3.1. Lagrange Equation for the System
For a general parallel manipulator, the number of associated generalized coordinates is usually equal to the DOF of the moving platform [
32]. In this paper, the generalized coordinates in the general model are set to
, which represent the displacements and rotations of the moving platform along
X-,
Y- and
Z-axes.
The system-generalized speed is defined as the time change rate of the generalized coordinates in the base coordinate system.
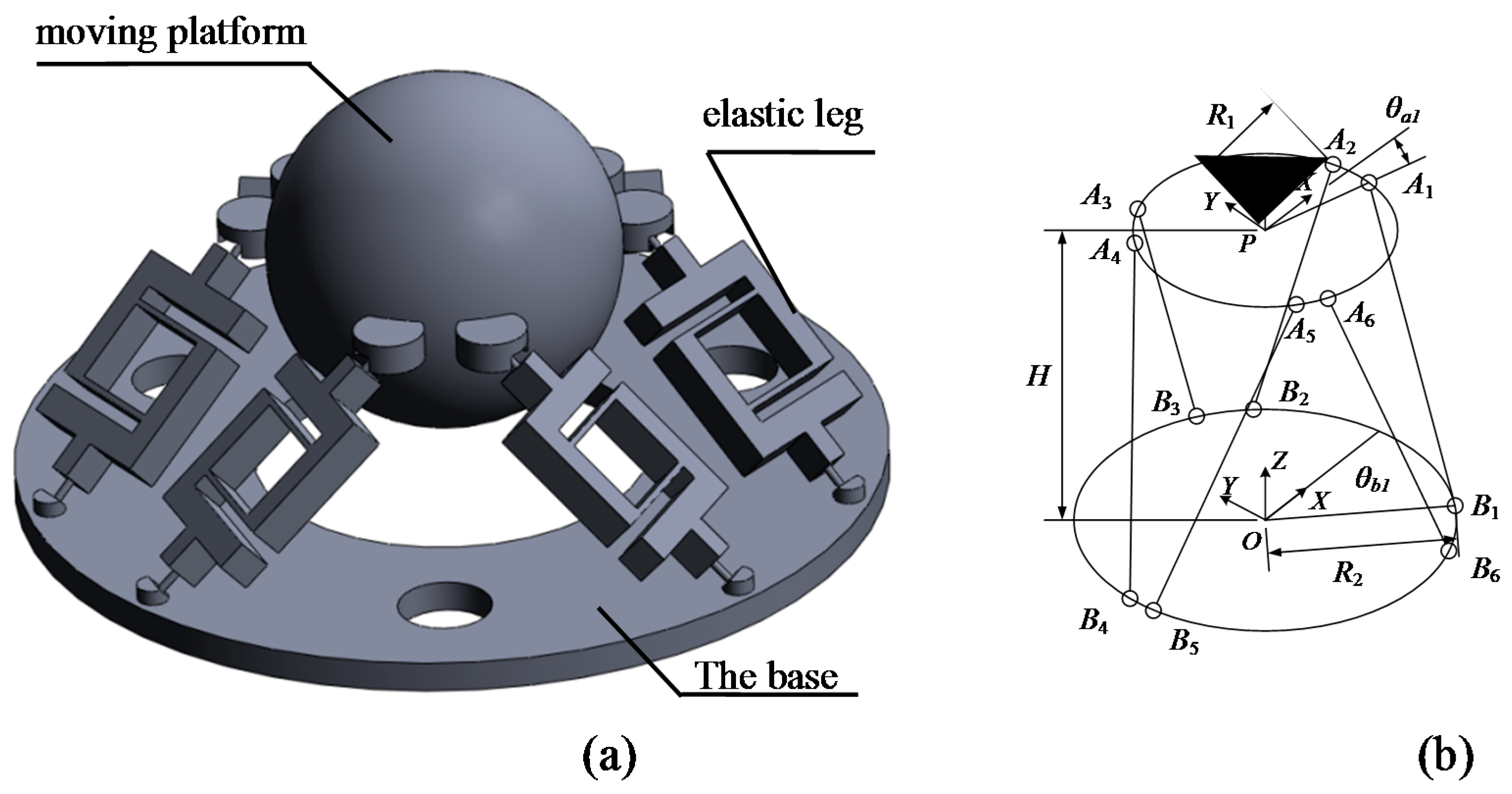
The local coordinate of the moving platform with respect to the base is described by a translation vector
P and rotation matrix
R, and the initial coordinate of the vector
P is [0,0,H]
T. In the base coordinate
O-
XYZ, the position and pose matrix of the moving platform is written as:
In Cartesian coordinate system,
P-
XYZ, vectors of points
Ai are written as:
In the Cartesian coordinate system,
O-
XYZ, vectors of points
Bi can be written:
By coordinate conversion, Vector Ai is converted to in the coordinate system defined by
O-XYZ.
