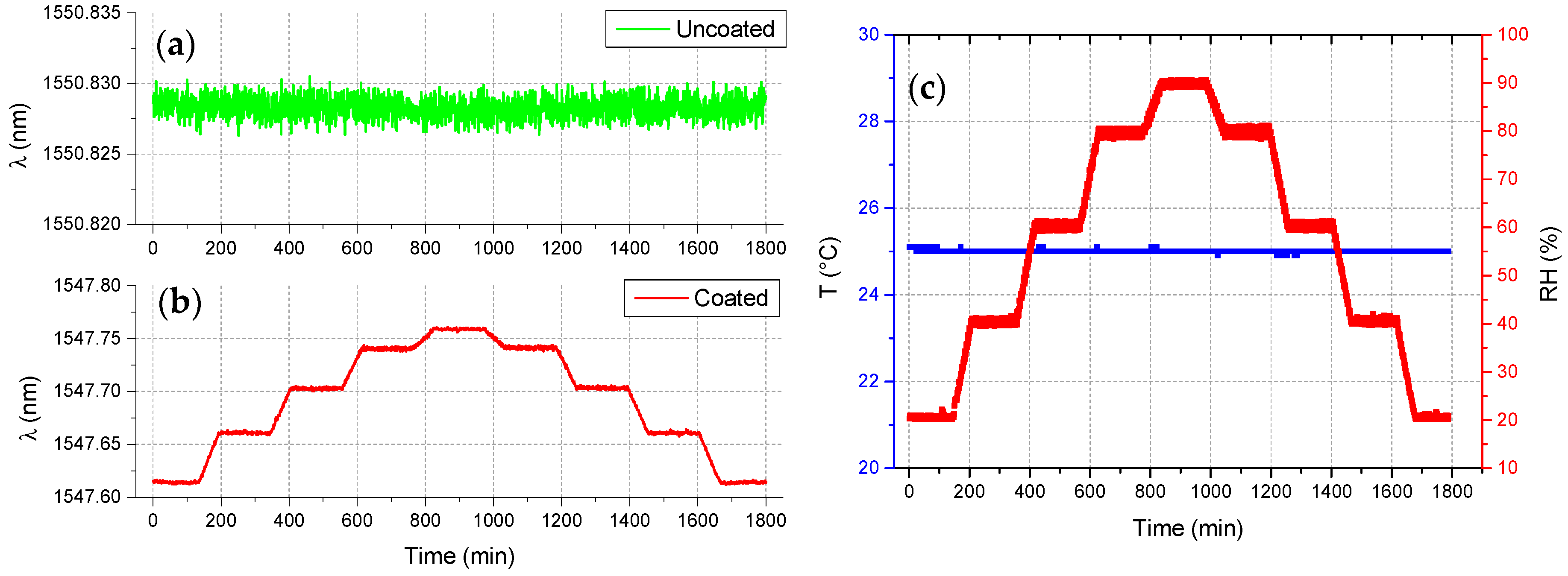
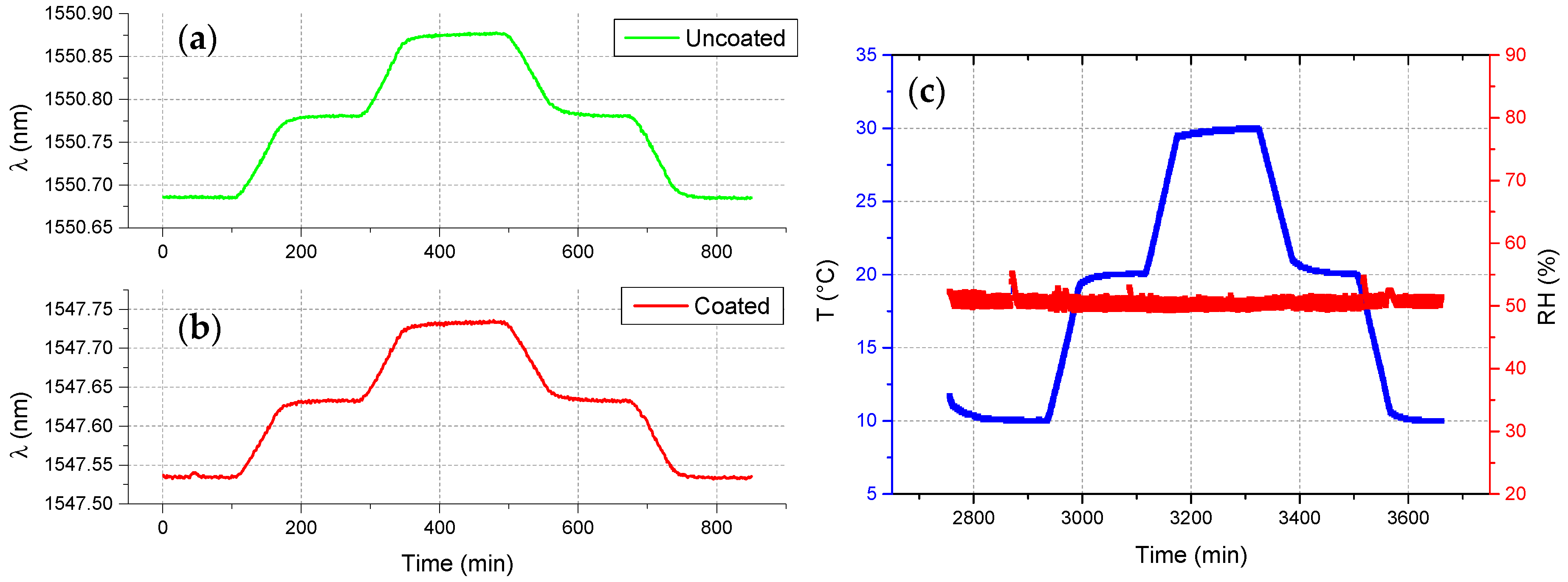
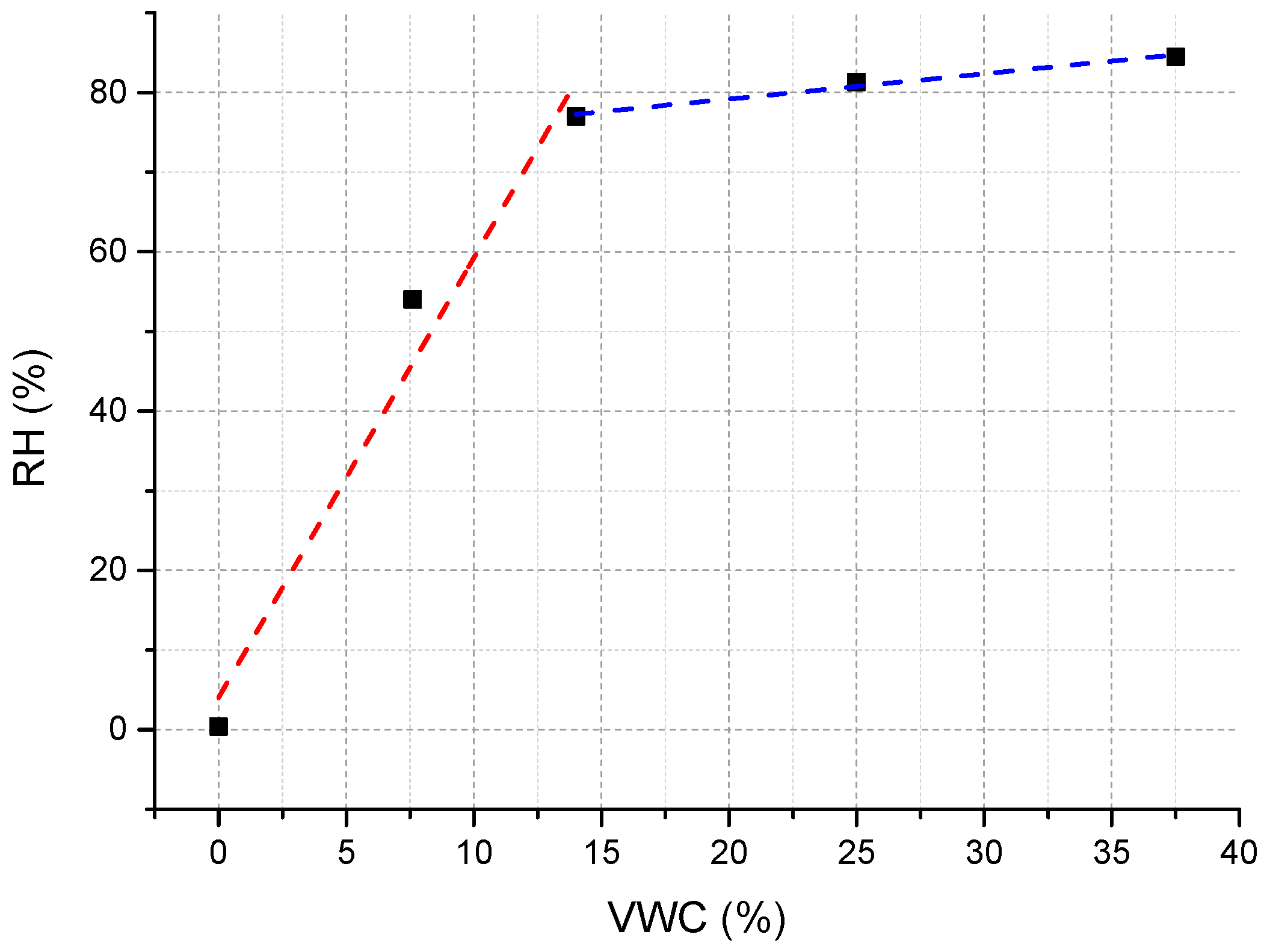
2.3. Experimental Results
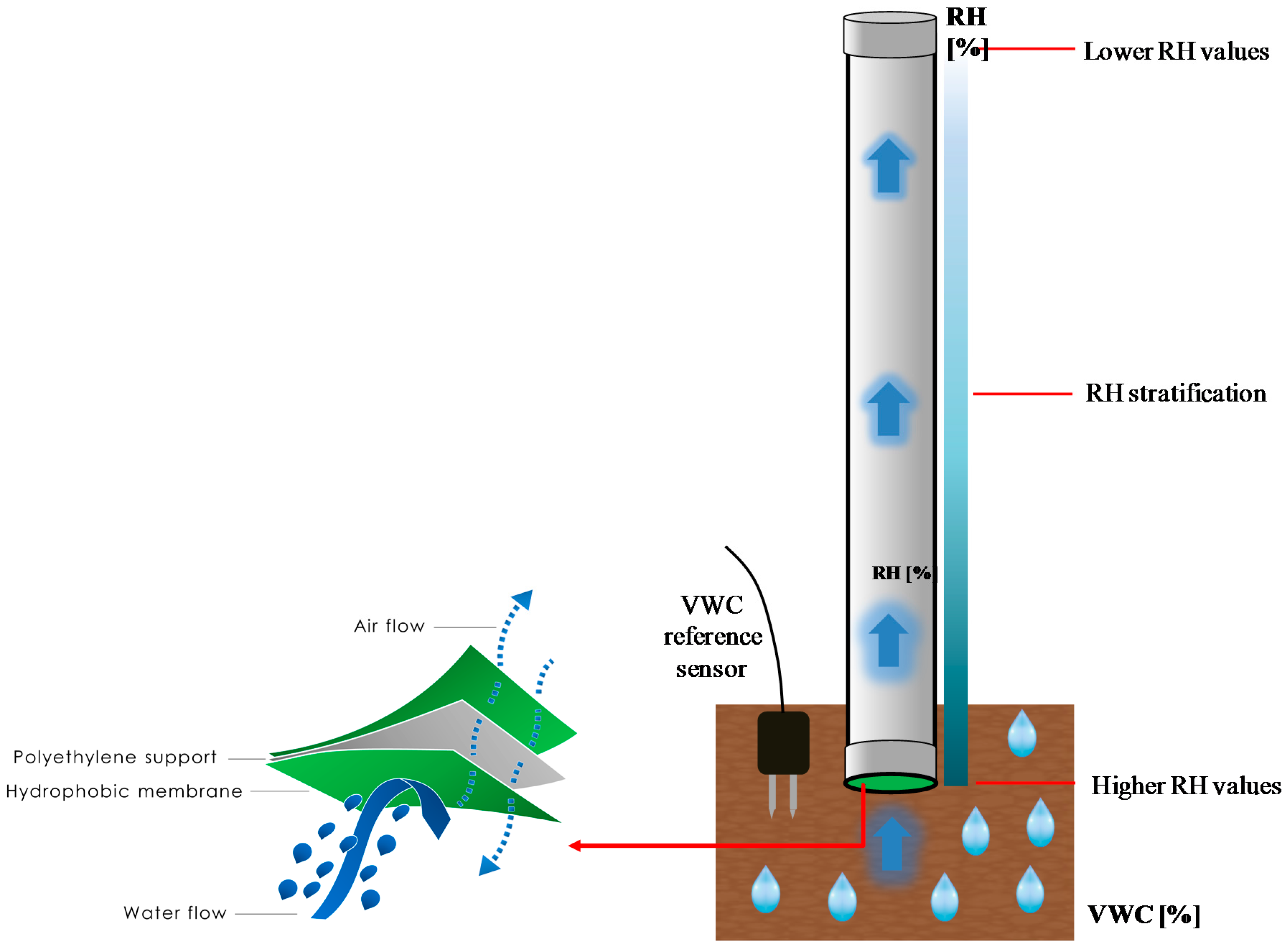
3. Soil Moisture Sensor Optimization
- H1: the thermo-hygrometer is placed at 4 cm from the exchange surface;
- H2: the thermo-hygrometer is placed at 9 cm from the exchange surface;
- H3: the thermo-hygrometer is placed at 14 cm from the exchange surface;
3.1. Fabrication of the Optimized Version of Soil Moisture Sensor
