
Fabrication of Micro-Needle Electrodes for Bio-Signal Recording by a Magnetization-Induced Self-Assembly Method

Abstract
:1. Introduction
2. Materials and Methods
2.1. ME Fabrication
2.1.1. Material Preparation
2.1.2. Micro-Needle Array (MA) Fabrication
2.1.3. MA Coating
2.1.4. ME Assembly
2.2. Mechanical Tests
2.2.1. Fracture Test
2.2.2. Insertion Test ex Vivo
2.3. Bio-Signals Recording
2.3.1. EII Test during the Insertion Process
2.3.2. EMG Test
2.3.3. ECG Test
3. Results and Discussion
3.1. ME Fabrication and Characterization
3.2. Fracture Test
3.3. Insertion Test ex Vivo
3.4. Bio-Signal Measurement
3.4.1. EII Measurement
3.4.2. EMG Measurement
3.4.3. ECG Measurement
4. Conclusions
- (1)
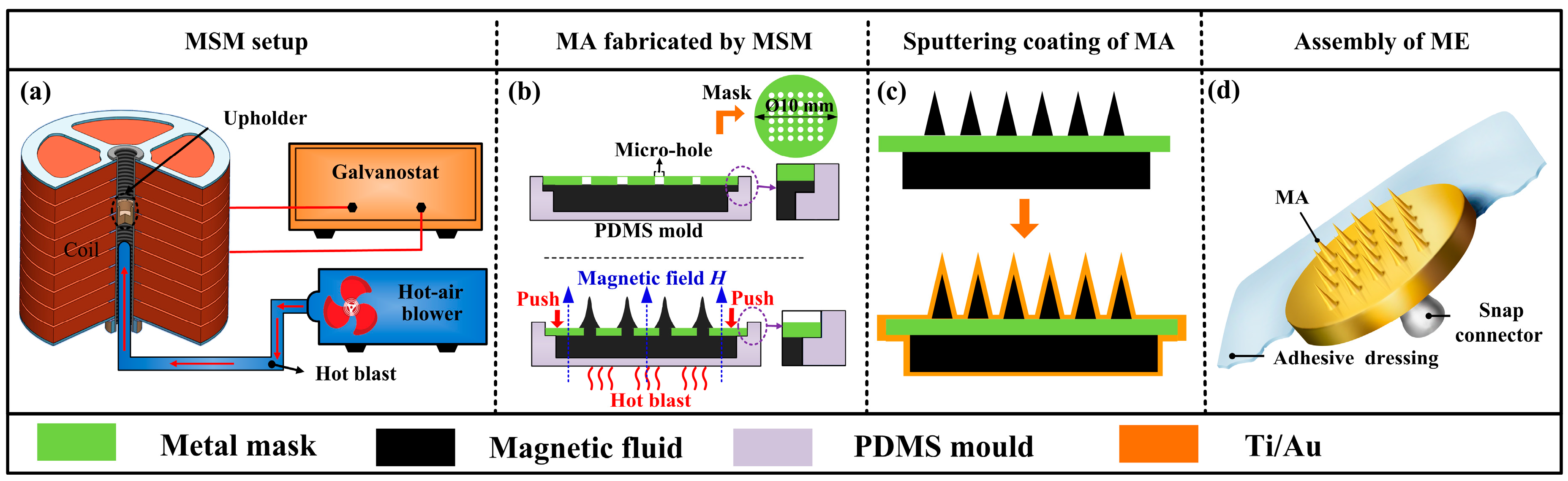
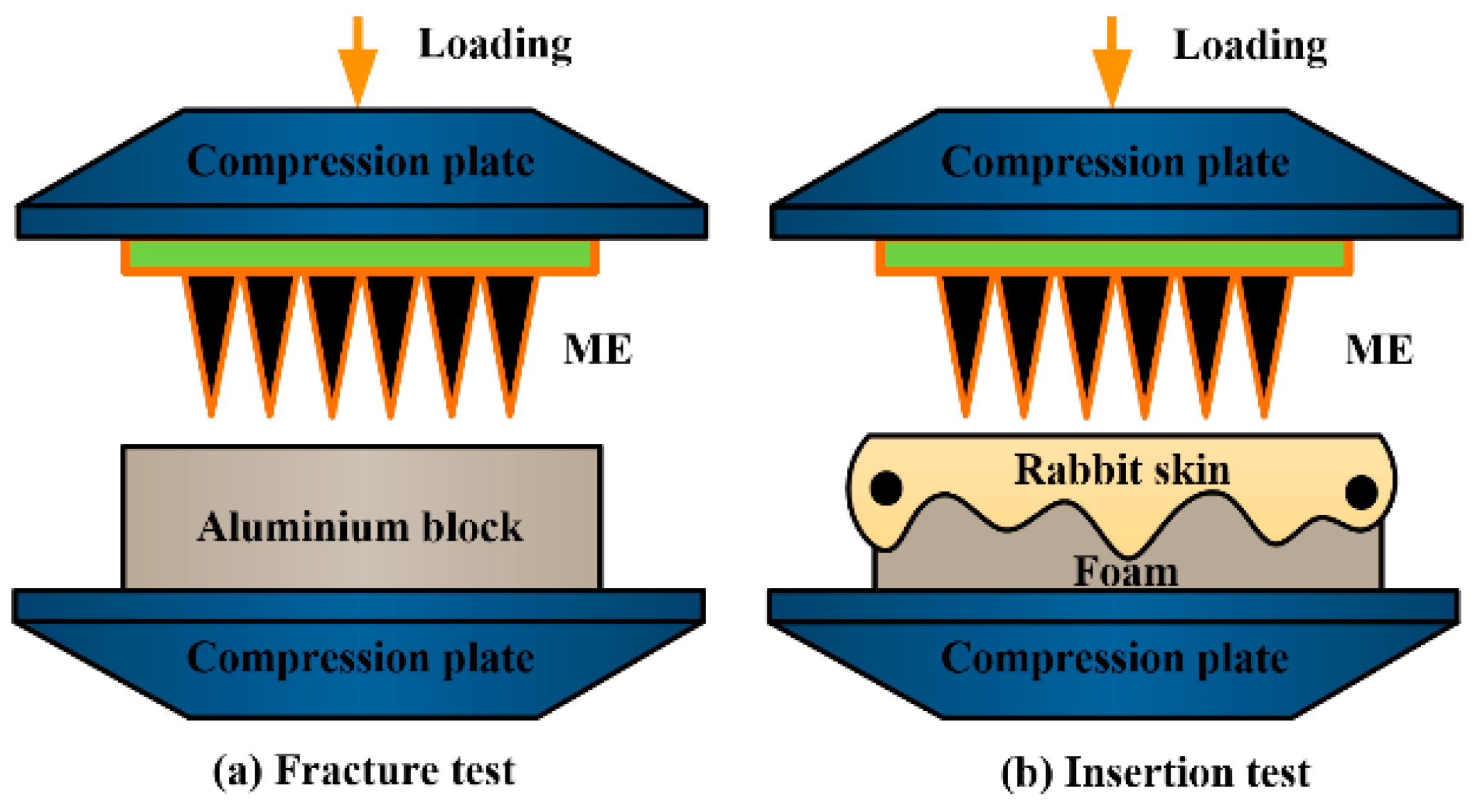
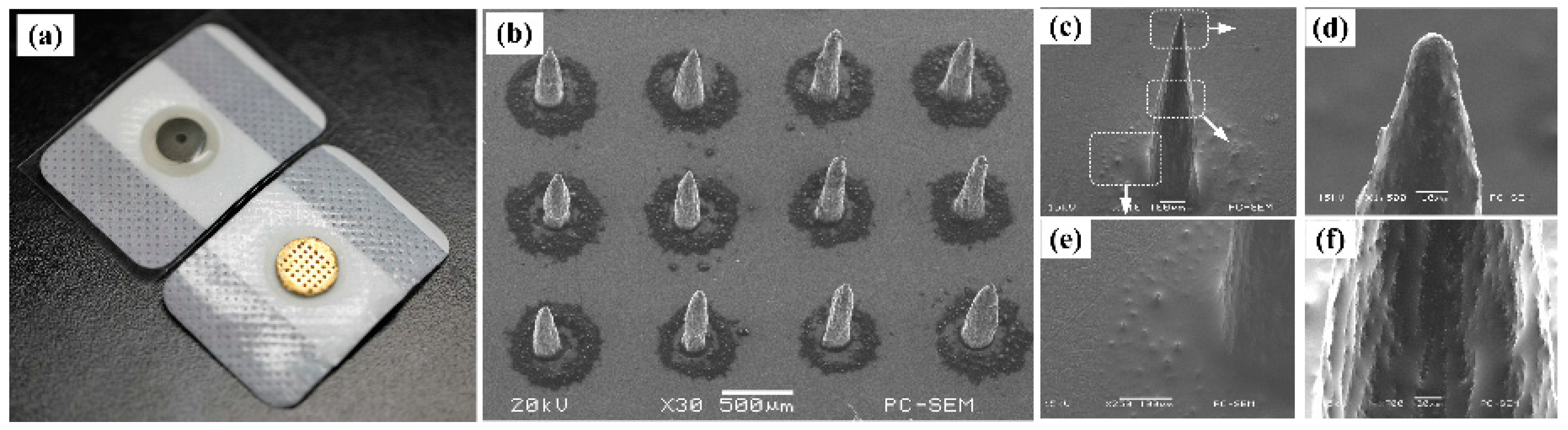
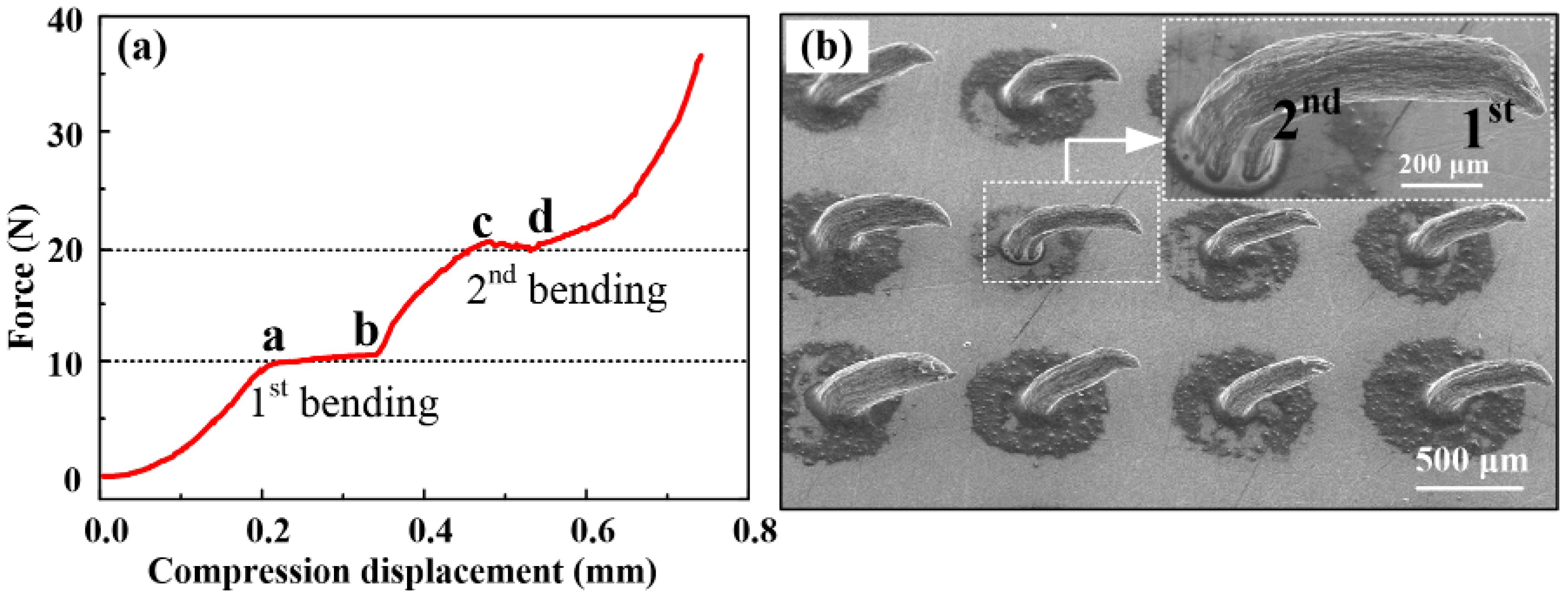
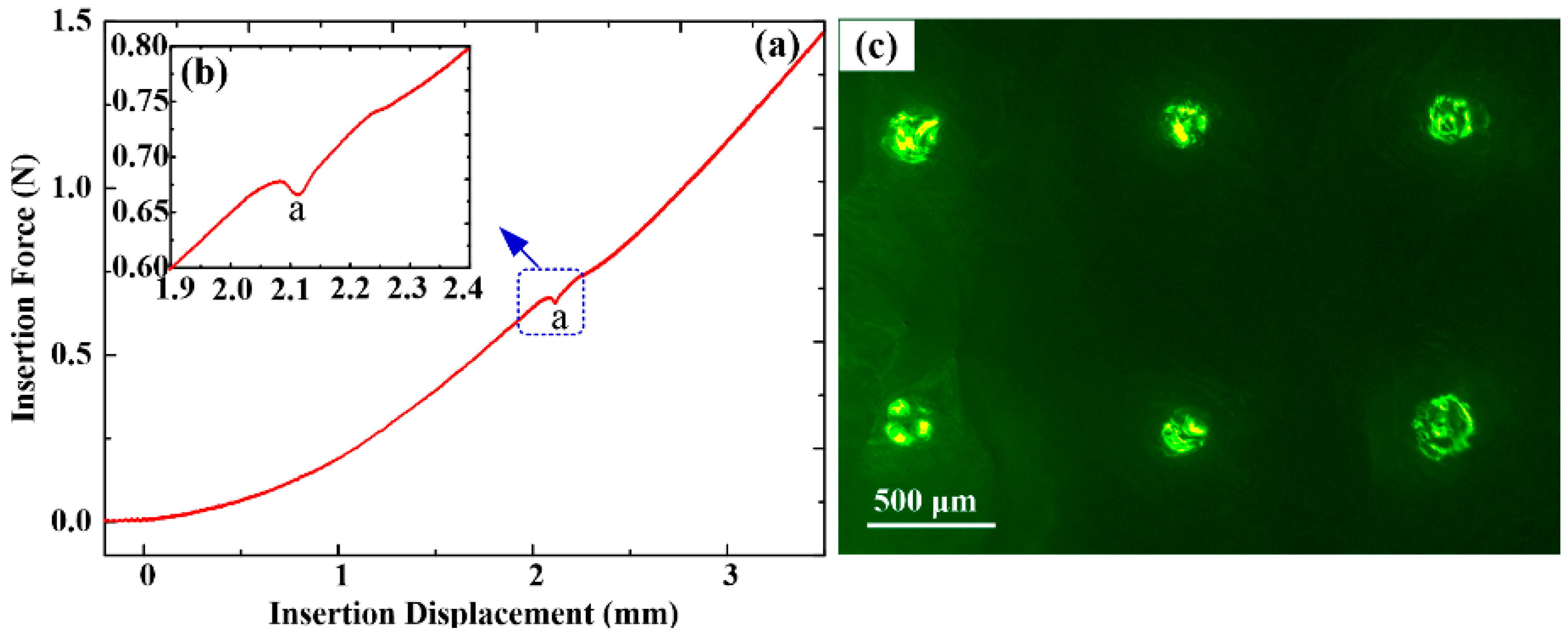
- A MA can be self-assembled from a magnetic droplet array under the sum of gravitational, surface tension, and magnetic potential energies. The MEs were coated with Ti/Au films to guarantee their compatibility. The microneedle length is about 700 μm and its tip is sharp. Micro-needles of ME have good toughness and the buckling force is about 10 N. MEs also can easily pierce rabbit skin without being broken or buckling and their penetration force is about 0.68 N, so MEs can be easily fabricated by MSM and have good mechanical properties.