Li, the position vector of the
ith leg, can be calculated as:
After differentiating Equation (4) with respect to time, velocity vectors of point Ai are:
where
v and
ω are the velocity and angular velocity of the moving platform respectively, and
ri is the radius vector from point
P to point
Ai after rotation of the moving platform, which can be expressed as
ri =
RAi.
Velocity vectors of point
Ai, which is the vectorial sum of the axial velocity and the tangential speed along the elastic leg can also be calculated as:
where
li is the unit vector of the leg, which is expressed as
, and
is the angular velocity of the leg.
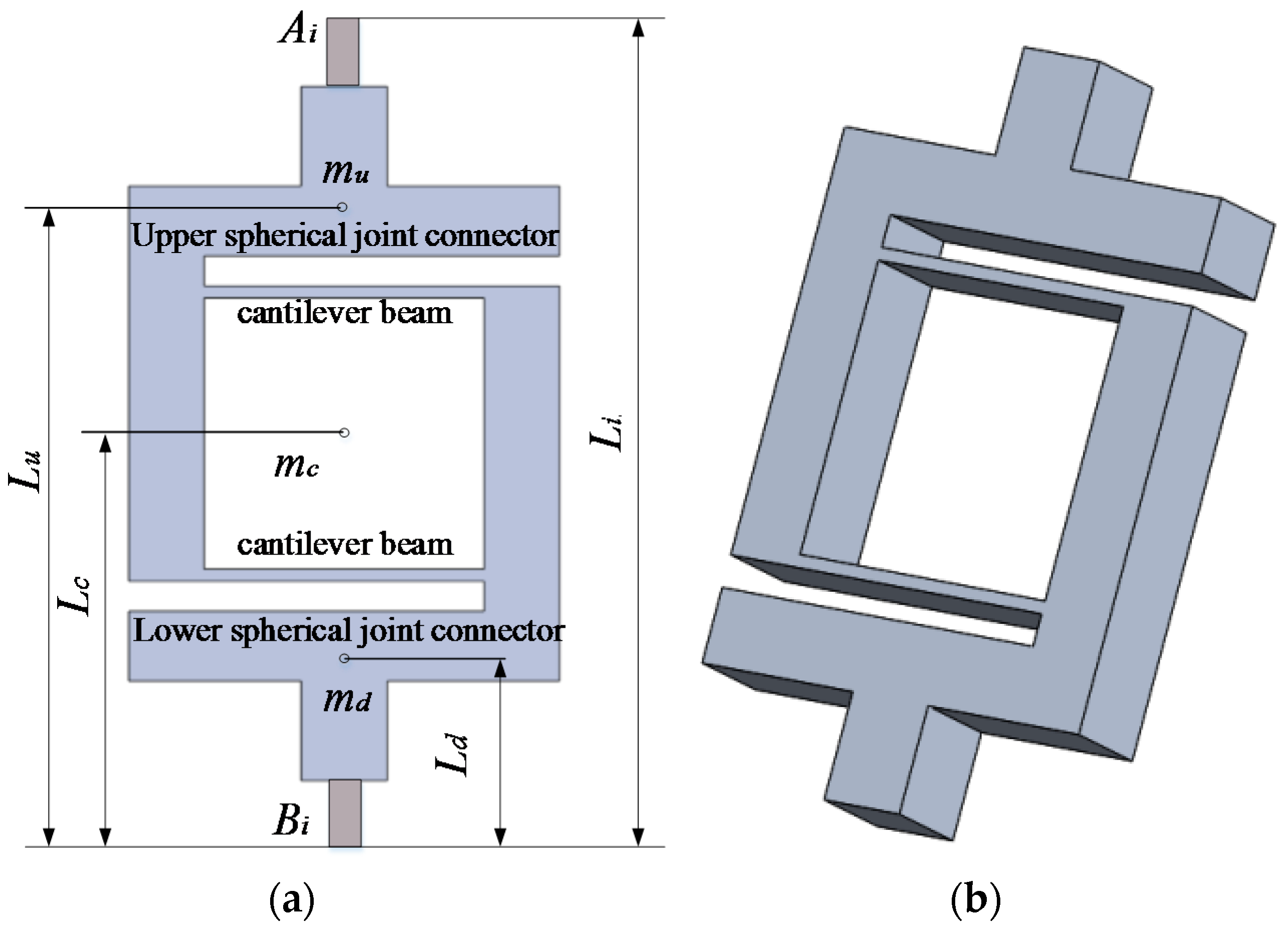
As shown in
Figure 2, the DCB elastic leg consists of three parts: an upper spherical joint connector, a double cantilever beam and a lower spherical joint connector. The mass centroids of the upper spherical joint connector, double cantilever beam and lower spherical joint connector are
mu,
mc and
md respectively.