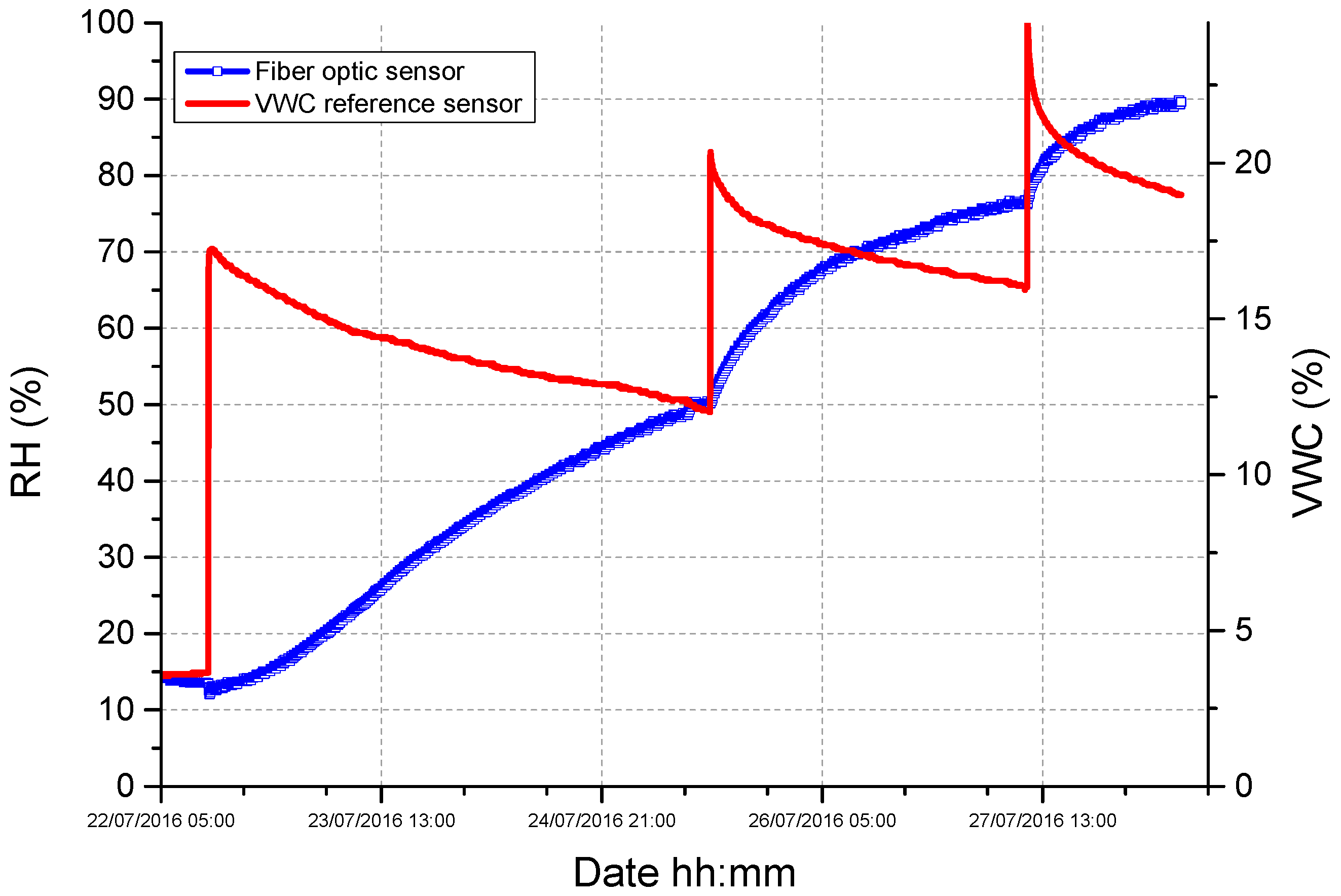
3.2. Calibration of the Optimized Version of Soil Moisture Sensor
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, J.; Ju, N.P.; Liao, Y.J.; Liu, D.D. Determination of rainfall thresholds for shallow landslides by a probabilistic and empirical method. Nat. Hazards Earth Syst. Sci. 2015, 15, 2715–2723. [Google Scholar] [CrossRef]
- ISPRA. Dissesto Idrogeologico in Italia: Pericolosità e Indicatori di Rischio—Rapporto 2015; ISPRA: Roma, Italia, 2015. Available online: http://www.isprambiente.gov.it/it/pubblicazioni/rapporti/dissesto-idrogeologico-in-italia-pericolosita-e-indicatori-di-rischio-rapporto-2015 (accessed on 10 January 2017).
- Baum, R.L.; Godt, J.W. Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 2010, 7, 259–272. [Google Scholar] [CrossRef]
- Chae, B.-G.; Kim, M.-I. Suggestion of a method for landslide early warning using the change in the volumetric water content gradient due to rainfall infiltration. Environ. Earth Sci. 2012, 66, 1973–1986. [Google Scholar] [CrossRef]
- Keefer, D.K.; Wilson, R.C.; Mark, R.K.; Brabb, E.E.; Brown, W.M., 3rd; Ellen, S.D.; Harp, E.L.; Wieczorek, G.F.; Alger, C.S.; Zatkin, R.S. Real-time landslide warning during heavy rainfall. Science 1987, 238, 921–925. [Google Scholar] [CrossRef] [PubMed]
- Apip; Takara, K.; Yamashiki, Y.; Sassa, K.; Ibrahim, A.B.; Fukuoka, H. A distributed hydrological-geotechnical model using satellite-derived rainfall estimates for shallow landslide prediction system at a catchment scale. Landslides 2010, 7, 237–258. [Google Scholar] [CrossRef]
- Montgomery, R.D.; Schmidt, K.M.; Greenberg, H.M.; Dietrich, W.E. Forest clearing and regional landsliding. Geology 2000, 28, 311–314. [Google Scholar] [CrossRef]
- Campbell, R.H. Soil Slips, Debris Flows, and Rainstorms in the Santa Monica Mountains and Vicinity, Southern California; No. 851; U.S. Department of the Interior, U.S. Government Printing Office: Washington, DC, USA, 1975.