- (2)
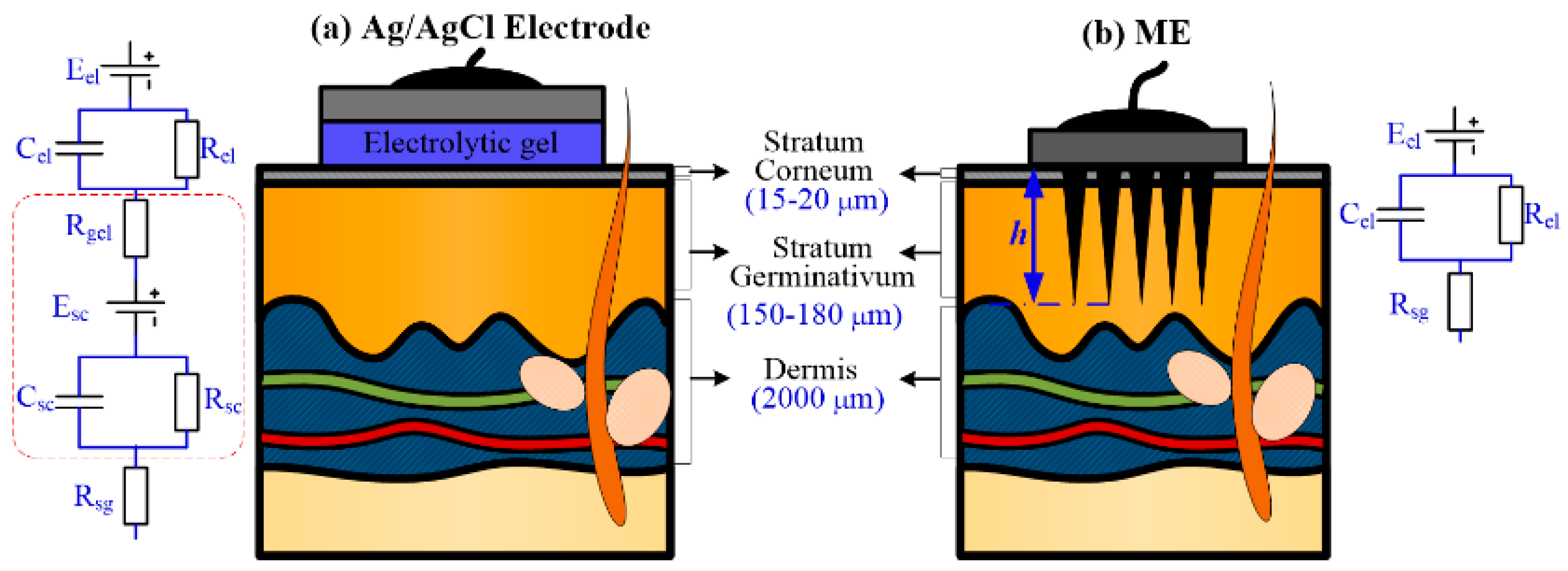
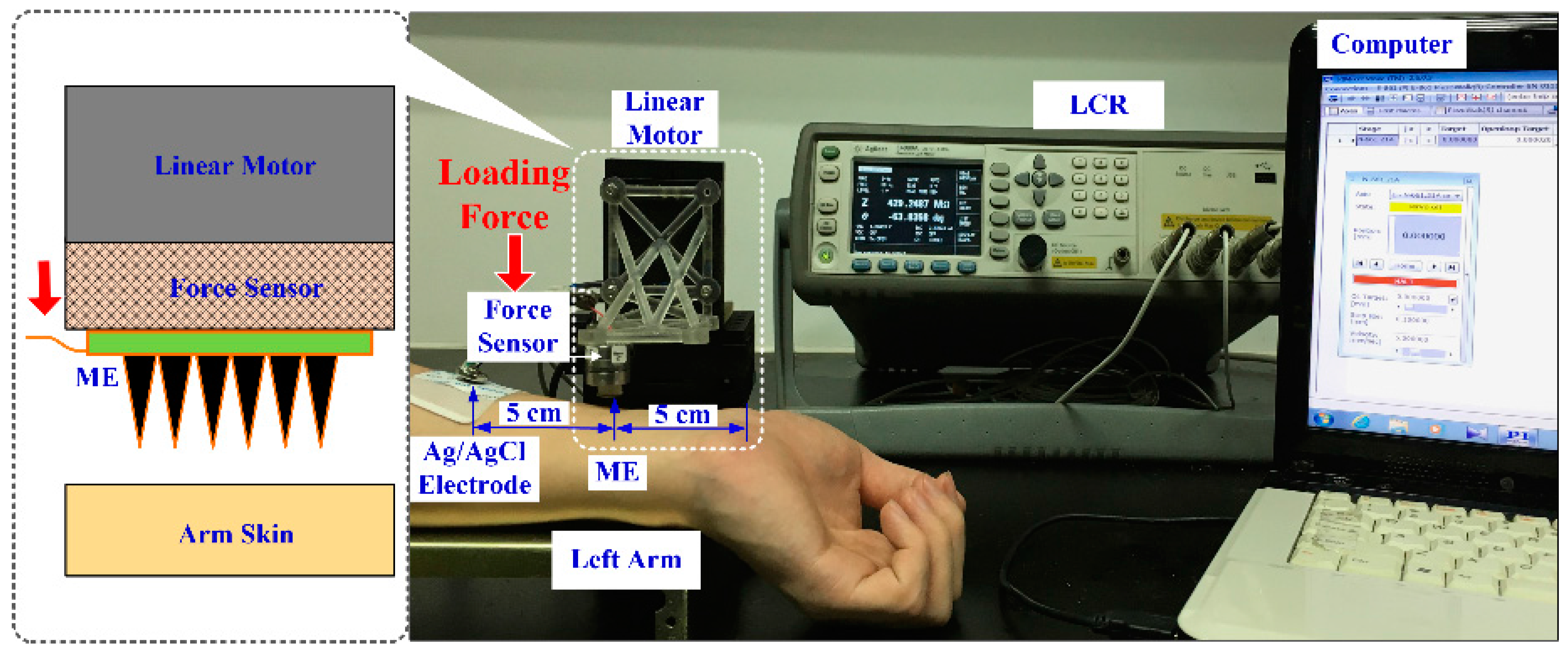
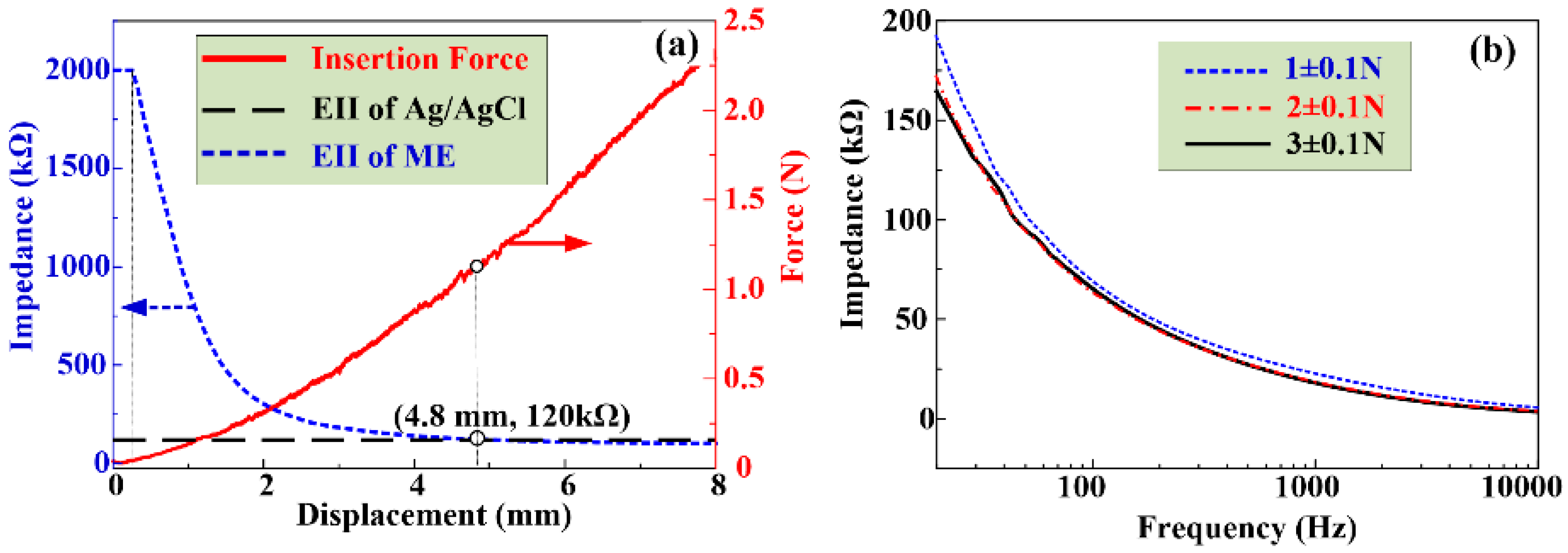
- The EII of a ME decreases rapidly as microneedles are pressed and pierced into the forearm skin one by one. The insertion process in vivo is different from that ex vivo due to the skin type and deformation. As the compression force pressed on the ME is larger than 2 N, the EII of ME reaches a steady constant value of about 108 KΩ which is lower than that measured by Ag/AgCl electrodes (120 KΩ), so a ME can stably record EII or bio-signals under a relative low compression force.
- (3)
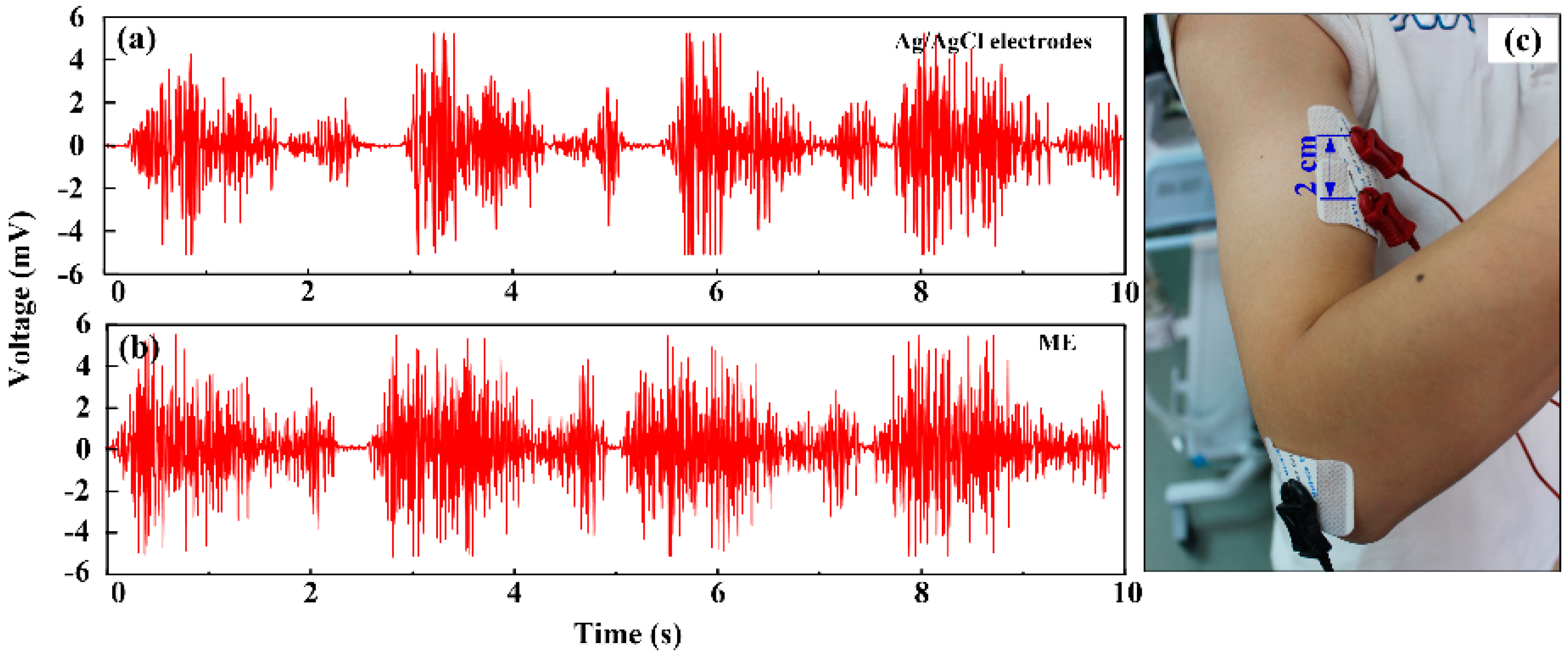
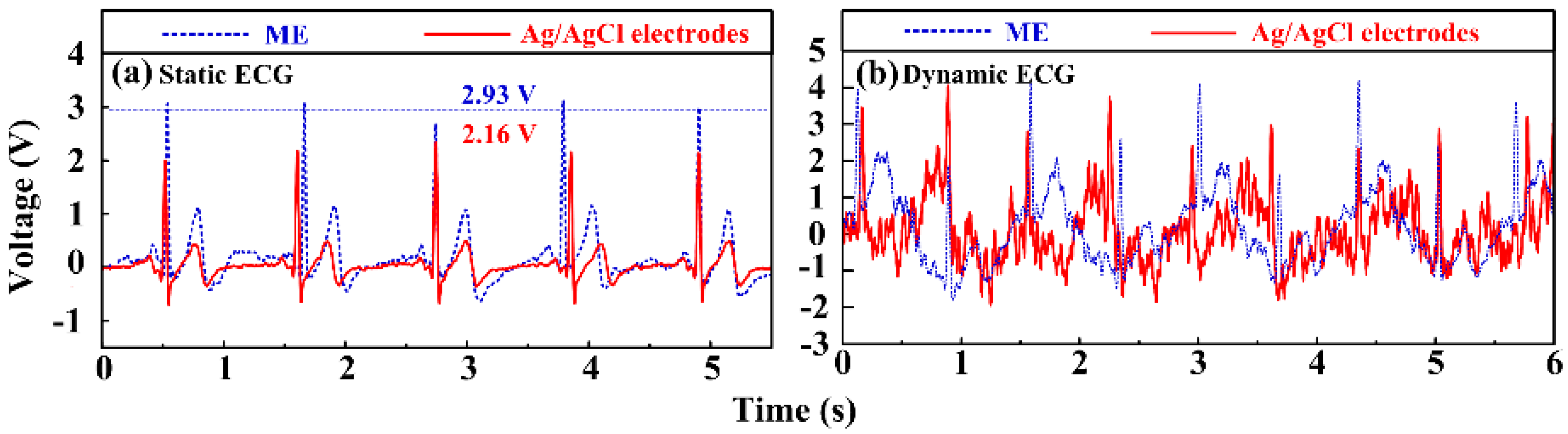