Lu,
Lc and
Ld denote the distance between mass centroids and the connection points
Bi respectively.
The partial angular velocities on each point of the leg are identical. Substituting Equation (5) into Equation (6), the angular velocity of the leg is obtained by taking the cross product with
li on both sides of the equation:
The velocity of the mass center is the vectorial sum of the axial velocity and the tangential speed along the elastic leg on the mass centroid. The axial velocity on the mass centroid of the double flexible cantilevers is half that of the whole leg, and that on the mass centroid of the lower spherical joint connector is zero. The velocity of the mass center along the elastic leg can be calculated using:
The Lagrange equation of the accelerometer can be written as:
where
ET is the kinetic energy of the system, and
qj and
are the
jth generalized coordinates and generalized speed, respectively.
Qj is the generalized force. The moving parts of the system are the six elastic legs and the moving platform, and each elastic leg consists of three moving parts. The kinetic energy of the system is a summation of the translational kinetic energy and rotational kinetic energy of the 19 moving parts, which can be expressed as:
where
mi and
Ui are the mass and velocity vector of the
ith part, and
Ii and
ωli are the moment of inertia and angular velocity vector of the
ith part, respectively. According to the differential transformation,
,
and
Qj can be calculated as:
where
g is the gravity vector and
Fl is the force of the
lth elastic leg. Considering all six generalized coordinates, Lagrange equations of all the generalized coordinates are translated into differential equations for the motion:
where
M is the mass matrix,
C is the damping matrix,
K is the stiffness matrix and
F is the force vector acting on the system. Because of the minimal speed on the elastic leg, the damping matrix that is related to
Ui and
ωli can be ignored in the motion differential equation, which may then be simplified to:
3.2. Mass Matrix of the System
Referring to Equation (11), the mass matrix can be calculated as:
where
is the velocity Jacobian matrix of the
ith part, derived from the velocity vector on the mass centroid with respect to the generalized speed, and
is the angular velocity matrix of the
ith part, derived from the angular velocity vector of each part with respect to the generalized speed.
The mass of the moving platform can be calculated using the sphere quality function , where m is the quality of the sphere, r is the radius of the moving platform and ρ is the density of the material. The moment of inertia along the x-, y-, and z-axes is given by .
The mass and moment of inertia of the elastic leg is obtained through the Solidworks environment. Based on the parallel axis theorem, the moment of inertia of the parts with respect to the base coordinate can be expressed as:
where
Iio is the moment of inertia with respect to the mass center;
dx,
dy and
dz are the distances between the mass center of each part and point
O along the
X,
Y,
Z axis, respectively;
Ti is the rotation matrix which rotates the local coordinate system on the lower spherical joint connector to the base coordinate system; and
mi is the mass of the
ith part.
The velocity Jacobian matrix and angular velocity matrix of the moving platform are formed by differentiating Equation (1) with respect to
and
, respectively:
By differentiating Equation (7) with respect to
, the angular velocity matrix of the elastic leg is obtained:
where the matrix marked by “^” is an anti-symmetric matrix of the vector, such as
, where
can be expressed as
.
Differentiating Equation (8) with respect to
, the velocity Jacobian matrix of the mass center along the elastic leg is obtained:










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}