- Caine, N. The rainfall intensity: Duration control of shallow landslides and debris flows. Geogr. Ann. Ser. A Phys. Geogr. 1980, 62, 23–27. [Google Scholar] [CrossRef]
- Brand, E.; Premchitt, J.; Phillipson, H. Relationship between rainfall and landslides in Hong Kong. In Proceedings of the 4th International Symposium on Landslides, Toronto, ON, Canada, 16–21 September 1984; BiTech Publishers: Vancouver, BC, Canada, 1984; pp. 377–384. [Google Scholar]
- Larsen, M.C.; Simon, A. A rainfall intensity-duration threshold for landslides in a humid-tropical environment, Puerto Rico. Geogr. Ann. Ser. A Phys. Geogr. 1993, 75A, 13–23. [Google Scholar] [CrossRef]
- Marchi, L.; Arattano, M.; Deganutti, A.M. Ten years of debris-flow monitoring in the Moscardo Torrent (Italian Alps). Geomorphology 2002, 46, 1–17. [Google Scholar] [CrossRef]
- Aleotti, P. A warning system for rainfall-induced shallow failures. Eng. Geol. 2004, 73, 247–265. [Google Scholar] [CrossRef]
- Guzzetti, F.; Peruccacci, S.; Rossi, M.; Stark, C.P. Rainfall thresholds for the initiation of landslides in central and southern Europe. Meteorol. Atmos. Phys. 2007, 98, 239–267. [Google Scholar] [CrossRef]
- Montgomery, D.R.; William, E.D. A physically based model for the topographic control on shallow landsliding. Water Resour. Res. 1994, 30, 1153–1171. [Google Scholar] [CrossRef]
- Iverson, R. Landslide triggering by rain infiltration. Water Resour. Res. 2000, 36, 1897–1910. [Google Scholar] [CrossRef]
- Crosta, G. Regionalization of rainfall thresholds: An aid to landslide hazard evaluation. Environ. Geol. 1998, 35, 131–145. [Google Scholar] [CrossRef]
- Chae, B.-G.; Choi, J.; Seo, Y.-S. Suggestion of a landslide early warning method using a gradient of volumetric water content. In Landslide Science for a Safer Geo Environment; Springer: Cham, Switzerland, 2014; pp. 545–550. [Google Scholar]
- Sassa, K.; Canuti, P.; Yin, Y. (Eds.) Landslide Science for a Safer Geoenvironment: Volume 1: The International Programme on Landslides (IPL); Springer: Cham, Switzerland, 2014. [Google Scholar]
- Crosta, G.B.; Frattini, P. Distributed modelling of shallow landslides triggered by intense rainfall. Nat. Hazards Earth Syst. Sci. 2003, 3, 81–93. [Google Scholar] [CrossRef]
- Ferraz, E.S.B.; Mansell, R.S. Determining Water Content and Bulk Density of Soil by Gamma Ray Attenuation Methods; Technical Bulletin 807; Institute of Food and Agricultural Sciences, University of Florida: Gainesville, FL, USA, 1979. [Google Scholar]
- Priestley, C.H.B.; Taylor, R.J. On the assessment of surface heat flux and evaporation using large-scale parameters. Mon. Weather Rev. 1972, 100, 81–92. [Google Scholar] [CrossRef]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Chambers, J.E.; Gunn, D.A.; Wilkinson, P.B.; Meldrum, P.I.; Haslam, E.; Holyoake, S.; Wragg, J. 4D electrical resistivity tomography monitoring of soil moisture dynamics in an operational railway embankment. Near Surf. Geophys. 2014, 12, 61–72. [Google Scholar] [CrossRef]
- Leone, M.; Consales, M.; Laudati, A.; Mennella, F.; Cutolo, A.; Cusano, A. Fiber optic thermo-hygrometers for soil moisture and temperature measurements: The SFORI project. In Proceedings of the 24th International Conference on Optical Fibre Sensors, 96342P, Curitiba, Brazil, 28 September 2015; Volume 96342. [Google Scholar]