- The ME can depict the periodical fluctuations of EMG signals along with the rhythmical contraction of the biceps brachii muscle without skin preparation. The ME could record static ECG signals with a larger amplitude in comparison with a Ag/AgCl electrode due to the elimination of the stratum corneum layer impedance. Besides, the ME could collect more distinguishable dynamic ECG signals in comparison with the Ag/AgCl electrode, so the ME is a promising alternative electrode compared with conventional Ag/AgCl electrodes in some specific bio-signal recording situations.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Merletti, R. The electrode-skin interface and optimal detection of bioelectric signals. Physiol. Meas. 2010, 31, 995–1000. [Google Scholar] [CrossRef]
- Roy, S.H.; Luca, G.D.; Cheng, M.S.; Johansson, A.; Gilmore, L.D.; De Luca, C.J. Electro-mechanical stability of surface EMG sensors. Med. Biol. Eng. Comput. 2007, 45, 447–457. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.; Cheng, D.C.; Song, R.; Zhang, C.J.; Xu, W.P.; Pan, X.L. Characterization of alternating current impedance properties of biomedical electrodes. J. Cent. South Univ. 2013, 20, 1254–1258. [Google Scholar] [CrossRef]
- Hoffmann, K.P.; Ruff, R. Flexible dry surface-electrodes for ECG long-term monitoring. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 5740–5743.
- Forvi, E.; Bedoni, M.; Carabalona, R.; Soncini, M.; Mazzoleni, P.; Rizzo, F.; O’Mahony, C.; Morasso, C.; Cassarà, D.G.; Gramatica, F. Preliminary technological assessment of microneedles-based dry electrodes for biopotential monitoring in clinical examinations. Sens. Actuators A Phys. 2012, 180, 177–186. [Google Scholar] [CrossRef]
- O’Mahony, C.; Pini, F.; Blake, A.; Webster, C.; O’Brien, J.; Mccarthy, K.G. Microneedle-based electrodes with integrated through-silicon via for biopotential recording. Sens. Actuators A Phys. 2012, 186, 130–136. [Google Scholar] [CrossRef]
- Kim, M.; Kim, T.; Kim, D.S.; Chung, W.K. Curved microneedle array-based sEMG electrode for robust long-term measurements and high selectivity. Sensors 2015, 15, 16265–16280. [Google Scholar] [CrossRef] [PubMed]
- Lapatki, B.G.; Stegeman, D.F.; Jonas, I.E. A surface EMG electrode for the simultaneous observation of multiple facial muscles. J. Neurosci. Meth. 2003, 123, 117–128. [Google Scholar] [CrossRef]
- Baek, J.Y.; An, J.H.; Choi, J.M.; Park, K.S.; Lee, S.H. Flexible polymeric dry electrodes for the long-term monitoring of ECG. Sens. Actuators A Phys. 2008, 143, 423–429. [Google Scholar] [CrossRef]
- Zhou, W.; Song, R.; Pan, X.L.; Peng, Y.J.; Qi, X.Y.; Peng, J.H.; Hui, K.S.; Hui, K.N. Fabrication and impedance measurement of novel metal dry bioelectrode. Sens. Actuators A Phys. 2013, 201, 127–133. [Google Scholar] [CrossRef]
- Davis, S.P.; Landis, B.J.; Adams, Z.H.; Allen, M.G.; Prausnitz, M.R. Insertion of microneedles into skin: Measurement and prediction of insertion force and needle fracture force. J. Biomech. 2004, 37, 1155–1163. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.M.; Tay, F.E.H.; Guo, D.G.; Xu, L.; Yap, K.L. A microfabricated electrode with hollow microneedles for ECG measurement. Sens. Actuators A Phys. 2009, 151, 17–22. [Google Scholar] [CrossRef]
- Hsu, L.S.; Tung, S.W.; Kuo, C.H.; Yang, Y.J. Developing barbed micro tip-based electrode arrays for biopotential measurement. Sensors 2014, 14, 12370–12386. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.F.; Liu, J.Q.; Yan, X.X.; Yang, B.; Yang, C.S. A MEMS-based pyramid micro-needle electrode for long-term EEG measurement. Microsyst. Technol. 2012, 19, 269–276. [Google Scholar] [CrossRef]
- Wang, R.X.; Zhao, W.; Wang, W.; Li, Z.H. A flexible microneedle electrode array with solid silicon needles. J. Microelectromech. Syst. 2012, 21, 1084–1089. [Google Scholar] [CrossRef]
- Wang, R.X.; Wei, Z.W.; Wang, W.; Li, Z.H. Flexible microneedle electrode array based-on parylene substrate. In Proceedings of the 16th International Conference on Miniaturized Systems for Chemistry and Life Sciences, Okinawa, Japan, 28 October–1 November 2012; pp. 1249–1251.
- Van Der Maaden, K.; Jiskoot, W.; Bouwstra, J. Microneedle technologies for (trans)dermal drug and vaccine delivery. J. Control. Release 2012, 161, 645–655. [Google Scholar] [CrossRef] [PubMed]
- Shikida, M.; Ando, M.; Ishihara, Y.; Ando, T.; Sato, K.; Asaumi, K. Non-photolithographic pattern transfer for fabricating pen-shaped microneedle structures. J. Micromech. Microeng. 2004, 14, 1462–1467. [Google Scholar] [CrossRef]
- Liu, R.; Yang, X.Y.; Jin, C.Y.; Fu, J.J.; Chen, W.X.; Liu, J. Development of three-dimension microelectrode array for bioelectric measurement using the liquid metal-micromolding technique. Appl. Phys. Lett. 2013, 103, 193701. [Google Scholar] [CrossRef]
- Wang, R.X.; Huang, X.J.; Liu, G.F.; Wang, W.; Dong, F.T.; Li, Z.H. Fabrication and characterization of a parylene-based three-dimensional microelectrode array for use in retinal prosthesis. J. Microelectromech. Syst. 2010, 19, 367–374. [Google Scholar] [CrossRef]
- Nishinaka, Y.; Jun, R.; Prihandana, G.S.; Miki, N. Fabrication of polymer microneedle electrodes coated with nanoporous parylene. Jpn. J. Appl. Phys. 2013, 52, 06GL10. [Google Scholar] [CrossRef]
- Ren, L.; Jiang, Q.; Chen, K.Y.; Chen, Z.P.; Pan, C.F.; Jiang, L.L. Fabrication of a micro-needle array electrode by thermal drawing for bio-signals monitoring. Sensors 2016, 16, 908. [Google Scholar] [CrossRef] [PubMed]
- Pan, C.F.; Chen, K.Y.; Jiang, L.L.; Chen, Z.P.; Ren, L.; Liang, L.; Yuan, W. Magnetization-induced self-assembling method: Micro-needle array fabrication. J. Mater. Process. Tech. 2016, 227, 251–258. [Google Scholar] [CrossRef]
- Resnik, D.; Mozek, M.; Pecar, B.; Dolzan, T.; Janez, A.; Urbancic, V.; Vrtacnik, D. Characterization of skin penetration efficacy by Au-coated Si microneedle array electrode. Sens. Actuators A Phys. 2015, 232, 299–309. [Google Scholar] [CrossRef]
- Gomaa, Y.A.; Morrow, D.I.J.; Garland, M.J.; Donnelly, R.F.; El-Khordagui, L.K.; Meidan, V.M. Effects of microneedle length, density, insertion time and multiple applications on human skin barrier function: Assessments by transepidermal water loss. Toxicol. in Vitro 2010, 24, 1971–1978. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Dai, M.; Xu, C.; Chen, C.; Tang, M.; Shi, X.; Dong, X. Performance evaluation of five types of Ag/AgCl bio-electrodes for cerebral electrical impedance tomography. Ann. Biomed. Eng. 2011, 39, 2059–2067. [Google Scholar] [CrossRef] [PubMed]