- Berruti, G.; Consales, M.; Giordano, M.; Sansone, L.; Petagna, P.; Buontempo, S.; Breglio, G.; Cusano, A. Radiation hard humidity sensors for high energy physics applications using polyimide-coated fiber Bragg gratings sensors. Sens. Actuators B Chem. 2013, 177, 94–102. [Google Scholar] [CrossRef]
- Hill, K.O.; Meltz, G. Fiber Bragg Grating Technology Fundamentals and Overview. J. Lightwave Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef]
- Rao, Y.J. In-Fiber Bragg grating sensors. Meas. Sci. Technol. 1997, 8, 355–375. [Google Scholar] [CrossRef]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putnam, M.A.; Friebele, E.J. Fiber Grating Sensors. J. Lightwave Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef]
- Cusano, A.; Cutolo, A.; Albert, J. (Eds.) Fiber Bragg Grating Sensors: Recent Advancements, Industrial Applications and Market Exploitation; Bentham Science Publishers: Sharjah, UAE, 2011; ISBN: 978-1-60805-084-0. [Google Scholar]
- Yeo, T.L.; Sun, T.; Grattan, K.T.V.; Parry, D.; Lade, R.; Powell, B.D. Characterization of a polymer-coated fibre Bragg grating sensor for relative humidity sensing. Sens. Actuators B Chem. 2005, 110, 148–155. [Google Scholar] [CrossRef]
- Kronenberg, P.; Rastogi, P.K.; Giaccari, P.; Limberger, H.G. Relative humidity sensor with optical fiber Bragg grating. Opt. Lett. 2002, 27, 1385–1387. [Google Scholar] [CrossRef] [PubMed]
- Alwis, L.; Sun, T.; Grattan, K.T.V. Optical fibre-based sensor technology for humidity and moisture measurement: Review of recent progress. Measurement 2013, 46, 4052–4074. [Google Scholar] [CrossRef]
- Reynolds, S.G. The gravimetric method of soil moisture determination Part IA study of equipment, and methodological problems. J. Hydrol. 1970, 11, 258–273. [Google Scholar] [CrossRef]
- Kunzler, W.; Calvert, S.G.; Laylor, M. Measuring humidity and moisture with fiber optic sensors. In Proceedings of the Sixth Pacific Northwest Fiber Optic Sensor Workshop, Troutdale, OR, USA, 20 November 2003; Volume 5278. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber Optic Probe | Package Height | Exchange Surface | Package Volume |
|---|---|---|---|
| P1 | 11.5 cm | 4.5 cm | ~180 cm3 |
| P2 | 30 cm | 4.5 cm | ~480 cm3 |
| P3 | 30 cm | 2.7 cm | ~180 cm3 |
| Package Height | Exchange Surface | Package Volume | Thermo-Hygrometer Height |
|---|---|---|---|
| 30 cm | 4.5 cm | 800 cm3 | 14 cm |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leone, M.; Principe, S.; Consales, M.; Parente, R.; Laudati, A.; Caliro, S.; Cutolo, A.; Cusano, A. Fiber Optic Thermo-Hygrometers for Soil Moisture Monitoring. Sensors 2017, 17, 1451. https://doi.org/10.3390/s17061451
Leone M, Principe S, Consales M, Parente R, Laudati A, Caliro S, Cutolo A, Cusano A. Fiber Optic Thermo-Hygrometers for Soil Moisture Monitoring. Sensors. 2017; 17(6):1451. https://doi.org/10.3390/s17061451
Chicago/Turabian StyleLeone, Marco, Sofia Principe, Marco Consales, Roberto Parente, Armando Laudati, Stefano Caliro, Antonello Cutolo, and Andrea Cusano. 2017. "Fiber Optic Thermo-Hygrometers for Soil Moisture Monitoring" Sensors 17, no. 6: 1451. https://doi.org/10.3390/s17061451