- King, L.B.; Meyer, E.; Hopkins, M.A.; Hawkett, B.S.; Jain, N. Self-assembling array of magnetoelectrostatic jets from the surface of a superparamagnetic ionic liquid. Langmuir 2014, 30, 14143–14150. [Google Scholar] [CrossRef] [PubMed]
- Gailitis, A. Formation of the hexagonal pattern on the surface of a ferromagnetic fluid in an applied magnetic field. J. Fluid Mech. 1977, 82, 401–413. [Google Scholar] [CrossRef]
- Li, K.; Ju, J.; Xue, Z.X.; Ma, J.; Feng, L.; Gao, S.; Jiang, L. Structured cone arrays for continuous and effective collection of micron-sized oil droplets from water. Nat. Commun. 2013, 4, 2276. [Google Scholar] [CrossRef] [PubMed]
- Khan, H.; Mehta, P.; Msallam, H.; Armitage, D.; Ahmad, Z. Smart microneedle coatings for controlled delivery and biomedical analysis. J. Drug Target. 2014, 22, 790–795. [Google Scholar] [CrossRef] [PubMed]
- McCrudden, M.T.C.; Alkilani, A.Z.; McCrudden, C.M.; McAlister, E.; McCarthy, H.O.; Woolfson, A.D.; Donnelly, R.F. Design and physicochemical characterisation of novel dissolving polymeric microneedle arrays for transdermal delivery of high dose, low molecular weight drugs. J. Control. Release 2014, 180, 71–80. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, Z.; Stride, E.; Edirisinghe, M. Novel preparation of transdermal drug-delivery patches and functional wound healing materials. J. Drug Target. 2009, 17, 724–729. [Google Scholar] [CrossRef] [PubMed]
- Miller, P.R.; Skoog, S.A.; Edwards, T.L.; Wheeler, D.R.; Xiao, X.; Brozik, S.M.; Polsky, R.; Narayan, R.J. Hollow microneedle-based sensor for multiplexed transdermal electrochemical sensing. J. Vis. Exp. 2012, 64, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Valdés-Ramírez, G.; Li, Y.C.; Kim, J.; Jia, W.; Bandodkar, A.J.; Nuñez-Flores, R.; Miller, P.R.; Wu, S.-Y.; Narayan, R.; Windmiller, J.R.; et al. Microneedle-based self-powered glucose sensor. Electrochem. Commun. 2014, 47, 58–62. [Google Scholar] [CrossRef]
- Kim, N.W.; Lee, M.S.; Kim, K.R.; Lee, J.E.; Lee, K.; Park, J.S.; Matsumoto, Y.; Jo, D.G.; Lee, H.; Lee, D.S.; et al. Polyplex-releasing microneedles for enhanced cutaneous delivery of DNA vaccine. J. Control. Release 2014, 179, 11–17. [Google Scholar] [CrossRef] [PubMed]
- Vazquez, P.; Herzog, G.; O’Mahony, C.; O’Brien, J.; Scully, J.; Blake, A.; O’Mathuna, C.; Galvin, P. Microscopic gel-liquid interfaces supported by hollow microneedle array for voltammetric drug detection. Sens. Actuators B Chem. 2014, 201, 572–578. [Google Scholar] [CrossRef]
- Oh, J.; Liu, K.W.; Medina, T.; Kralick, F.; Noh, H. A novel microneedle array for the treatment of hydrocephalus. Microsyst. Technol. 2014, 20, 1169–1179. [Google Scholar] [CrossRef] [PubMed]
- Cho, W.K.; Ankrum, J.A.; Guo, D.G.; Chester, S.A.; Yang, S.Y.; Kashyap, A.; Campbell, G.A.; Wood, R.J.; Rijal, R.K.; Karnik, R.; et al. Microstructured barbs on the north American porcupine quill enable easy tissue penetration and difficult removal. Proc. Natl. Acad. Sci. USA 2012, 109, 21289–21294. [Google Scholar] [CrossRef] [PubMed]
- Khanna, P.; Luongo, K.; Strom, J.A.; Bhansali, S. Sharpening of hollow silicon microneedles to reduce skin penetration force. J. Micromech. Microeng. 2010, 20, 045011. [Google Scholar] [CrossRef]
- Griss, P.; Enoksson, P.; Tolvanen-Laakso, H.K.; Merilainen, P.; Ollmar, S.; Stemme, G. Micromachined electrodes for biopotential measurements. J. Microelectromech. Syst. 2001, 10, 10–16. [Google Scholar] [CrossRef]
- Larraneta, E.; Moore, J.; Vicente-Perez, E.M.; Gonzalez-Vazquez, P.; Lutton, R.; Woolfson, A.D.; Donnelly, R.F. A proposed model membrane and test method for microneedle insertion studies. Int. J. Pharm. 2014, 472, 65–73. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Epoxy Novolac Resin | Aliphatic Amine | Unit |
|---|---|---|---|
| Density | 1.22 | 1.05 | g/mL |
| Viscosity | 500 (66 °C) | 50–110 (25 °C) | MPa·s |
| Chemical Formula |  |  | N/A |
| Polycondensation Equation |  | ||
| Properties | Value | Unit |
|---|---|---|
| Diameter | 50 ± 15 | nm |
| Purity | >99.9% | N/A |
| Specific area | 30 | m2/g |
| Density | 7.9 | g/cm3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Ren, L.; Chen, Z.; Pan, C.; Zhou, W.; Jiang, L. Fabrication of Micro-Needle Electrodes for Bio-Signal Recording by a Magnetization-Induced Self-Assembly Method. Sensors 2016, 16, 1533. https://doi.org/10.3390/s16091533
Chen K, Ren L, Chen Z, Pan C, Zhou W, Jiang L. Fabrication of Micro-Needle Electrodes for Bio-Signal Recording by a Magnetization-Induced Self-Assembly Method. Sensors. 2016; 16(9):1533. https://doi.org/10.3390/s16091533
Chicago/Turabian StyleChen, Keyun, Lei Ren, Zhipeng Chen, Chengfeng Pan, Wei Zhou, and Lelun Jiang. 2016. "Fabrication of Micro-Needle Electrodes for Bio-Signal Recording by a Magnetization-Induced Self-Assembly Method" Sensors 16, no. 9: 1533. https://doi.org/10.3390/s16091533